基于逐像素概率预测的图像隐写定位研究
2022-06-23 06:24陈升,李智
计算机工程与应用 2022年12期
陈 升,李 智
贵州大学 计算机科学与技术学院,贵阳 550025
图像隐写术是通信和隐私保护中利用图像载体进行隐秘通信和保障安全的技术,通常是在图像空域中对像素值进行修改,进而完成对信息的隐藏,早期的非内容自适应隐写算法,比如最低有效位替换算法(least significant bit,LSB),不针对载体内容,将嵌入的0、1 bit流对载体图像像素的最低比特位进行替换。目前,隐写术的研究热点是内容自适应隐写术,内容自适应的图像隐写术是将隐藏信息嵌入在内容较为复杂的区域,这些区域很难被人眼所察觉,常见的自适应隐写术有HUGO[1]、WOW[2]、S-UNIWARD[3]。隐写分析是应对隐写术所产生的安全问题并与之对抗的技术,目前研究的热点是内容自适应隐写算法的被动隐写分析,即判断图像是否经过隐写。
在传统的被动隐写分析研究中,主要有基于手工构造特征的方案,常见的空域隐写分析方法有基于构造临近像素差异矩阵的SPAM[4]、基于构造高维共生矩阵的富模型SRM[5],以及通过估计待测图像的修改概率图,为残差特征分配不同权重,在富模型基础上改进后的tSRM[6]、maxSRM[7]等。随着深度学习的发展,利用卷积神经网络(CNN)完成隐写分析任务得以实现,Tang等[8]在2014年首次利用CNN进行隐写分析,有了初始化预处理层卷积核参数的思想,提出一种简称TanNet的网络,性能优于基于手工构造特征的SPAM次于SRM。2015年Qian等[9]提出的隐写分析网络GNCNN中,利用固定KV核进行预处理第一层卷积核,卷积层使用高斯激活函数代替ReLU、Sigmoid,实现了与SRM相当的隐写检测性能。Xu等[10]在2016年在网络中引入批归一化(BN),全局平均池化和绝对值激活函数,提出简称XuNet的隐写分析网络,首次超过SRM的隐写检测性能。2017年Ye等[11]利用SRM中的30个高通滤波器对网络的第一层卷积核的参数初始化,自定义一种称为截止线性单元的激活函数,结合传统隐写分析的思想,在深度学习中引入选择通道,提升了对隐写嵌入的检测。2018年,Boroumand等人提出SRNet[12],该模型整体由四部分不同作用的卷积层模块组成,有效地利用BN层和残差网络,并且加入通道选择,提高了模型对隐写算法的检测准确率。
被动隐写分析技术,也是目前隐写分析研究的热点,在这一目标并不能对隐匿的信息采取进一步主动的措施,于是许多学者对进一步的隐写负载定位展开研究,隐写定位的研究既可判断图像是否经过隐写,也为进一步隐写信息的提取提供了条件。
在隐写术负载定位研究中,文献[13]中,通过分析图像色调直方图变化来定位连续嵌入的空域彩色图负载。2008年Ker等[14]对载体进行线性滤波处理后计算像素平均残差,成功定位出非内容自适应隐写算法LSB的隐写像素。2012年,Quach等[15]基于像素频数构造权重表,定位出了组奇偶(group-parity)隐写术的隐写像素位置。2019年,Sun等[16]利用深度神经网络,提出了用于定位LSB matching隐写术[17]的有效负载像素的网络模型,该网络通过提取像素的临近像素差异特征来区分像素和隐写像素,临近像素差异特征就是提取纹理区域的特征,而纹理区域中同时包含未经嵌入和经嵌入的像素,致使该方法容易将图像中纹理区域中未经嵌入的像素混淆造成误报,该方法中将纹理区域的像素视为无效像素,而内容自适应隐写术就是对视觉掩蔽效果较好纹理复杂的区域进行嵌入,无视掉纹理区域的像素该方法便对内容自适应隐写术失效。然而目前,针对内容自适应隐写术负载定位的研究近乎空白,仅查阅到一篇学位论文[18],该文献的思想是从嵌入者的思路来预测隐写后的隐写像素的位置,用较低嵌入率的隐写图像预测二次嵌入的位置,一旦嵌入时的策略不再针对具体区域(倾向纹理区域),或者随机嵌入至平滑区域,该方法便已失效。
本文针对目前隐写分析往往只能判别载体图像中是否存在隐密信息,并不能对隐密信息的具体位置进行标识,为进一步增强隐写分析的实用性,将隐写分析的研究目标拓展为自适应隐写术和非自适应隐写术LSB matching的负载像素定位,提出一种端到端的图像隐写定位网络PSL_NET,在输入端输入一张图像,输出端预测得到图像的负载像素位。基于预测载体图像每位像素的隐写概率,最终定位出图像的隐写像素。研究的工作中包含以下内容:
(1)利用传统隐写分析方法富模型中的30个线性的SRM高通滤波器初始化网络第一层卷积核的参数,提取出图像的残噪图像,突出局部异常像素。
(2)本文利用深度残差网络[19]来提取隐写特征,通过引入残差模块有效缓解网络模型训练时反向传播的梯度消失问题,进而解决深度网络难以训练和性能退化的问题。
(3)基于逐像素概率预测来对图像每位像素进行分析,利用标记出隐写像素实际位置的掩码图像进行有监督地学习,增强网络对局部隐写像素的感知能力,无区别对待平滑或者纹理区域的像素,逐一预测图像每位像素是真实位或是隐写位的概率。
(4)从目标函数角度解决正负样本的不均衡问题,训练时通过使用Focal loss[20]对比使用交叉熵损失提升对负样本的学习权重,在测试时用于提升检测精度。
1 相关工作
1.1 预处理层
嵌入的隐写信息对于图像就像是在图像上叠加了微弱的噪声,但这个噪声改变了图像像素之间存在的相关性。这些噪声信号相对载体图像的内容极其微弱,人眼视觉无法分辨,通常网络中采用预处理层计算图像的残噪图像,排除图像内容对隐写信号的干扰。对于载体图像X,像素位xij的空间坐标为(i,j),其对应的残差图像R中的像素为rij,rij的计算如公式(1):

N(xij)表示像素xij相邻像素的集合,Pre(⋅)函数根据相邻像素集合得到像素的预测值,其对应的残差图像的像素值rij,可根据真实像素值与预测像素值的差值得到。
实际计算中,图像X的残噪图像R,由图像X经预设的滤波K处理后得到,其中*表示卷积操作,如公式(2)所示:

传统隐写分析研究中有大量可选的滤波器,其中包括线性和非线性的滤波器,不同的卷积核能够计算出不同的残噪图像。本文中利用富模型SRM中的30个线性的高通滤波器初始化第一层卷积核的参数,这30个滤波器中包含:8个“1st”类、4个“2nd”类、8个“3rd”类、1个“Square3×3”、4个“Edge3×3”、1个“Square5×5”、4个“Edge5×5”。用这30个滤波器的参数初始化5×5卷积核的参数取代随机产生的参数,提取出图像的残噪图像。
1.2 残差模块
在卷积神经网络中,网络结构越深非线性表达能力越好,但当模型效果趋于饱和时,加深网络不再发挥优势,甚至出现退化问题。研究学者提出残差网络解决这一问题,残差网络相比卷积神经网络,通过在网络中引入残差模块,该模块在不同层之间加入捷径连接得以实现。例如第l层的特征图xl添加一条跳转连接(shortcut),跳转连接至第l+1层,两个紧邻层之间的残差模块求取的映射表示如公式(3)所示:

xl+1表示第l+1层的预测值,xl表示输入,F(x,{wl})表示残差映射。残差学习单元由残差学习分支和输入的恒等映射分支组成。残差模块结构如图1所示。残差模块的加入有效地缓解了网络模型训练时反向传播的梯度消失问题,进而解决了深度网络难以训练和性能退化的问题。
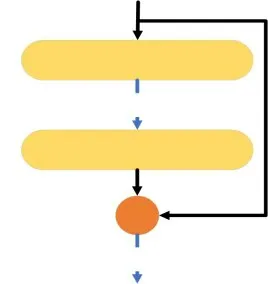
图1 残差模块Fig.1 Residual module
在PSL_NET中,利用深度残差网络来提取隐写特征,通道加深网络来学习更为抽象、高级的特征,利用残差模块的跳转连接汇集上下层特征,增强模型的非线性表达能力。
1.3 概率预测
在判断图像x是否经过隐写的被动隐写分析任务中,网络的末端压缩得到二维特征经激活函数Softmax处理得到的二维概率,分别代表图像是真实图像和隐写图像的概率,概率表达式如公式(4),公式中y表示图像x的预测值,可以等于0或者1,分别表示预测出图像x是真实图像和隐写图像,P(y)表示预测概率值;ŷ表示图像x的实际值,可以等于0或者1,0表示真实图像,1表示隐写图像。

求取概率的极大似然估计如公式(5)所示,通过最大化极大似然估计得到预测概率的最大值,表达式的最大值只需求解表达式负值的最小值得到,即最小化交叉熵损失,损失函数如公式(6)所示:
在本文中,逐一预测图像x每位像素xij是真实和经隐写的概率,预测概率的表达式如公式(7)所示,公式中yij表示像素xij的预测值,可以等于0或者1,分别表示预测出像素xij是真实像素或者隐写像素,P(yij)表示预测概率值;yij表示像素xij的实际值,可以等于0或者1,0表示真实像素,1表示隐写像素。

像素预测概率的极大似然估计如公式(8)所示,同样通过最大化极大似然估计得到预测概率的最大值,即通过最小化求取的交叉熵损失,图像x每位像素的预测损失的平均值如公式(9)所示,其中h、w分别表示图像x的高度和宽度:
本文的定位网络中在训练时,输入端输入一张载体图像、隐写图像,让网络学习隐写像素对隐写前后局部统计特性的改变来判定图像的真实像素和隐写像素,而载体图像中像素位均为正样本,隐写图像中的经隐写像素为负样本,未经隐写位同样为正样本,这使得正负样本出现不均衡问题,因此样本不均衡问题也是本文研究的内容,学术界中有通过自定义优化的目标函数来解决这一问题,本文的任务重点学习负样本特征,文献[20]中的Focal loss用于提升困难样本的权重,本文的实验中同时使用Focal loss对比交叉熵损失,提升网络对负样本的学习,Focal loss如公式(10)所示,公式中γ为调节系数,通过调节参数γ调节正负样本的比例,γ大于1时,网络中负样本的学习权重增加。
2 网络结构
本文提出隐写定位网络PSL_NET,网络模型如图2所示。网络由预处理层、深度残差层、像素预测层组成。预处理层中,采用SRM高通滤波器提取出包含多阶隐写信号的残噪图像;深度残差层中,利用残差结构的跳转连接汇集上下层的特征得到组合的特征,增强模型的特征表达能力;像素预测层中,利用标记出隐写像素实际位置的掩码图像进行有监督地学习,加强网络对局部隐写像素的感知能力,无区别对待平滑和纹理区域的像素,逐一预测图像每位像素位是真实像素或是隐写像素的概率。
2.1 预处理层
预处理层用于提取图像的残噪图像,本文中利用富模型SRM中的30个SRM高通滤波器初始化网络的第一层卷积核的参数,并伴随网络自动化学习,第一层卷积核大小为5×5,padding设置为2,对于1×256×256大小的载体图像,提取的残噪图像大小保持不变,预处理层的高通滤波器充分抑制图像的内容,捕获出水平、垂直、不同对角线的领域像素的残噪信息,提取出包含多阶隐写信号的残噪图像,残噪图像中凸出局部范围的异常像素。
2.2 深度残差层
经预处理层提取的残噪图像,以残差网络为主进行隐写特征的提取,利用残差网络保证加深网络时非线性表达能力更好,同时避免随着网络的加深而出现退化的问题,残差模块中采用3×3卷积对领域范围内的隐写特征进行建模。
本文的深度残差层中包含13个Group,如图2中所示,Group1~Group2采用30×3×3大小的卷积核,其中padding等于1,在卷积核之后添加批处理BN层,将分布拉到对梯度更为敏感的正太分布,而Group3~Group13中均采用残差模块,每个Group采用两次30×3×3卷积层和BN层进行隐写特征的提取,深度残差层中利用残差结构的跳转连接汇集上下层的特征得到组合的特征,增强模型的特征表达能力,不同Group之间采用ReLU非线性变换增强模型特征的非线性表达能力。经Group1~Group13特征提取后的特征图大小均为30×256×256。
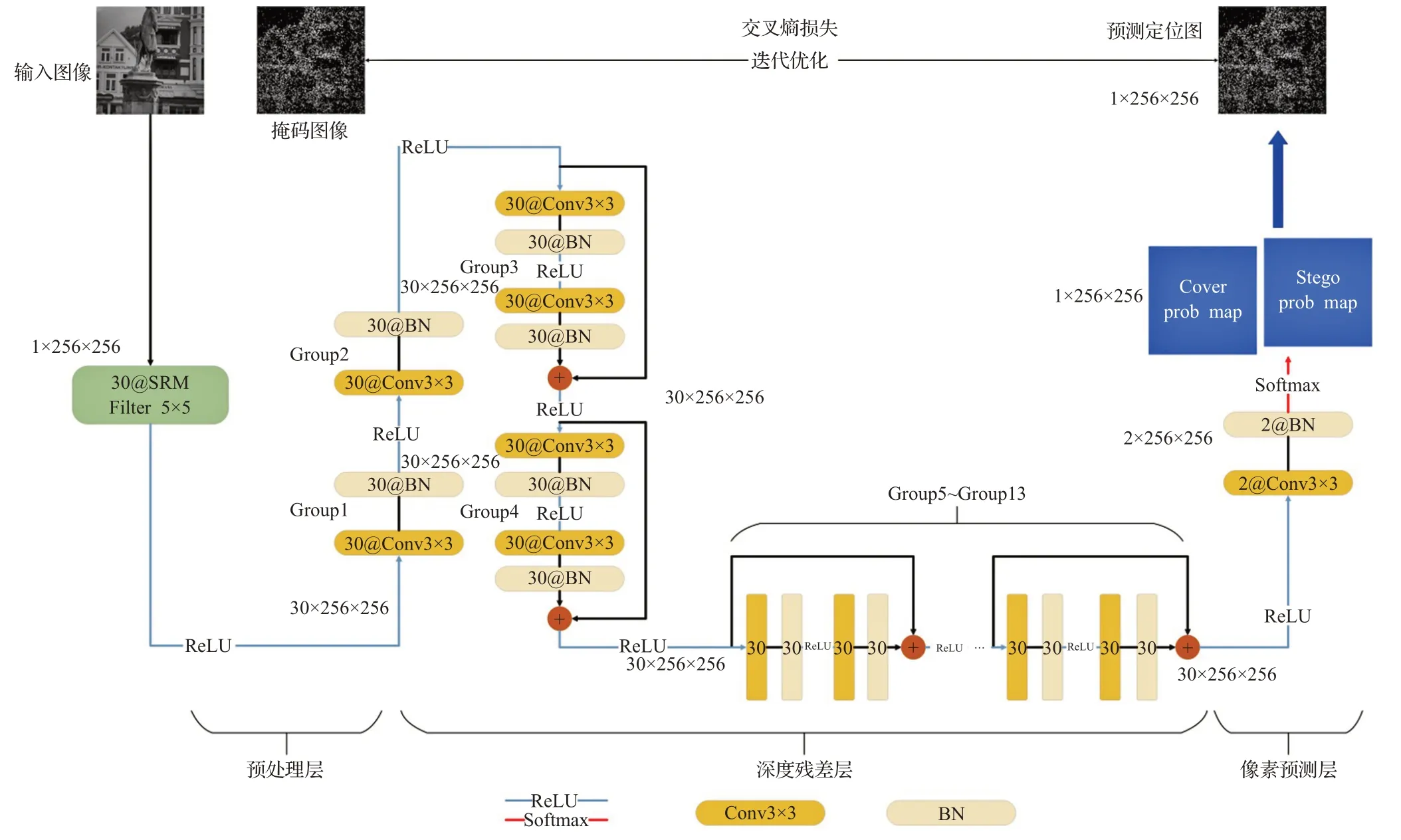
图2 PSL_NET网络结构Fig.2 PSL_NET network structure
2.3 像素预测层
本文主要利用标记出隐写像素实际位置的掩码图像进行有监督地学习,为网络提供更多学习的信息,输入端每张图像都附带一张掩码图像(Mask),掩码图像Mask的获取策略如公式(11)所示,其中载体图像IC经某种隐写算法嵌入后的隐写图像IS,像素位置(i,j)一旦嵌入,嵌入前后像素差值的绝对值大于0,则掩码图像Mask中对应的像素位标记为1,若未嵌入,像素差值的绝对值为0,则掩码图像Mask中对应的像素位标记为0,掩码图像反映了隐写像素的实际分布。网络包括检测内容自适应隐写算法和非自适应隐写算法LSB matching顺序嵌入的图像,经内容自适应隐写算法S-UNIWARD和经非内容自适应隐写算法LSB matching顺序嵌入后的隐写图像和掩码图像可视后如图3所示,掩码图像中标记为1的像素值用灰度值255进行显示。
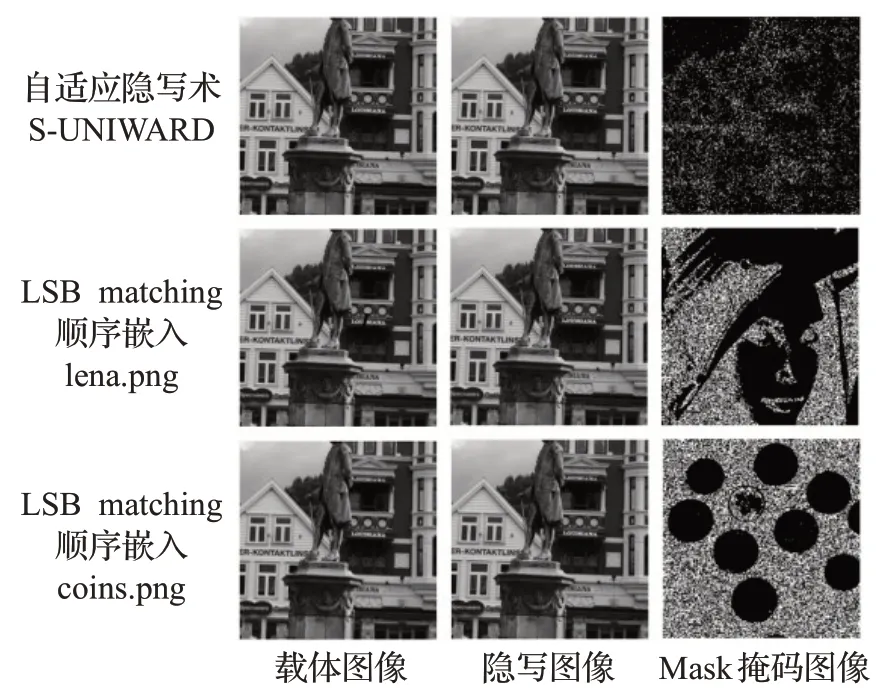
图3 载体图像、隐写图像和对应的掩码图像Fig.3 Origin image,steganographic image and corresponding mask image

像素预测层的流程如图4所示。利用像素预测层对经深度建模得到多维高级特征进行降维压缩得到二维通道的特征图,压缩得到的二维高级特征易于侦查局部异常像素;像素预测层中采用2×3×3卷积层和BN层处理得到二维通道特征,经过Softmax激活函数得到2×256×256的概率图,“0”“1”通道分别代表预测是未经隐写的概率分布图P0和预测是经过隐写的概率分布图P1,大小均为1×256×256。输入端检测图像x的每位像素xij经网络预测得到二维概率,P0ij和P1ij,分别代表像素xij未经改动或者经过隐写的概率,取二维概率的最大值所在的通道编号“0”或者“1”为预测的隐写定位图y中对应像素位yij的值。训练过程有监督进行,网络通过最小化交叉熵损失反复迭代优化直至隐写定位图无限逼近掩码图像,网络采用的损失函数如公式(9)所示。
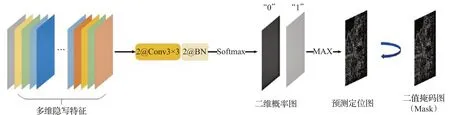
图4 像素预测层的流程Fig.4 Process of pixel prediction layer
在训练训练时包含未经改动载体图像和经隐写的图像,而在载体图像中全部为标记为0的像素,而隐写图像中同样包含标记为0的像素,这使得训练过程中出现正负样本不均衡的问题,且本文研究的是隐写像素的定位问题,隐写像素作为负样本是重点学习的内容,因此解决样本不均衡问题也是本文的研究内容。在研究界中不少学者通过自定义的目标函数解决样本不均衡的问题。本文在实验中分别利用Focal loss和交叉熵损失,通过对比像素检测准确度和负样本的准确度来选择最佳的目标函数,Focal loss如公式(10)所示。
网络包含检测内容自适应隐写算法嵌入的图像。内容自适应隐写术的策略,是对视觉掩蔽效果较好纹理复杂的区域进行嵌入,从而尽可能地减小图像质量的损失,减少嵌密引发的异常,根据该原则定位网络按理应对有限区域进行分析,比如一些纹理区域应具备更高经过隐写的可能性,而本文网络的核心是利用实际标注的隐写位加强网络对局部异常像素的感知能力,局部领域像素内的隐写信号对隐写前后统计特征无规则的改变,是有利于侦破的关键,所以本文的网络对内容自适应隐写算法的像素定位,不针对像素是否位于平滑或者纹理区域。
同时对非内容自适应隐写术LSB matching进行像素定位,非自适应隐写术LSB matching是直接对图像像素值的最低有效位进行±1,该算法对嵌入的区域进行选择时,不针对纹理区域与平滑区域。本文对该算法进行检测时,同样利用有监督学习加强网络对局部异常像素的感知能力,定位网络无区别对待平滑或者纹理区域的像素,使得网络适用于检测非内容自适应隐写术LSB matching。
定位网络对于隐写图像进行检测的前提是预处理层中利用高通滤波器对图像的残留噪声的提取,高通滤波器一般用于图像纹理区域的提取,而在隐写分析或是图像取证中,更多是捕获嵌入信息对局部相关性改变的痕迹,因此同样适用于凸显图像平滑区域嵌入的噪声信息;同时利用深度残差层加深了网络对局部异常像素的感知能力,而网络的关键是有监督方式对嵌入前后异同的学习,掩码图像标记的实际隐写像素为网络提供了更多信息进行学习,使网络可以迁移至不同嵌入策略的图像进行检测,但同样为内存负载带来一定的开销且该策略也具备目前基于深度学习的隐写分析研究的缺陷,综述性文章[21]中提到的载体失配问题,大数据时代,数据多源异构,静态的训练集始终难以覆盖动态的检测对象,一些学者的观点是不同源数据需分开训练后再进行检测,或者通过增加训练集中的数据来源和样本数量来缓减该问题。
3 实验
3.1 数据集和实验环境
3.1.1 数据集
本文使用隐写分析标准数据集BOSSbase v1.01进行评估,该数据集由10 000张512×512的PGM格式的灰度图构成,考虑到GPU计算限制,以图像纹理区域为中心的方式裁剪图像尺寸为256×256,构造出10 000张大小的数据源;采用自适应隐写算法S-UNIWARD,实验中验证网络在不同负载下的隐写定位能力,每组训练集中包含8 000张载体图像(cover)、隐写图像(stego),测试集中包含2 000张载体图像、隐写图像;训练过程有监督进行,数据集中每张图像附带一张二值掩码图像,掩码图像中真实像素位标记为0,隐写像素位标记为1。
同时利用经非内容自适应隐写算法LSB matching顺序嵌入后的图像构造出测试数据集。用Matlab库中lena.png、coins.png、kobi.png三张嵌入图像,分别对2 000张测试图像进行嵌入,共同组成LSB隐写算法的3组测试集,每组测试集中包含2 000张隐写图像,数据集中每张图像附带一张二值掩码图像(Mask)。
3.1.2 实验环境
实验的硬件环境是型号为tesla p40的GPU,网络模型使用深度学习框架Pytorch实现,CUDA版本为10.1;优化器采用Adam,学习率设置为0.000 1,batch_size设置为2,其中包含1对载体图像、隐写图像,周期epoch设置为50,1个周期迭代8 000次,模型的训练参数总计197 886。
3.1.3 评估标准
定位能力取决于能够准确检测隐写图像中的隐写像素,同时取决于不对未经隐写的像素造成误报,根据用于描述图像像素真实分布的掩码图像和网络模型预测出隐写像素定位图,采用像素检测准确度(pixel accuracy,PA)对PSL_NET的隐写定位性能进行表征,像素准确度的计算如公式(12)所示:

此外,定位网络重要的功能是验证隐写像素的检测能力,因此同时采用特异度(FPR)作为评价的指标,特异度的计算公式如公式(13)所示:

TP表示掩码中标记是0,预测值也是0的像素样本量;TN表示掩码中标记是1,预测值也是1的像素样本量;FN表示掩码中标记是0,预测值是1的像素样本量;FP表示掩码中标记是1,预测值是0的像素样本量。
3.2 实验结果与分析
3.2.1 PSL_NET在不同负载下的隐写定位验证
为了对网络PSL_NET的隐写定位进行验证,首先采用自适应隐写算法S-UNIWARD在嵌入负载为0.1 BPP、0.2 BPP、0.3 BPP、0.4 BPP对网络的隐写像素定位能力进行验证,单位BPP表示平均每位像素嵌入的比特数,训练过程中采用交叉熵损失作为目标函数。PSL_NET在完成嵌入负载为0.4 BPP任务时,训练过程中在测试样本上的损失下降过程如图5所示,每组测试样本中包含2 000张载体图像、隐写图像,训练直至收敛时不同负载下的损失(Loss)、像素准确度(PA)以及特异度(FPR)如表1所示。
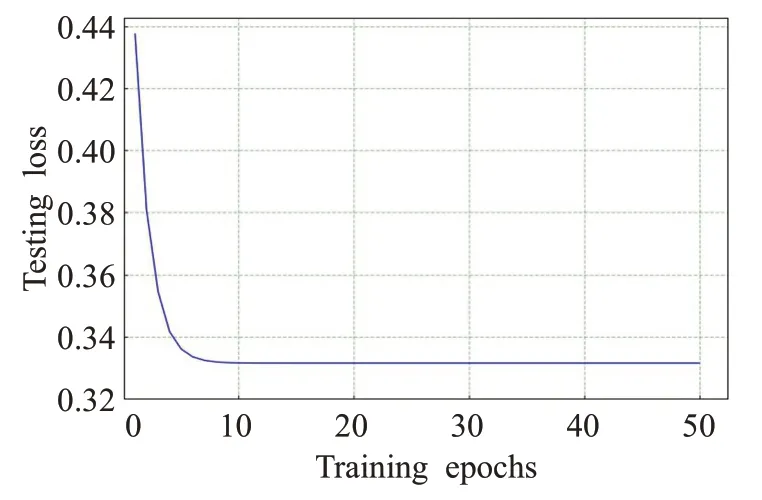
图5 在负载为0.4 BPP的测试样本上的损失下降过程Fig.5 Loss reduction process on test sample at payload of 0.4 BPP
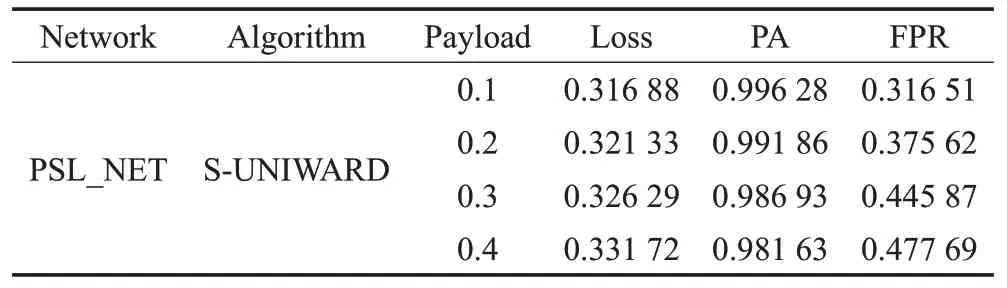
表1 不同负载下的损失、像素准确度(PA)、特异度(FPR)Table 1 Loss,pixel accuracy and specificity under different payloads
实验中,PSL_NET对不同负载下的图像进行检测时,像素检测准确度(PA)有着较高的精度,随机嵌入负载的增加检测准确度降低,在不同负载下的隐写图像检测时的特异度(FPR)存在一定的提升空间,但随着负载增加精度保持稳定;在损失下降过程中,80 000次迭代后损失平缓下降;在检测图像是否经过隐写的研究中,有着嵌入负载越大检测准确度越高的公论,这一目标下的网络是对隐写信号分布的全局进行统计,依赖于全局的隐写区域,负载越大网络的感知能力越强,而在隐写定位任务中嵌入负载越大局部范围内统计特性改变的差异性越大,检测准确度降低,负载越大网络对局部隐密信息越敏感,特异度提升,同时从准确度和特异度的差距可知,网络对隐写像素漏检的几率大于对真实像素造成的误报率,这是训练时正负样本不均衡造成的,本文从目标函数角度解决正负样本的不均衡问题,在测试时用于提升精度。
3.2.2 采用Focal loss训练的隐写定位验证
从目标函数角度解决样本不均衡问题,研究本文网络PSL_NET在使用Focal loss进行训练时,能否解决正负样本的不均衡问题并提升像素检测准确度和特异度。同样针对内容自适应隐写算法S-UNIWARD在负载为0.1 BPP、0.2 BPP、0.3 BPP、0.4 BPP的图像进行训练,训练过程中采用Focal loss为目标函数,调节系数γ设置为2时为最佳,PSL_NET在完成嵌入负载为0.4 BPP任务时,训练过程中在测试样本上的损失下降过程如图6所示,训练直至收敛时对不同负载下测试图像检测时的损失(Loss)、像素准确度(PA)以及特异度(FPR)如表2所示,每组测试样本中包含2 000张载体图像、隐写图像。
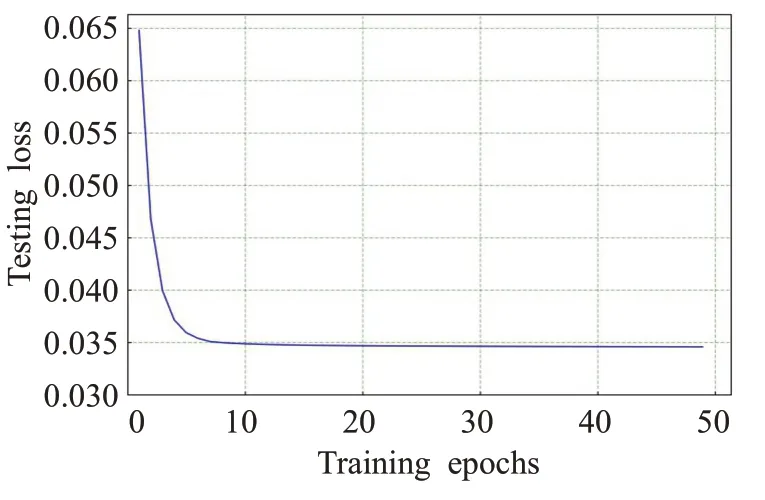
图6 采用Focal loss在负载为0.4 BPP的测试集上的损失下降过程Fig.6 Loss reduction process on test set at payload of 0.4 BPP using Focal loss
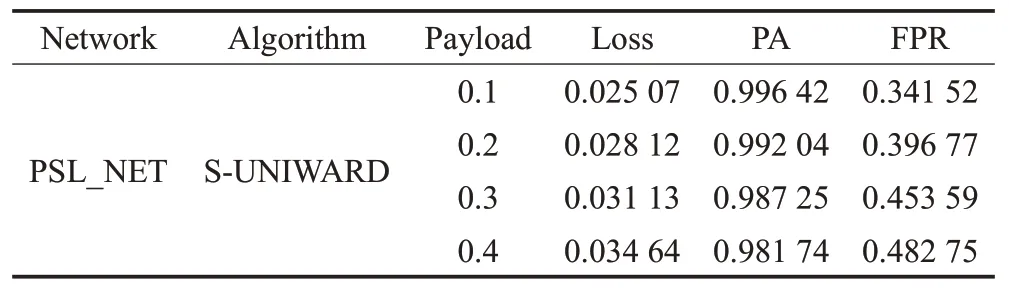
表2 采用Focal loss在测试集上的损失(Loss)、像素准确度(PA)、特异度(FPR)Table 2 Loss,pixel accuracy and specificity using Focal loss on test set
Focal loss中调节系数γ设置为2时,对于正样本而已,像素yij为负样本的概率1-P0ij的γ次方就会变小,这时的损失函数值变得更小,Focal loss中调节系数γ的目的就是减少正样本在训练中的权重,从而使得训练过程网络更专注于负样本的学习。在实验中,PSL_NET对经内容自适应隐写算法S-UNIWARD在不同嵌入负载下的隐写图像使用Focal loss进行训练后,对测试样本进行检测时,相对于使用交叉熵损失训练的网络,像素准确度和特异度均得到一定的提升,负载为0.1 BPP提升尤为明显,由此可见通过改变目标函数提升了网络对于负样本的学习。
3.2.3 对非自适应隐写术LSB matching的隐写定位验证
内容自适应隐写术是对图像中视觉掩蔽效果较好纹理复杂的区域进行嵌入,从而尽可能地减小图像质量的损失,减少嵌密引发的异常。非自适应隐写术LSB matching是直接对图像像素的最低有效位进行±1,对嵌入的区域进行选择时,不针对载体图像的纹理区域与平滑区域,在实验中利用针对内容自适应隐写算法S-UNIWARD在负载为0.4 BPP的隐写图像采用交叉熵损失已训练至收敛的网络,对经过非内容自适应LSB matching隐写算法分别顺序嵌入Matlab库中lena.png、coins.png、kobi.png三张图像组成的3组测试数据集进行检测,每组测试数据集中包含2 000张载体图像、隐写图像,像素准确度(PA)如表3所示。

表3 对LSB Matching隐写术的像素准确度(PA)Table 3 Pixel accuracy for LSB matching
实验可知,针对自适应隐写算法S-UNIWARD在负载为0.4 BPP的隐写图像以训练至收敛的网络PSL_NET,迁移至检测非内容自适应隐写算法LSB经顺序嵌入3张不同图像的测试集时算法仍然有效,LSB matching的嵌入策略不针对载体图像内容进行嵌入,本文的网络对隐写像素进行检测时,无区别对待平滑或者纹理区域的像素,通过对标记数据的学习增强网络对局部领域像素内异常隐写信号的敏感度,使得网络亦可适用于非内容自适应LSB隐写算法的隐写像素,但由于顺序嵌入图像后使载体图像承受了更大的嵌入负载,检测难度较大使得准确度下降。
3.2.4 对PSL_NET的对比仿真分析
对本文提出的PSL_NET与文献[16]中提出的针对LSB matching隐写术有效嵌入负载像素定位的深度神经网络(简称DNN)获取图像隐密信息的效果进行对比仿真和分析,两种方法针对内容自适应隐写术S-UNIWARD在负载为0.4 BPP的隐写图像进行训练和测试,在测试集上的像素准确度和特异度如表4所示,测试集中包含2 000张载体图像、隐写图像。以及分别用两种方法完成内容自适应隐写术S-UNIWARD在负载为0.4 BPP任务已训练至收敛的网络对载体图像、经内容自适应隐写术S-UNIWARD在负载为0.4 BPP嵌入后的隐写图像进行检测,以BOSSbase v1.01中第1 108张图像作为样张对两种方法生成的隐写定位图像的效果进行可视化对比,该样张中纹理和平滑区域的分布直观。如图7所示,输入端为载体图像、经内容自适应隐写算法S-UNIWARD在负载为0.4 BPP处理后的隐写图像,掩码图像为预先标注出隐写像素位置的图像,隐写定位图分别经PSL_NET、DNN预测得到,可视时将DNN获取的标签(label)转换成定位图对两种方法的效果进行对比。

表4 两种方法在测试集上的像素准确度(PA)和特异度(FPR)Table 4 Pixel accuracy and specificity of two methods on test set
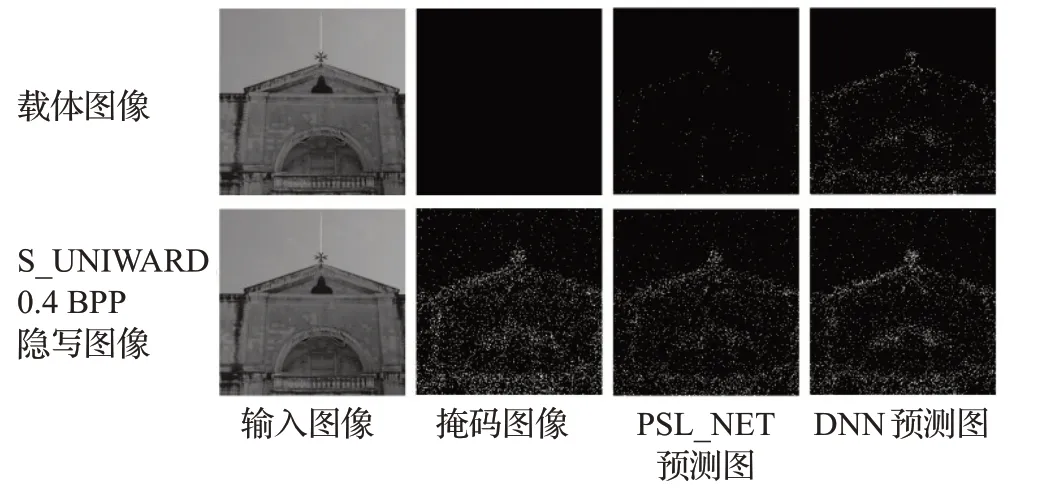
图7 两种方法获取的隐写定位图Fig.7 Steganographic location map obtained by two methods
DNN中通过提取隐写图像中每位像素的临近像素差异矩阵构造出的72维特征向量作为输入进行训练,在预测像素时将纹理区域的像素视为无效隐写像素,因为临近像素差异矩阵本质用于提取图像纹理区域的信息,然而内容自适应隐写术是对图像中视觉掩蔽效果较好纹理复杂的区域进行嵌入,如若无视掉纹理区域的像素,该方法便对内容自适应隐写术的隐写定位无效,因此本文的对比仿真中采用该方法时将纹理区域的像素视为有效像素。如表4中,两种方法对测试集中的数据进行检测时,特异度相当然而像素检测准确度相差明显,因为DNN通过手工提取临近像素差异特征的均方作为输入,该特征对图像纹理区域的像素敏感,而测试集中载体图像与隐写图像占比为1∶1,该方法检测载体图像时,载体图像中纹理区域的像素并未经嵌入却被误报,导致准确度降低。
如图7所示,测试样张中上方为平滑区域,下方为纹理区域,输入端载体图像经PSL_NET、DNN预测得到的隐写定位图中,DNN方法对载体图像的纹理区域敏感,标识出了载体图像中未经隐写的像素,而PSL_NET中仅极少量未经隐写的像素被标识,两种方法对内容自适应隐写术S-UNIWARD负载为0.4 BPP的隐写图像的隐秘信息定位时,对比样张的上方可知两种方法都可捕获部分图像平滑区域的隐写信息,DNN基于手工提取的特征对平滑区域的隐秘信息提取更为准确,样张的隐写定位图的下方区域中,两种方法均能捕获图像纹理区域的隐写信息,但PSL_NET中仅有少量未经隐写的信息被错误地标识。对内容自适应隐写术的隐写分析研究中,在特征选取时既要保证可以捕获出纹理复杂区域的隐秘信息,同时保证不对纹理复杂区域中未经隐写的像素造成误报,本文中利用卷积神经网络(CNN)自动学习抽象的隐写特征的特点,使得网络能够区分出纹理复杂区域中嵌入的隐秘信息,PSL_NET可捕获平滑区域的隐秘信息亦可证得该方法适用于LSB matching隐写术的隐写像素定位。对比仿真可知,本文的方法相对DNN的优势在于对未经隐写的像素有更低的误报率并且完全端到端实现。
4 结束语
本文针对目前隐写分析往往只能判别载体图像中是否存在隐密信息,并不能对隐密信息的具体位置进行标识,为进一步增强隐写分析的实用性,将隐写分析的研究目标拓展为自适应隐写术和非自适应隐写术LSB matching的隐写定位。提出一种端到端的图像隐写分析定位网络PSL_NET,在输入端输入一张图像,输出端得到预测的隐写定位图。在预处理层中,利用空域富模型的高通滤波器提取残噪图像;在深度残差层中,通过深度残差学习增强隐写特征的表达能力;像素预测层中,利用标记出隐写像素实际位置的掩码图像进行有监督地学习,加强网络对局部隐写像素的感知能力,无区别对待平滑或者纹理区域的像素,逐一预测图像每位像素是真实位或是隐写位的概率。最后,从目标函数层面解决正负样本的不均衡问题,训练时通过使用Focal loss对比使用交叉熵损失提高对负样本的学习权重,在测试时用于提升检测精度。
在基于隐写分析标准数据源BOSSbase v1.01的实验中,网络对自适应隐写算法S-UNIWARD在负载为0.1 BPP、0.2 BPP、0.3 BPP、0.4 BPP下的像素检测准确度均大于0.98,特异度还有一定的提升空间,但是网络一旦检测出隐写图像的部分隐写像素就完成了被动隐写分析的任务,即能判断图像是否经过隐写。本文为解决正负样本不均衡问题,从目标函数角度提出解决方法,并用实验验证了该方法对于精度的提升起到的效用,最后通过与相关研究的对比仿真的可视对比中,验证网络同时适用于非内容自适应隐写术LSB matching的隐写信息定位。
本文网络的关键是有监督方式利用掩码图像对嵌入前后异同的学习,使网络可以迁移至检测经非内容自适应隐写术LSB matching嵌入的图像,掩码图像的利用是有监督学习局部隐写像素对于隐写前后统计特性改变的关键,本文的主要工作是为隐写分析定位问题提供一种策略,在图像分割领域亦有相似策略,掩码图像为网络提供了更多学习信息的同时,给内存负载带来了一定的开销,且隐写定位研究中仍然存在基于深度学习的被动隐写分析研究中存在的载体失配问题,因为静态的训练集中的数据始终不能覆盖所有的数据源,一些学者的观点是不同源数据需分开训练后再进行检测,或者通过增加训练集中的数据源和数量来缓减该问题,且本文的研究距离真正准确有效地定位出任意图像的隐写像素还有一定差距,未来的工作中将进一步研究以提升检测精度和增强实用性。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
计算机技术与发展(2022年5期)2022-05-30
网络安全与数据管理(2022年3期)2022-05-23
密码学报(2021年2期)2021-05-15
北京航空航天大学学报(2020年10期)2020-11-14
软件(2020年3期)2020-04-20
网络安全和信息化(2019年7期)2019-12-22
北京航空航天大学学报(2019年9期)2019-10-26
摄影之友(影像视觉)(2018年12期)2019-01-28
Coco薇(2017年8期)2017-08-03