
基于自适应位置调节的粒子群MPPT控制方法
2022-06-20 08:24游国栋李兴韫侯晓鑫赵双乐
天津科技大学学报 2022年3期
游国栋,李兴韫,马 元,徐 滨,侯晓鑫,赵双乐
(天津科技大学电子信息与自动化学院,天津 300222)
太阳能具有安全、环保、资源充足等优点,是一种清洁能源[1].光伏发电是太阳能利用的一种主要形式.随着光伏发电技术的日益成熟,对发电效率的要求也愈发提高,其中,最大功率点是表征发电效率的一个关键指标.然而,在光伏阵列受到不均匀光照时,光伏系统会陷入局部最优状态,严重影响光伏系统对最大功率点追踪(maximum power point tracking,MPPT)的效率,因此,对最大功率点的追踪变得尤为重要.
最大功率点追踪的传统方法包括扰动观测法、电导增量法、模糊控制法等.文献[2]采用直接占空比技术,提出一种变步长扰动观测法,有利于增强光伏系统的稳态性能,但该方法只在传统升压变换器中进行验证;文献[3]使用自适应占空比,提出一种改进的电导增量法,在追踪最大功率点时响应速度快,但运算过程比较复杂;文献[4]结合模糊控制和粒子群算法,提出一种模糊自适应粒子群算法,提高了最大功率点追踪精度;文献[5]通过引入加速度系数,提出一种改进惯性权重的混沌粒子群算法,降低了在最大功率点附近的振荡.
本文提出一种基于自适应位置调节的粒子群MPPT控制方法.首先,运用Tent映射产生混沌序列,对粒子位置进行更新.然后,赋予粒子反捕食的能力,根据捕食者与粒子之间的距离更新粒子位置;通过改变惯性权重取值,控制粒子的飞行速度,进而控制粒子的搜索能力.最后,给速度添加一个极小的增量扰动,避免出现光伏系统陷入局部最优的情况,当每一代的全局最优解相同时,该算法停止,输出结果.通过MATLAB仿真,对该算法进行验证,并与传统粒子群算法结果进行对比.
1 光伏电池模型
1.1 光伏电池模型及特性
光伏电池是太阳光照射半导体P-N结产生光生伏特效应,将光能转化为电能的一种装置.由于单个的光伏电池输出电压比较低,在进行光伏发电时采用光伏阵列的形式,将多个光伏电池通过串并联的形式组成光伏阵列[6].光伏电池的等效电路如图1所示.

图1 光伏电池等效电路 Fig.1 Equivalent circuit of photovoltaic cell
电压电流数学表达模型为
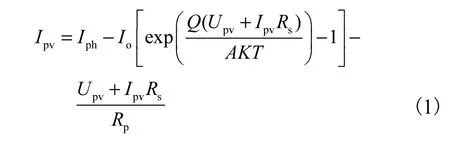
式中:Io为光伏电池内部等效二极管的P-N结反向饱和电流,近似为常数;Iph为光伏电池的光生电流;Ipv、Upv分别为光伏电池的输出电流、输出电压;Rp、Rs分别为并联、串联电阻;Q为电子电荷,Q=1.6×10-19C;K为玻尔兹曼常数;T为光伏电池所处环境的热力学温度;A为光伏电池内部P-N结的曲线常数.
1.2 不均匀光照情况下光伏电池输出特性
当光伏阵列受到均匀光照时,其输出特性曲线中只有一个峰值点.但是,在实际应用过程中,光伏阵列受外界环境(如温度、辐射照度、云层遮挡等)影响较大,导致光伏阵列的输出特性曲线有多个峰值点;在采用控制方法进行最大功率点追踪时,容易将局部最优误判为全局最优,使系统出现陷入局部最优的情况,降低了发电效率[7-8].光伏阵列在接受均匀光照和不均匀光照情况下的输出特性曲线如图2所示.

图2 光照情况下光伏系统输出特性 Fig.2 Output characteristics of photovoltaic system under illumination
2 粒子群算法及改进算法
2.1 粒子群算法
粒子群算法来自鸟群的启发,将鸟群中的每一只鸟看作是一个“粒子”,鸟群在寻找食物时,相互交流,传递信息[9].在鸟群寻找食物时,会有捕食者进行干扰、捕杀,严重影响粒子群的完整性和寻找食物的范围,因此,粒子群应当有逃避捕食者的能力[10].当有粒子发现食物时,将会传递信息,使附近的其他粒子向食物靠近.从起初无序的寻找到最后有目的的觅食,该过程可以看作是一个寻优的过程.粒子群算法中两个重要的变量是个体最优解(pbest)和全体最优解(gbest).粒子速度vt+1和位置xt+1更新如式(2)、式(3)所示.

式中:t为粒子更新迭代的次数,vt、vt+1分别为粒子在t-1代、t代时的速度,xt、xt+1分别为粒子在t-1代、t代时的位置,ω为惯性权重,c1、c2分别为加速因子,r1、r2分别为[0,1]内的随机数.
2.2 自适应位置调节的粒子群算法
2.2.1 Tent映射
初始化是粒子群算法的第一步,初始化运用得当,可以提高算法的收敛性[11].本文采用Tent映射对粒子群进行初始化,Tent映射表达式为

随机产生[0,1]内的初值记为y0,代入式(4)进行迭代,当达到最大迭代次数时,程序运行停止,产生随机序列.
2.2.2 改进的粒子群算法
为了增强粒子群算法的收敛性能和搜索能力,同时保证粒子的完整性,本文对传统粒子群算法进行改进.设置粒子的搜索空间为D维,共有N个粒子,可将第i(i=1,2,3,…,N)个粒子在第t代第d(d=1,2,3,…,D)维表示为此处以2维为例,设捕食者位置为(m1,n1),粒子位置为(m2,n2),根据粒子与捕食者的相对距离对粒子位置进行更新,相对距离计算公式为

式中:α为(0,1]中的随机数,Q为一个标准正态分布随机数,M为最大迭代次数,R为报警值.
粒子状态如图3所示.

图3 粒子状态图 Fig.3 Particle state diagram

在各个粒子前往聚类中心时,增加惯性权重的取值,提高粒子对局部最优的搜索能力;在各个聚类中心前往全局最优解时,减小惯性权重的取值,提高聚类中心对全局最优解的搜索能力[13].选择适应度最大的聚类中心作为全局最优解,为了避免粒子群出现陷入局部最优的困境,此时给予速度一个小的扰动,观察适应度best( )fg 是否变化,然后多次迭代进行验证.
2.2.3 自适应位置调节的粒子群算法基本流程
(1)设置粒子种群规模N、惯性权重ω、加速因子c1和c2、最大迭代次数M,随机产生一个y0作为第一个粒子,根据式(4)进行迭代,产生N-1个粒子,初始化速度.
(2)根据粒子和捕食者之间的安全距离,更新各个粒子的位置和速度.
(3)评价各个粒子的适应度,将各个粒子的位置和适应度存储在pbest中,将所有pbest中适应度最优的位置和适应度存储在gbest中.
(4)根据适应度,选择聚类中心,将粒子分为若干个粒子群,并更新惯性权重取值.
(5)对于各个聚类中心,与其前一个最优位置相比较,如果较好,则作为当前的最优位置;比较当前所有的pbest和上一次迭代的gbest,更新gbest.
(6)对此时全局最优解施加一个速度扰动,观察适应度f(gbest)是否变化,并进行多次迭代验证.
(7)若达到精度要求或迭代次数,搜索停止,输出结果,否则返回(3).
3 仿真分析
为了验证自适应位置调节的粒子群算法的优化性能,现选取6种具有不同特点的基准函数进行比较测试,结果见表1.对f1、f2、f3、f4均采用30维进行测试,对f5、f6分别采用2维和4维进行测试.参数设置为:粒子种群规模N=50;惯性权重增加时ω=0.8,减小时ω=0.4;加速因子c1=2、c2=2,最大迭代次数M=500,粒子速度范围为[-40,40].粒子群算法(PSO)、麻雀算法(SSA)与自适应位置调节的粒子群算法(APSO)的仿真结果如图4所示.通过对比仿真结果可知,在不同维数、不同测试函数下,本文所提出的方法具有更好的收敛精度且收敛稳定性较好.

图4 3种算法的仿真结果 Fig.4 Simulation results of three algorithms
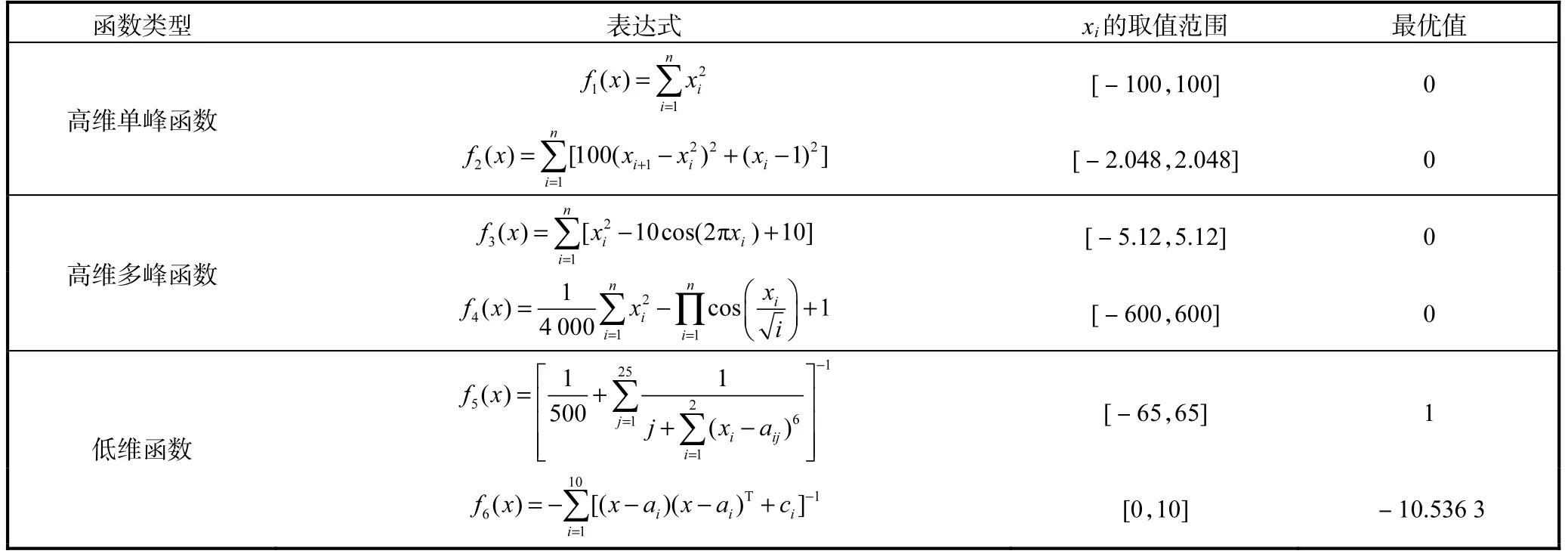
表1 6种基准函数 Tab.1 Six base functions
以光伏阵列输出电压为参考电压,将所有粒子的位置xi作为光伏阵列输出电压Ui,飞行速度vi作为对参考电压的扰动,粒子群的反捕食能力作为光伏系统的抗干扰能力,对提出的方法在MATLAB软件平台上进行仿真测试,建立的MPPT仿真模型如图5所示[14].仿真模型由光伏阵列、BOOST升压电路、MPPT控制器以及负载模块组成[15].设置温度为25℃,辐射照度为1000W/m2,BOOST拓扑的DC-DC电路的频率为10kHz,MPPT控制器采用基于ATmega16的MPPT控制系统,MPPT控制器控制周期为0.5ms、C1=470μF、C2=220μF、L=2mH.
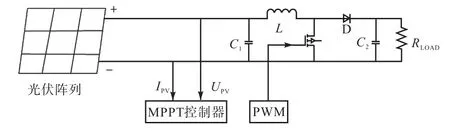
图5 MPPT仿真模型 Fig.5 MPPT simulation model
现将3×3的光伏阵列分别进行不同辐射照度处理,第一列辐射照度为600W/m2,第二列辐射照度为800W/m2,第三列辐射照度为1000W/m2.在传统粒子群算法和自适应位置调节的粒子群算法下,光伏系统输出功率仿真结果如图6所示.

图6 不同算法下光伏系统输出功率图 Fig.6 Output power diagram of photovoltaic system under different algorithms
由图6(a)可知:采用传统粒子群算法在辐射照度为600W/m2时,0.13s后光伏系统进入稳定状态,输出功率为80W;在辐射照度为800W/m2时,0.32s后光伏系统进入稳定状态,输出功率为110W;在辐射照度为1000W/m2时,0.52s后光伏系统进入稳定状态,输出功率为150W.由图6(b)可知:采用自适应位置调节的粒子群算法在辐射照度为600W/m2时,0.08s后光伏系统进入稳定状态,输出功率为100W,与传统粒子群算法相比,输出功率增加20W,效率提高25%;在辐射照度为800W/m2时,0.25s后光伏系统进入稳定状态,输出功率为150W,与传统粒子群算法相比,输出功率增加40W,效率提高36%;在辐射照度为1000W/m2时,0.44s后光伏系统进入稳定状态,输出功率为180W,与传统粒子群算法相比,输出功率增加30W,效率提高20%.
综上所述,当光伏系统输出波形逐渐达到稳定时,采用传统粒子群算法输出波形畸变程度较大,振荡幅度较大;当光伏系统输出波形趋于稳定时,采用自适应位置调节的粒子群算法用时较短,稳态性能更好;光伏系统在不同的辐射照度下,采用自适应位置调节的粒子群算法输出功率均高于传统粒子群算法,在辐射照度发生突变时,光伏系统采用该算法输出功率变化幅度较小.
4 结 论
针对光伏系统多峰值特性,本文提出了一种自适应位置调节的粒子群算法,并通过仿真进行验证.结果表明:运用Tent映射产生粒子群序列,可提高算法的遍历性,降低光伏系统在最大功率点处的振荡;该算法赋予粒子反捕食的能力,可检测出外界环境对光伏系统的干扰,防止输出电压失真;该算法对粒子速度添加一个较小的增量扰动,用于判断粒子群是否获得全局最优解,避免光伏系统陷入局部最优状态.该算法无须选择变量的最优取值,可以更加快速地实时追踪最大功率点,在最大功率点附近振荡较小,提高了光伏系统的发电效率.
猜你喜欢
计算机仿真(2022年8期)2022-09-28
科学与生活(2021年14期)2021-09-10
当代旅游(2016年10期)2017-04-17
科技视界(2016年18期)2016-11-03
现代电子技术(2015年17期)2015-09-23
财经理论与实践(2015年2期)2015-04-16
