
In-situ polymerization for mechanical strong composite actuators based on anisotropic wood and thermoresponsive polymer
2022-06-20 08:00LinChenXinshuoWeiFengWngShojuJinWeisenYngChunxinGigiDunShohuJing
Chinese Chemical Letters 2022年5期
Lin Chen, Xinshuo Wei, Feng Wng, Shoju Jin, Weisen Yng, Chunxin M,Gigi Dun, Shohu Jing,c,*
a Jiangsu Co-Innovation Center of Efficient Processing and Utilization of Forest Resources, International Innovation Center for Forest Chemicals and Materials,College of Materials Science and Engineering, Nanjing Forestry University, Nanjing 210037, China
b Fujian Key Laboratory of Eco-Industrial Green Technology, College of Ecology and Resources Engineering, Wuyi University, Wuyishan 354300, China
c Shandong Key Laboratory of Biochemical Analysis, College of Chemistry and Molecular Engineering, Qingdao University of Science and Technology, Qingdao 266042, China
dState Key Laboratory of Marine Resource Utilization in South China Sea, Hainan University, Haikou 570228, China
Keywords:Actuator Anisotropic structure Thermoresponsive Wood
ABSTRACT Stimuli-responsive hydrogels hold an irreplaceable statue in intelligent actuation materials because of their reversible stretchability and excellent biocompatibility.However, the poor mechanical performance and complicated fabrication process of anisotropic structures severely limit their further applications.Herein, we report a high-strength thermoresponsive wood-PNIPAM composite hydrogel actuator with complex deformations, through a simple in-situ polymerization.In this composite hydrogel actuator,the anisotropic wood and the thermoresponsive PNIPAM hydrogel hydroel can work together to provide bending and even other complex deformations.Owing to strong interfacial interaction, this actuator perfectly realized the combination of good mechanical properties (~1.1 MPa) and fast actuation speed(~0.9 s).In addition, by adjusting the orientation direction of wood, this actuator can achieve various complex deformations.Such composite hydrogel actuator could be a good candidate for intelligent applications, such as intelligent actuators, smart valves, manipulators and even soft robots.
Hydrogel actuators have attracted great attentions because of the large-scale shape deformation, excellent biocompatibility, and unique soft/wet performance [1–3].They can convert multitudinous external stimuli (light [4,5], heat [6], electricity [7,8], pH [9],etc.) into mechanical energy to exhibit reversible self-deformations.Therefore, hydrogel actuators have been widely applied in smart grippers, controlled drug delivery, soft robots, and other promising fields [10–15].In general, traditional hydrogel actuators usually possess isotropic structure so that they only provide simple volume shrinkage/expansion, which seriously limits their applications.To solve these problems, some anisotropic hydrogel actuators with complex deformations have been developed [16,17].For example,Li reported a bilayer smart hydrogel actuator based on a chitosan-PAAm semi-interpenetrating network that enables shape memory and reversible luminescence on/off switch [18].As the most common and simplest structure of anisotropic hydrogel actuators, the interface of bilayer hydrogel actuator is easy to peel off.Thence,gradient structure has become another mainstream research direction of hydrogel actuators.Liuet al.applied different magnetic fields to realize the gradient of magnetic nanoparticles, thus achieving various programmed shape changes [19].In addition,orientation and patterning are also important structure types of anisotropic hydrogel actuators, usually accompanied by 3D printing [20], electrospinning [21,22], photolithography [23], embedding aligned materials [24],etc.These preparation processes can fabricate many hydrogel actuators with anisotropic structure and subsequent complex stimuli-responsive self-deformations.However,their mechanical property is natural relatively week and the fabrication process are relatively complicated, which is still a bottleneck need to be broken.Therefore, simple and convenient fabrication method of hydrogels is greatly required to design high-strength actuators with complex self-deformations.
Inspired from nature, wood with biocompatibility, high strength, and anisotropic structures [25–27], would be an ideal option for the fabrication of anisotropic and strong composite actuators [28].In addition, as an important thermoresponsive polymer, PNIPAM has been widely concerned by researchers.The lower critical solution temperature (LCST) of PNIPAM is approximate 32 °C, around which the hydrophilic/hydrophobic state of PNIPAM change [29–31].Since thermoresponsive PNIPAM microgel was reported in 1986, more and more PNIPAM hydrogel actuators have been studied [32].Wuet al.fabricated an intelligent hydrogel sheet based on PNIPAM/PAMPS that enable different 3D shape conversion [33].Subsequently, PNIPAM based hydrogel actuators with new functions were developed.Chenet al.constructed a fluorescent PNIPAM hydrogel actuator and achieved the synergistic performance of driving and coloration [34].In all cases aforementioned, PNIPAM performed so well that it is the optimal material for the preparation of thermoresponsive hydrogel actuator.
Herein, we present a composite hydrogel actuator that consists of thermoresponsive poly(N-isopropylacrylamid) (PNIPAM)and anisotropic wood, owning excellent high strength property,fast thermo-responsiveness, and complex deformations.In this wood-PNIPAM composite hydrogel actuator, the active PNIPAM hydrogel layer byin-situpolymerization dominates the fast thermoresponsiveness, while the anisotropic wood sheet determines the complex deformations (Scheme 1).The combination of these two materials is advantageous and novel, which not only realizes the complex deformations of hydrogel actuator, but also provides higher mechanical properties.The success of wood-PNIPAM composite hydrogel actuator points out a new direction for the preparation and material selection of intelligent actuators.
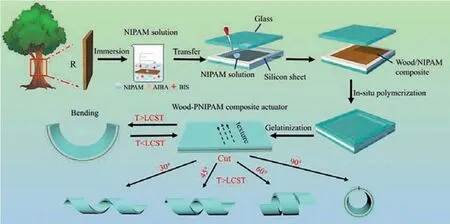
Scheme 1.Schematic illustration of preparation of wood-PNIPAM composite hydrogel actuator.
As a kind of natural organic composite materials, basswood possesses the characteristics of fine texture, anisotropic hierarchical porous structure and excellent high mechanical performance.Due to the anisotropy of basswood, three different sections can be obtained by different sawing methods, namely cross section,radial section and tangential section, and each section has diverse properties.As shown in Fig.S1 (Supporting information),the morphologies of three sections of basswood were observed.In Fig.S1a, a large number of parenchyma cells and vessels are distributed on the cross section of basswood, resulting in no obvious anisotropy of the section, which is not suitable for the preparation of anisotropic composite hydrogel actuator.However, Figs.S1b and c show the texture directions on the tangential and radial sections of wood.Furthermore, it can be seen from the figure that the textures on the tangential section are unevenly arranged in V-shapes,whereas the textures on the radial section are parallel arranged.Therefore, in theory, the radial section of the basswood is an admirable section for the construction of wood-PNIPAM composite hydrogel actuator.In addition, cellulose, hemicellulose, and lignin in wood not only constitute the fine microstructure of wood, but also provide many functional groups, which lay a well foundation for the combination of wood and other functional materials [35].Figs.S2a and b (Supporting information) are the comparison of physical photos for natural wood and wood-PNIPAM composite hydrogel.Obviously, the wood layer and the PNIPAM layer have been combined satisfactorily throughin-situpolymerization to form the composite hydrogel.
Fig.1a exhibits the structure characterization of wood-PNIPAM composite hydrogel.As revealed in Fig.1a, the wood-PNIPAM composite hydrogel emerges an obvious three-layer structure, with wood in the middle and hydrogel layers on both sides.In addition,the existence of hydrogen bonds between the hydrogel and wood results in strong interfacial bonding between them [35].Most notably, unlike the natural wood, the wood channels of the wood-PNIPAM composite hydrogel are filled with hydrogel, forming a structure like interpenetrating network that further promoted the binding of wood and hydrogel (Fig.1b and Fig.S3a in Supporting information).Fig.1c and Fig.S3b (Supporting information) display the microscopic morphology of PNIPAM layer with an isotropic structure.
As things stand at present, natural weak mechanical strength of common hydrogel actuators seriously restricts their further development.Therefore, it is a good method to combinate anisotropic basswood with high-strength to improve the mechanical performance of the hydrogel.Fig.1d and Fig.S4a (Supporting information) demonstrates the tensile strength of the wood-PNIPAM composite hydrogel actuator and pure PNIPAM hydrogel.It is found that the maximum strength of pure PNIPAM hydrogel and wood-PNIPAM composite hydrogel actuator is 21.5 ± 2 kPa and 1.1 ± 0.2 MPa, respectively.The strength of the wood-PNIPAM composite hydrogel actuator is much higher than that of pure PNIPAM hydrogel, which can significantly prove that the combination of wood does enhance the mechanical strength of the hydrogel.As a result, the experiment that an object weighing 52 g was easily lifted by the wood-PNIPAM composite hydrogel further confirmed the above conclusion (Fig.S4b in Supporting information).Even compared with previous reports, such as Alalginate/PNIPAM hydrogel [36], clay-PNIPAM hydrogel [37], PNIPAM/clay/CMCTs/GP NC DN hydrogel [38], GO–Clay-PNIPAM hydrogel [39], NCDN [40], PPU@PS-co-PNIPAM hydrogel (Fig.1e) [41],the wood-PNIPAM composite hydrogel actuator take great advantages.
The LCST of PNIPAM is generally 32 °C, which can be increased or decreased by combining with hydrophilic or hydrophobic polymers [42].As illustrated in Fig.1f, the presence of PVA enhanced the hydrophilicity of PNIPAM, resulting in the LCST increased to 34 °C.In order to explore the shape deformations of PNIPAM hydrogel, the equilibrium swelling rate (SR) was tested(the size of hydrogel strip is 0.5 × 20 × 20 mm3).From Fig.1g,it is known that the equilibrium swelling rate of PNIPAM hydrogel is 13 at 20 °C, and gradually decreases with the increase of temperature until the SR drops to 1.2 at 50 °C, indicating that the degree of shape change for PNIPAM hydrogel is large.The equilibrium swelling rate decreases sharply at 34 °C,which is consistent with the previous LCST test results.Meanwhile,the size change of PNIPAM hydrogel was recorded during the process (Fig.1g).
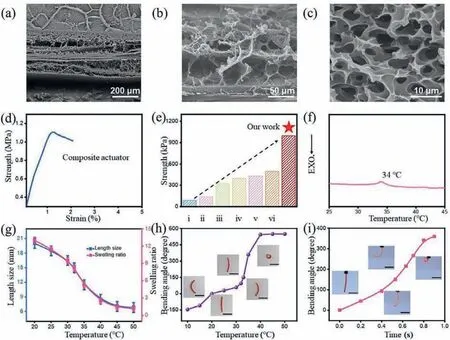
Fig.1.Structure and basic performance of wood-PNIPAM composite hydrogel actuator.(a) Cross-sectional SEM image of the wood-PNIPAM composite hydrogel.(b) SEM image of wood channels in wood-PNIPAM composite hydrogel.(c) Magnification SEM image of pure PNIPAM hydrogel.(d) Stress-strain curve of wood-PNIPAM composite hydrogel actuator.(e) Comparison of mechanical strength of previously reported composite PNIPAM hydrogels:(i) Al-alginate/PNIPAM [36], (ii) Clay-PNIPAM hydrogel [37],(iii) PNIPAM/clay/CMCTs/GP NC DN [38], (iv) GO-clay-PNIPAM [39], (v) NCDN [40], (vi) PPU@PS-co-PNIPAM [41].(f) DSC curve of PNIPAM hydrogel.(g) The equilibrium swelling rate and length size of PNIPAM hydrogel at different temperatures.(h) The bending equilibrium angle of the wood-PNIPAM composite hydrogel actuator at different temperatures.(i) Curve of bending angle over time of the wood-PNIPAM composite hydrogel actuator in 40 °C warm water.Scare bars in (h, i):5 mm.
Pure PNIPAM hydrogel is isotropic and can only produce simple volume shrinkage/expansion upon the trigger of heat.Owing to the anisotropic structure of the wood-PNIPAM composite hydrogel, this actuator can provide various complex self-deformations in response to the external temperature changes.The complex deformations of this actuator are mainly caused by the differentiation of volume expansion coefficient between pure PNIPAM part and wood part in this composite hydrogel actuator.Fig.1h shows the deformations of the wood-PNIPAM composite hydrogel actuator (0.5 × 3 × 10 mm3) at different water temperatures.It is observed from the figure that the wood-PNIPAM composite hydrogel actuator bends to the right when the water temperature is below 20 °C, otherwise the hydrogel actuator bends to the left.This is attributed to the expansion of PNIPAM hydrogel in cold water and the contraction of PNIPAM hydrogel in warm water, respectively.Beyond that, we also characterized the deformation and recovery rate of the wood-PNIPAM composite hydrogel actuator in 40 °C warm water and 20 °C cold water, respectively.To our delight, the wood-PNIPAM composite hydrogel actuator shows excellent shape deformation and recovery performance (Fig.1i and Fig.S5, Movie S1 in Supporting information).Firstly, the wood-PNIPAM composite hydrogel strip (0.5 × 3 × 10 mm3) was placed in 40 °C warm water and the bending deformation was observed.The results showed that the composite hydrogel strip could bend from 0° to 360° within 0.9 s, and the deformation speed was fast.It boils down to the thickness of the composite hydrogel strip, as the thinner hydrogel strip makes it possible for water to move in and out quickly.Afterwards, the curved composite hydrogel strip was quickly placed back in cold water at 20 °C to explore the shape recovery.The whole recovery process was completed within 4 min, and the whole composite hydrogel strip was basically restored to its original shape without damage.It is noteworthy that the entire shape deformation/recovery actuation process could be repeated 40 times without any fatigue (Fig.S6a in Supporting information).The wood-PNIPAM composite hydrogel actuator also possesses durability, and no clear change in bending angle was discovered after exposure to warm water for 360 s (Fig.S6b in Supporting information).
The regular arrangement of wood texture endows the wood-PNIPAM composite hydrogel actuator with the characteristics of anisotropy.Therefore, it is speculated that the complex deformations of wood-PNIPAM composite hydrogel actuator can be determined by the direction of wood texture.The wood-PNIPAM composite hydrogel was cut into strips (9 × 3 × 0.5 mm3) to test its complex deformations in 40 °C warm water (Fig.2a).When the wood texture is perpendicular to the long side of the hydrogel strip, the composite hydrogel was bent into a 360° ring.Then the wood-PNIPAM composite hydrogel was cut at different angles (the wood texture aligned at the angle of 30°, 45°, 60° with respect to the long side of the hydrogel strip) to observe the control of the wood texture on the complex deformations.It can be discovered from the physical photos that the wood-PNIPAM composite hydrogel strips of these three angles present a helical structure in warm water, and the pitch becomes shorter with the larger of the angle.This is related to the effect of wood texture orientation on the elastic modulus [43].Due to the anisotropy of wood chips, the elastic modulus parallel to the texture direction are much higher than those perpendicular to the texture direction, which leads to the controllable deformation of the actuator.Wood not only entrusts the wood-PNIPAM composite hydrogel actuator with anisotropy,but also endows it high mechanical performance.Inspired by the eagle catching prey, we designed a micro gripper to catch heavy object (Fig.2b, Movies S2 and S3 in Supporting information).When the gripper was in 20 °C cold water, the micro gripper was in a stretch state.With the gradual increase of temperature, the hydrogel changed from hydrophilic state to hydrophobic state.Moreover,as the temperature gradually increased, the gripper began to bend to grab heavy object owing to the anisotropy of the wood-PNIPAM composite hydrogel actuator.The weight of the heavy object can reach 30 times of the gripper itself.Shortly afterwards, the gripper gradually released the object when the water temperature slowly dropped to 20 °C.
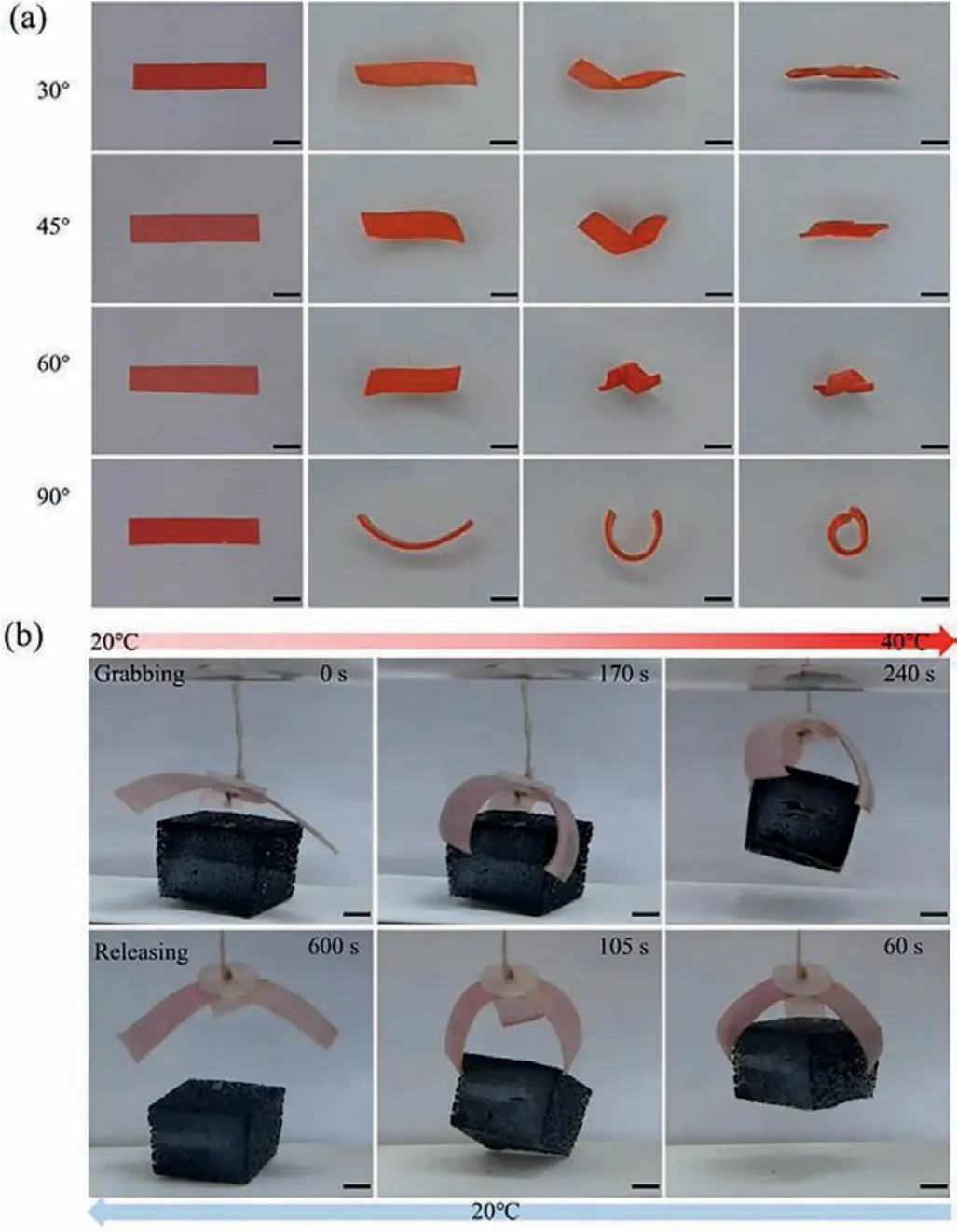
Fig.2.The actuation deformations and application of the wood-PNIPAM composite hydrogel actuator.(a) Complex deformations of the wood-PNIPAM composite hydrogel actuator.(b) Micro gripper grabs and releases heavy object (scale bars:3 mm).
In conclusion, we have successfully fabricated a high-strength anisotropic wood-PNIPAM composite hydrogel actuator byin-situpolymerization.This actuator possesses fast and powerful selfdeformations under external temperature stimulation.By cutting the wood-PNIPAM composite hydrogel at different angles along the direction of wood texture, the 2D sheet actuator can realize various complex stimuli-responsive deformations including helix and short tube 3D shapes.More importantly, the wood-PNIPAM composite hydrogel has high mechanical properties with 1.1 MPa of tensile strength, which can provide superior holding power.Therefore, we believe that this wood-PNIPAM composite hydrogel actuator can broaden the application of hydrogel actuators to a certain extent, and provide new ideas for the selection of composite hydrogel materials.
Declaration of competing interest
The authors declare no conflict of interest.
Acknowledgments
This work was financially supported by the National Natural Science Foundation of China (Nos.51803093, 51903123), Natural Science Foundation of Jiangsu Province (No.BK20190760),Open Project of Chemistry Department of Qingdao University of Science and Technology (No.QUSTHX201921), and Open Fund of Fujian Provincial Key Laboratory of Eco-Industrial Green Technology, China (Nos.WYKF-EIGT2020–3, WYKFGC2021–1).
Supplementary materials
Supplementary material associated with this article can be found, in the online version, at doi:10.1016/j.cclet.2021.09.075.
 Chinese Chemical Letters2022年5期
Chinese Chemical Letters2022年5期
- Chinese Chemical Letters的其它文章
- Recent advances in enhancing reactive oxygen species based chemodynamic therapy
- An integrative review on the applications of 3D printing in the field of in vitro diagnostics
- Recent developments of droplets-based microfluidics for bacterial analysis
- Dynamics and biological relevance of epigenetic N6-methyladenine DNA modification in eukaryotic cells
- Recent progress in advanced core-shell metal-based catalysts for electrochemical carbon dioxide reduction
- Recent advances in carbon-based materials for electrochemical CO2 reduction reaction