基于控制分配的推力矢量短距起飞垂直降落飞机减速过渡控制
2022-06-16 04:15:00刘亮唐勇陶呈纲甄子洋刘继承
哈尔滨工程大学学报 2022年6期
刘亮, 唐勇, 陶呈纲, 甄子洋, 刘继承
(1.南京航空航天大学 自动化学院,江苏 南京 210016; 2.中国航空工业成都飞机设计研究所,四川 成都 610091)
短距起飞垂直降落(short take-off and vertical landing,STOVL)飞机兼具固定翼和旋翼飞机的优点:既可以减少甚至摆脱对机场跑道的依赖,又具备飞行速度快、航程远、承载大和优异机动性能[1]。STOVL飞机主要可以分为推力矢量型、倾转旋翼型和尾座型,其中推力矢量型在战斗机领域应用前景广阔,典型代表型号如英国的“鹞”式、前苏联的“雅克”系列和美国的F-35B等。F-35B动力系统布局采用三轴承偏转喷管+轴驱动升力风扇+滚转喷管的形式,有效避免了高温燃气再吸入等问题[2],具有重要的研究价值。
推力矢量STOVL飞机具有悬停、巡航和过渡等3种飞行状态,其中过渡状态面临气动非线性,控制量冗余且耦合等问题,传统的线性控制器难以达到较好的控制效果[3]。目前,对于STOVL飞机过渡过程的研究主要集中在尾座型和倾转旋翼型上。尾座型飞机的主要控制难点是俯仰角大范围变化带来的非线性,以及垂直悬停过程中的欧拉角奇异问题。文献[4]在尾座无人机过渡过程中通过能量控制的方法,使用推力控制总能量,升降舵进行能量分配,较好地完成了过渡过程。文献[5]提出了最快模式转换定高控制策略,在限制高度变化的同时,快速平稳地完成了飞行模式转换。倾转旋翼型的主要控制难点是机翼倾转角和速度变化带来的非线性影响,传统的飞行控制律设计方法需要根据旋翼倾转角和水平速度设计过渡轨迹,对不同状态进行增益调度[6]。文献[7]提出了自适应模型逆控制技术,通过非线性模型逆和自适应神经网络的综合控制方法,避免了传统控制系统复杂的参数调节过程。
虽然推力矢量型STOVL飞机与尾座型以及倾转旋翼型在功能上有很多相似性,但是在气动布局和非线性特性上与二者有很大的差异。推力矢量STOVL过渡过程中,三轴承矢量喷管偏转角、升力风扇偏转角和速度都是引起飞机非线性的因素。目前国内外对于推力矢量STOVL飞机过渡过程的研究较少,如果套用倾转旋翼机的增益预置与生成轨迹的方法,将会面临极大的计算量。其次,倾转旋翼机的倾转机构带宽明显低于其他执行器,故倾转旋翼机在过渡过程中,倾转机构并不参与飞机的姿态控制。但推力矢量STOVL飞机的升力风扇和三轴承偏转喷管偏转机构带宽比发动机高,因此仅用推力和舵面控制姿态,控制效果较差。反之,使用升力风扇和三轴承推力矢量喷管进行控制则面临着耦合、非线性的难题。文献[8]采取固定升力风扇偏转角,但固定升力风扇偏转角,减弱了飞机的控制能力。对于缩比F-35B模型,文献[9]对线性化的纵向模型,设计了一种单步最优控制器,以最大水平加速度为目标,使用梯度下降法获得控制量。文献[10]通过梯度下降法获得最优过渡过程轨迹,然后引入反馈控制,使目标按照预设轨迹进行过渡。但过渡轨迹计算量大,必须离线计算并存储。文献[11]采用非线性动态逆(NDI)方法对无人机进行过渡机动控制,利用序列二次规划非线性优化算法对耦合且冗余的控制量进行求解。但动态逆方法难以解决气动不确定性问题,该控制分配算法对计算机算力要求较高。文献[12]对于倾转四旋翼过渡状态的航迹和姿态控制问题,通过线性化的方法将控制问题解耦,并利用伪逆法求解控制分配问题。综上,对于推力矢量STOVL过渡段控制问题,目前大部分文献通过将控制模型分段化、仅研究纵向模型而忽略横侧向运动的耦合、将部分冗余控制量固定等方法将控制模型简化。
非线性增量动态逆(incremental nonlinear dynamic inversion,INDI)方法是近年来对NDI方法的改进方向之一,该方法将模型在增量形式下线性化,进而利用线性控制律设计方法。相较于NDI方法,INDI方法降低了对系统模型精确度的依赖,减弱控制系统中不确定性的影响。文献[13-14]将INDI方法应用于四旋翼飞行器上,并通过飞行试验验证了所设计控制律的有效性。文献[15-16]针对2种不同构型的倾转三旋翼飞行器,使用INDI方法设计了姿态控制律,通过仿真及试飞验证了该方法对参数摄动和外界干扰的鲁棒性。
对于推力矢量STOVL飞机减速过渡段控制,对于这样的过驱动系统受限控制分配问题,本文采用分层设计思想,以增量动态逆方法设计控制律获得虚拟控制指令,并考虑执行机构位置和速率约束设计目标函数,然后使用改进的粒子群算法求解满足条件的控制量。通过仿真实验验证了该方法的有效性和鲁棒性,过渡过程具有时间短、姿态平稳的优点。
1 STOVL飞机非线性模型
所建立的STOVL飞机模型基于NASA艾姆斯研究中心提出的一型验证机[17-18],该机采用单发动机、三角翼、鸭翼、双垂尾的布局形式,如图1(a)所示。

图1 STOVL飞机概念方案Fig.1 STOVL aircraft propulsion system
推进系统采用与F-35B相同的复合型推进系统,由尾部的三轴承偏转喷管、机体中部的升力风扇及机翼下的2个滚转控制喷管组成,具体形式如图1(b)所示,主要参数如表1所示。本文建模所需的气动系数、起降过程中的地面效应、喷气诱导效应、发动机吸气效应通过计算流体力学和验证机实验获得[17],采用多项式拟合或三次样条数据插值方法建立数据库,用于数字仿真计算。

表1 STOVL飞机主要参数Table 1 General characteristics of STOVL aircraft
飞机的运动学和动力学方程可写为:
(1)

1.1 空气动力产生的力与力矩
由于STOVL飞机的非线性气动力特性主要体现在非常规飞行模式下,此时飞行速度通常不大,因此将定常气动系数简化地表示为迎角α的非线性函数形式:
(2)
1.2 推进系统产生的力与力矩
STOVL飞机的推进系统可在非常规飞行模式下提供直接升力与控制力矩,其产生的力包括各矢量机构的推力和由主进气道、升力风扇进气道的气体流量变化造成的推力损失。将上述各力与力矩在机体系下分解后叠加,得到由推进系统产生的纵向力Txb、侧向力Tyb和法向力Tzb分别为:
(3)
各进气道的推力损失分别为:
(4)
由各推力矢量装置偏转或推力转换而产生的控制力矩分别为:
(5)
由进气道推力损失造成的三轴力矩分别为:
(6)

本文所有执行器动态通过一阶环节模拟,其带宽、位置约束和速率约束如表2所示。

表2 执行器带宽和约束参数Table 2 Actuator bandwidth and constraint parameters
2 基于智能控制分配的控制器设计
2.1 控制问题与控制系统总体架构
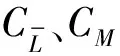
经典飞行控制系统在进行控制律设计时,控制器在3个控制通道的输出通常是舵机系统的数字输入量,也就是各操纵面的偏转角度。多操纵面飞机控制分配技术在经典控制系统的基础上增加了分配律,其结构如图2所示。控制律的输出表征了飞机对三轴期望力矩或角加速度的需求,而分配律则根据各操纵面偏转量与期望力矩或角加速度的关系求解出各操纵面的偏转量。
图2 多操纵面飞机控制分配结构Fig.2 Control allocation structure of multiple control surfaces aircraft
采用控制分配设计的控制器具有显著的优点:将控制器设计分层化,简化了控制律设计;分配律可以直接处理操纵面的约束问题,有利于操纵面的任务调度和管理;操纵面发生故障时,不需要重新设计控制律,通过重分配可以实现主动重构控制。因此,下面根据控制分配方法设计推力矢量STOVL飞机减速过渡过程控制器。
2.2 控制律设计
非线性动态逆(nonlinear dynamic inversion,NDI)作为非线性系统反馈线性化设计的一种方法,基本思想是利用全状态反馈抵消原系统中的非线性特性,具有通道间可解耦、无需复杂增益调节、改变被控对象参数不影响其线性解耦控制及增益等优点。但传统NDI方法依赖于精确的系统模型,对气动不确定性和系统参数摄动的鲁棒性较差。增量非线性动态逆控制将控制方程写成增量形式,以加速度作为控制反馈,解算控制增量,从而减少对系统模型的依赖,提高系统的鲁棒性。
本文将NDI/INDI方法结合奇异摄动理论,把飞控系统的状态变量按照响应速度快慢分为多个回路,由内到外逐个回路进行控制律的设计。
2.2.1 快回路设计
角速率回路是系统的快回路,根据式(4),角速率变量可以表示为:
(7)
式中:Ma为飞机运动产生的气动力矩;Mc为控制量δ(包括气动舵面和推力矢量)产生的操纵力矩。其中,Ma是造成控制中参数不确定性的主要原因[16]。为了增强系统鲁棒性,该回路采用INDI方法,在状态点(ω0,δ0)的邻域内对式(7)进行Taylor展开,得到一阶近似表达式:
ω×Jω)]ω=ω0,δ=δ0(ω-ω0)+
(8)

(9)
定义控制效率矩阵Be1和控制增量dδ:
(10)
dδ=δ-δ0
(11)
则式(9)可表示为:
(12)
根据非线性动态逆理论,期望的角加速度ωd求解:
(13)
2.2.2 较慢回路设计
姿态角回路是系统的较慢回路,为快回路提供角速度指令,该回路不需要气动力或气动力矩估算,因此采用NDI控制即可。姿态角变量微分方程可以表示为:
(14)
(15)
同理,根据NDI控制方法,忽略快回路动态响应可以得到:
(16)
(17)
2.2.3 慢回路设计
慢回路用于控制飞机的速度和气流角,该回路中包含气动力计算,因此采用INDI方法控制。式(1)中的三轴速度微分方程可表示为:
(18)
式中Fb=Fa0+Fac+Tb+Gb,为各力在机体系上的合力;Fa0为飞机运动产生的气动力;Fac为气动舵面偏转产生的气动力;Tb为矢量推力;Gb为重力。
在状态点(Vb0,δ0)的邻域内展开式(18)得:
Fb/m]Vb=Vb0,δ=δ0(Vb-Vb0)+
(19)
同理,式(19)可简化为:
(20)
定义控制效率矩阵Be2:
(21)
则式(20)可表示为:
(22)
(23)
联立式(12)与式(22),利用控制分配模块进行解算,即可获得每个控制周期的控制增量dδ:
(24)
2.3 不确定性分析
飞机快回路和慢回路均可表示为一个含有不确定性的仿射非线性系统:

(25)
若对式(25)采用NDI控制律,则闭环系统可表示为:
Δg(x)[g-1(x)(γ-f(x)]=[Δf(x)-
Δg(x)g-1(x)f(x)]+[I+Δg(x)g-1(x)]γ
(26)
式中γ是伪指令。由于不确定性的存在,NDI控制律无法完全线性化系统。
若对式(25)采用INDI控制律,由于控制律中不涉及Ma或Fa0,并且假设加速度测量值准确无误,因此气动模型的不准确不会带来f(x)的摄动变化,即Δf(x)=0。

(27)
根据INDI原理,可以得到:
(28)
具体地,对于飞机的快回路和慢回路:
(29)
式中ΔBei为系统控制效率矩阵不确定性参数,主要与系统的转动惯量误差和控制导数误差有关。
将控制律式(13)和式(23)代入式(29),可以得到:
(30)
Laplace变换后可以得到:
(31)
整理可以得到:
(32)
根据上述推导可知:INDI能够抑制飞机的非线性、气动不确定性的影响,不需要准确的气动力模型,降低了对模型参数的敏感性。模型中由于参数摄动引起的动力学特性改变,也反映在加速度的测量值中并作为控制反馈,极大增强了鲁棒性。
2.4 基于Kalman滤波的角加速度估计
INDI控制是基于加速度反馈设计的,因此加速度信息的准确性、实时性影响控制效果。考虑到一般飞控硬件采用惯性测量单元获取线加速度和角速度,但没有传感器直接测量角加速度。由于直接对角速度进行数值微分得到的角加速度噪声过大,而二阶低通滤波后再求导则会带来相位滞后和时间延迟。为了解决该问题,可利用Kalman滤波对角加速度进行估计。
根据等加速度的模型,建立Kalman滤波的状态方程和观测方程分别为:
(33)

(34)
Kalman滤波器的递推求解过程即为角加速度估计的过程,根据数字仿真中测量的俯仰角速度,分别利用直接微分、低通滤波后微分和卡尔曼滤波3种方法求解加速度并比较。
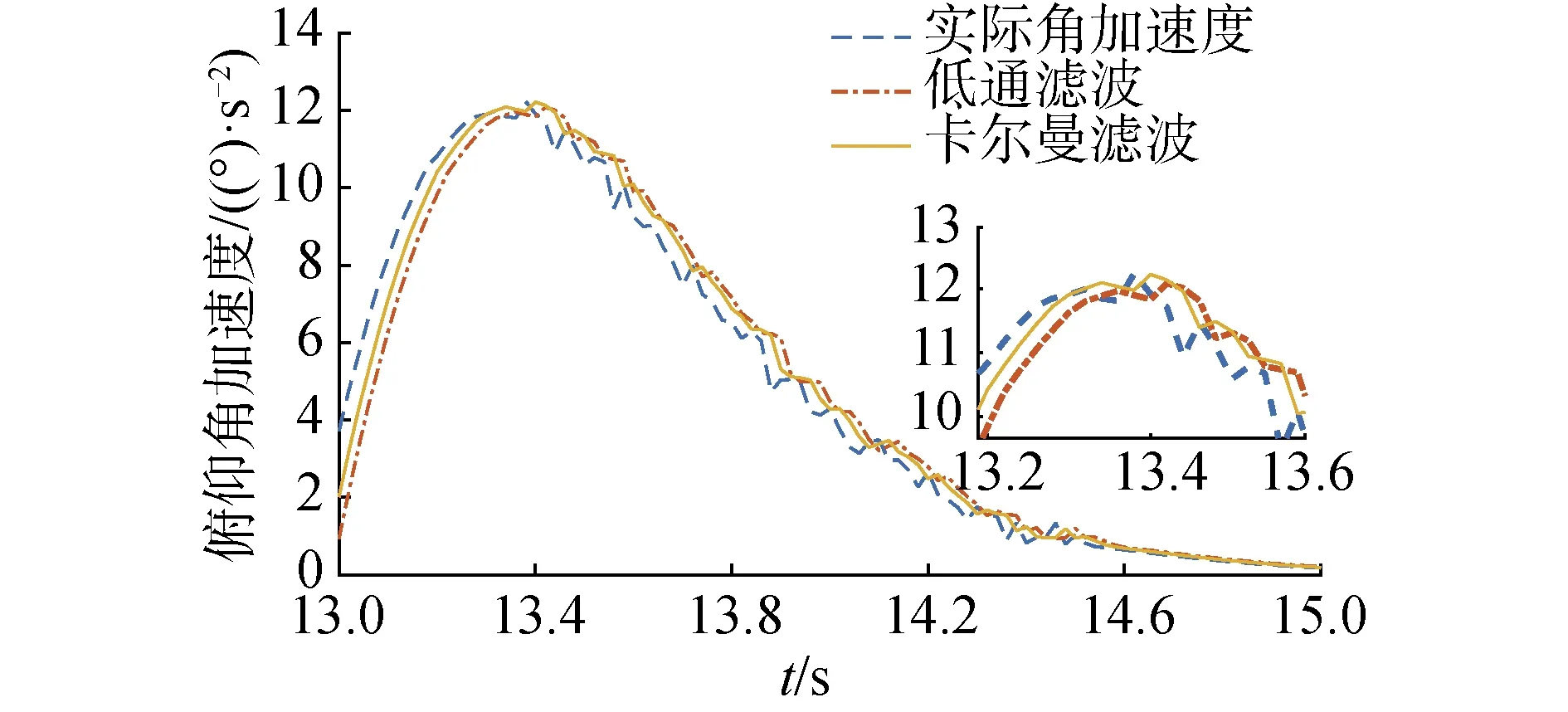
图3 角加速度估计对比Fig.3 Angular acceleration estimation
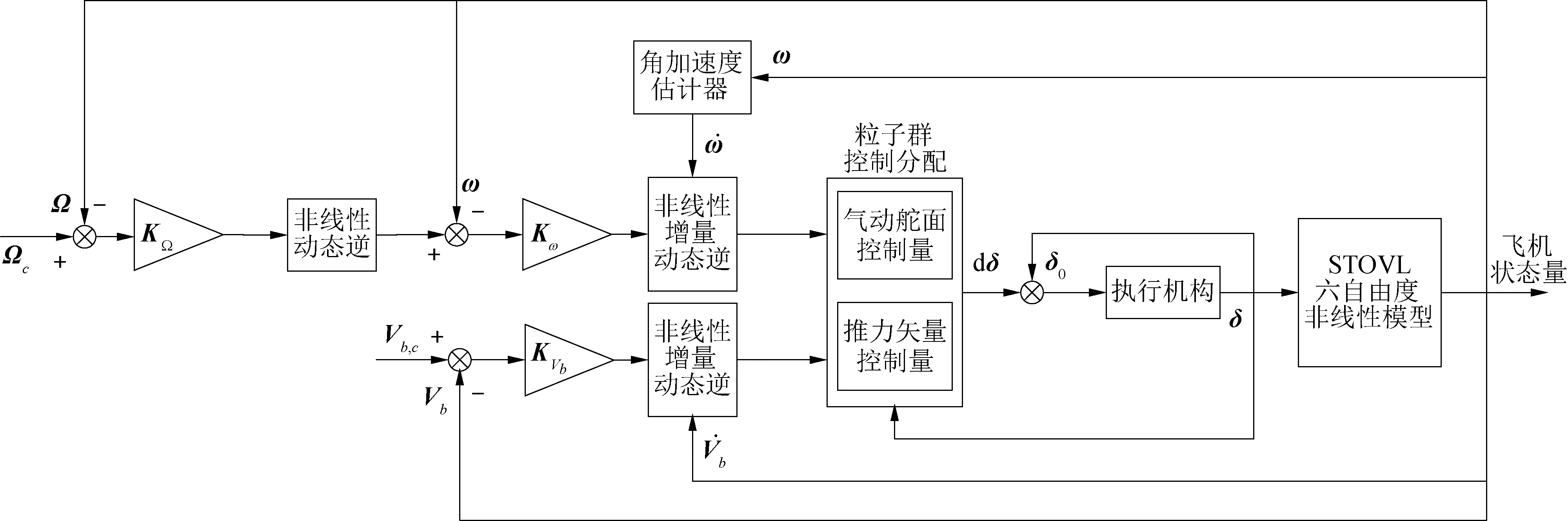
图4 控制结构Fig.4 Block diagram of control system
3 基于改进粒子群算法的控制分配
控制分配指的是对于过驱动系统,在满足执行机构约束条件下,将控制伪指令依据某种优化目标分配给各个执行机构,从而满足飞行器的控制要求。常见的广义逆类方法虽然具有设计简单、实时性好等优点,但对于非线性特性比较严重的对象,其精度会大大降低,且难以处理执行器物理约束的问题。其次基于数学规划类的方法,由于传统的数值优化算法存在计算量大、收敛速度慢、对目标函数性质有要求等不足。近年来,智能算法在控制分配领域的应用受到了越来越多的重视[19-21]。
3.1 过渡过程目标函数设计
将推力矢量STOVL飞机减速过渡段控制分配问题转化为在已知非线性优化目标和约束条件背景下求解参数最优的问题,对于减速过渡过程,首先考虑的因素有:1)飞机能否准确跟踪控制指令;2)减速完成后三轴承推力矢量喷管的偏转角达到90°左右;3)优先使用气动舵面。故减速过程的优化目标为:
minJ=(Bedδ-v)TW(Bedδ-v)
(35)

考虑到执行器位置约、速率约束及飞控计算机以离散方式处理数据,若系统采样周期为ΔT,则第i个控制量的位置约束和速率约束可以表示为:
δi,min-δi(t-ΔT)≤dδi≤δi,max-δi(t-ΔT)
(36)
(37)
为了在控制过程中给执行器留下充足的控制余量,本文对于位置约束条件设计代价函数:
(38)

对于速率约束条件,代价函数表示为:
(39)

因此,减速过渡过程的优化目标函数为:
minJ=(Bedδ-v)TW(Bedδ-v)+
(40)
通过改进的粒子群算法,求解该优化函数的最小值,即可得到相应的控制增量。
3.2 改进粒子群算法
粒子群算法作为一种智能优化算法,具有精度高、收敛快、调节参数少等优点,在求解复杂的优化问题上较传统算法具有更加优异的特性[22]。经典粒子群算法在设置最重要的惯性权重w和加速因子c1、c2值时,大多依赖经验,或者根据大量仿真来确定一个固定值,难以兼顾全局搜索能力与局部搜索能力。
本文根据粒子适应度,采用自适应方法确定惯性权重w。对于具有较高适应度的粒子pi,所在区域存在能更新全局最优值的粒子px的可能性较高,应当减小pi的惯性权重,提高局部搜索能力;适应度较低的粒子,则应增大其惯性权重,尽快跳出当前区域,提高全局搜索能力。
假设某粒子pj的适应值为fj,种群内个体最优适应值为fb,个体最劣适应值为fw。根据fj到fb的距离,对惯性权重进行不同的自适应变化:
0.5(wmax+wmin)
(41)
式中:wmin=0.4,wmax=1。
加速因子c1、c2分别代表粒子对自身历史经验的记忆和粒子间协同合作共享信息的能力,本文前期采取较大的c1和较小的c2,增强粒子的全局搜索能力;随着算法迭代,逐步减小c1增大c2,提高局部搜索能力。
(42)
式中:n为当前迭代次数,加速因子大小线性变化,取nmax=80,c1,max=c2,max=2,c1,min=c2,min=1.2。
3 仿真结果及分析
为了验证所设计的控制器的有效性,基于Matlab/Simulink平台进行仿真实验。系统初始状态为水平无侧滑飞行:高度h0=200 m,速度V0=91.4 m/s,迎角与俯仰角α0=θ0=10.7°,其他状态量均为零。在无干扰情况下,给出速度指令、气流角指令和姿态角指令,考察系统跟踪指令的快速性和准确性,以及解耦能力。其中,增大迎角与俯仰角是为了增大空气阻力进行减速,迎角指令滞后于俯仰角指令的目的是使飞机轨迹角大于零,保证飞行安全。
为了分析控制器的鲁棒性能,在其他条件与无干扰状态一致的前提下,2种特殊情况也被用于仿真实验:1)气动参数摄动30%;2)在机体系三轴加入表示的气动力扰动:
(43)
式中:i=x,y,z,m为飞机质量;R为取值范围在0~1且周期为2.5 s的随机数,体现复杂环境下风场的突变性扰动;周期为40 s的正弦函数,体现风场的宏观周期性扰动。
图5与图6的仿真结果显示:
1)在无干扰状态下,STOVL飞机的速度、姿态和气流角均能平稳响应指令信号,无震荡与超调,验证了控制律对解决气动非线性、控制耦合和冗余的能力,以及分配算法的解算能力。
2)在参数摄动状态下,各飞行状态依然可以保持原有的响应性能,这是由于INDI本质上是通过加速度反馈降低了控制器对气动参数、控制导数参数和转动惯量参数等模型参数不确定型的敏感度。
3)在风干扰状态下,飞机姿态会出现短暂的小幅波动,但在可接受的范围内。改进的粒子群算法在存在不确定性时,仍然可以根据各执行器的物理特性,以使用代价最小为目标,寻找满足条件的控制增量。
4)在各个状态下,操纵面偏转速率和位置均满足执行器物理约束,优先使用气动舵面,使推力矢量装置偏转速率保持较低水平。升力风扇与矢量尾喷管在过渡段结束后均偏转至机体垂向,便于切换为悬停段控制器。
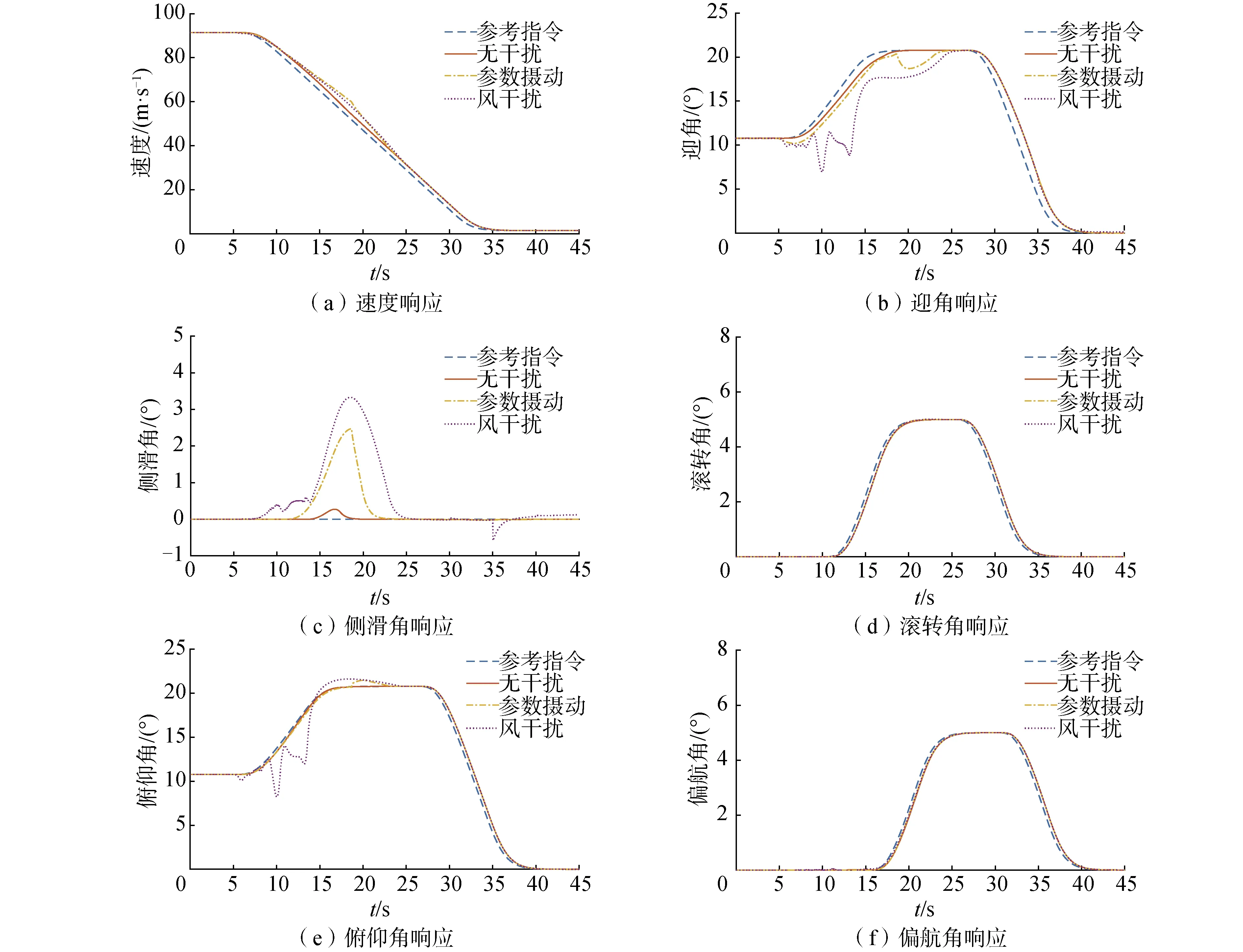
图5 减速过渡段飞行状态响应Fig.5 Flight state response during deceleration transition

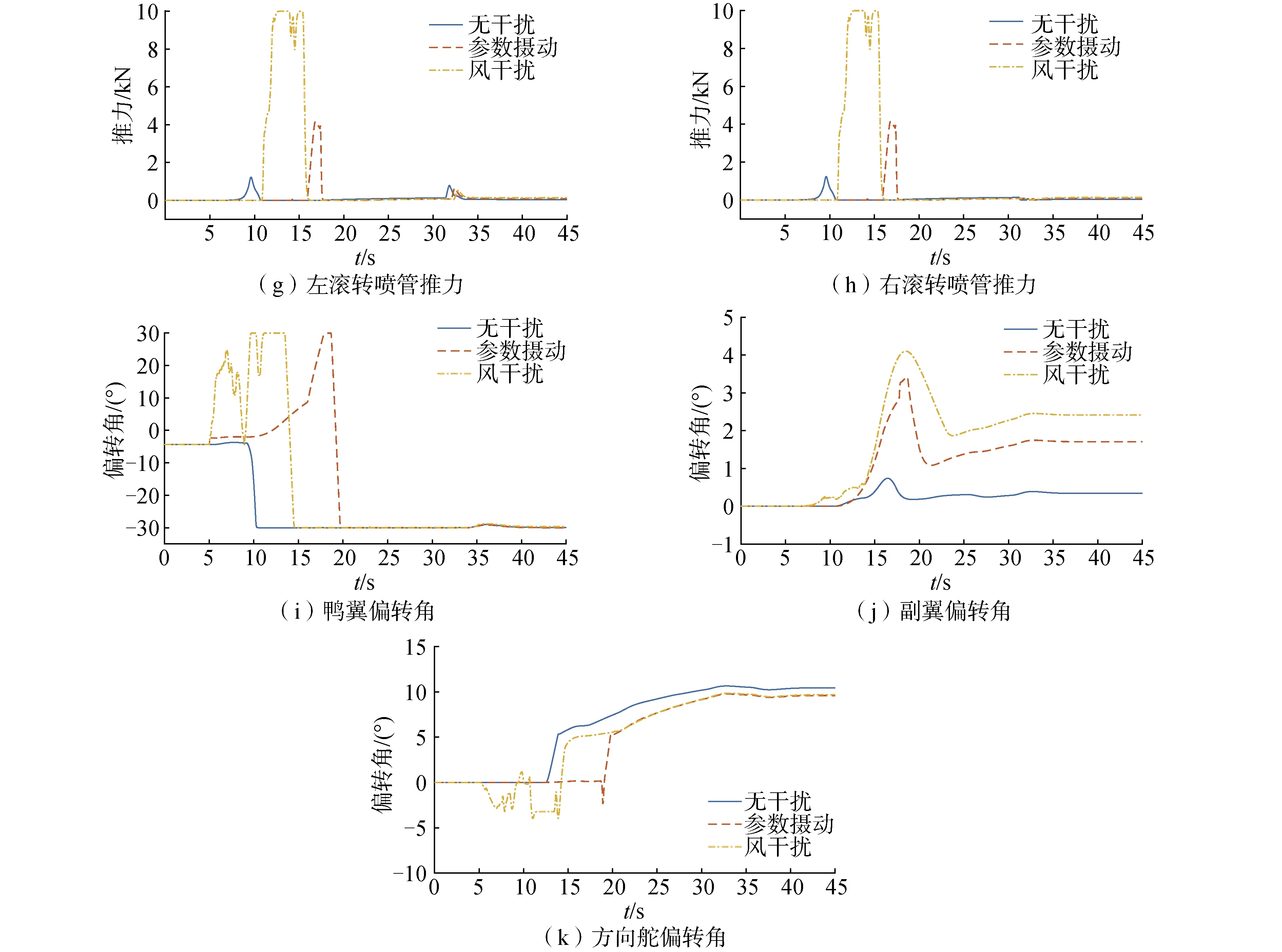
图6 减速过渡过程控制量输入Fig.6 Control input during deceleration transition
4 结论
1)控制律采用增量动态逆方法,通过引入加速度反馈,降低了对控制模型精度的要求,使系统能够应对一定程度的参数摄动和外界干扰,增强了控制的鲁棒性。所需的角加速度通过卡尔曼滤波获得,改善了直接微分带来的高频噪声或低通滤波的时延问题。
2)对于多执行器冗余的控制分配问题,考虑到执行器物理特性,建立了反映控制目标和执行器要求的优化目标函数,使用改进的粒子群算法求解气动舵面与推力矢量控制增量。该方法具有简单直观、物理意义明确的优点,通过仿真算例,验证了所提出方法在实现动力学解耦和多操纵量控制分配方面的有效性,为进一步研究故障情况下主动重构控制奠定基础。
猜你喜欢
天然气与石油(2022年4期)2022-09-21 07:05:54
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
测控技术(2018年12期)2018-11-25 09:37:50
测控技术(2018年9期)2018-11-25 07:44:24
制造技术与机床(2017年9期)2017-11-27 02:13:45
现代防御技术(2016年1期)2016-06-01 12:13:28
自动化学报(2016年8期)2016-04-16 03:38:51
自动化学报(2016年5期)2016-04-16 03:38:49
新高考·高一物理(2016年1期)2016-03-05 22:47:39