
基于LCC并联拓扑结构和无源控制的动态无线恒流充电方法
2022-06-11 01:42徐小野
深圳职业技术学院学报 2022年3期
徐小野
基于LCC并联拓扑结构和无源控制的动态无线恒流充电方法
徐小野
(深圳职业技术学院 智能科学与工程研究院,广东 深圳 518055)
文章提出一种用于动态无线充电的LCC并联拓扑结构和PI加无源控制(PI-PBC)恒流控制算法.LCC并联拓扑结构可以使动态充电过程中的发射和接收线圈有比较稳定的互感,再结合PI-PBC控制算法,实现接收端更高更平稳的功率输出,从而提高动态无线充电过程中电池的充电效率和充电稳定性.该拓扑方法可以用于不同功率等级的动态无线充电平台.
无线充电;电力电子;控制理论
传统新能源汽车通过固定位插头充电、更换电池及采用刷板刷块的方式充电,这些方法或者存在安全隐患、或者影响工作效率.而新能源汽车的动态无线充电技术有充电可靠、安全、便捷等特点,近年来发展迅速.但现有的动态无线充电拓扑结构和控制算法很难保证在动态充电过程中的充电电压和电流的稳定,这样就降低了电动车运动过程中的充电效率和安全性,也达不到锂电池恒流恒压充电的要求.有很多高校和研究所都开始加入到无线充电技术的研究队伍中,通过改变电路拓扑、优化线圈结构、调整控制算法等方式来增加系统的充电功率和提高充电效率,取得了不错的动态无线充电效果[1-12].本文在以有研究基础上,提出一种用于动态无线充电的LCC并联拓扑结构和PI-PBC恒流控制算法.
1 动态无线充电系统结构
1.1 总体结构
本文设计的动态无线充电系统如图1所示,可以看出动态无线充电系统由发射端部分和接收端部分组成.发射部分由发射控制器和发射线圈组成,发射控制器内部包含滤波电路、全桥逆变器、谐振补偿网络及控制电路等;接收端装在车上,一套能量接收设备由多个能量接收线圈和接收控制箱组成,接收控制箱内包含多个谐振补偿电路、多个整流电路、BUCK电路及控制电路等.接收端接收到的高频交流电通过整流电路转化为直流电,再通过BUCK电路和控制电路的控制调整,获得更大更稳定的输出功率,输出给负载.
1.2 线圈结构设计
动态无线充电线圈结构是根据实验车的车体尺寸设计的双矩形线圈,单个线圈由2个小的矩形线圈组成,并在线圈下方铺3条磁芯,单个线圈的尺寸见表1.发射端线圈铺设方式为每隔一个线圈宽度铺设一个发射线圈,接收端采用2个线圈或4个线圈组成一个线圈组,如图2所示.这种设计的线圈组可以在同样电路参数下提高接收端的功率,并且保证原副边线圈互感值的稳定,再通过DC/DC电路的控制,可以得到更高更稳定的功率输出.
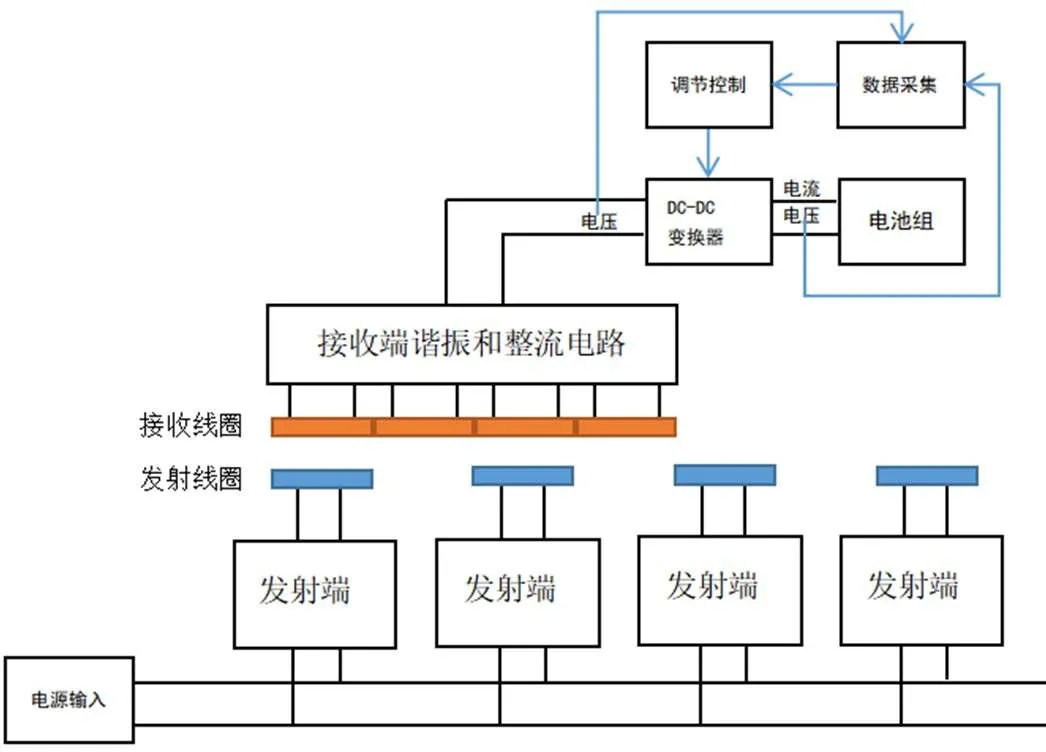
图1 动态无线充电系统结构图

表1 单个线圈的尺寸表

图2 AGV动态无线充电接收线圈设计图
采用设计的线圈结构,当接收端分别采用1个线圈、2个线圈组成的线圈组及4个线圈组成的线圈组时,通过ANSYS电磁仿真实验,互感结果见表2.从结果可以得出2个线圈和4个线圈组成的线圈组不仅可以保持原副边线圈互感值的稳定,还可以提高互感值.

表2 原副边线圈ANSYS电磁仿真互感结果(μH)
1.3 电路拓扑结构
电路电子仿真软件PLECS有仿真速度极快、操作简单、仿真精度高等优点,用PLECS软件做无线充电的电路电子仿真非常适合.图3所示是在PLECS里搭建的一个基于LCC并联的动态无线充电仿真模型,其中动态原副边线圈感值数据由AHSYS线圈仿真获得,再将离散的点曲线拟合,获得动态过程中互感的函数,其中所选元器件参数见表3.
2 系统模型与控制算法
即使采用多个接收线圈,原副边的耦合在仿真过程中是相对稳定的,但实际情况下一定是有一定波动的,并且为了提高输出功率,一定要控制DCDC电路的前段电压来提高输出功率,DCDC电路原理如图4所示.本发明采用的控制方法是在控制外环采用PI控制负载电流,内环控制采用无源控制方法控制DCDC电路的前段电压值.
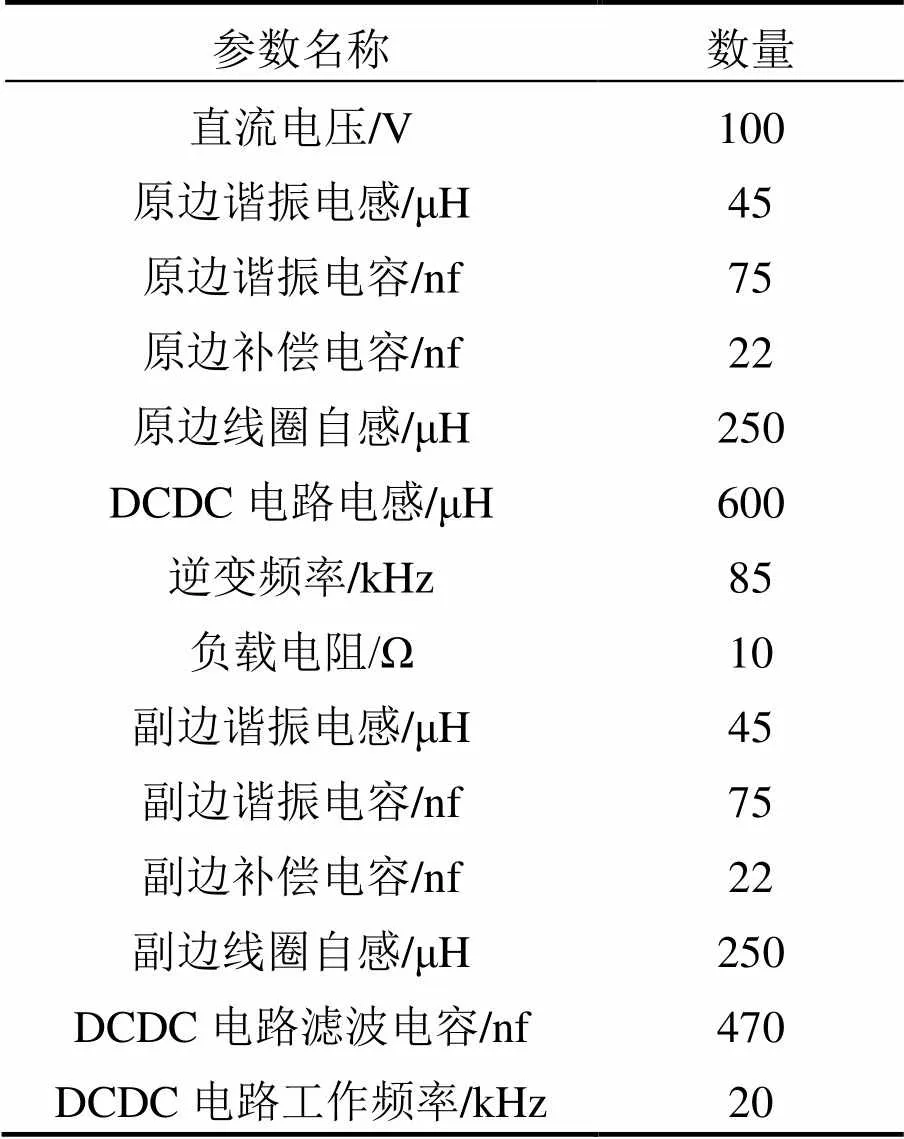
表3 动态无线充电原副边元器件参数表

图3 2个接收线圈的电路仿真模型
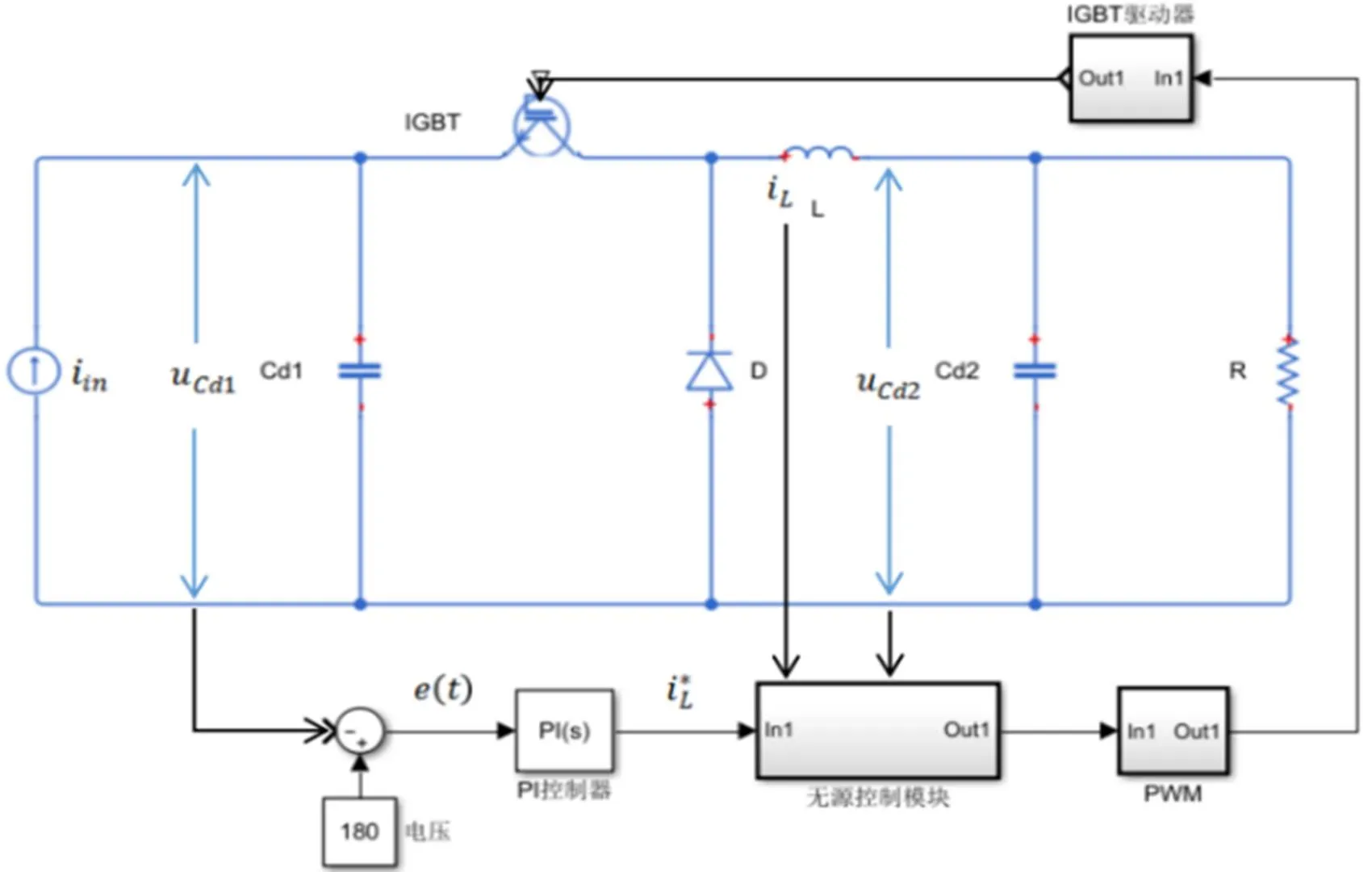
图4 DCDC电路图
忽略寄生参数,描述动态无线充电DCDC电路状态平均模型的微分方程模型如下:

其中C1、C2和分别表示输入电容、输出电容和电感;u1、u2、i和i分别表示输入电容器电压、输出电容器电压、电感器电流和输入电流;是电路的输出负载电阻值.
图4所示的外环DCDC输入电压控制利用PI控制算法,如公式2和3所示.



内环的电流控制利用利用无源控制算法来给定DCDC电路IGBT的PWM波形,如公式4所示.

其中为DCDC电路IGBT的占空比;是电路的虚拟阻抗.
3 仿 真
本发明分别做了采用1个接收端、2个接收端并联和4个接收端并联的动态无线充电仿真,控制电路分别采用开环、PID控制和PI加无源控制方法来控制DCDC电路前端电压及负载充电电流的稳定,具体仿真结果如图5~9所示.
图5和图6是在DCDC控制电路分别采用开环、PID控制和PI加无源控制方法来控制负载的电流和DCDC电路前端电压,源边输入电压是200V,从仿真结果可以看出,当开环不控制的时候,输出电压和电流都很低,也有一定的波动;采用PID控制策略时,电压和电流可以提高,但波动较大;而采用PI加无源控制方法时,既可以控制提高负载电压和电流,又能保持系统的稳定.
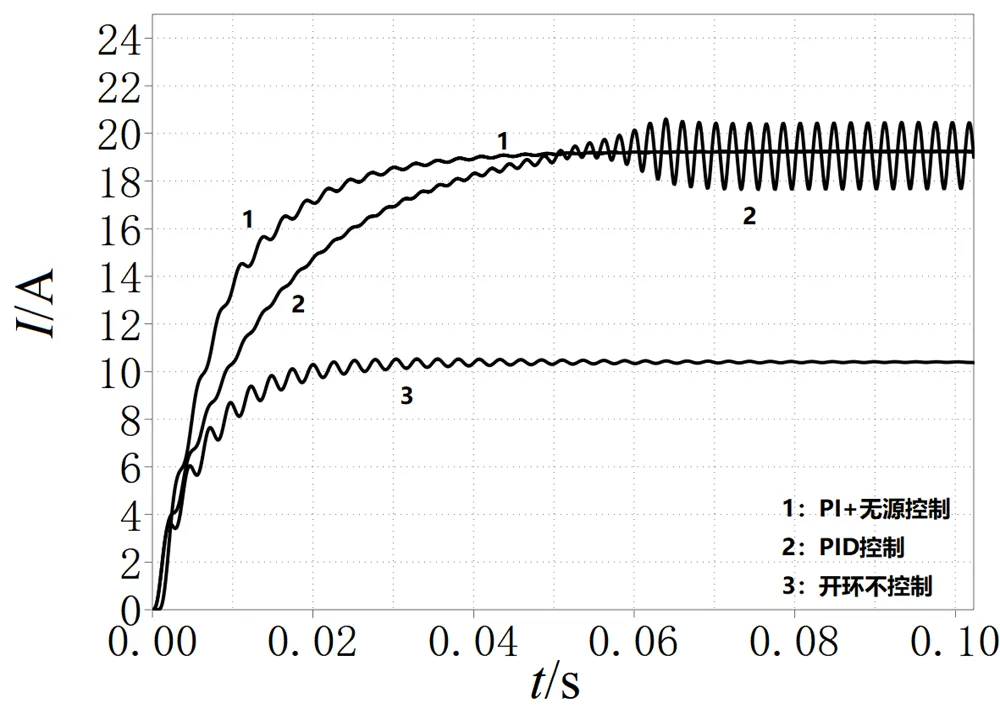
图5 采用不同控制方法时负载电流

图6 采用不同控制方法时负载电压
图7和图8分别展示了1个接收线圈,2个接收线圈组和4个接收线圈组的动态无线充电仿真负载电阻的动态电流值和电压值,控制方法都采用PI加无源控制,从图中可以看出3条曲线都是平稳变化的,验证了控制方法的有效性;当接收线圈从1个、2个一组到4个一组,清晰的看出负载的电流和电压值越来越趋于平稳,验证了在动态无线充电过程中采用多个接收线圈的有效性,并且提高了负载的充电功率.

图7 不同数量接收线圈动态无线充电负载电流

图8 不同数量接收线圈动态无线充电负载电压
图9展示了1个接收线圈,2个接收线圈组和4个接收线圈组的动态无线充电仿真时DCDC电路的前端电压的动态曲线图,仿真所给定的DCDC前端电压值为400 V,控制方法都采用PI加无源控制,从图中可以看出3条曲线变化都在控制要求范围内,验证了控制方法的有效性;当接收线圈从1个、2个一组到4个一组,也可以清晰的看出DCDC电路的前端电压越来越趋于平稳,并在采用4个接收线圈组的时候,很好稳定在400 V附近,偏差非常小,验证了在动态无线充电过程中采用多个接收线圈组方法的有效性.

图9 不同数量接收线圈时BUCk前端电压
4 结 论
本文提出的动态无线充电PI结合无源控制算法,可以控制提高负载的充电电压和电流,使得充电电压和电流平稳变化,提高功率的情况下,又能保证负载充电过程中的稳定性;本文提出的在动态无线充电过程中采用LCC并联的方案有效的提高了原副边线圈互感的平稳性,在电路仿真的结果也可以看出,在动态无线充电过程,提高了DCDC前端电压和负载电流的平稳性,满足了动态运动过程中提高充电功率和恒流充电的要求;本文开发的动态无线充电LCC并联和PI加无源控制算法也可以扩展到其他功率等级的动态无线充电系统.
[1] Onar O C, Miller J M, Campbell S L, et al. Oak Ridge National Laboratory Wireless Power Transfer Development for Sustainable Campus Initiative[C]// Transportation Electrification Conference and Expo IEEE, 2013:1-8.
[2] Onar O C,Miller J M, Campbell S L, et al. A Novel Wireless Power Transfer for In-motion EV/PHEV charging[C]// Applied Power Electronics Conference and Exposition. IEEE, 2013:3073-3080.
[3] Miller J M, Onar O C, Chinthavali M. Primary-Side Power Flow Control of Wireless Power Transfer for Electric Vehicle Charging[J].Journal ofand, 2015,3(1):147-162.
[4] Chen L, Nagendra G R, Boys J T, et al. Double-Coupled Systems for IPT Roadway Applications[J]., 2015,3(1):37-49.
[5] Choi S, Huh J, Lee W Y, et al. New Cross-Segmented Power Supply Rails for Roadway-Powered Electric Vehicles[J]., 2013,28(12):5832-5841.
[6] Su Y C, Gu B W, Jeong S Y, et al. Advances in Wireless Power Transfer Systems for Roadway-Powered Electric Vehicles[J].2015,3(1):18-36.
[7] Ean K K, Kai S, Sukprasert P, et al. Two-transmitter Wireless Power Transfer With ICL Circuit for Continuous Power in Dynamic Charging[C]/ Emerging Technologies: Wireless Power. IEEE, 2015:1-6.
[8] Kobayashi D, Imura I, Hori Y. Real-time Coupling Coefficient Estimation and Maximum Efficiency Control on Dynamic Wireless Power Transfer for Electric Vehicles[C]// Emerging Technologies: Wireless Power. LEE, 2015:1-6.
[9] 王维,黄学良,周亚龙,等.双中继无线电能传输系统建模及传输效率分析[J].电工技术学报,2014,29(9):1-6.
[10]郭尧,朱春波,宋凯,等.平扳磁芯磁耦合谐振式无线电能传输技术[J].哈尔滨工业大学学报,2014,46(5):23-27.
[11]赵锦波,蔡涛,段善旭,等.适用于分段式动态无线充电的接力方法[J].电力系统自动化,2016,40(16):64-70.
[12]张献,金耀,苑朝阳,等.电动汽车动态无线充电紧一强耦合模式分析[J].电力系统自动化,2017,41(2):79-83.
Dynamic Wireless Constant Current Charging Method Based on LCC Parallel Topology and PI-PCB Control
XU Xiaoye
()
The paper proposes a parallel topology of LCC for dynamic wireless charging and a constant current control algorithm combining the passivity-based proportional and integral control(PI-PBC)The LCC parallel topology can make the transmitting and receiving coils have a relatively stable mutual inductance during the dynamic charging process. Combined with the PI-PBC control algorithm, a higher and more stable power output at the receiving end is realized. Thereby improving the charging efficiency and charging stability of the battery in the dynamic wireless charging process. The topology and method can be used on dynamic wireless charging platforms of different power levels.
wireless charging; power electronics; control theory
TM724
A
1672-0318(2022)03-0027-05
10.13899/j.cnki.szptxb.2022.03.004
2022-02-22
徐小野,男,山东胶南人,硕士,助理工程师,研究方向:新能源车静态和动态无线充电.
(责任编辑:王璐)
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
湖南电力(2021年2期)2021-05-08
科学技术创新(2021年7期)2021-03-23
纺织科学研究(2020年1期)2020-05-21
制造技术与机床(2017年6期)2018-01-19
网络安全与数据管理(2017年18期)2017-10-12
中学物理·高中(2016年12期)2017-04-22
文理导航(2015年14期)2015-05-22
舰船科学技术(2015年8期)2015-02-27
