基于半实物仿真飞行平台的飞行记录系统设计
2022-06-07 06:15:32王健张会新马银鸿李张倩
山西大学学报(自然科学版) 2022年2期
王健 ,张会新,马银鸿,李张倩
(1.中北大学 电子测试技术国家重点实验室,山西 太原 030051;2.仪器科学与动态测试教育部重点实验室,山西 太原 030051)
0 引言
目前国内对于半实物仿真飞行平台的研究已日趋成熟,其飞行视景仿真[1]、飞行仪表仿真[2]和六自由度模拟座舱[3]等组成部分发展正逐步完善,但基于PC环境的飞行记录系统[4]中的一些关键技术还有待加强。对于基于PC环境的飞行记录系统的研究,我们正处在“跳远前的一个深蹲状态”,起步迟、起点低是客观事实,但我们一直在为那纵身一跃铆着劲、蓄着力,国内数十家高校院所和科研机构长期扎根在虚拟现实领域的半实物仿真飞行平台及其相关设备研究,其中以中科院自动化研究所、哈尔滨工业大学、西北工业大学和北京蓝天航空科技股份有限公司(原工业部航空模拟器研究所)等单位为代表。2015年,哈尔滨工业大学翟健宏教授团队设计的飞行仿真平台采用了基于面向对象的技术,构建出Windows平台下应用程序,该平台具有良好的人机交互界面,实用性较强,但该平台仅是在视景仿真方面有所进展,并未搭载配套的记录系统,使得基于该平台的操纵行为量化分析缺少原始数据的支撑。2016年彭飞等人为了有效提升飞行训练评估的准确性,减少人为主观因素所产生的评估不确定性,提出了基于多元时间序列分解距离飞行数据模式匹配算法的飞行训练评估系统,但是该系统仅仅是依托与其他多元时间序列模式匹配算法的对比实验,并未采集到真实的模拟座舱操作组件的行为轨迹变化参数,相比于之前的飞行训练评估系统有了较大提升,但没有原始数据支撑的评估系统仅是个纯软件评估模型,仍具有较大不确定性。2020年北京蓝天公司自主研发的C919试飞仿真平台[5]具备试飞科目预测与复现、飞行包线与预定飞行点飞行、研发与适航符合性试飞训练、特殊试飞科目及标准任务飞行等功能,能够完整复现机载设备的功能、性能,在系统特性、操作方法、显示内容等多方面为飞行员提供逼真的操作显示界面,成功地为国产大飞机助力,该平台所搭载的软件存储模型在国内水平居前,但是与国外同等级的飞行仿真平台记录系统相比,所能记录的飞行参数类型远远不够。基于此,本文提出了一种基于半实物仿真飞行平台[6]的实用性较强、可靠性较高、通用性较好的飞行记录系统设计。
1 半实物仿真飞行平台系统设计
本系统通过ARINC664、离散量采集卡采集模拟飞行人员操作时的操作部件的位移[7]、按键、开关、告警灯等信息,分析采集数据的方位、操作次序,形成基本操作行为的特征的中间数据集,建立了用于模拟飞行人员操作动作采集所需的硬件设备和环境;集成了飞行仪表仿真、飞行员模拟操控、飞行视景仿真、飞行实时仿真功能;支持接入真实的飞控计算机,实现了“人在回路和飞控在回路”的同时验证,可作为飞控操纵参数调整的工程级验证设备使用[8]。系统总体结构设计如图1所示,系统硬件平台组成如图2所示。

图1 系统总体结构设计Fig.1 Design of the overall structure of system

图2 系统硬件平台组成图Fig.2 Diagram for the composition of hardware platform system
2 系统模型设计及相关通信协议设计
本系统可实现快速控制原型(仿真回路不加入飞控计算机、IMU(Inertial Measurement Unit,惯性测量单元)/GPS(全球定位系统)、舵机等硬件,只用六自由度运动平台来演示飞行器姿态信息)和硬件在回路(仿真回路加入飞控计算机、IMU/毫米波雷达、舵机等硬件,配合RT-Sim PLus管理环境中的仿真工程[9]实现目标机状态监测、在线修改参数[10-11]、启停控制、软件实时存储功能)两种形式的仿真。
2.1 基于Simulink的模型设计
系统通过MATLAB/Simulink图形化建模工具结合Links-RT仿真软件包进行Simulink下的数学仿真,以便在添加IO模块之前实现对模型及算法的初步验证;模型设计后,调用代码生成工具,将Simulink模型转换为C代码,再编译为.out可执行程序;执行完毕后在RT-Sim PLus管理环境中,根据软件向导,建立仿真工程,设置仿真目标机属性,配置监视及保存变量;点击启动后仿真开始,代码自动下载到目标机,并启动实时运行,与真实设备通过IO硬件进行交互,实现硬件在环半物理仿真。从建模到硬件在环仿真的流程步骤如图3所示。

图3 半物理仿真流程图Fig.3 Flow chart of semi-physical simulation
2.2 六自由度运动平台设计
本设计中六自由度运动平台采用刚度大、承载能力强、位置误差不累计的Stewart结构,基本组成包括两个平台和六根支撑杆。其中一个平台为固定的“基座”(也称下平台);另一个是可移动平台(也称活动平台,上平台)。两平台之间由六根支撑杆以并行方式相连,每个支撑杆的两端与两平台上的受动关节相连。每根支撑杆的末端装有驱动器,通过同步带传动驱使支撑杆伸缩,完成上平台在三维空间六个自由度(X,Y,Z,α,β,γ)的运动,从而模拟出空间各种运动姿态。图4为六自由度运动平台模型示意图,图5为系统测试现场六自由度运动平台实物图。

图4 六自由度运动平台模型示意图Fig.4 Schematic diagram of six-degree-of-freedom motion platform mode

图5 系统测试现场六自由度运动平台实物图Fig.5 Physical image of the six-degree-of-freedom motion platform at the system test
2.3 ARINC664 Part7通信
ARINC664规范是基于IEEE标准的用于定义安装在飞机上的以太网数据网络最新标准,它被发展为多个部分,其中Part7是航空电子全双工交换式以太网网络。由于在多终端系统中,点到点的布线是主要的开销,本系统采用ARINC664通信来模仿点到点的连接,为飞行仿真平台提供了一个合适的确定性网络通信模型,以此来保障系统从源端到接收端数据传输的实时性和完整性[12-13]。
本系统中软件存储模型通过ARINC664模块与模拟座舱操控输入信息(如飞行摇杆、油门杆、开关控制面板、飞行脚舵等模拟指令的输入)和实时仿真机中的VxWorks仿真模型(如运行飞行器动力学、传感器及大气环境等模型)进行数据交换和传输,本设计中AFDX[14]数据传输帧结构如表1所示。

表1 ARINC664数据传输的帧结构Table 1 Frame structure of ARINC664 data transmission
3 系统存储模型设计
本设计中存储模型通过ARINC664总线连接各成员设备之后,通过信号发生函数产生不同的参数数据,为了尽量模拟测试参数的逼真度,对其进行了加噪处理。存储模型接收端口通过总线采集数据的同时根据参数类型对不同的参数采取不同的滤波算法进行滤波处理;预编码单元对处理后信号数据[15]通过预编码进行打包组帧;压缩编码单元继续对其压缩编码以减少数据传输和存储容量。具体参数类型[16]见表 2,数据存储容量为 256 GB,连续存储时间不小于4 h,存储模式为循环式覆盖存储;图6所示为存储算法流程图。
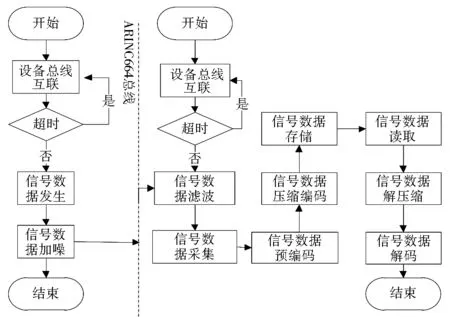
图6 存储算法流程图Fig.6 Flowchart of storage algorithm
4 系统测试
一键启动飞行平台后,存储模型软件进入启动首页并自动进行设备连接,消息列表显示“设备连接成功”,图7所示为存储模型启动首页。
进入模飞人员操作阶段后硬件采集设备开始进行数据采集,软件存储模型通过ARINC664模块对模拟座舱操控输入信息和实时仿真机[17]中的 VxWorks[18]仿真数据共计 55种飞行参数(参数种类如上表2中所示)进行实时监测和记录,其中将仿真模型中的经纬度依次配置为 338.330°、298.959°。本次测试中,存储模型配置本地IP为127.0.0.1、当前端口为53417、目的IP为234.5.6.7、目的端口为53418。图8所示为飞行数据实时监测界面,图9所示为仿真平台飞行数据记录界面。

图9 仿真飞行数据记录界面Fig.9 Recording interface of simulation flight data

表2 飞行数据记录的参数单词尾加“S”表Table 2 Parametes of flight data record
图8中飞行经度显示为337.436°,飞行纬度显示为298.169°,剩余参数不一一列举,依次与配置值对比,可以判定本系统实现了PC环境下的半实物仿真飞行平台飞行参数测试,为模飞员操作行为告警软件的开发、告警级别和告警类型的设置及操作行为预警规则的制定提供了对标于飞机黑匣子的原始数据支撑,对基于VR/AR技术的半实物仿真飞行平台的发展具有较大意义。

图8 仿真飞行数据实时监测界面Fig.8 Real-time monitoring interface of flight data
5 结论
本文提出了一种基于PC环境的半实物仿真飞行平台飞行记录系统设计,飞行平台一经启动,系统自动连接并对55种飞行仿真数据进行实时监测并循环记录,改变了现有的将模飞员的操作行为进行简单分析、归类、编码后,通过与设定标准编码库数据进行查询、比对及时间线匹配的概略评估方式,系统记录的全面有效且可量化分析的数据为单人飞行训练、空战模拟对抗训练提供了事后精准判读方式,为半实物仿真飞行平台的飞行训练及评估提供了权威“裁判”。
猜你喜欢
童话王国·奇妙逻辑推理(2024年5期)2024-06-19 16:03:38
中学生数理化·中考版(2022年10期)2022-11-10 09:37:34
中学生数理化·七年级数学人教版(2020年10期)2020-11-26 08:24:50
数学物理学报(2020年2期)2020-06-02 11:29:24
作文小学中年级(2018年10期)2018-10-29 02:06:50
电子制作(2018年1期)2018-04-04 01:48:26
科技创新与应用(2018年35期)2018-02-28 10:36:54
山东工业技术(2017年19期)2017-09-27 11:47:10
光学精密工程(2016年6期)2016-11-07 09:07:19
湖南农业(2016年3期)2016-06-05 09:37:36