
基于声学摄像机的养殖池塘南美白对虾资源量评估
2022-06-06 07:08彭战飞曹正良廖德亮
渔业现代化 2022年2期
沈 蔚,彭战飞,张 进,曹正良,廖德亮
(1 上海海洋大学 海洋科学学院,上海 201306;2 上海河口海洋测绘工程技术研究中心,上海 201306)
虾类养殖业在全球渔业中占有十分重要的地位[1],随着现代渔业养殖工业集约化的发展,虾类资源探测与评估成为集约化养殖的关键环节。由于养殖池塘的条件及虾类底栖行为使得虾类资源评估变得十分困难,而当前养殖池塘虾类资源评估多采用养殖经验估计,误差较大。因此,研究养殖池塘虾类资源量探测与评估新方法,对虾类渔业养殖的集约化发展具有重要的意义。
南美白对虾(Litopenaeusvannamei)作为中国养殖水产品典型的代表性物种[2],一直以来研究主要集中在南美白对虾的生物学属性,对其资源量的评估涉及极少[3-6]。随着虾类渔业养殖逐渐趋向智能化,虾类渔业资源量评估成为研究的重点,评估方法不断发展。早期主要是利用浮游动物干重评估法[7]和生产量/生物量比例系数转换评估法[8]评估虾类渔业资源量,而中期则是利用站点取样法[9]和网具拖网法[10]对虾类渔业资源量调查及资源量的年际变化进行研究。这类传统的虾类渔业资源量评估方法,既耗费人物力,又损虾类渔业资源。20世纪70年代研制的分裂波束式回声探测仪,其利用回波积分或回波计数法对虾类渔业资源量进行评估[11],具有方便快捷、对水生物无损害、效率高效等优势[12-14],并逐渐成为水生物资源调查的重要方法之一[15]。但这种回声探测仪主要利用回波强度(Target strength,TS)进行估算,回波信号投影形成声学图像精度很低,水平方向上声呐波束宽度大于5°(-3 dB时),目标在距离上的测量存在很大误差[16]。
近年来,一种新型利用声透镜发射独立波束形成声学影像的多波束系统—声学摄像机(Dual-Frequency Identification Sonar, DIDSON[17]),因其能够在浑浊、黑暗的水体环境显示高清晰度声学影像,被广泛用于渔业管理、结构监测、水底探测、水下安检等领域[18]。在渔业资源管理方面,DIDSON广泛用于河流、湖泊、水库等内陆水域鱼类计数、行为观测等[19]。养殖池塘虾类渔业资源评估方法可能会从鱼类资源评估开发的方法中受益,但尚未发现DIDSON关于水产养殖池塘中虾类渔业资源评估的研究。
本研究开发一种适用于养殖池塘南美白对虾目标识别并评估其资源量的方法,即利用无人船搭载DIDSON在养殖池塘内扫描探测航线范围内的南美白对虾,针对南美白对虾的声学成像构建目标识别计数模型,分析南美白对虾数量、体长和体质量,从而估计养殖池塘南美白对虾渔业资源量。
1 材料与方法
1.1 研究区域与航线设计
研究区域为上海市奉贤区某养殖池塘,为长170 m,宽60 m的矩形封闭水域,横剖面为倒梯形,边缘浅,中间深,底部平坦。由于常规池塘工作船吃水深、引擎噪声干扰大而影响虾群行为无法进行声学探测。特设计无人船搭载DIDSON探测系统进行南美白对虾声学数据采集,DIDSON安装在无人船下,无人船及设备安装示意如图1所示。
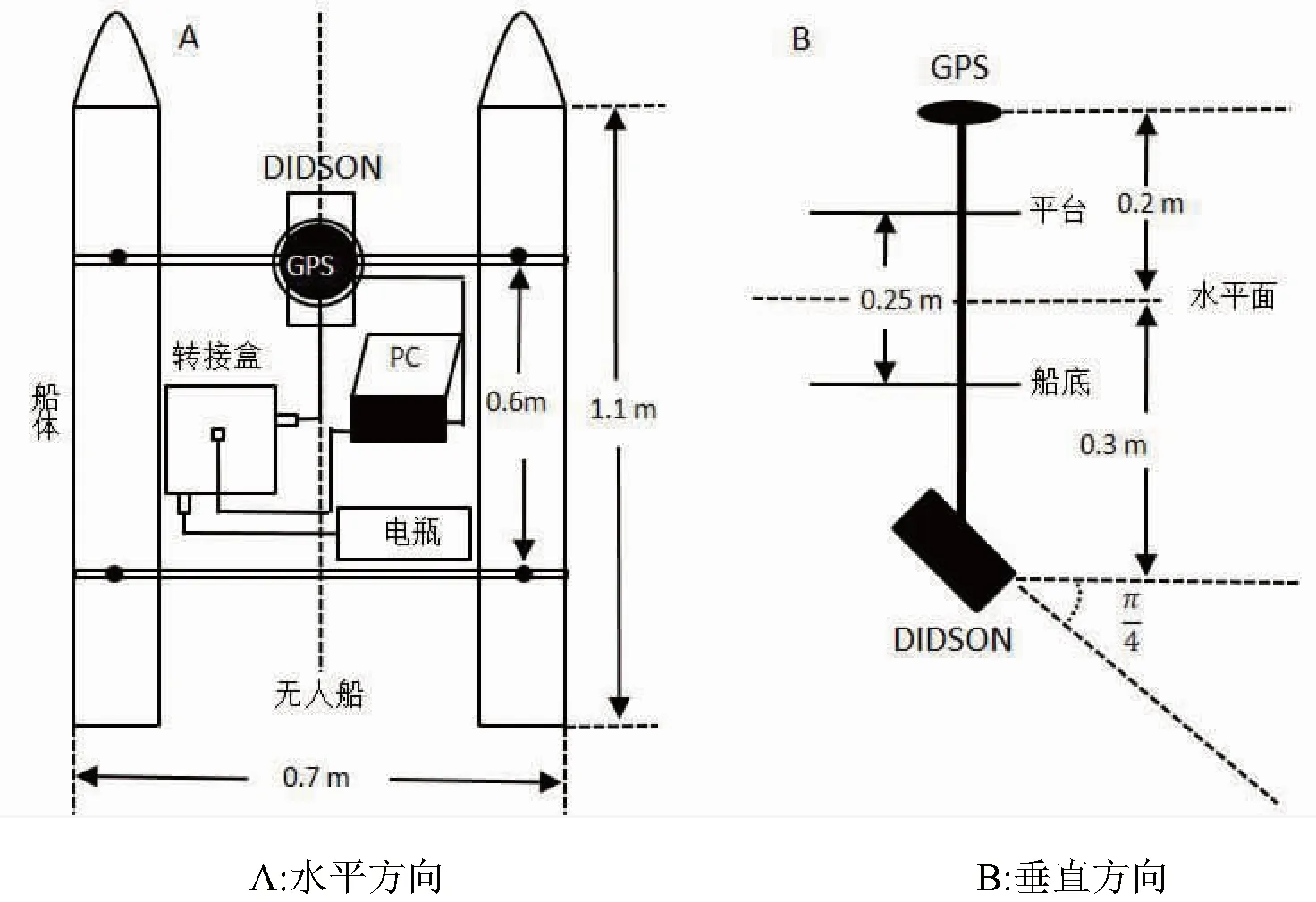
图1 调查设备及安装示意图
调查实际航迹图如图2所示。

图2 无人船声学调查航线
2020年9月8日,采用无人船搭载DIDSON探测系统进行“平行断面”形水声学调查,由图中A起点开始调查,调查时间36 min,无人船时速为0.5 m/s,无人船匀速运动,断面间隔距离为10 m左右。声学调查前关闭池塘饲养设备和停止一切池塘活动,确保池塘处于自然状态,无外界环境干扰。调查期间,天气晴朗,水面无风。
1.2 DIDSON声学设备
DIDSON是美国华盛顿大学与Sound-Metrics公司研发制造的声学摄像机,其利用声镜头通过声波聚焦形成非常狭窄的扫描波束来进行测量并生成高清晰度画质的影像,具有高分辨率和快刷新率(见表1技术参数),可以代替光学系统用于黑暗浑浊能见度很低的水中。标准型DIDSON有两种工作模式,分别对应仪器不同工作频率,即低频探测模式和高频识别模式,本研究由于小型虾类需要高分辨率测量而使用DIDSON高频识别模式。声呐主要技术参数如表1所示。
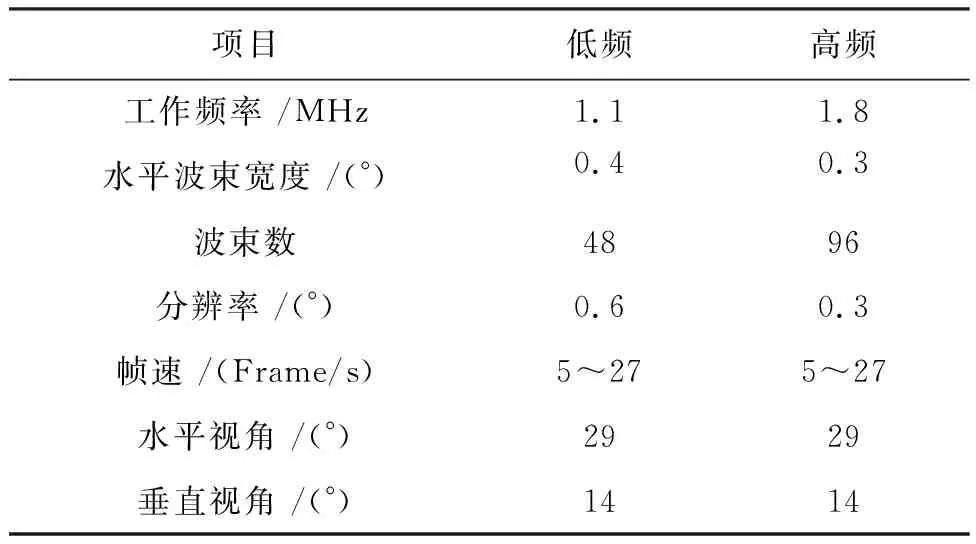
表1 DIDSON主要参数
1.3 数据分析
1.3.1 目标识别计数模型
ECHOVIEW渔业声学后处理软件是由澳大利亚ECHOVIEW SOFTWARE公司研发,已成为渔业声学研究的主流软件并支持DIDSON的数据处理。本研究基于ECHOVIEW的模块功能开发南美白对虾目标识别计数模型,模型计算分析流程图如图3所示。

图3 南美白对虾目标识别计数模型流程图
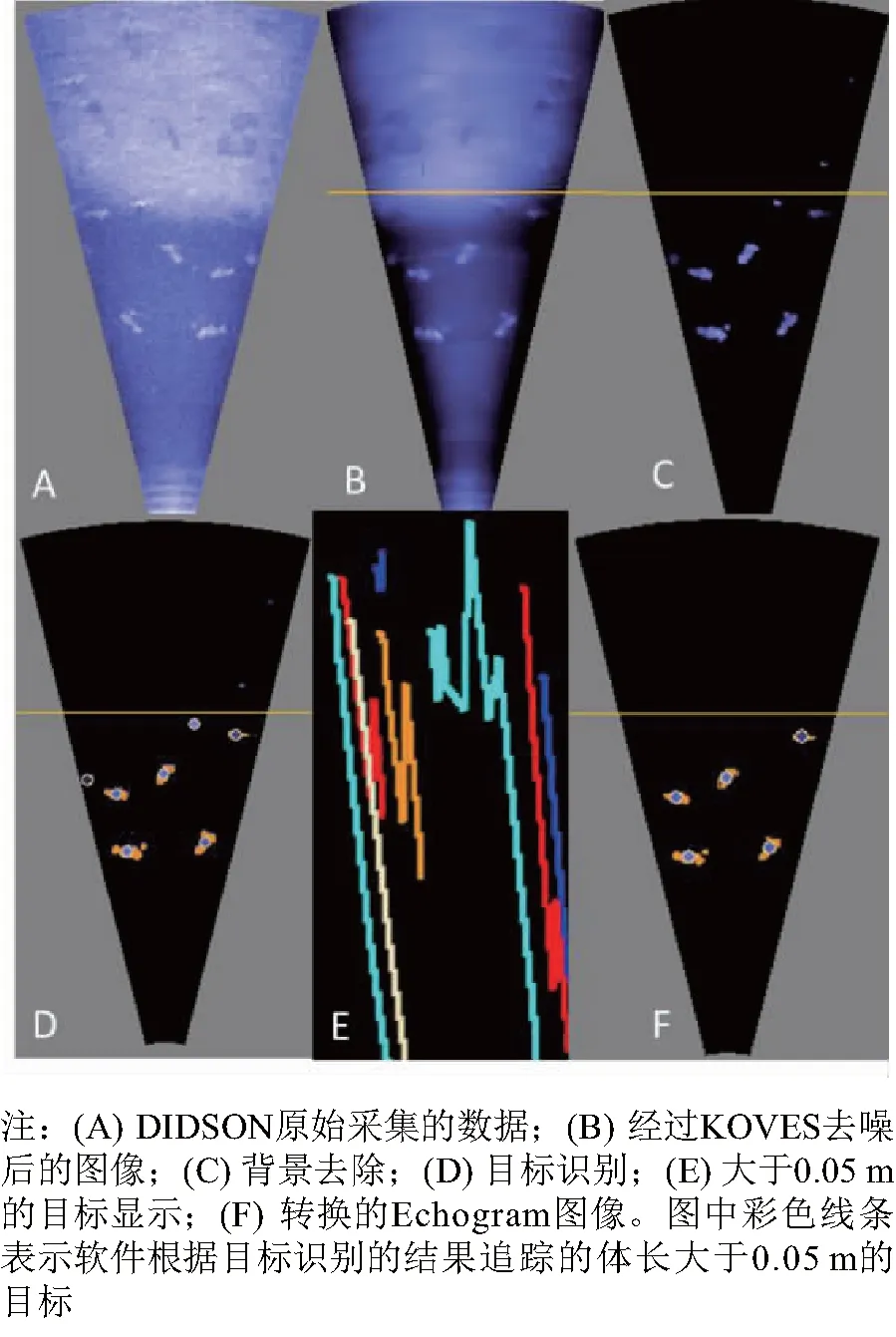
图4 南美白对虾目标识别计数模型处理效果示例
目标识别计数模型主要步骤如下:
(a)数据整合:南美白对目标识别计数模型解析原始文件,逐帧拼接成连续的时序图像(图4A)。
(b)噪声去除:主要分为人工目视去除噪音、样本静态去噪和背景去除。人工目视去噪是通过后向散射强度回放数据,判断伪样本值(Sample value,Sv),去除非目标。样本静态去噪采用KOVESI图像滤噪法[20]进行噪声去除,保留其视觉感知中最重要的图像相位信息,过滤原始数据中的泥土、植被残体、声学伪影等背景(图4B)。背景去除采用中值滤波算法和信噪比阈值滤波算法去除背景(图4C)。
(c)多波束单目标检测:多波束目标识别原理是设定目标回声阈值区间[a,b],并判断回声图像中每个像素值(Pixel values,Pv)(x,y)是否在阈值区间[a,b]当中,若在区间当中,即用创建的多波束目标Sv来代替或标注符合要求的Pv(x,y),从而实现声呐图像目标的识别[19](图4D)。多波束目标转化是将DIDSON图像拼接成Echogram图像并对DIDSON图像中的目标进行轨迹追踪,使用α-β 轨迹追踪算法对声学影像中南美白对虾进行识别追踪,追踪结果以不同颜色的线条显示,算法采用固定系数滤波,固定系数α和β分别控制追踪目标位置和速度的变化。原理为:利用前一时刻状态量估计当前时刻的状态量,并与之相对比。其算法方程式如下所示[21]:
(1)
(2)
位置和速度的预测值为:
(3)
(4)

在同一运动轨迹上的每一帧图像中提取目标体长[22],而在水平方向运动时体长最大且接近真实值,并提取为体长值。目标体长阈值设置包括目标属性类型(目标长度横穿波束)和最小阈值(大于0.05 m),最终提取单目标体长(图4F)。
1.3.2 体长分析方法
由于DIDSON分辨率的限制和噪音的干扰,小规格个体(体长小于5 cm)难以识别,同时考虑本次探测时间为秋季,出塘期南美白对虾体型普遍较大,故设定输出目标最小阈值为5 cm。网捕数据中未发现体长超过25 cm,为了便于统计分析,故将体长区间设定为5~25 cm,划分为4个统计区间进行分析。
1.3.3 资源量估算

(5)
(6)
(7)
mi=S×ρ×σi
(8)
(9)
式中:h表示平均探测距离(m),hi表示为每条波束与水底交点到声呐的直线距离(m),n表示为波束总数;li是航线的长度(m),Si表示声呐从A点移动到B点对应探测面积(m2);N表示为南美白对虾目标分析模型提取数量值(ind),ρ表示为养殖池塘南美白对虾平均密度(ind/m2);mi表示区间内数量(ind),S表示为养殖池塘面积(m2),σi表示为南美白对虾区间数量比值;Y表示南美白对虾总资源量(kg),yi表示区间内平均体质量(kg)。

图5 声呐探测水域面积
1.4 南美白对虾渔获物方法
在南美白对虾渔业资源调查期间,池塘养殖人员采用长5 m×宽5 m网具(网眼对角线5 cm)进行随机捕捞,所有渔获物带回实验室进行分析。
2 结果与分析
2.1 南美白对虾数量统计
网捕南美白对虾统计数量为30 ind,渔获物中大规格个体(体长>10 cm)数量占比为80.6%,其中体长最大值为15.5 cm,均值为12.9 cm,方差为8.53 cm2。体质量最大为28.7 g,均值为17.4 g,方差为68.72 g2。
2.2 南美白对虾体长
体长是衡量虾类生长的重要指标之一,体长区间概率在一定程度上反映虾类的生长情况,南美白对虾目标识别计数模型自动提取其体长分布如图6所示,大规格个体(体长>10 cm)数量占比为78.2%。

图6 体长分布图
2.3 体长体质量关系
利用南美白对虾渔获物体长和体质量数据进行线性拟合(图7),幂函数线性拟合效果较为理想,拟合相关系数为0.895,体长和体质量关系式:y=0.015 8x2.691,x表示体长(cm),y表示体质量(g)。
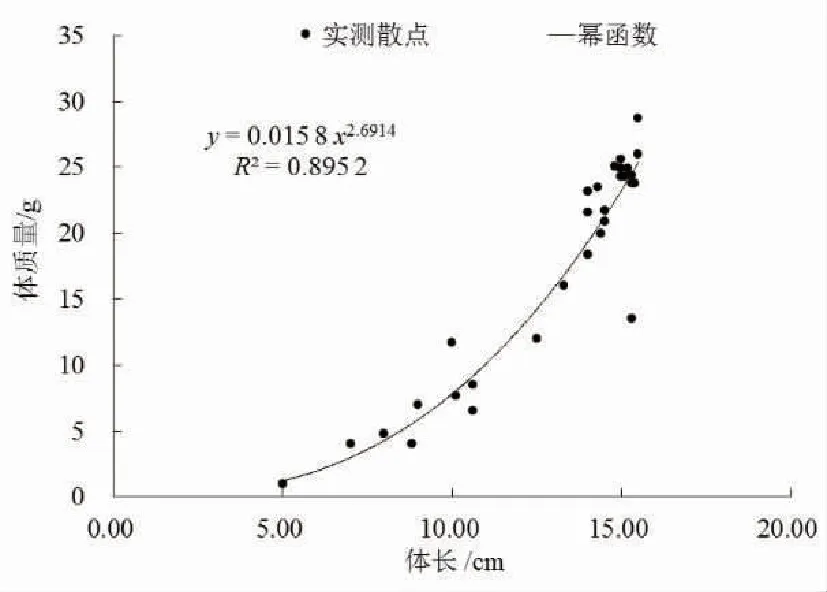
图7 体长体质量拟合曲线图
2.4 养殖池塘资源量评估
南美白对虾水面的平均密度为7.39 ind/m2,根据池塘面积估算南美白对虾数量74 378 ind,资源量估计为1 415 kg(表2)。
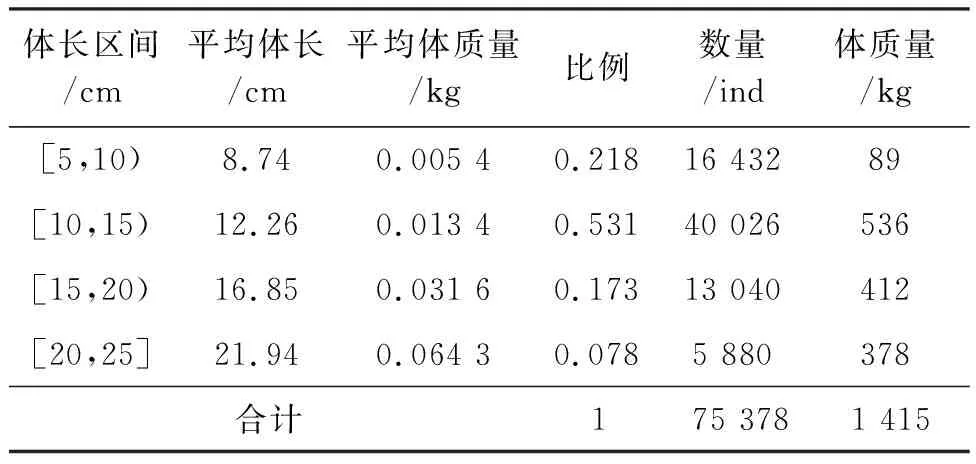
表2 南美白对虾资源总量
2.5 统计误差
为验证ECHOVIEW软件计数的准确性,对DIDSON原始图像进行了人工目视计数。人工目视计数即通过DIDSON软件进行数据回放,逐帧记录图像中南美白对虾体长大于5 cm的数量。表3中软件计数误差为8.47%,表明南美白对虾目标分析模型具有可观的精度。同时统计养殖池塘捕捞记录,养殖池塘实际体质量为1 303 kg,声学评估结果与实际捕捞量误差为8.63%。
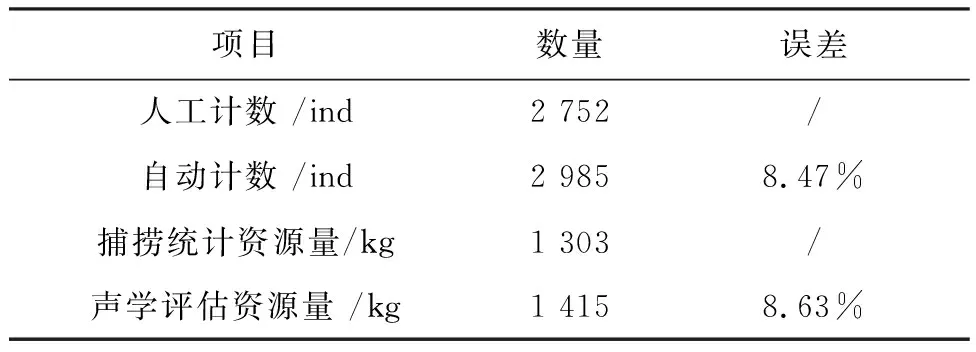
表3 误差统计表
3 讨论
3.1 南美白对虾体长测量
利用ECHOVIEW构建南美白对虾目标识别计数模型实现其体长自动提取,其中体长大于10 cm占比为78.2%。南美白对虾渔获物中体长大于10 cm占比为80.6%,这与声学探测结果呈现相同趋势,这也验证了DIDSON探测方法的有效性和目标识别计数模型的准确性。研究提供了一种南美白对虾体长测量的新方法,相对于养殖经验估计法、体长体质量线性模型[23]和网捕实测等方法具有方便性、快捷性和精度高的优势。目标体长作为生物资源量评估的重要参数,体长-体质量关系也是渔业生态学研究的常用公式之一[24],但本研究建立的目标识别计数模型提取的体长与实际体长存在误差,误差的范围大小尚未进行验证,后续将完善该工作,以进一步提高提取精度。
3.2 池塘内南美白对虾资源量评估
开放水域虾类渔业资源传统调查方法以网具采样为主,使用的网具包括底拖网、张网、定置网[10,25]等,而传统网具采样方法与声学调查相结合正成为生物资源量评估的主流趋势[26]。本研究采用DIDSON声呐探测法对池塘养殖南美白对虾资源量进行探测与评估,目标识别计数模型计数误差为8.47%,体质量评估误差为8.63%,具有相对较高的评估精度,可以作为池塘虾类资源评估的一种手段,并为开放的低能见度水域虾类渔业资源评估提供了可借鉴的新技术手段和方法。但是,由表4可以看出,软件自动计数和声学评估资源量与真实值相比,结果被高估,南美白对虾目标识别计数模型的轨迹追踪算法误差造成目标重复计数是其主要原因;而模型将未剔除伪目标识别为南美白对虾目标,造成误识别计数也是其原因;另外人工目视计数的视觉疲惫造成目标少计或者漏记等人为因素误差[27]也是一方面原因。在声学评估资源量的计算上,多数物种在陆地和海洋生态系统中具有聚集分布[28]的特征,而本研究利用水面平均密度法估算南美白对虾渔业资源量,其分布的非均匀性和位置的动态化造成平均密度法具有一定的局限性,进而会影响资源量的评估。而在南美白对虾实测体长和体质量数据进行幂函数线性拟合实验中,体长体质量样本数据较少可能也会造成其资源量的评估误差。目前生物资源量评估误差分析工作是接下来研究的重点,并研究如何进一步提高评估精度。
3.3 声学评估的适用性
目前DIDSON广泛地应用在渔业资源定量评估、体长研究和种类鉴别等方面[29-30],同时在未来对于了解资源量现状、调查生物与环境之间的相互影响仍然是精确高效的手段[31]。DIDSON作为高分辨率的识别声呐,其成像特性直观地映射水下目标,结合无人船评估养殖池塘南美白对虾渔业资源量,是一次有意义的尝试。DIDSON声呐探测法的成功应用,为虾类渔业资源探测与评估提供了新方法,但由于声呐成像的特性和虾类的水下集群习性,声呐图像中对虾会出现重叠现象[32],导致目标提取出现误差,需在后续算法模型中进行改进。
无人船运动速度便于操控,不会因声呐移动速度过快而出现锯齿状轮廓[33],从而减小了南美白对虾渔业资源评估误差。无人船监测系统已经应用于海洋渔业养殖研究当中[34],而本研究设计无人船搭载DIDSON探测系统安装简单、便于操作、方便快捷,浅水作业能力强等优势[35],也极大增加了DIDSON水声评估的应用性。
4 结论
基于无人船搭载DIDSON探测系统实现了养殖池塘南美白对虾渔业资源评估,为虾类提供了一种新的声学探测方法,同时DIDSON声学评估可以提供了长时间收集虾类行为信息,为进一步研究虾类水下行为提供可靠的观测方法。ECHOVIEW声学数据后处理软件及其相关算法为虾类渔业资源评估提供了新的技术手段,提高了虾类渔业资源的评估精度。但后续研究将继续研究水下虾类目标的自动提取算法,特别挖掘人工神经网络、全卷积神经网络、随机森林算法模型等机器学习方法在声呐图像处理中的潜力,进一步提高声呐图像目标提取的精度。
□
猜你喜欢
当代水产(2022年8期)2022-09-20
天天爱科学(2022年9期)2022-09-15
当代水产(2022年6期)2022-06-29
当代水产(2022年1期)2022-04-26
当代水产(2022年3期)2022-04-26
农民致富之友(2019年10期)2019-05-22
价值工程(2017年8期)2017-03-25
电子技术与软件工程(2016年20期)2016-12-21
河北渔业(2015年10期)2015-10-15
河北渔业(2015年4期)2015-04-20
