
一种无模型终端滑模桥式起重机的控制方法
2022-06-02 13:05:20王天雷郑昭明李俊辉周京刘人菊古少伟
五邑大学学报(自然科学版) 2022年2期
王天雷,郑昭明,李俊辉,周京,刘人菊,古少伟
(1.五邑大学 智能制造学部,广东 江门 529020;2.北京交通大学 机械与电子控制工程学院,北京 100044)
桥式起重机具有优良的运输性能,被广泛应用于各个行业[1-3]. 起重机工作过程中台车加减速运动将会导致负载摆动,从而增加事故发生率. 目前采用人工操作的方式以实现货物的安全运输和卸载,然而在一些较高精度要求的运输任务中,仅靠人工操作难以实现台车的精准定位和负载残余摆角的抑制.
为解决上述问题,近年来国内外学者对桥式起重机系统的控制算法展开了深入的研究[4-7],其中滑模控制方法由于具有良好的跟踪性能和鲁棒性,被广泛应用于桥式起重机系统的抗扰控制. Wang等[8]提出了一种时变全局滑模控制方法,使得系统在初始状态便处于滑模面上,克服了传统滑模面仅在趋近阶段才具有鲁棒性的缺点. Yang 等[9]提出了一种分层全局终端滑模控制方法,能实现台车的精确定位和负载的快速消摆. 在文献[10]中,Gu等提出了一种基于时变增益扩展状态观测器(ESO)的移动滑模控制方法,所设计的滑模面可根据状态变量误差实时调整斜率,从而提高了起重机系统的鲁棒性. 文献[11]中,Zhang 设计了一种有限时间轨迹跟踪控制器,该控制器能够实现台车的平滑启动,削弱了传统滑模控制的抖震现象. 在文献[12]中,Wu 等设计了一种带有扰动观测器的连续全局滑模控制器,用于桥式起重机系统的调节和扰动估计控制. 然而,现有滑模控制方法大多是基于模型设计的,控制律中包含物理参数信息,因此对系统参数变化较为敏感,无法满足工程实践要求.针对上述问题,本文引入自适应技术和非奇异终端滑模控制方法,提出一种无模型自适应终端滑模控制方法,以期解决复杂工况下桥式起重机的鲁棒控制.
1 问题提出
桥式起重机系统的示意图如图1所示,其动力学方程[13]如下:
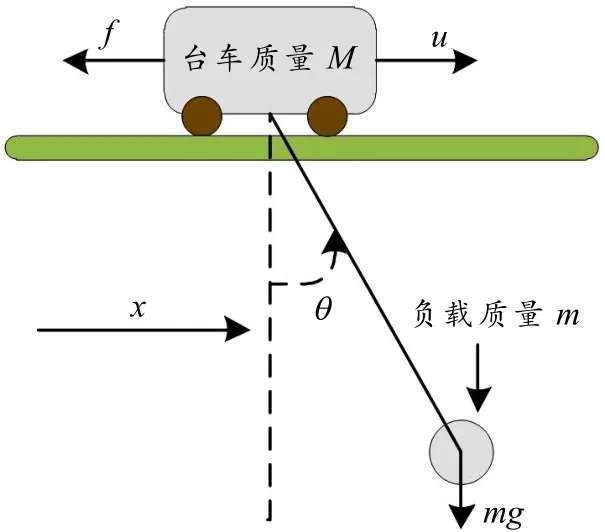
图1 桥式起重机物理模型图

其中,M 和m 分别代表台车和负载的质量,u 表示台车在水平方向的驱动力, f 代表台车与水平轨道之间的摩擦力. x 和x˙分别代表着台车的水平位移和加速度,θ、θ˙和θ˙分别代表负载的摆角、角速度以及角加速度,l 代表着绳索的长度.
从式(1)和式(2)可以看出,作为典型的欠驱动控制系统,桥式起重机系统有x 和θ 两个状态量,但只有一个控制力u.考虑到起重机系统的实际工作情况,不失一般性,做出如下假设:在运输负载至目标位置的过程中,其摆角θ 始终保持在 π/2-至π/2 之间,即:

为了便于后续控制器的设计,对桥式起重机动力学模型转换,并对部分反馈线性化处理可得:

控制目标是使台车快速、精确地到达目标位置 fx ,同时充分抑制负载摆动并消除残余摆角,即:

本文将设计一个无模型自适应终端滑模控制器来实现式(6)中所描述的控制目标.
2 主要结果
2.1 运动轨迹方程
针对传统控制方法无法保证台车平滑启动的问题,引入一条台车运动轨迹方程[14]:


因此,本文所设计控制器的控制目标可以转化为:

2.2 控制器设计
为了达到式(9)中的控制目标,构造如下滑模面方程s[15]:



2.3 稳定性分析
以下将证明所设计的无模型自适应非奇异终端滑模控制器(11)能保证控制系统的渐进稳定性.
证明定义如下Lyapunov 能量函数

3 仿真实验与分析

为了验证本文控制方法的有效性及鲁棒性,本文将仿真实验分为两组. 在第一组仿真中,将本文方法与线性二次型(LQR)控制方法、增强耦合(EC)控制方法[16]对比,验证本文方法优良的防摆定位性能;第二组实验通过改变系统的物理参数来进一步验证本文方法针对模型参数信息变动的鲁棒性. 为了保证论文叙述的完整性,LQR和EC控制器的具体定义如下:


表1 各控制器的控制增益
在相同的仿真实验条件下,3种控制方法的性能对比如图2所示:1)从图2-a可以看出,相比于其他两种方法,本文方法能够使台车更快地到达期望的位置. 2)从图2-b可以看出,本文方法对于负载摆动的抑制效果最好(最大摆角约为2°),且最快稳定. 3)从图2-c不难发现,本文方法能够使台车平滑启动,且驱动力的最大幅度显著小于其他两种方法. 由此可见,本文方法能够快速实现负载的定位消摆,且起始驱动较小,具有良好的控制性能.

图2 第一组仿真实验结果
为验证本文提出的控制器(11)具有较强的鲁棒性,在仿真实验2中,系统物理参数的名义值和控制增益与仿真实验1 中相同,而动力学模型中的系统参数产生摄动,其实际值为:
从图3-a明显看出,在系统物理参数摄动的影响下,本文控制器依然保持着优越的控制性能,能够快速实现台车的定位跟踪,而另外两种控制器的收敛速度较慢;从图3-b中不难得到,相比于其他两种控制器,本文控制器控制下的负载最大摆角明显较小;从图3-c中可以看出,本文控制器的驱动力最快收敛至零,这表明了本文控制方法具有快速镇定和能耗少的优点.
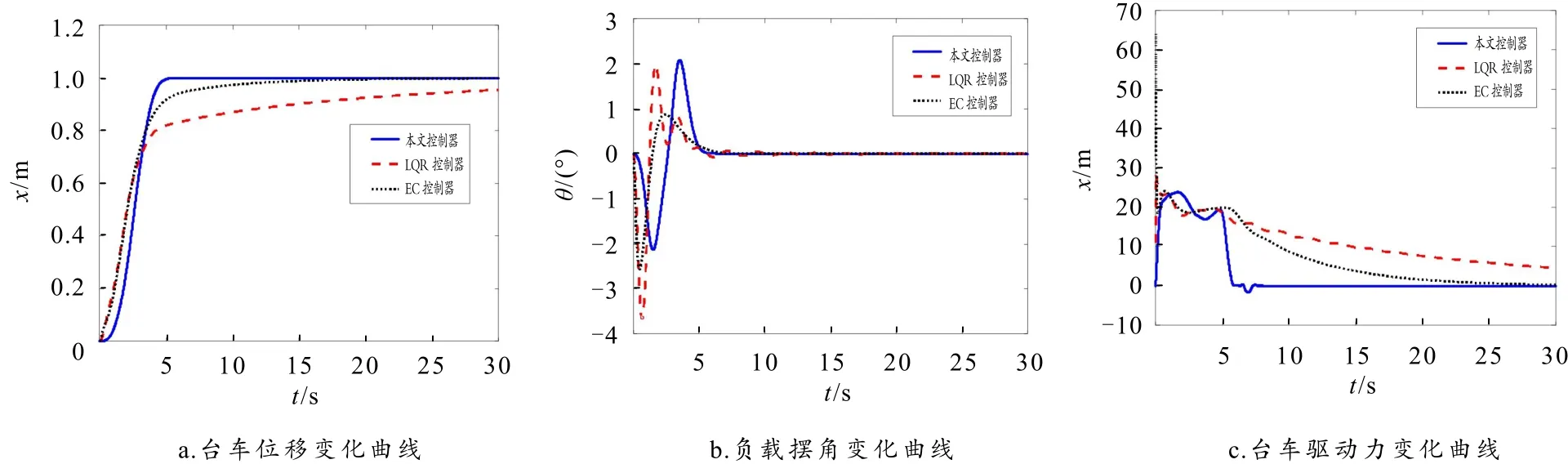
图3 第二组仿真实验结果
4 结论
为解决桥式起重机系统参数多变所导致的系统控制困难,本文提出了一种无模型自适应终端滑模控制方法. 该控制器利用自适应策略,提高了系统对于物理参数摄动的鲁棒性. 仿真结果表明,本文方法可以使台车快速到达指定位置同时有效抑制负载摆角,并能够确保控制器的鲁棒性. 但由于起重机工况复杂、干扰多变,未能将本文控制方法进行实物验证. 下一步计划将设计干扰观测器来补偿外界干扰,并构建更精准的摩擦力模型应用于实物平台. 同时,本文方法有望推广到其他欠驱动机电系统的鲁棒控制当中.
猜你喜欢
山东冶金(2022年2期)2022-08-08 01:51:54
昆钢科技(2020年6期)2020-03-29 06:39:32
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
铁道通信信号(2019年2期)2019-03-26 06:39:58
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
工业炉(2016年1期)2016-02-27 12:34:13
西部广播电视(2015年17期)2016-01-18 03:46:23
中国交通信息化(2015年1期)2015-06-05 03:43:32
