
基于STEAM机器人的创新实践模式研究
2022-05-30 10:39:10李真
电脑知识与技术 2022年27期
李真

摘要:当前的编程教育实践过程中,编程语言较为枯燥,多数学生对编程语言的学习兴趣和自信心不足。针对教学需求,设计了一套“低碳环保”机器人实验教学平台,该平台以WER(世界教育机器人大赛)比赛为基础,将图形化编程技术引入到学生编程教育,使得学生更加直观地掌握代码编程技能,该平台包含各种电子模块的底层驱动支持,以便学生在其基础上控制各类硬件外围设备,开展创新创意项目实践。实践证明该平台具有良好的直观性、综合性和扩展性,不仅满足了学生对软硬件开发系统的学习需求,而且对大学生科技创新活动具有良好的促进作用。
关键词:图形化编程;机器人;实践教学
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2022)27-0116-03
开放科学(资源服务)标识码(OSID):
1 引言
近些年来不断倡导的STEAM教育理念,鼓励孩子在科学(Science)、技术(Technology)、工程(Engineering)、艺术(Arts)、数学(Mathematics)领域的发展与提高,培养孩子的综合素养,从而提高其全球竞争力[1]。STEAM教育明确培养学生的三类技能,包括认知技能、沟通合作技能和创新技能[2]。其中,创新技能是将创新思维转变为创新成果的中介,包含設计、构图、表演、展示、建模等[3],需要为学生提供丰富的探索和实践机会,并在问题解决情景中提供概念、工具、经验等,从而培养学生的创新技能。
在STEAM教育中,编程也作为思维训练的一项重要内容被各界所广泛认可。学习编程能培养抽象思维、逻辑思考、专注细心、创造力等能力,还能提高孩子的学习习惯和综合素养[4]。随着机器人、人工智能技术的发展,编程将成为时代的基本需求。编程教育不是为了培养程序员,而是培养未来一种基本的生存能力。
目前大多数高校都开展了C语言等程序设计类课程,但长期的教学实践过程表明,学生学习编程语言的兴趣和动力不足,解决实际问题的能力没有明显提高,动手能力和创新能力也不强[5-6]。近些年来图形化编程逐步走进大众的视线。实践证明,图形化编程的引入有利于学生快速掌握基础的编程思想,获得编程的兴趣,并在此基础上逐渐掌握代码编程技能。基于此本文设计了一套“低碳环保”机器人实验教学平台,不仅可以满足纯软件类的编程学习,而且能够与硬件结合,满足电气自动化类大学生对软硬件一体化系统的学习需求。
2 平台整体设计
2.1 图形化编程软件
在图形化编程中,构成程序的命令和参数通过积木形状的模块来实现,直观明了,简单易学。编程采用的是AbilixChart3.0图形化编程软件,如图1所示。按照任务的需求编程主要分为巡线、图像识别、运动控制等。其中巡线的稳定性是任务完成的最关键保证,决定着小车能不能顺利达到任务点;图像识别主要用来通过摄像头完成物体的识别;运动控制主要是控制电机带动机械臂来完成推拉、旋转等动作。在此基础上对任务从易到难一个一个进行挑战,最后将所有程序进行相连,进行整体的调试。在编写的过程中,发现程序较长,可以将重复的动作进行整理和打包编写为子程序,用过主程序调用的方式,让编程更加简洁,也可以在后期调试过程中更容易地发现问题所在[7]。
2.2 硬件设计
本平台设计使用的主控是SKCON9,如图2所示, 它是能力风暴推出的新一代教育机器人积木系列人工智能控制器,硬件方面延续积木系列设计风格的同时,外壳提供更多结构孔,支持六面搭接,充分实现空间扩展;软件方面,支持流程图编程、条形图编程、 C 语言编程等,有着丰富的学习和应用方式。
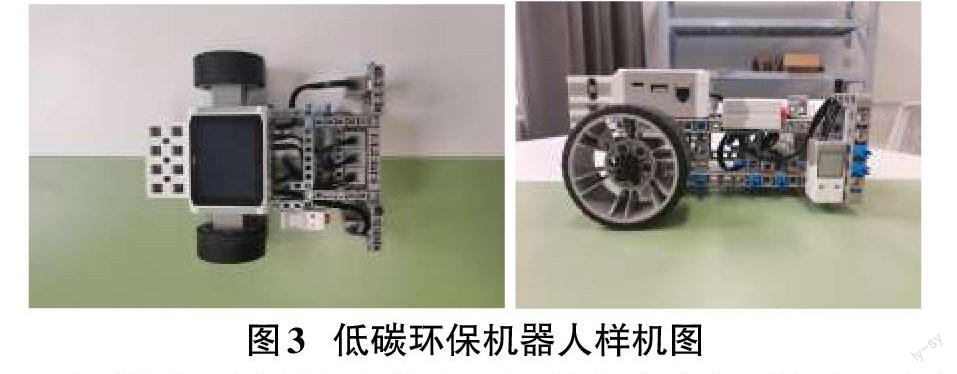
主控搭配各类传感器、电机、机器臂等部件就可以完成机器人的搭建。本平台搭建的低碳环保机器人属于两轮差速驱动机器人,使相比于四轮驱动机器人,该类机器人仅使用两个电机驱动,运动控制模型简洁,速度空间范围更大,适合于通过狭窄区域。该机器人底盘布局采用两驱动轮的同轴式布局,后置驱动轮采用大直径驱动轮对称分布在底盘两侧,使机器人旋转中心与重心重合,保障了控制精确性与运动稳定性。前置从动轮选用小直径万向轮作为支撑轮,增强运动灵活性,在上述机器人底盘基础上完成机器人主体的搭建,搭建所得的样机实物如图3所示。机器人的主题搭配不同机械臂设计就可以完成指定任务。
机器人运行场地分上下两层,如图4所示, 支架为金属材质,两层之间通过斜坡相连, 斜坡与一层场地夹角约为30度, 二层场地护栏为木板(高度10cm, 厚度1-2cm)。 在一层场地、 二层场地、斜坡上各铺有场地膜。
场地上共有2个基地, 一层基地大小为30×30cm(长×宽);二层基地位于斜坡顶端,大小为64×40cm(长×宽)。在一层和二层平台上一共有17个可变位置,根据不同的训练要求,可以在17个位置上放置不同的任务对象,让机器人小车通过寻迹到达指定地点完成任务。例如:在二层平台上放置风力发电模型,则机器人小车需从一层基地通过斜坡到达二层基地,然后运行到风力发电模型的位置,再通过机械臂旋转使发电风扇转至 2 秒以上,视为发电成功,完成该任务后可以继续完成其他位置的任务或者返回基地。
3 实践教学任务设计
下面针对几个经典的实验案例来进行介绍:
(1)图像识别,绿色购物、能量研究院任务机械臂搭建
图像识别和绿色购物的任务是指机器人首先将识别样本的信息准确地记录下来,然后小车运行到绿色购物的位置,将与刚才识别的样本信息同样的物品取下。能量研究院则是小车运行到指定任务位置识别位置上的二维码并显示二维码所代表的的文字信息。图像识别、绿色购物、能量研究院这三个任务的共同点是利用摄像头采集任务点的图像信息。
如图 5 所示,将两块2×4一号板结合在一起,利用紧配销将4根长度最长的11孔直梁固定在板上,尽可能垫高中电机高度,使摄像头距离待识别物块一定距离,实现精准识别。利用U型梁和锥直齿轮结构相结合带动机械臂转动。将50轴插入中电机,中电机工作时将带动50轴及以其为轴的12半高锥齿轮转动,从而带动U型梁上与其啮合的20半高锥齿轮转动,该齿轮能带动其左右连接的两个90 度梁运动,最终使机械臂能够上下转动,完成任务。此外,为保证能量块在小车前进和转向过程中不滑落,将5×7 方形梁结合在两根90 度梁后端,90度梁高于机械臂上端的其他梁结构,能够防止能量块从左右两侧掉落。5×7方形梁能够防止能量块在小车加速时由于惯性从后掉落。在机械臂前端插入两根长度较短的轴,并在轴前端连接90度联轴器,这样的钩状结构能够有效地增长机械臂的长度,保证物块能够被机械臂拨离平面,同时机械臂不拨下旁边的其他物块。
(2)放置能量堆芯,植树造林任务机械臂
利用紧配销将2×4一号板以垂直于中电机平面的方式与电机孔位结合,适当增高电机所在高度,保证能量球能够被精准投入框内。如图 6 所示,用紧配销和梁结构将126度4×6梁固定在电机顶部,这样的结构设计较为巧妙,能让小车在巡线过程中顺带完成任务。当小车到达能量堆芯附近时,电机差速转动驱使小车加速左转,进而使电机上方的梁向左撞击密钥手杆,能量堆芯掉入目标区域。利用两个3×5 90度梁与3倍紧配销结合,组成收纳能量球的框架,并在框架左右两边用3孔梁进行加固,防止运动过程中小球掉落。采取与图像识别机械臂相同的方式带动机械臂摆动,即利用U型梁和锥直齿轮结构相结合进行传动。20半高锥齿轮转动时,能够带动穿过其轴心的50轴转动,进而使得装载小球的框架下摆,完成放置小球的任务。
(3)巧取能源与采取能量块任务机械臂搭建。
由于完成这两个任务不需要机械臂进行较为复杂的摆动或旋转操作,此機械臂设计并不复杂,主要分为上部和下部两个部分,如图 7所示,机械臂上部,两根长度最长的直梁分别通过两块3×5 90度梁结合在一块5×7方形梁的两端。两块5×7方形梁后端通过紧配销左右对称地结合在与直梁结合的方形梁两端,前端结合由两根11孔直梁和3孔 直梁构成的简单梁结构。两块方形梁可在小车前行时推动活动推杆,完成采集能量块任务。较长直梁用于在巧取能源任务中打开下部解锁装置,而较短梁则能解决了能量块下落时被卡住无法落入机械臂的问题。机械臂下部结构全部采用梁搭建,由直梁和两根126度梁构成装载能量块的平面,有效防止了小车转弯时能量块从旁侧滑出的问题。
(4)收集能量球任务机械臂
该机械臂结构如图8 所示,采用20联轴器将80轴固定在方形梁前端中间位置,利用90度联轴器连接该轴与50轴,在50轴的另一端插入1个90度联轴器,形成钩状结构。采用大电机驱动机械臂转动,将两个3×5的90度直角梁固定在大电机左右两侧,用紧配销将方形梁与两个直角梁结合,小车行驶到任务地点附近时,方形梁对齐小球所在平台,在小车前行的过程中推动平台后移。待小球下落后,电机转动便可带动方形梁上方的钩型结构转动,从而钩住能量框,将其带回基地[8]。
4 实践平台对大学生科技创新活动的促进作用
大学生学科竞赛、科技立项等各类科技创新活动,对学生的综合应用能力培养具有极其重要的作用,且大多数竞赛中都包含了程序设计这一环节,并且占比有越来越大的趋势。除了培养学生的编程技能之外,编程教育还可以培养学生的综合能力,促进其沟通合作和创新技能的发展。
该创新教育平台不仅使得有创新和实践想法的学生有地可去、有事可做,而且为我院的大学生科研创新基地开放注入了新的内容和活力。2017年以来,该创新教育平台培育了一批学生,在智能汽车竞赛、机器人创意大赛、电子设计竞赛等各类省部级科技创新竞赛中获奖50余项,并且学生们积极申报各类科技项目。该创新教育平台不但可以降低同学们的学习门槛,提升学习效率,而且对各类学科竞赛、科技立项等有较好的支撑作用,大大提高同学们参与科技创新实践活动的积极性,氛围日渐浓厚,整体创新能力得到了显著提升[9]。
参考文献:
[1] 彭敏,郭梦娇.STEAM教育的基本内涵与发展路径研究[J].教育理论与实践,2018,38(25):14-18.
[2] 冯博琴.对于计算思维能力培养“落地”问题的探讨[J].中国大学教学,2012(9):6-9.
[3] 李瑞生,王秋云,安德智,等.计算机程序设计类课程实践教学的改革与创新[J].实验技术与管理,2012,29(4):183-185,198.
[4] 陈昕,王兴芬,焦健,等.注重编程能力培养的C语言过程化考核教学改革[J].实验技术与管理,2016,33(9):155-158.
[5] 刘明,陈讲清,聂银鑫.基于云端一体的实验室监控系统设计与实现[J].实验技术与管理,2018,35(10):68-72.
[6] 朱轶,曹清华,单田华,等.基于Android、树莓派、Arduino、机器人的创客技能教育探索与实践[J].实验技术与管理,2016,33(6):172-176,206.
[7] 商新娜,张宝森,孙连英,等.基于自研硬件设备编程的程序设计基础课程教学改革探索[J].实验技术与管理,2014,31(7):182-185.
[8] 陶虹平,张小青.促进计算思维落地——计算机编程上机实践教学改革[J].教育教学论坛,2018(48):78-79.
[9] 杨力.基于WebKit的图形化编程软件[D].长春:吉林大学,2015.
【通联编辑:李雅琪】
猜你喜欢
金桥(2019年10期)2019-08-13 07:15:16
考试周刊(2016年79期)2016-10-13 23:35:16
考试周刊(2016年79期)2016-10-13 23:26:02
大学教育(2016年9期)2016-10-09 08:34:10
大学教育(2016年9期)2016-10-09 08:17:37
大学教育(2016年9期)2016-10-09 08:12:01
科技视界(2016年20期)2016-09-29 11:25:15
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
