
基于MATLAB的客观操稳数据处理程序设计
2022-05-30 08:50:36潘玉斌余欣
汽车零部件 2022年5期
潘玉斌,余欣
舍弗勒智能驾驶科技(长沙)有限公司,湖南长沙 410100
0 引言
操纵稳定性是汽车的一项重要性能指标,指在驾驶员不感觉过分紧张、疲劳的条件下,汽车能按照驾驶员通过转向系及转向车轮给定的方向(直线或转弯)行驶;且当受到外界干扰(如路不平、侧风、货物或乘客偏载)时,汽车能抵抗干扰而保持稳定行驶的性能。汽车行业内有着完整的评价体系,20世纪60年代开始,国内外已针对现有评价系统制定了较为完善的试验测试方法。但是测试数据的后处理,存在数据处理量大及工作重复的问题。整车开发阶段,底盘调校、整车性能验收都会涉及操纵性的客观数据测试,操纵稳定性一般需要反复进行多轮测试。操纵稳定性的评价指标较多,需求的计算量很大,目前各车企在评价指标上也会有所差异,给测试工程师带来了很大的计算工作量。
试验数据分析前需要筛选、取样、滤波、数据补偿等大量的数据前处理工作。操纵稳定性试验对驾驶员技能、环境等要求高,测试数据容易受到外界影响,如测试过程稳速、方向盘操作、路面情况等都会造成数据不准确,一般是试验人员进行多次测试,并对数据进行多次筛选。为保证测试数据完整性,涉及数据取样及截取的问题,一般也会在测试开始前做好数据记录。由于传感器安装位置受限,如质心、前后轴的速度、加速度等无法直接测出的参数,需要进行后续补偿。
基于以上原因,虽然很多测试服务商开发了数据处理程序,大都是自己内部使用。当然,测试设备服务商也会随设备打包提供数据处理软件,但是一般基于法规标准开发,不能满足主机厂个性化的需求。MATLAB作为功能强大、脚本代码简单易懂的数据处理软件,使用范围较广泛。因此,基于MATLAB开发灵活、标准流程的操稳数据处理程序是非常重要的。
1 数据处理程序组成
本文主要从原始数据处理取样、偏移补偿、传感器安装位置补偿以及不同工况下的特征值计算等方面设计处理程序,如图1所示。

图1 数据处理程序组成
2 数据前处理
2.1 数据筛选及取样
根据测试标准中要求的输入条件以及实际测试的输入参数来判定数据的有效性。如:在扫频测试中,测试要求输入条件:①车速为(96±2)km/h;②输入转角为23°±0.5°;③频率范围为0~4 Hz。
车速及方向盘角度的数据筛选如图2所示。
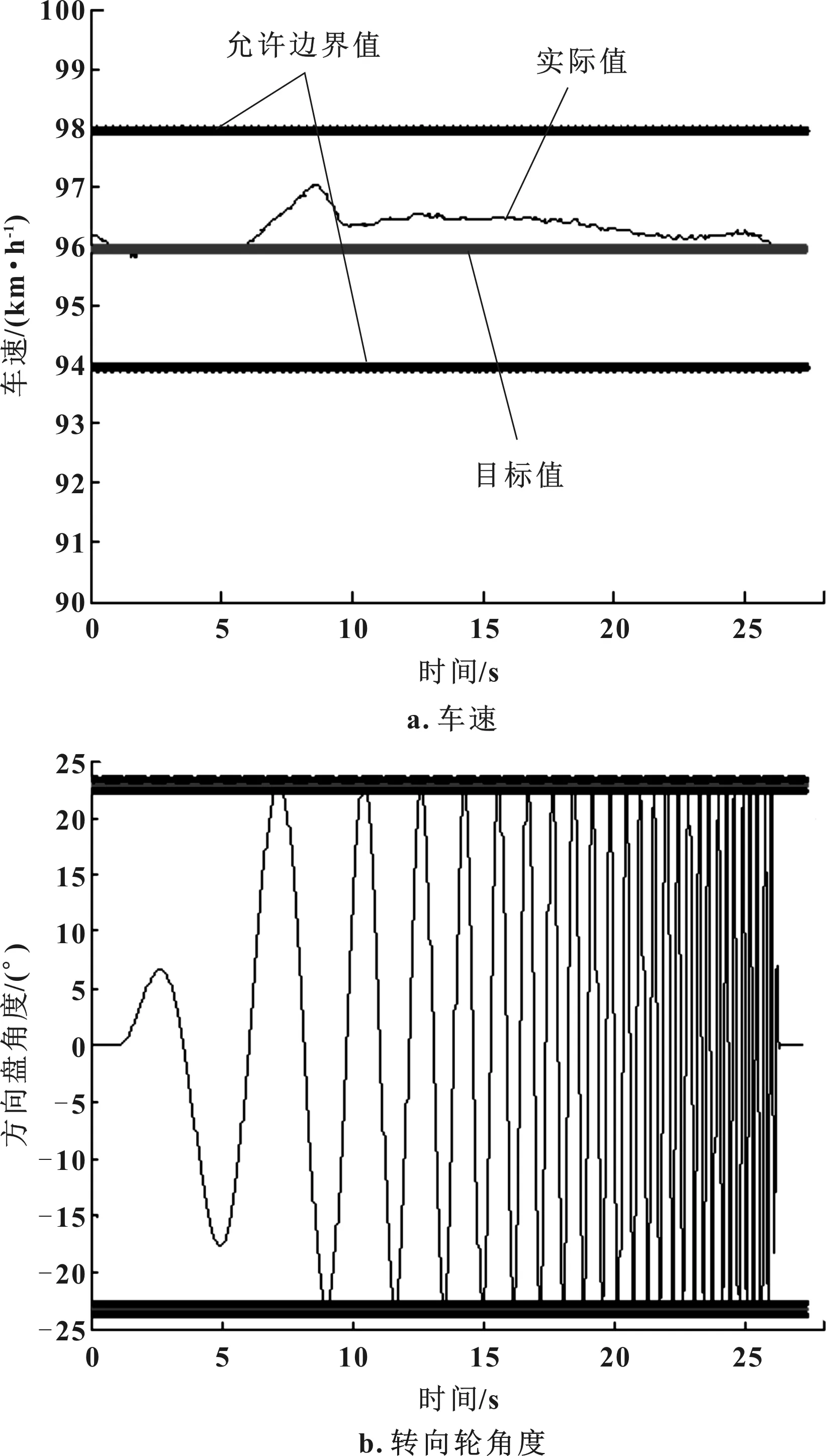
图2 车速及方向盘角度的数据筛选
根据测试要求对数据的有效性进行判定,剔除不满足要求的数据组。选取的有效数据进行截取、取样,必要时可通过插值的方法增加数据采样点。
2.2 滤波器设计
MATLAB工具箱自带多种滤波器,根据经验及数据处理对滤波器进行设计。选择FIR滤波器,滤波前后不允许出现相位差,标准滤波器设置参考ISO15037,其中通带截止频率设置为0~5 Hz,阻带截止频率设置为10~15 Hz;通带中的滤波器增益为1.005,阻带中的滤波器增益为±0.01。
滤波器设计原理及响应变化曲线如图3和图4所示。

图3 滤波器设计原理
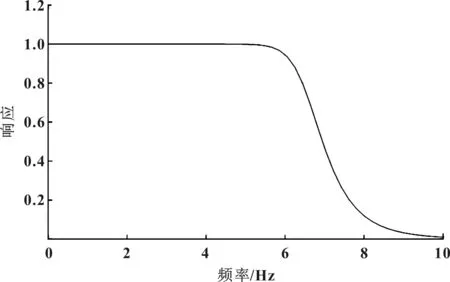
图4 滤波器响应变化曲线
2.3 数据零点偏移补偿
由于传感器自身的零点误差,采集到的数据需要重新校对零点位置,补偿零点偏移的误差。
需要进行零点偏移补偿的物理参数如下:
(1)方向盘传感器输出信号:方向盘转角及力矩信号;
(2)陀螺仪输出信号:横摆角速度、侧倾角、俯仰角、侧向加速度。
物理量参数标零包含两方面:①设备物理标零。设备启动后,按照设备操作进行物理标零操作。②数据动态标零,也就是对采集到的数据进行校验、数据补偿标零。一般测试起始阶段要求车辆保持匀速、直线行驶以稳定在测试需求的状态,后处理时取车辆匀速直线行驶段数据,以上信号输出值为零,判定数据零点偏移量,并进行数据偏移补偿。
图5为方向盘转角偏移补偿。由图可知,0~0.3 s内直线行驶,方向盘转角为零,传感器信号输出2.1°,数据往下偏移2.1°。
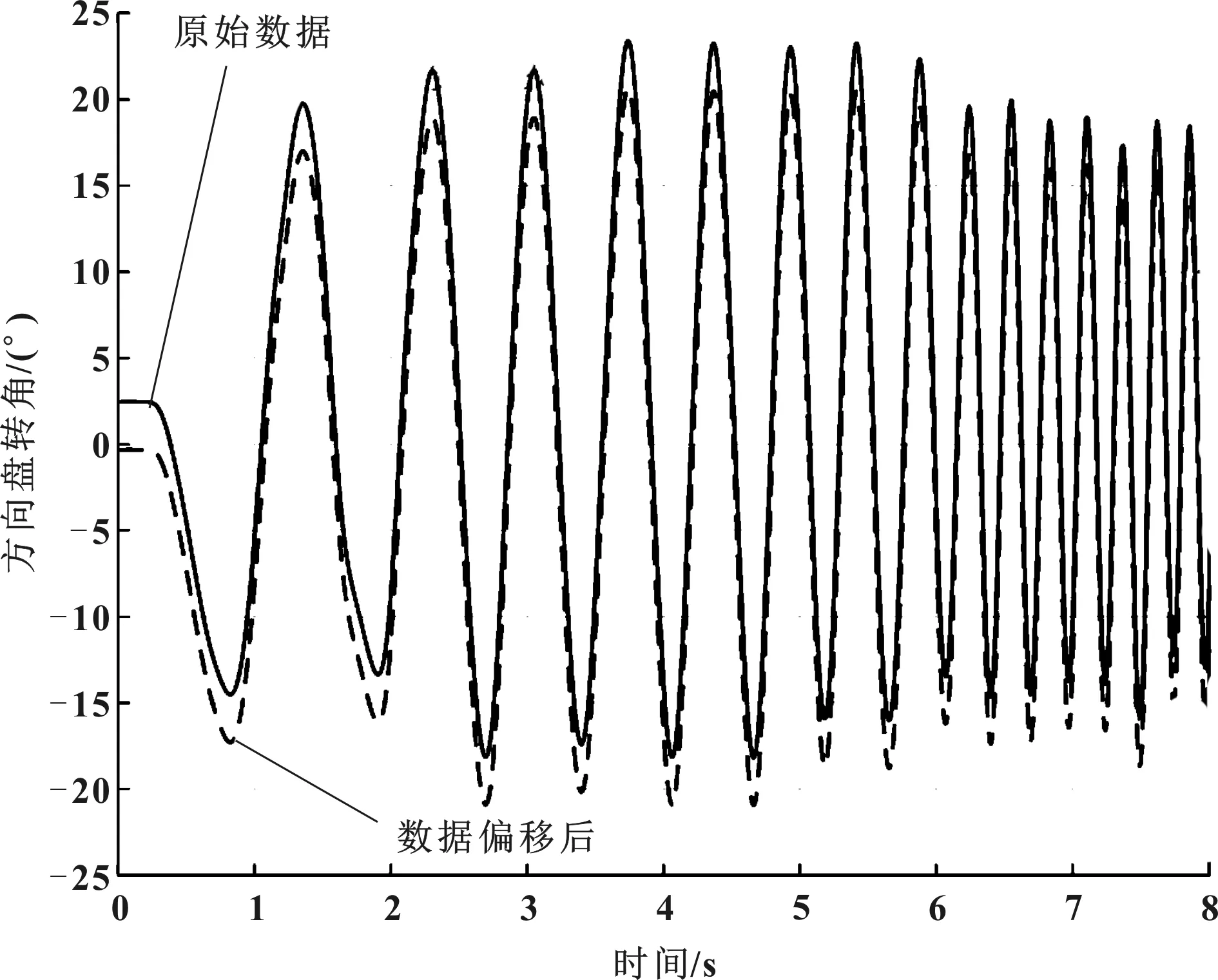
图5 方向盘转角偏移补偿
在测试过程中也会出现数据偏移量随时间递增、递减甚至不规律的变化,这种一般视为无效数据,需要多次操作进行比对。另外,出现这种不稳定的情况时,一般要确认操作输入方式是否正确、周围环境以及设备本身是否存在问题。
2.4 传感器位置补偿
表征整车状态的物理量必须为质心处的运动状态数据,同时计算前后轴的侧偏、滑移也需要前后轴的瞬时状态数据。因传感器安装相对质心前后的中心有位置偏差,需根据传感器测得的物理量以及传感器相对整车质心、前后轴中心的偏差位置计算车体质心处的物理量。
车速()、航向角()信号由光学车速传感器输出,横向加速度()由陀螺仪输出,根据刚体运动学原理,考虑车体横摆、侧倾及俯仰计算质心处的、、c,其中车体横摆角速度影响较大。传感器位置补偿如图6所示。
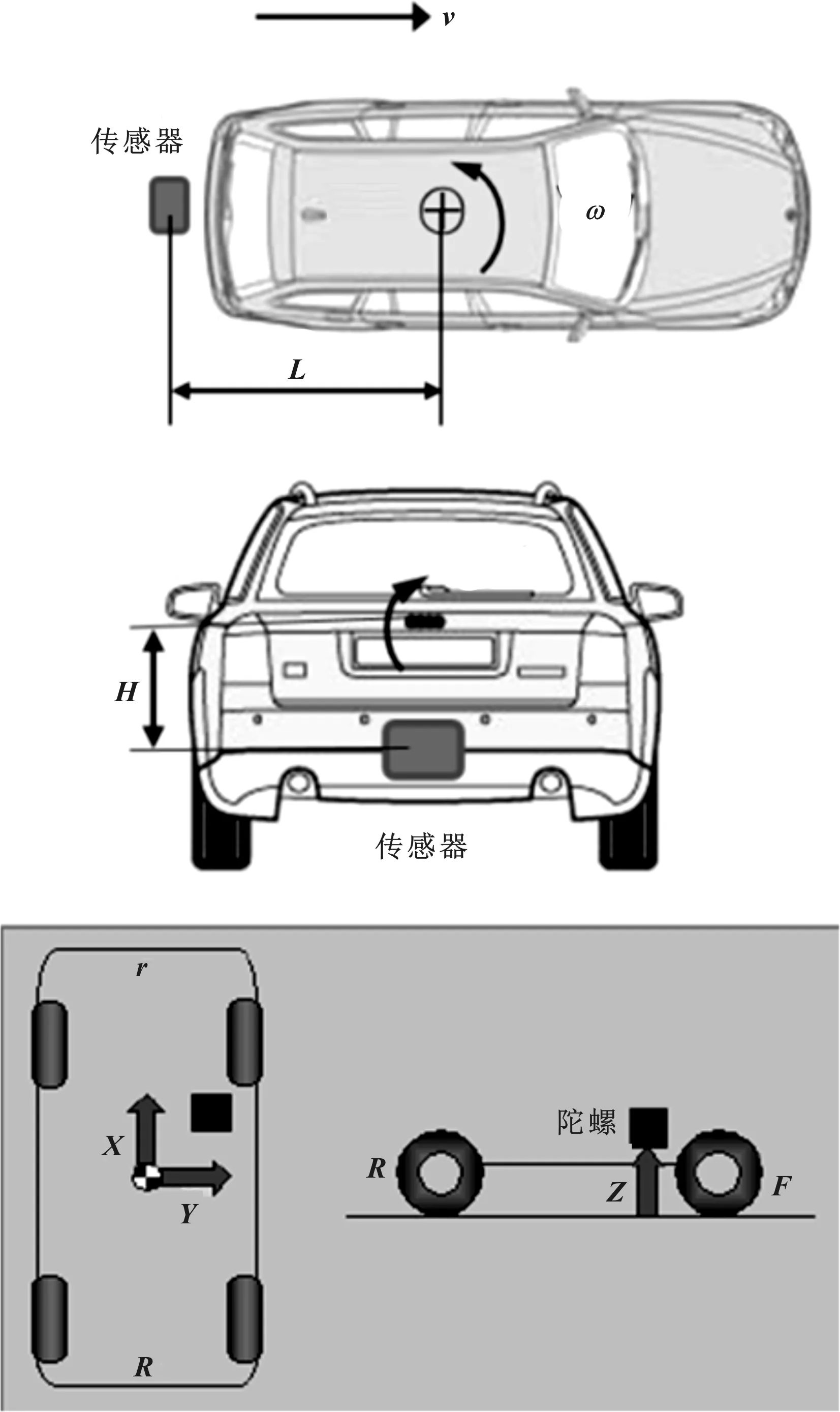
图6 传感器位置补偿
质心处侧向加速度计算公式为:

(1)
质心处向车速等同于激光测试传感纵向车速,向车速计算:

(2)
质心处航向角
(3)
3 试验项目数据结果处理
客观操纵稳定性测试项目中,扫频试验涉及频域响应计算,稳定性测试项目需计算侧偏角、灵敏度等,中心区测试涉及需要计算的特征值比较多,这3项测试项目计算量大,具有代表性。本文以这3项测试为基础,对其进行工况测试分析以及验证程序计算结果。
3.1 扫频试验
由于车辆是“弹性+阻尼”的系统,不同方向盘输入频率下,系统响应会有一定的差异。根据典型的阻尼系统特征,主要从增益、延迟角、延迟时间、相关性等指标进行评介。
扫频试验是考核固定车速下以不同的方向盘角度进行转向,整车横向响应的一致性。主要考核侧向加速度、横摆角速度、侧倾相对方向盘转角在频域上的响应,即幅频特性(增益)、相频特性(延迟)。
采用MATLAB FFT快速傅里叶变换函数。
频率响应函数为:

(4)
增益的计算 :

(5)
相位角计算:

(6)
相干性计算:

(7)
相干性计算,调用MATLAB工具箱函数(,)。
以横摆角速度增益为例,计算不同方向盘转角输入频率下增益、延迟、相关性等参数。原始数据计算结果为离散数据,根据经验用多项式进行拟合,如图7所示。
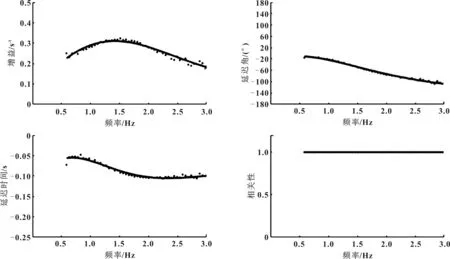
图7 扫频测试结果
由于受场地及测试输入条件的限制,方向转角输入0.2~4 Hz,稳定区域范围为0.5~3 Hz。通常,根据拟合曲线计算出频率0.2 Hz时,转向响应增益作为稳态响应增益(0),共振频率此时也就是最大增益记为,对应的共振频率为max。比值/(0)表征响应的一致性,max反映系统的刚度特性。
3.2 稳态回转
用于评价稳态时的车辆特性主要有转向特性和稳定性。分别绘制方向盘转角、车轴侧滑角、转向盘力矩、车体侧倾角与侧向加速度关系曲线,以及计算特定区间内的梯度值,评价车辆稳态特性。
采用定速、缓慢增加方向盘转角的测试方法,恒定车速80 km/h,误差±1 km/h,缓慢转动方向盘,侧向加速度变化量0.1/s,可通过控制方向盘转角13.5(°)/s,操作过程稳定、均匀。
采用定圆测试方式,可分为稳态和准稳态两种方式。稳态测试方式是在固定轨迹半径且在间隔均匀的不同车速下采集相关数据,计算离散车速状态下的特征值。结果数据为离散状态,并进行拟合。准稳态方式是在固定轨迹半径下,先在设定的轨迹圆,以允许的最低车速绕圆行驶,达到稳态,缓慢增加车速、同时操作方向盘保持车辆轨迹,同样保持车辆侧向加速度增加约0.1/s,直至后轴出现侧滑。该测试方法为连续且接近稳态,因此称之为准稳态,测试数据为连续状态。两种测试方法要求轨迹的偏差在0.5 m范围以内。
主要评价指标:
(1)转向灵敏度/侧偏角在不同加速度区间梯度:表征转向时响应的线性特性;
(2)转向力矩/侧倾角在不同侧向加速度区间的梯度及典型侧向加速度下的值:表征力的线性特性及转向手感。
阿克曼转向就是计算由于方向盘转动引起的轮胎转角(不考虑侧偏),产生的侧向加速度。阿克曼转角计算公式如下:
(8)
(9)
(10)
式中:为方向盘转角;
为转向传动比;
为前轮转角;
c为质心处侧向加速度;
为质心处车速;
为质心处转弯半径。
车辆简化模型如图8所示。
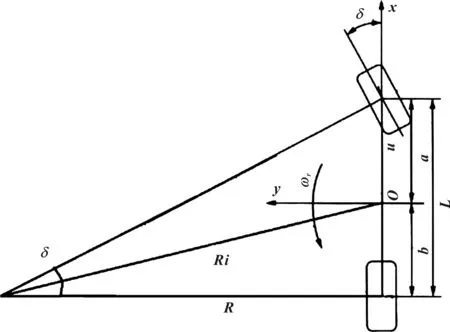
图8 车辆简化模型
稳定性数据处理结果如图9所示,包括不同侧向加速度下方向盘转角、侧偏角、转向力矩、车身侧倾关系曲线。计算程序设计了关键特征值计算模块,得到0.2~0.4区间内特征值为:转向灵敏度 1.43/100°(方向盘转角);不足转向梯度4.85(°)/;转向力矩梯度3.87(N·m)/;车身侧倾梯度3.75(°)/。
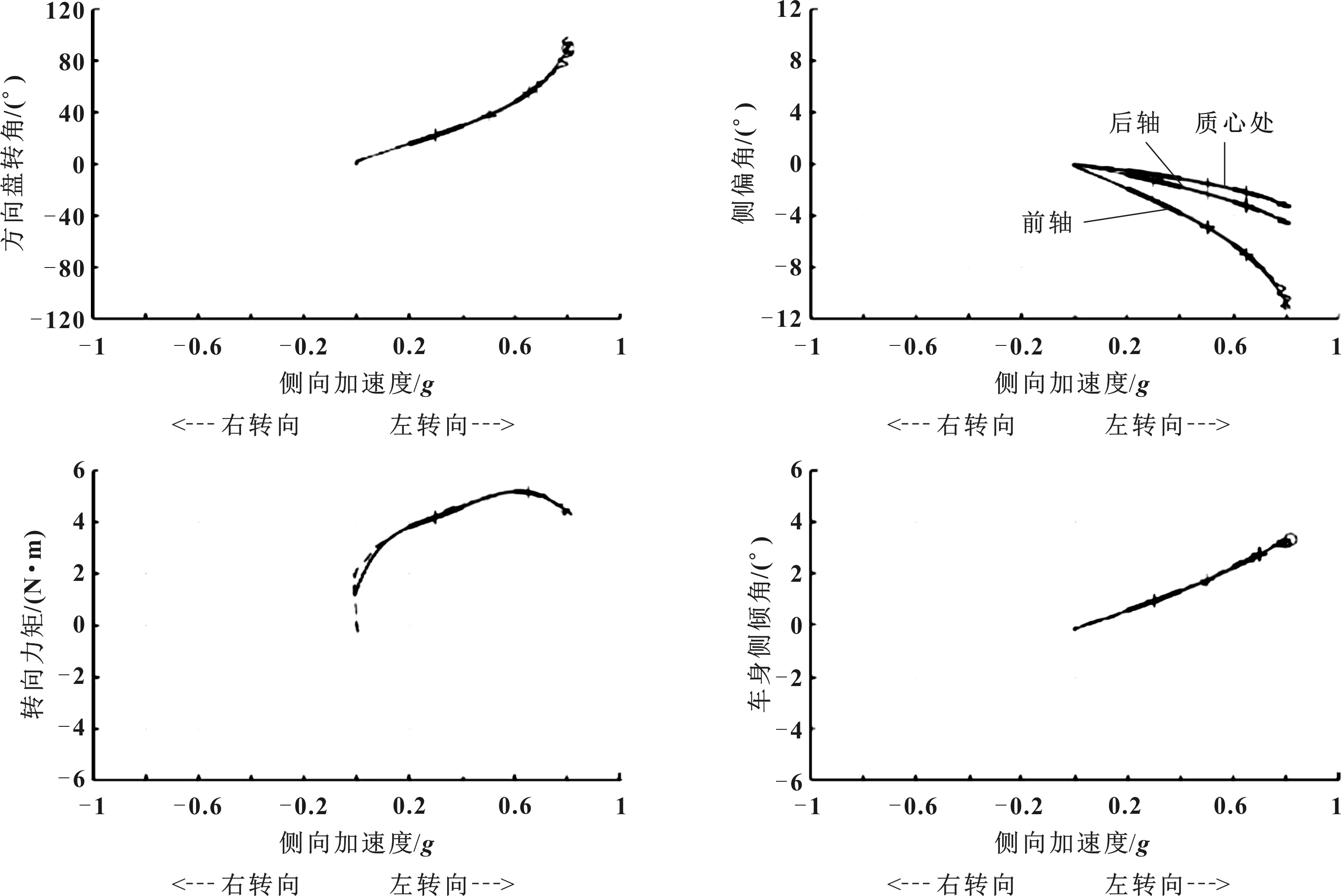
图9 稳定性数据处理结果
3.3 中心区响应
中心区响应主要考核车辆中高速行驶、方向盘小幅度正弦输入、侧向加速度在0.2以内时,车辆响应、驾驶员操作手感(方向盘力),表征车辆在快速路或高速路非紧急单次变道或连续变道时车辆操纵性能、稳定性。主要从以下方面考量:
(1)方向盘力矩与方向盘转角、侧向加速度、横摆角速度关系曲线,表征力的线性度、力的大小、中间间隙;
(2)横摆角速度、侧向加速度与转角的曲线关系,表征响应的灵敏度、响应死区、线性度;
(3)转向力的梯度与侧向加速度关系曲线,表征车辆反馈的路感。
测试方法:一般测试60、96、120 km/h车速下,侧向加速度0.2,方向盘转角以0.2 Hz正弦输入,3个周期以上。
中心区数据处理结果如图10所示,包括不同方向盘转角输入下方向盘力矩、侧向加速度、横摆及侧向加速度速度关系曲线以及转向力矩-横摆角速度曲线。
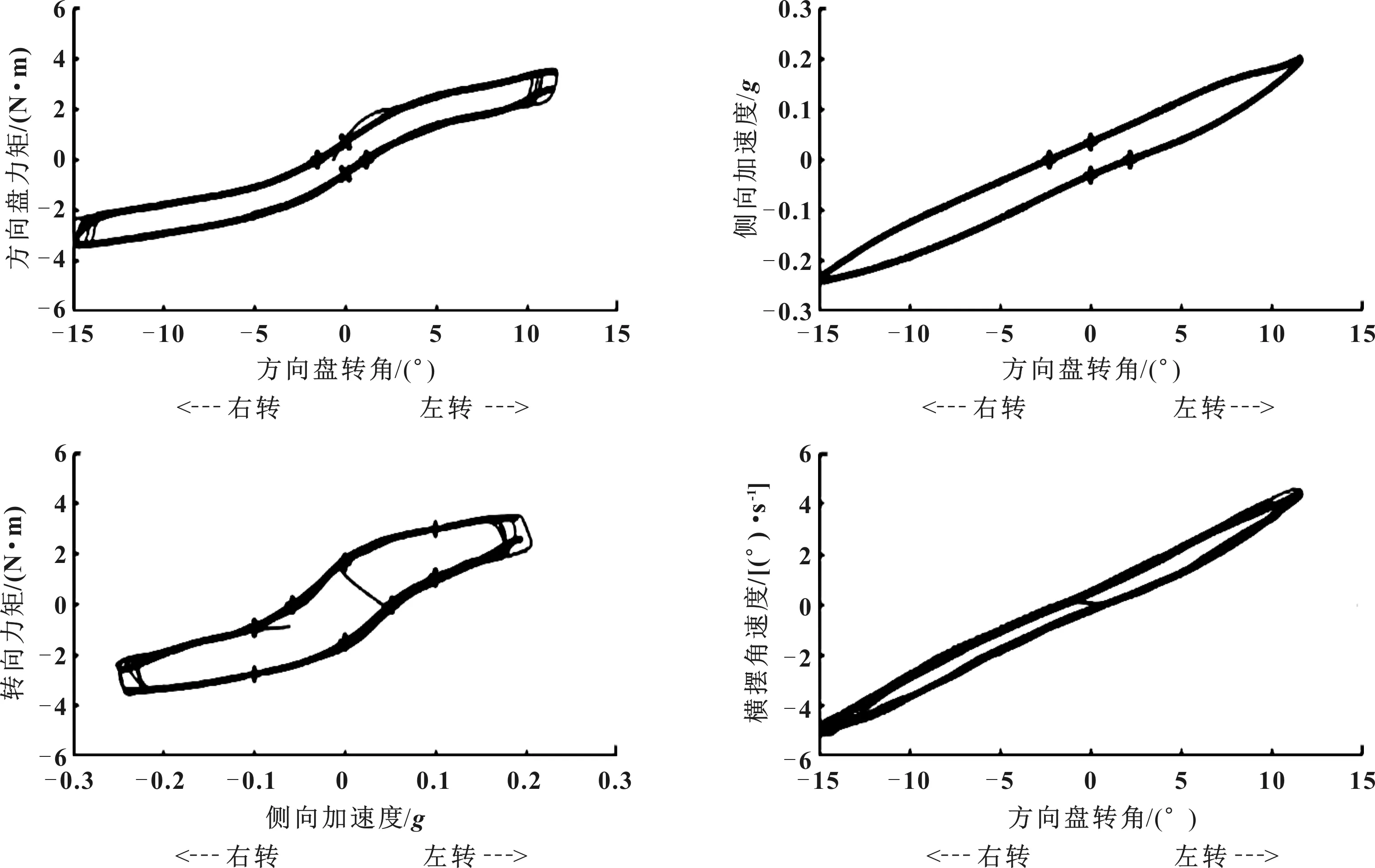
图10 中心区数据处理结果
同时数据处理程序可对各特征值指标进行计算,得到主要特征值结果为:方向盘转矩为0时侧向加速度-0.06;0处的转向力矩1.55 N·m;0处的方向盘力矩梯度为25.01(N·m)/;0.1处方向盘力矩为2.6 N·m;0.1处方向盘力矩梯度为13.29(N·m)/。
4 结论
数据处理程序在实际试验过程中进行了验证使用,并同专业商业软件进行结果对比,误差较小。作为操稳试验数据处理的核心部分,可以协助测试工程师快速完成试验的数据分析、报告编制等。数据处理软件兼顾了标准报告的结果曲线绘制及特征值计算,大大提高了效率。程序设计时,考虑了数据前处理的通用化以及不同工况处理的模块设计,减小了数据前处理的程序设计量,提高了各不同模块程序编辑的独立性,程序使用灵活。
但是,数据处理程序尚未形成交互界面,用户需熟悉MATLAB脚本语言,对使用者要求较高。数据测试特征值的处理、曲线绘制是固化在各数据处理模块程序内部,未形成独立计算子模块。程序尚未开发数据存储及对比功能,尚不支持多车型数据对比功能。程序人机交互界面设计以及客户自定义的特征值计算、数据库管理等扩展功能是未来需进一步的工作。
商用车领域,越来越多的中重卡车企开始关注整车的操稳性能,操稳测试需求越来越多,程序化的操稳后处理程序应用也越来越广。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:24:26
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
今日农业(2020年16期)2020-12-14 15:04:59
知识经济·中国直销(2018年3期)2018-04-12 06:43:36
传媒评论(2017年8期)2017-11-08 01:47:36
解放军健康(2017年5期)2017-08-01 06:27:42
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
交通建设与管理(2015年13期)2015-03-20 15:18:48
汽车零部件(2014年5期)2014-11-11 12:24:30
