扩频体制低轨卫星通信信号捕获与跟踪系统设计*
2022-05-27 03:37朱国富
电讯技术 2022年5期
朱国富
(中国西南电子技术研究所,成都 610036)
0 引 言
低轨道(Low Earth Orbit,LEO)卫星通信系统具有传输损耗小和低时延等通信优势,被认为是最新最有前途的卫星移动通信系统[1]。与常规通信体制相比,扩频通信技术具有隐蔽性高、抗干扰能力强等特点,在军用和民用领域得到了广泛应用[2]。LEO卫星通信系统采用扩频通信技术,可以使衰落和干扰因素对通信质量的影响得到很大程度的改善。
与同步轨道卫星通信系统相比,低轨卫星通信系统的卫星轨道较低,地球表面的接收站与卫星之间存在相对运动,因此接收信号会有多普勒频移。文献[3]中给出了位于高空1 000 km,倾角53°的低轨卫星多普勒曲线,当卫星信号载波为1 GHz时,其多普勒最大频偏可高达40 kHz,多普勒变化率最大可达200 Hz/s。由此可以看出,低轨卫星高速运动带来的多普勒频偏以及多普勒频偏变化率成为卫星通信接收机同步设计的难点。在码分多址(Code Division Mulitiole Access,CDMA)系统中,由于存在直接序列扩频PN码,使得接收同步问题更为突出[4]。
本文以扩频体制低轨卫星通信信号的接收为研究背景,对信号捕获与跟踪处理方案进行了设计,通过仿真分析和实际信号测试验证了该方案的可行性。
1 系统设计
1.1 信号模型
信号产生原理图如图1所示。用d(t)表示原信息码,c(t)表示扩频码,那么发射端信号的复信号形式可以表示为
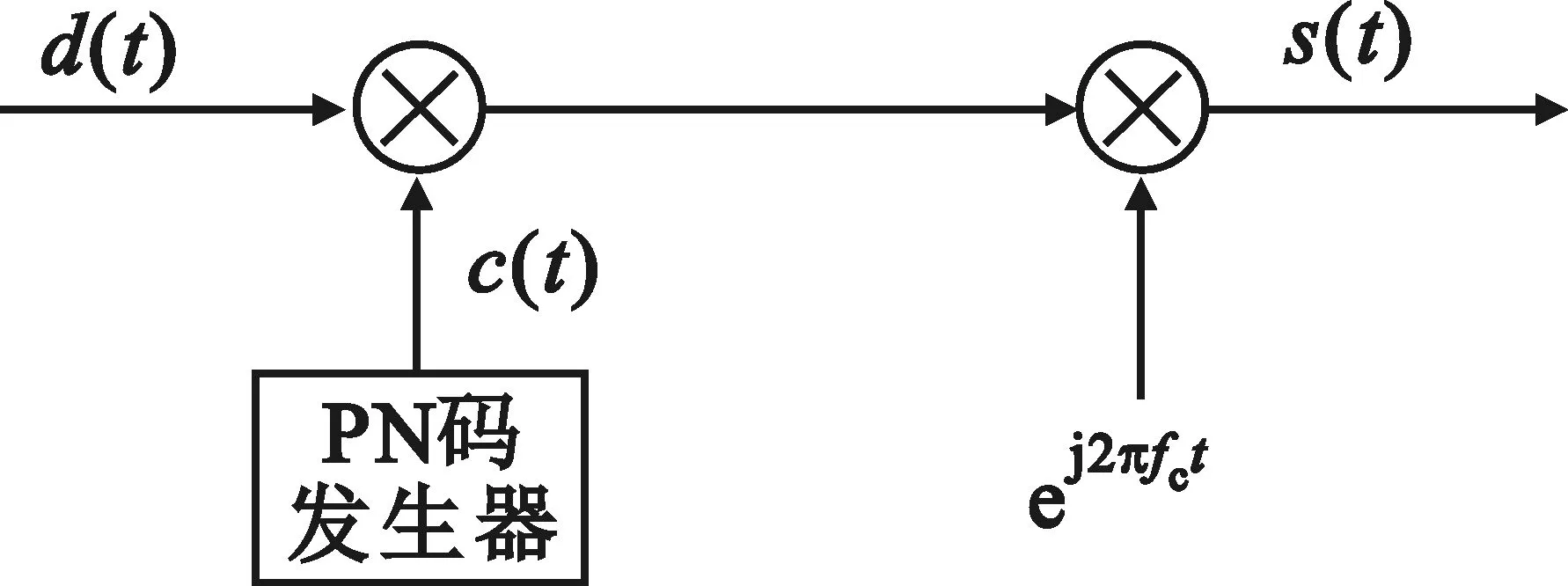
图1 信号产生原理框图
(1)
式中:P为信号发射功率,fc是载波中心频率。地面接收机收到来自卫星信号的复信号形式可以表示为
r(t)=A(t)·d[t-τ(t)]·c[t-τ(t)]·
ej{2π[fc+fD(t)]t+φ(t)}+n(t)。
(2)
式中:A(t)为接收信号幅度,τ(t)为信号传播延迟,fD(t)表示多普勒效应引起的载波频偏(多普勒频移),φ(t)为载波未知相位,n(t)为接收噪声。
公式(2)中的r(t)是一个包含扩频调制和射频调制的宽带信号,它包含了以下几个未知参数:信号幅度A(t)、信息码d(t)、PN码相位τ(t)、载波相位φ(t)、载波偏移fD(t)。
接收机要实现对接收信号r(t)的解扩解调,需要考虑以下两方面:首先A(t)是一个随时间变化的参数,即接收信号的强度是变化的;其次要对参数{τ(t),fD(t),φ(t)}进行估计,并根据估计值产生本地相干信号,以实现对接收信号的相干解调,从而估计出信息码d(t)。
1.2 信号强度变化接收
为保证接收系统稳定可靠,希望接收信号的强度在一定范围内变化,但对于CDMA体制低轨卫星信号而言,由于卫星和地面站的传输时延变化,会引起接收信号强度的变化。可采取自动增益控制(Automatic Gain Control,AGC)对接收信号强度进行调整,AGC的作用是自动调节信号功率以维持一个恒定的平均功率。接收系统接收到信号后,首先通过AGC控制信号幅度,针对不同强度的信号使用不同的增益进行放大。AGC简易原理框图如图2所示。
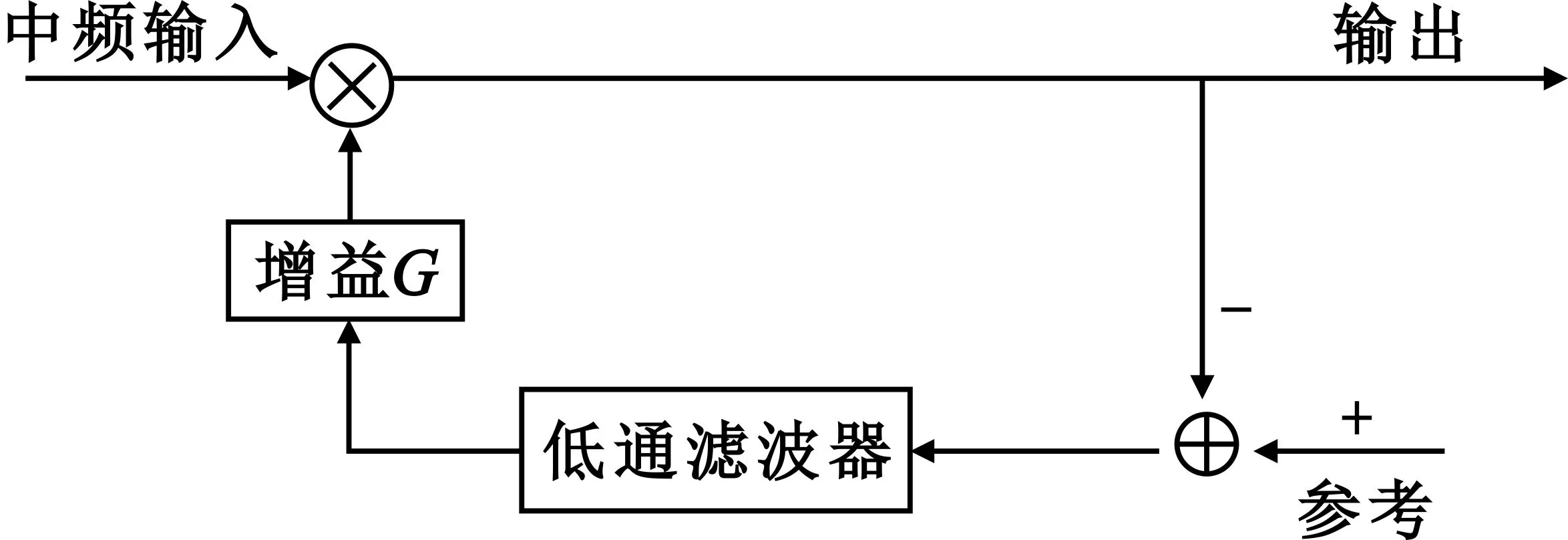
图2 AGC原理框图
1.3 捕获算法设计
对码相位τ(t)和多普勒频偏fD(t)进行粗略估计的过程称为捕获,捕获过程是PN码相位和载波频率的二维捕获过程,其中对τ(t)的捕获称为码捕获,对fD(t)的捕获称为载波捕获。
随着扩频技术不断发展,扩频信号的快速捕获成为国内外学者和工程人员研究的热点问题,目前较为成熟的捕获算法主要有滑动相关法、匹配滤波法、基于快速傅里叶变换(Fast Fourier Transform,FFT)的捕获算法等[5]。本文将采用基于FFT的捕获算法,该方法可以对所有码相位进行并行搜索,因而可以提高运算效率。
设由于多普勒效应造成的接收端载波信号的频率偏移为Δf,则对于长度为N,码片长度为Tc的扩频序列,文献[6]推导出用dB表示的相关值损失系数为
D(Δf)=10lg[sinc(ΔfT)]2。
(3)
式中:T=NTc。由此可以看到,多普勒频偏的影响会影响相关值的大小。因此对信号的相关检测需要考虑到频偏的影响,采用码域和频域的二维检测方法。
本地载波发生器输出载波频率在指定频率范围fstart~fend内按照一定步进值fstep变化,首先在一个频点上对码相位进行搜索,得到所有码相位的相关值,然后将本地载波频率变换到另外一个频点。重复上述过程,直到完成整个频率范围的遍历。载波捕获精度直接关系着后续跟踪环的跟踪速度,如果捕获误差很大,将会造成环路不能锁定,因此fstep的值不能太大,但fstep太小也会带来运算量增大的问题,因此fstep的取值需要折中考虑。
在每个频点内进行相关运算时,就要在一个PN码周期内搜索所有的码相位单元,即需要循环移动本地PN码相位与接收数据进行相关运算。这种滑动相关的过程等价于循环卷积,可以用下式表示:

(4)
式中:N为PN码序列一个周期的长度。
如果直接计算上式,计算量非常大,正比于N。但如果利用时域的循环卷积等价于频域的相乘这一理论,将时域相关运算转化到频域,利用快速傅里叶变换来计算将会大幅度缩短运算时间。FFT捕获算法就是基于这种思想提出的,其数学原理如下:
s(i)⊗pn(-i)=
IFFT[S(k)·PN*(k)]。
(5)
式中:⊗表示循环卷积,IFFT表示傅里叶逆变换,S(k)表示输入信号s(i)的FFT变换,PN*(k)表示本地码序列pn(i)的FFT变换的共轭。
由上述分析可知,FFT算法可以实现在搜索一个多普勒频率的同时对整个码相位单元进行估计,因此大大提高了捕获速度。根基上述公式的推导,基于FFT的并行捕获原理框图如图3所示。
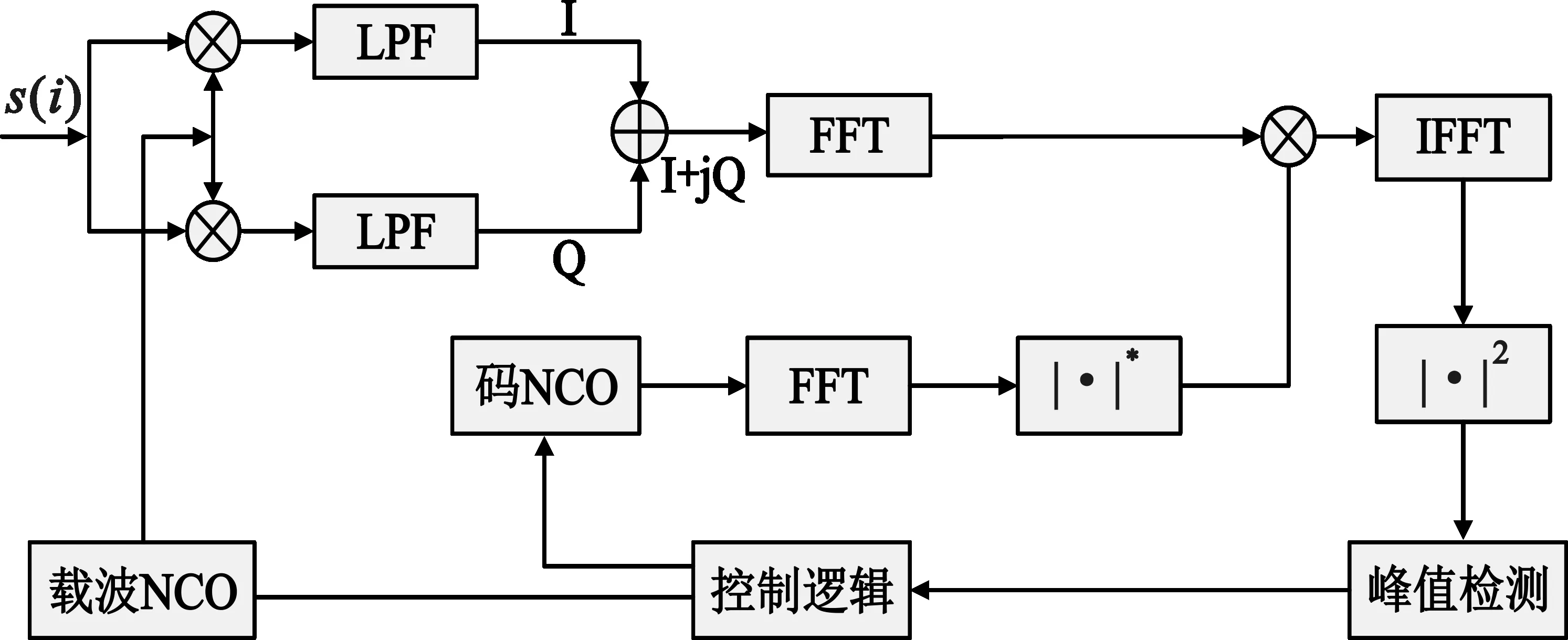
图3 基于FFT的捕获算法基本结构框图
假设伪码相位有N个,为了遍历所有码相位,传统的时域相关方法需要做N次相关运算,共需N2次乘法。将时域内的相关运算变换到频域内的相乘后,搜索所有码相位只需要做一次FFT变换和FFT逆变换,乘法数变为2Nlb(N),整个过程的乘法运算的次数大大减少,从而可以加速捕获过程。
针对微弱信号的捕获,不仅需要利用扩频带来的增益,还应对单次捕获结果进行长时间的累积,通过能量累积来换取较高的增益。常见的微弱信号检测方式有相干积分检测、非相干积分检测和差分相干积分检测。其中,相干积分检测会受到信息数据相位的影响非相干积分存在平方衰减。为消除信息数据相位的影响且考虑到捕获性能,本系统采用差分相干积分法。差分相干积分保持了两个连续的相关输出结果的差分相位信息,其原理是,当信号存在时两个连续相关器输出存在很高的互相关性,但是噪声对两输出结果的影响是独立的。用Yr表示第r次相干积分输出,则差分相干积分可以表示为
(6)
式中:Y*为Y的复共轭。通过对差分相干积分结果进行R次累加可以得到差分相干积分检测器的模型,如图4所示。

图4 差分相干检测结构
已知某低轨卫星多普勒频率范围为-50~50 kHz,PN码周期为1 024码片,针对该系统的捕获模块参数可以设置如下:频率步进fstep为200 Hz,对相关检测量进行16次累加处理。
1.4 跟踪算法设计
对参数{τ(t),fD(t),φ(t)}进行精确估计的过程称为跟踪,其中对τ(t)的估计称为码跟踪,对{fD(t),φ(t)}的估计称为载波跟踪。载波和码的跟踪是在捕获处理成功之后启动的,其主要通过借助载波跟踪环路和码跟踪环路来完成。
在捕获环节,考虑到运算量,频率搜索过程中的步进值fstep不会很小,一般为几百赫量级,在捕获完成后,接收信号还存在剩余频偏,如果捕获正确,则剩余频偏在-fstep/2~fstep/2范围内。除此之外,由于多普勒频率变化率的存在,接收信号的频偏值会处于不断变化的过程中,因此,有必要对载波频率相位进行跟踪处理。
接收机捕获到扩频信号完成粗同步后,接收到的伪码和本地码并没有完全对齐,一般相差在一个码片之内,这就需要进一步的精确跟踪,且噪声的干扰、时钟频率的漂移、信号传输时延的变化等,都会使接收的扩频序列相位状态发生起伏变化。如果本地PN码相位不跟踪这种变化,就会失去同步。因此,必须利用码跟踪环路对伪码相位进行准确估计,以使得系统能够精确地跟踪码相位的变化。
综上所述,跟踪环路需要不断地校正接收信号的相位,确保接收信号与本地信号处于相适应的变化过程,确定载波频率和码相位,从而确保被接收信号能够获得相位锁定[7]。
1.4.1 算法框架
本文设计的跟踪算法框架如图5所示,其中E路信号是将本地PN码超前移位半个码片长度后的相关结果,P路信号是当前本地PN码的相关结果,而L路信号是将本地PN码向后移位半个码片长度后的相关结果。
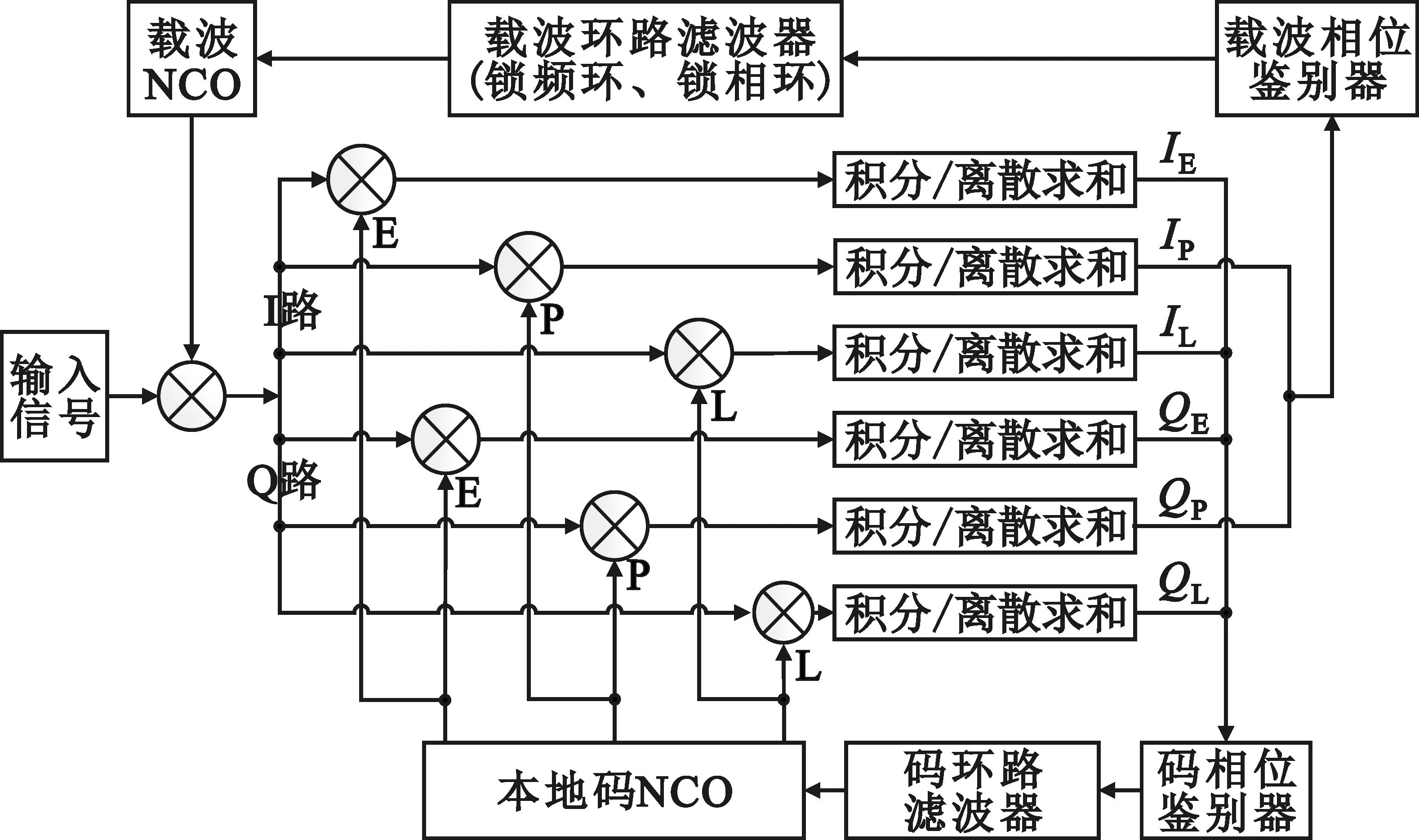
图5 跟踪算法的基本框架图
载波跟踪的常用方法为锁相环(Phase Locked Loop,PLL),为了达到高跟踪精度,锁相环环路滤波器的噪声带宽一般较小,在输入信号的频偏值为几百赫的条件下环路无法锁定或者锁定时间较长,影响接收性能,可以引进锁频环(Frequency Locked Loop,FLL)解决这一问题。FLL具有较好的动态性能,能够容忍载体高动态以及低信噪比影响[8]。由FLL完成频率牵引,拉低多普勒频偏估计的误差,待FLL锁定后进入正式跟踪阶段。正式跟踪阶段采用FLL和PLL相结合的方式来实现载波环路的稳定跟踪。
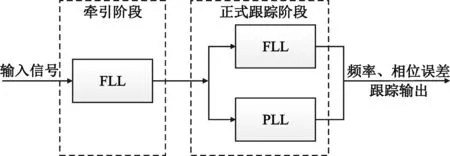
图6 载波跟踪原理
(7)

利用本地产生的PN码C(t+τe),对式(7)中的I、Q两路数据分别进行自相关运算,即可得相干积分/离散求和后的数据,它们可以表示为
(8)
式中:T为相干累积的时间,通常取1个伪码周期所对应的时间长度,也可取伪码周期时间的倍数;R(Δτ)为c(t-τ)和C(t+τe)的自相关函数,其中Δτ=τ-τe。

1.4.2 载波环路设计
(1)鉴频器设计
FLL环路使用鉴频器,它通过P路相干累积数据来计算,采用符号点叉积鉴频器,其计算公式如下:
(9)
式中:k表示数据Iprod和Qprod是第k次数据相干累积生成的,分母是对输出作归一化处理。

(10)
(2)鉴相器设计
PLL环路使用鉴相器,它也是通过P路相干累积数据来计算,采用的计算公式如下:
(11)
式中:分母是对鉴相器输出做归一化处理。
(12)
式中:相位误差代表了频率误差之间的误差。
(3)环路滤波器设计
环路滤波器是载波跟踪环路中的重要组成部分,在环路中具有低通滤波作用,它可以滤除滤波器输入信号的部分噪声,以使FLL和PLL能更加精确地对原始信号进行估计。鉴频器/鉴相器的输出值通过滤波器的滤波去噪后去控制振荡器产生精确的载波频率,使得本地信号与输入信号实现同步。根据CDMA体制低轨卫星信号特点:多普勒频偏变化率多达几百赫每秒,还存在多普勒频偏加加速度,在相位上表现为相位存在三阶导数。根据锁相环相关理论,锁频环环路滤波器至少采用二阶环,锁相环需要一个三阶环路实现跟踪,即针对鉴频器和鉴相器的输出分别采用二阶和三阶环路滤波器[9],如图7和图8所示。关于环路滤波器参数的设置问题,根据大量的仿真模拟计算,给出表1所示参数。

图7 二阶锁频环的环路滤波器

图8 三阶锁相环的环路滤波器
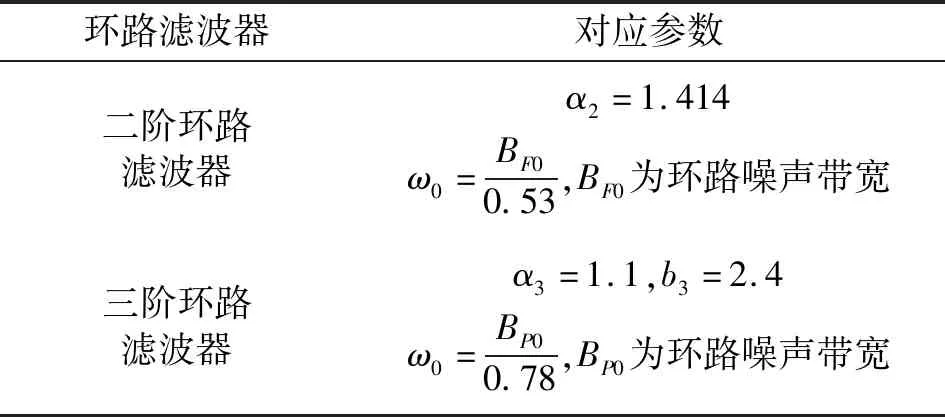
表1 环路滤波器参数
(4)FLL环路锁定门限设计
(13)

(5)PLL环路锁定门限设计
对于锁相环的锁定门限值的计算表达式为
(14)
1.4.3 码环路设计
(1)码环鉴相器设计
码跟踪环路简称码环,其主要功能是保持本地伪码与接收伪码之间的相位一致,然后让接收信号与本地伪码做相关运算,以剥离接收信号中的伪码。码环鉴相器是通过超前(E)和滞后(L)路数据进行相关鉴别运算,得到两路信号的码相位差,采用的码环鉴相器的表达式为
(15)
(2)环路滤波器设计

1.4.4 跟踪误差
(1)锁频环跟踪误差
对于本系统锁频环中的二阶环路,误差主要包括热噪声误差和稳态误差。
热噪声误差与信号载噪比的关系如下:
(16)
式中:T为积分时间;F=2,为FLL相关器因子;Bn为FLL环路滤波器的噪声带宽;C/N0=S/N-10lgT为载噪比。
二阶锁频环对径向加加速度敏感,其稳态频差与加加速度的关系如下:
(17)
式中:f为载波频率,c为光速。
(2)锁相环跟踪误差
锁相环的热噪声误差仅由环路噪声带宽决定而与环路类型无关,其表达式如下[10]:
(18)
式中:T为积分时间,Bn为PLL环路滤波器的噪声带宽。
对于3阶环的稳态误差有[10]
(19)
(3)锁码环跟踪误差
对于超前滞后锁码环,文献[10]给出了热噪声误差和稳态误差。
热噪声引起的相位差表达式如下:
(20)
式中:T为积分时间;F1=0.5,为DLL相关器因子;d=0.5,为超前、即时、滞后相关器间距;Bn为DLL环路滤波器的噪声带宽;F2=1,为鉴别器类型因子。
稳态误差表达式如下:
(21)
式中:d2R/dt2的单位为chip/s2。
某CDMA体制低轨卫星系统多普勒频偏加速度最大值为0.74 Hz/s2,码片速率为1.228 8 Mchip/s,扩频码周期1 024码片,载波频率为1 610 MHz。根据本节对跟踪误差的估计,系统跟踪环路的参数值设置如下:BF0=8 Hz,BP0=15 Hz,BD0=10 Hz。系统扩频增益GP=10lg(1024)≈30 dB,如果接收信号的信噪比为-17 dB,解扩后信噪比为-17+30=13 dB,在此条件下,三个环路的稳态误差均接近于0,噪声误差值计算结果如表2所示。

表2 误差计算结果
由计算结果可以看出,对于系统设计的跟踪环路,噪声条件下的误差值满足接收要求。
2 仿真实验
针对本文设计的捕获、跟踪处理方案,利用Matlab进行仿真,验证所设计的算法是否能够对低轨卫星下行导频信号进行有效的捕获、跟踪处理。
2.1 捕获
随机产生速率为1.2 kb/s的信源数据,与码片速率为1.228 8 Mchip/s的m序列进行直接序列扩频,m序列的周期为1024码片,扩频和数据成形滤波后进行BPSK调制,信号的过采样因子为16倍。对数据进行4倍降采样,FFT变换的点数为4 096,频率搜索范围为-50~50 kHz,频率步进fstep设置为200 Hz。捕获过程进行16次累加处理,捕获判断标准为相关结果最大值/平均值大于等于5。对不同频偏、信噪比信号的捕获结果如图9~10所示。针对-50 kHz和50 kHz频偏,对信号在-20~-11 dB信噪比间进行20次仿真测试,并对成功捕获的次数进行统计,结果如图11所示。

(a)码域

(a)码域
(a)多普勒频偏50 kHz
通过仿真结果可以看出,在信噪比大于等于-17 dB且多普勒范围为±50 kHz的条件下,所提捕获方法均能准确捕获到信号。
2.2 跟踪
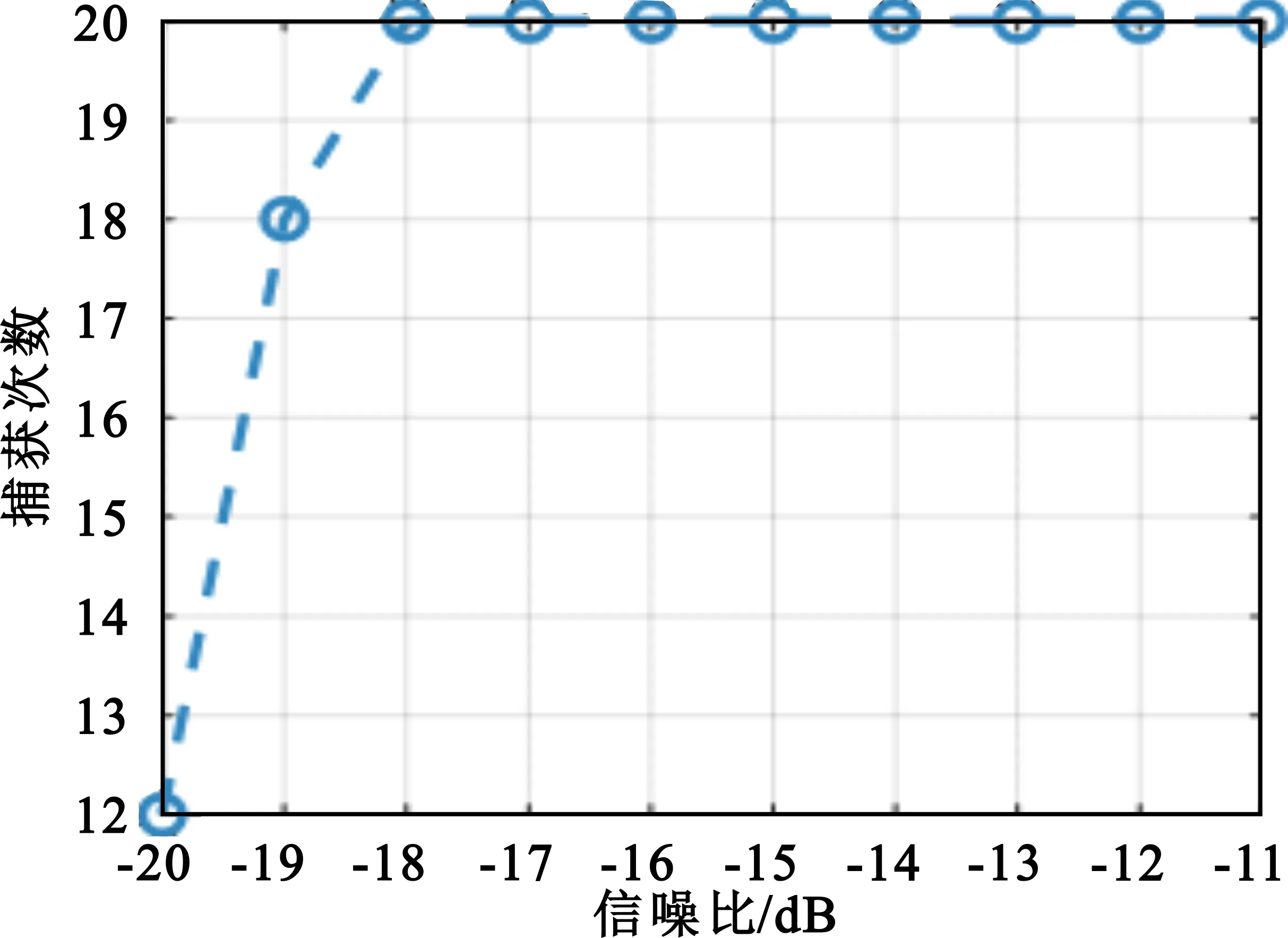
利用图9所示的捕获结果,对频偏为30 kHz、信噪比-15 dB的仿真数据进行跟踪处理,锁频环环路噪声带宽值为BF0=8 Hz,BP0=15 Hz,BD0=10 Hz,锁频环、锁相环达到锁定状态的门限值都为0.9,码环牵引状态下的位移门限值为1/16个PN码码片长度,正常跟踪状态下的位移门限值为1/8个PN码码片长度,跟踪结果如图12所示。
(a)多普勒跟踪结果
根据以上仿真结果可以看出跟踪能达到稳定的结果,锁相环达到设定的稳定值的时间不超过0.5 s。
3 系统实现
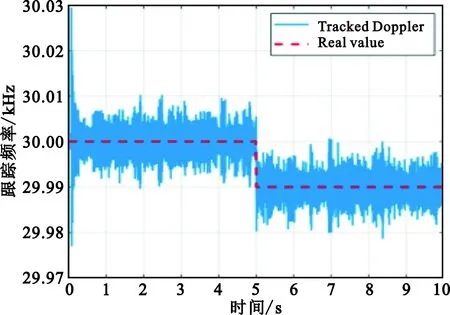
由于FPGA具备高速并行运算能力,本系统选用FPGA作为硬件平台,结构框图如图13所示。
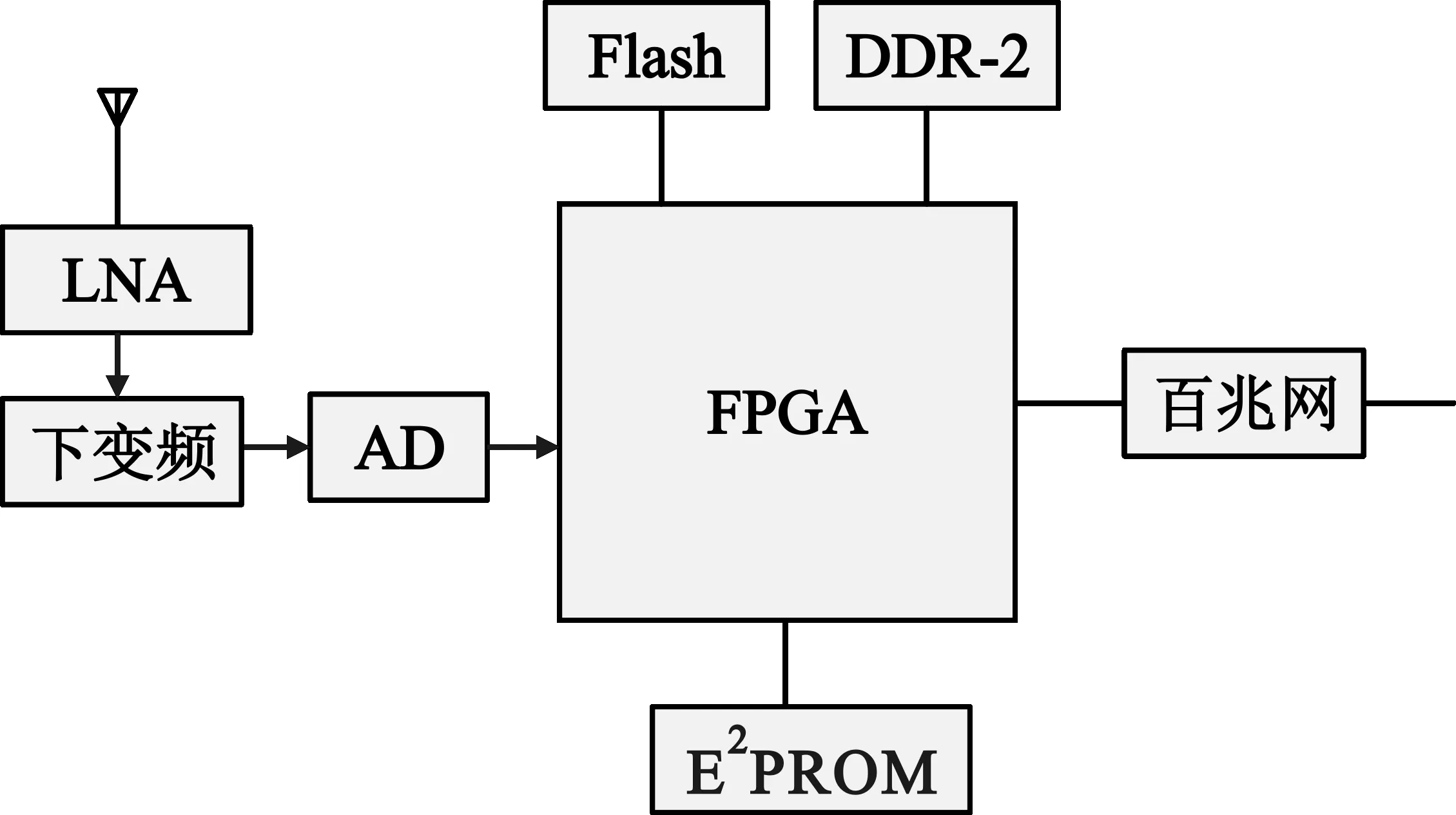
图13 硬件平台结构框图
系统的总体框图如图14所示。接收到的射频信号经过混频处理、AD变换,得到一个数字低中频信号,之后下变频、低通滤波,再进行捕获、相关解扩、跟踪等处理。信号控制流程图如图15所示。
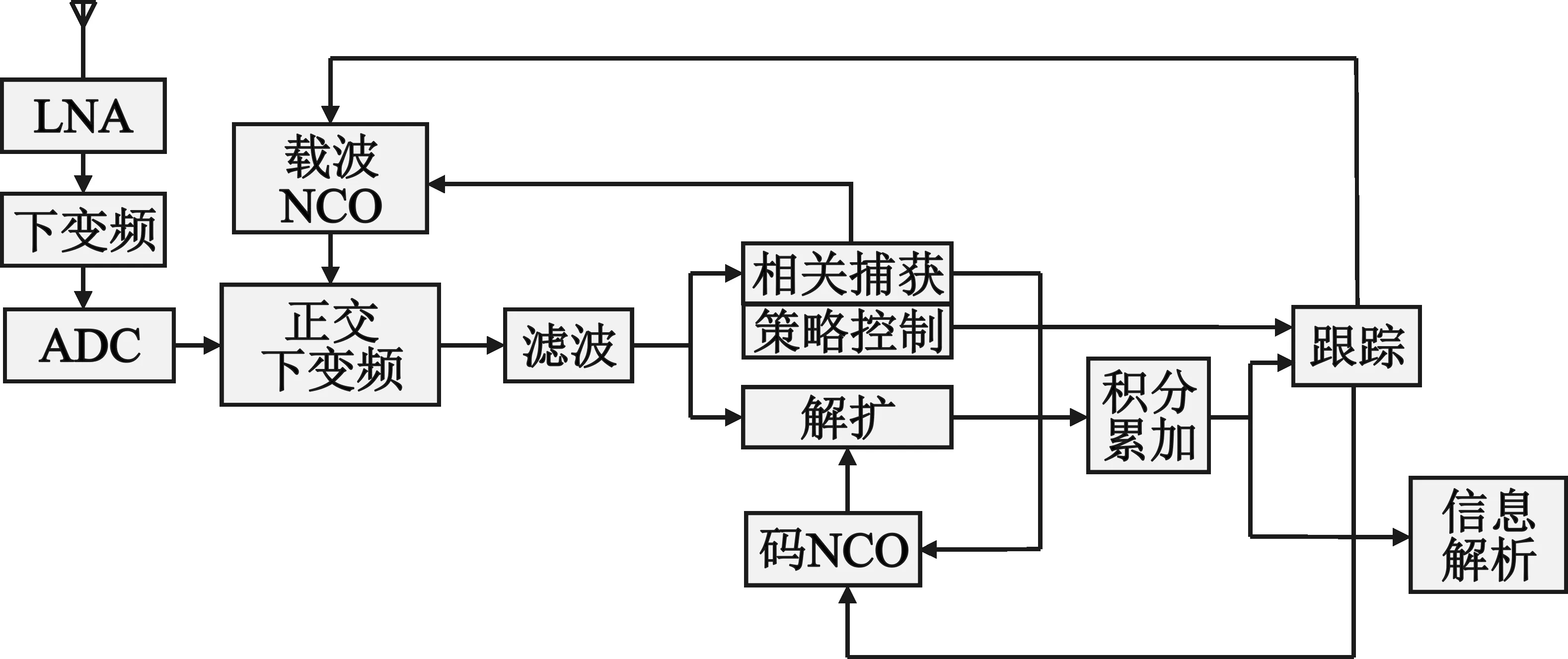
图14 系统功能模块框图
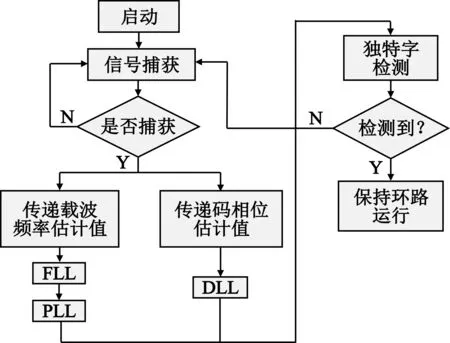
图15 信号控制流程图
4 测试验证
用某低轨卫星实际接收数据对本文设计的捕获跟踪系统进行验证。将实际采集的卫星信号导入信号源中,通过信号源发射信号。在捕获的过程中仍然利用了16个PN码周期长的数据,并对数据进行4倍抽取使得一个PN码周期的样点数为4 096点。捕获结果如图16所示,捕获的多普勒频率为21 kHz,码相位为806。

(a)码相位捕获结果
根据捕获的结果,对数据进行跟踪处理。锁频环的环路自然噪声带宽设为BF0=8 Hz,锁相环的环路自然噪声带宽设为BP0=15 Hz,锁频环和锁相环的锁定门限值都设为0.9。从图17所示的跟踪结果可以看出,环路能达到稳定的状态,锁相环达到设定的稳定值的时间不超过0.31 s。
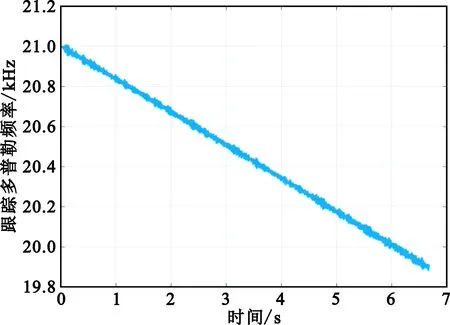
(a)多普勒频率跟踪结果
5 结束语
本文根据低轨扩频通信体制信号的特点进行了信号捕获、跟踪设计,重点对基于FFT的快速捕获算法、锁频环、锁相环和码跟踪环路进行了设计。通过试验验证,设计的系统可以实现CDMA体制低轨卫星信号捕获、跟踪处理。在信噪比大于等于-17 dB且多普勒范围为±50 kHz的条件下,均能准确捕获到信号,且在捕获完成后能在0.5 s内完成环路锁定,进入跟踪状态。
本文跟踪环路的环路滤波器参数优化的研究还不够完善,有些参数只是根据多次仿真结果进行取值,后续需要进一步研究。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
河北工业大学学报(2021年4期)2021-09-23
通信技术(2020年12期)2020-12-23
电动工具(2020年4期)2020-08-20
中国惯性技术学报(2020年2期)2020-07-24
陶瓷学报(2019年6期)2019-10-27
电子制作(2019年15期)2019-08-27
雷达学报(2018年5期)2018-12-05
电机与控制学报(2018年9期)2018-05-14
现代防御技术(2017年2期)2017-05-13