
斯特林制冷机恒压驱动电源输出电流稳定性研究
2022-05-27 03:04:24习中立张晓青聂喜亮李飞艳李家鹏
真空与低温 2022年3期
习中立,张晓青,聂喜亮,李飞艳,李家鹏,陈 军
(1.华中科技大学能源与动力工程学院,武汉 430074;2.昆明物理研究所,昆明 650000)
0 引言
红外探测器在接收外界红外辐射的同时,也对外辐射红外能量,产生背景噪声干扰,此外,还会受到HgCdTe、T2SL(Ⅱ类超晶格)等红外探测器芯片感光材料自身暗电流的影响。当工作在远低于环境温度的低温条件下时,探测器芯片的背景噪声较小,暗电流小,探测率和响应速度较高[1-3]。根据探测波段、背景温度、分辨率以及感光材料等的不同,绝大多数红外探测器芯片的工作温度在35~130 K温区,宇宙深空探测用的长波、甚长波红外探测器芯片的工作温度在0.1~10 K内[4]。美国国家标准局(NIST)的Radebaugh曾系统总结了各种低温制冷技术的特点和应用温区范围[5-7]:在需要较少制冷量的红外领域,斯特林制冷机和节流制冷器具有较大优势,特别是对60 K及以上温区红外探测器的冷却,斯特林制冷机是采用最多的制冷方案。制冷型红外探测器具有探测距离远、对动态目标反应速度快、图像分辨率高等突出优点,广泛应用于工业气体泄露监测、森林火灾防控、航空航天、地球物理等领域。
红外探测器工作波段的选择必须综合考虑目标辐射特性、背景特征、大气传输特征等因素的影响,不同波段具有不同的特点,如中波探测器对高温目标探测灵敏度高,大气透过率好,长波探测器对300 K以下的低温目标探测灵敏度高[8]。为了获得更高的探测灵敏度,提高红外探测器的抗干扰能力,近几年越来越多的应用需求促使科技人员将不同波段的红外芯片集成到一套系统中,形成多波段探测技术。在天文探测领域,为了尽可能减小地基红外望远镜背景噪声的影响,不仅要将红外探测器芯片冷却到特定工作温度,还须同时采用冷光学技术[9-10]将光学系统冷却到比背景温度低的温区范围内。上述应用对制冷机提出了多温区制冷以及不同制冷能力的现实需求。目前,可供采用的技术方案有单台压缩机驱动多膨胀机冷指方案[11-14]、多级制冷机方案[15-17]以及多台制冷机独立工作方案等。长波、甚长波红外器件对工作温度波动较为敏感,多台斯特林制冷机独立工作能使控温稳定性更高,系统的调节能力更强,工作可靠性也更高。
通常采用恒压电源为斯特林制冷机驱动控制电路供电,由于多台斯特林制冷机同时工作,给红外探测器系统恒压电源带来较大的工作负荷。本文以线性压缩机驱动的分置式斯特林制冷机为试验样机,分别采用单台恒压电源为单台和两台制冷机驱动控制电路供电,研究恒压电源输出端电流波形变化特性,分析电流波动原因,提出减小电流波动的驱动控制策略,期望为红外探测器多制冷机多温区制冷设计提供依据。
1 单台制冷机驱动控制试验与结果
1.1 试验系统
图1为单台斯特林制冷机驱动控制试验系统。该系统以一台线性压缩机驱动的分置式斯特林制冷机4为驱动负载,该制冷机压缩机部件采用单活塞布局,动磁式直线电机驱动,制冷机工作频率75 Hz,最大电功耗15 W,整机质量小于380 g。在常温环境下,该制冷机110 K下制冷量大于0.5 W,150 K制冷量大于1 W,主要应用于95~160 K温区红外焦平面探测器组件的冷却,具有体积小、质量轻、效率高和降温速度快等特点。驱动控制电路3提供制冷机直线往复振荡所需的交流电信号,电路包含驱动和控制两大模块,其中驱动模块包括电源输入滤波、DC/AC转换和输出滤波、控制模块包括控温电路和DSP(数字信号处理器)主控的PWM(脉宽调制)电路。恒压电源1为驱动控制电路提供所需的总电能,并保持电压为恒定状态。

图1 单台斯特林制冷机驱动控制试验系统Fig.1 Single Stirling cryocooler drive control test system
斯特林制冷机工作时,先将控制程序写入驱动控制电路,再分别连接恒压电源、驱动控制电路和斯特林制冷机之间的接线。完成准备工作后,调节恒压电源电压至所需的电压值,然后给驱动控制电路供电,驱动控制电路将直流电信号转换成斯特林制冷机所需的交流信号,并驱动斯特林制冷机运动,在冷端产生冷量。一般认为从恒压电源输出到驱动控制电路的电流为恒定的直流信号,但实际上由于控制器电路元件复杂,导致恒压电源的输出电流波动,严重时可能影响系统的供电稳定性。为研究实际输出电流的波动情况,在恒压电源与驱动控制电路之间串联一个电阻值为0.7 Ω的标准电阻2,用示波器5采集并显示电阻两端的电压信号,得到恒压电源的输出电流波形,如图1所示。
1.2 单台制冷机驱动试验结果
图2为单台斯特林制冷机驱动控制试验系统采集的通过串联电阻的恒压电源输出端电流波形。试验过程中,恒压电源输出电压为24 V,对应的输出电流有效值为0.3 A。从图2波形数据可见,恒压电源输出到驱动控制电路的电流并不是恒定的,而是周期波动信号,且波动周期与制冷机驱动频率一致。输出电流信号的傅里叶级数形式为:

式中:i为电流;e为自然指数;In为电流的傅里叶级数项;t为时间;j为虚数单位;n为阶数;ω为周期信号的角频率,当n=1时具有基波频率。
由图2中的波形数据可知,恒压电源的输出电流在一个波动周期内的峰峰值约为1.4 A,与有效值0.3 A相比显著增大。为了满足斯特林制冷机驱动控制电路的功率输入需求,在设计系统恒压电源时必须留有足够大的电流容量以覆盖显著增大的电流波动,这必将导致恒压电源体积增大,系统可靠性降低。
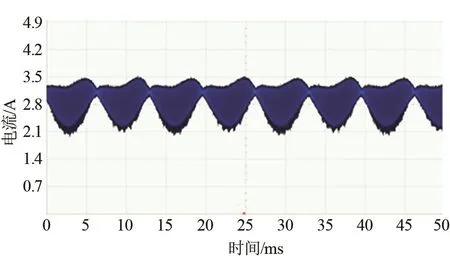
图2 单台制冷机运行时的恒压电源输出电流波形Fig.2 The output current waveform of constant voltage supply when a single cryocooler is driven
2 两台制冷机驱动控制试验与结果
将多波段红外探测系统的多个波段的红外探测器芯片集成到一个探测器杜瓦组件中,通过分光技术将不同波段的光能反射到对应的感光芯片上,再用不同工作温区的制冷机分别对芯片进行冷却。该系统具有集成度高,探测灵敏度高,扛干扰能力强等突出优点,是高性能红外探测的重要技术路线之一。目前从技术实施层面,采用双波段共杜瓦是较为可行的系统集成方案。双波段红外探测系统采用两台斯特林制冷机分别独立工作,并用两套驱动控制电路分别驱动对应的制冷机。为了尽可能减小系统尺寸和质量,在为红外系统供电时,只使用一台恒压电源。两台驱动控制电路同时工作很可能放大恒压电源输出电流的波动幅值,降低系统供电稳定性,因此必须研究两台驱动控制电路同时工作时恒压电源的实际输出特性。
2.1 两台制冷机驱动控制试验系统
图3为两台斯特林制冷机驱动控制试验系统。图中两台线性分置式斯特林制冷机4a和4b分别与两个单独的驱动控制电路3a和3b连接,制冷机具有相同的运行频率。两个驱动控制电路与同一台恒压电源1连接,在恒压电源的主输出线路上连接一个0.7 Ω的标准电阻2,通过示波器5采集并显示电阻两端电压波形,得到输出电流信号。示波器6同时采集两个驱动控制电路输出到斯特林制冷机的电压波形,便于分析对比。
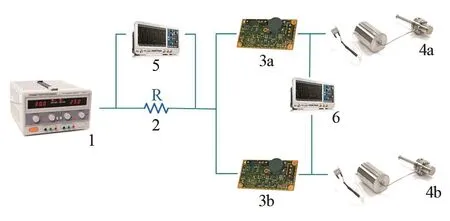
图3 两台斯特林制冷机驱动控制试验系统Fig.3 Two Stirling cryocoolers drive control test system
2.2 两台制冷机同时驱动实验结果
图4为两台制冷机同时驱动时,示波器采集的两个驱动控制电路输出到制冷机端的驱动电压波形,其中绿色为驱动控制电路3a输出的波形,蓝色为驱动控制电路3b输出的波形。试验时设置两台制冷机具有相同的驱动功率,恒压电源工作电压设置为24 V,对应的输出电流有效值为单台驱动时的两倍,为0.6 A。从图4可以看出,两台制冷机同时驱动时,驱动电压为正弦波,同相位。

图4 两台斯特林制冷机同时运行时的驱动电压波形Fig.4 Drive voltage waveform when two Stirling cryocoolers are running simultaneously
图5为两台斯特林制冷机同时驱动时恒压电源输出端的电流波形。从图可见,同时驱动两台制冷机运行时输出电流波形仍为周期波动信号,波动周期频率与制冷机运行频率一致。通过测量计算,得到该条件下恒压电源的输出电流在一个波动周期内的峰峰值约为1.7 A,该数值比驱动单台制冷机时的1.4 A峰峰值大,但不是成倍增大。

图5 两台斯特林制冷机同时运行时恒压电源的输出电流波形Fig.5 The output current waveform of constant voltage sup‐ply when two Stirling cryocoolers are running simultaneously
3 两台制冷机驱动控制优化
3.1 理论分析
从前述章节的试验波形可知,无论驱动单台制冷机还是两台制冷机,恒压电源输出的电流波形均为周期信号。当输出电压为恒定值时,每个驱动控制电路可单独看作一个负载,该负载可表示为如下形式:

式中:r为负载阻抗;Rn为负载的总阻抗幅值。设恒压电源电压为恒定值Vconst,则输出到负载1和负载2上的电流i1和i2可分别表示为:
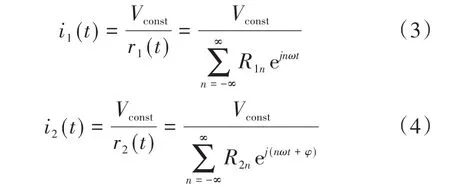
其中,φ为两个驱动控制电路输出到制冷机的电压波形之间的相位夹角,当同相驱动时,该夹角为0°。为简化分析,取n=1时的基波分量,并假设两个负载的总阻抗相等,即R=R1=R2,则输出到负载1和负载2上的电流i1和i2可分别表示为:

由式(7)可见,当φ取值为0时,即两台制冷机同相驱动时,恒压电源输出的电流最大;当φ取值为±π时,即两台制冷机反相驱动时,恒压电源输出的电流最小。
3.2 反相驱动试验验证
为验证上述理论,将驱动控制电路3a的控制程序设置为延迟半个周期,然后驱动两台斯特林制冷机。示波器采集的两台制冷机驱动电压波形如图6所示。从图6可见,两个驱动控制电路输出的电压波形大小相同,相位相反,与控制程序设定相同。恒压电源工作电压设置为24 V,对应的输出电流有效值同样是单台驱动时的两倍,为0.6 A。

图6 两台斯特林制冷机反相运行时的驱动电压波形Fig.6 Drive voltage waveform when two Stirling cryocoolers are running in reverse phase
图7为反相驱动两台斯特林制冷机时恒压电源输出端的电流波形。从图可见,反相驱动两台制冷机时,恒压电源输出的电流仍为周期信号,但波形与图5中同相驱动有所不同。通过测量计算,得到反相驱动下恒压电源的输出电流在一个波动周期内的峰峰值约为0.86 A,该数值仅为同相驱动时电流峰峰值的一半,也显著小于驱动单台斯特林制冷机时的电流峰峰值。该试验说明采用反相驱动两台斯特林制冷机策略,能够显著降低恒压电源输出电流的波动幅值,提高供电系统的稳定性。
4 结论
本文从多波段红外探测技术实际应用需求出发,研究了斯特林制冷机驱动控制电路对系统整机恒压电源输出特性的影响。搭建试验系统,用两个驱动控制电路分别驱动两台线性分置式斯特林制冷机,发现恒压电源的输出电流存在与制冷机运行频率一致的大幅波动信号,可能对系统供电稳定性产生影响。
首先测量了单台制冷机运行时恒压电源的输出电流波形,得到1.4 A的波动峰峰值,然后用同相驱动两台制冷机的方式测量恒压电源的输出电流波形,并得到1.7 A的波动峰峰值。从理论角度对电源负载进行分析,提出采用反相驱动制冷机方式减小电流波动的思路,并通过试验得到0.86 A的波动峰峰值,该数值仅为同相驱动时电流峰峰值的一半,也显著小于驱动单台制冷机时的电流峰峰值,验证了理论分析的有效性。
猜你喜欢
军事文摘(2023年22期)2023-12-19 06:39:46
小学生作文(低年级适用)(2023年5期)2023-05-25 01:48:42
现代经济信息(2022年35期)2023-01-11 02:41:18
装备制造技术(2021年2期)2021-07-21 05:38:56
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:08
国际汉学(2020年1期)2020-05-21 07:22:58
新能源汽车报(2018年47期)2018-05-14 14:06:16
水利规划与设计(2017年5期)2017-06-09 08:56:41
通信电源技术(2016年5期)2016-03-22 01:09:57
中国地震(2015年1期)2015-11-08 11:11:30
