有限元分析技术在腰椎推拿手法生物力学中的应用现状*
2022-05-27 02:50曾雪玲王芳莉
西部中医药 2022年5期
曾雪玲,张 帆,王芳莉
安徽中医药大学,安徽 合肥 230000
有限元分析技术(finite element analysis,FEA)这一概念最早出现于20世纪40年代,被应用于工程力学领域,是根据变分原理求解数学物理问题的一种数值和用于结构分析的矩阵分析方法[1]。有限元分析在20 世纪70 年代被引入医学研究。由于当下对推拿手法在生物力学效应机制的基础实验研究尚不完善,故其安全性和手法作用的理论假说不统一,常有争议。而FEA 能通过数字化的方式将脊柱内部应力改变及生物力学特性的变化过程更加直观的展示出来。
1 国外研究现状
国外研究于1972 年BREKELMANS 等[2]首次将FEA 应用于骨生物力学问题的研究,开医工合作之先河。基本原理是将自由连续的脊柱分割为有限的小单元几何体。再推导出这些小单元的作用方程,该过程称之为有限元的离散化。之后组合整个自由连续体的单元推算出系统方程组,后将其求解。此后其在脊柱外科领域的应用日益广泛和深入。腰椎有限元分析研究的发展主要有以下几个阶段:1)原有工学有限元模型变形后建立二维对称模型。1978 年LIN 等[3]首次建立腰椎活动节段的有限元模型,研究小关节传递轴向载荷的作用,并得出腰椎间盘的9 个弹性模量;2)建立三维有限模型。1986 年SPIKER 等[4]在二维对称有限元模型的基础上建立了三维有限元模型,从而为椎体有限元分析创立了最初始方法。3)1994年SHIRAZI-ADL等[5]首次建立了L2~L3椎体有限元模型。从而对椎体的有限元建立更加精准化,细微化,该模型包括了椎间盘、终板、皮质骨、松质骨。并进行了应力分析研究。4)引入椎体,椎间盘材料属性。RAO等[6]分别测量皮质骨、松质骨、终板、髓核、纤维环的波松比和杨氏模量,建立了不同材料下的椎体模型。5)加入锥体旁软组织。SHIRAZI-ADL 等[7]不再区分皮质骨与松质骨,而在原有模型基础上引入了前纵朝带、后纵钥带、关节囊朝带、黄初带、横突间韧带、棘间初带和棘上韧带等7种韧带。
2 国内研究现状
国内对于脊柱有限元模型研究起步较晚。1990 年戴力扬等[8]首次在国内依靠SHIRAZI-ADL等所建模型的基础上,建立了包括椎体、椎间盘、韧带的腰椎活动节段三维有限元模型,探讨了腰椎在屈伸活动下对椎体间应力分布的情况。后2002 年张美超等[9]建立L4~L5节段有限元模型分析了小关节不同状态下的生物力学特性。陈肇辉等[10]首次对颈椎CT 图进行了三维重建。毕胜等[11]对腰椎牵引过程进行了有限元分析,得出纤维环由于负压的产生促使应力增加,小关节垂直应力几乎为零,髓核内压力随着牵引力的增加而逐渐减小后增大。后毕胜等[12]再次通过有限元法探究了三类腰椎斜板手法下对髓核内压、纤维环、小关节的受力机制。通过实验模拟后得出牵引扳法下髓核内压最小,甚而出现负值,小关节受力减小,内侧纤维环所受压力最大,有助于椎间盘的回纳。坐位扳法和斜板法外侧纤维环受力增加,小关节受力和髓核内压变化不明显。
3 腰椎有限元建模的原理及其研究方法
利用有限元分析技术探究手法作用,首先是建立一个与脊柱相类似的生物力系统模型,该模型根据所研究的目的不同可以建立为正常生理模型和病理模型。将临床诊断收集来的原始资料通过三维重建软件建立一个与受试者相类似的脊柱三维结构。并在此基础上添加椎间盘(纤维环、髓核)之后采用划分立体网格的方式将模型分割为许多小单元个体并赋予各个单元相应的材料属性。众多国内外学者[13-14]将腰椎旁周围韧带,肌肉直接或间接加入模型中。进而获得完善的腰椎有限元模型。所建模型应当接近真实人体腰椎,故当验证其可靠性。常用的验证手段有文献验证、尸体标本验证和临床观察验证。在确定该模型的可靠性后再将手法力进行转化分解为模拟力,假设出不同的工况带入模型中运算所得腰椎和椎间盘各个部位受力和位移情况。工况可以由模拟手法操作所得或自定义工况中的某个单位数值来探究在获得最大疗效时所需手法操作的角度或力的大小。
原始资料的收集方法有X 线、电子计算机断层扫描摄影(CT)、磁共振成像(MRI)、超声、数字解剖学技术等影像学技术和压力传感器、等速肌力测试系统等生物力学检测技术。处理CT、MRI数据的有关软件主要有Mimics、Unigraphics、Simpleware 等,生成模型后导入有限元软件如Abaqus、Ansys和ADINA等[15-17]。其流程图见图1。
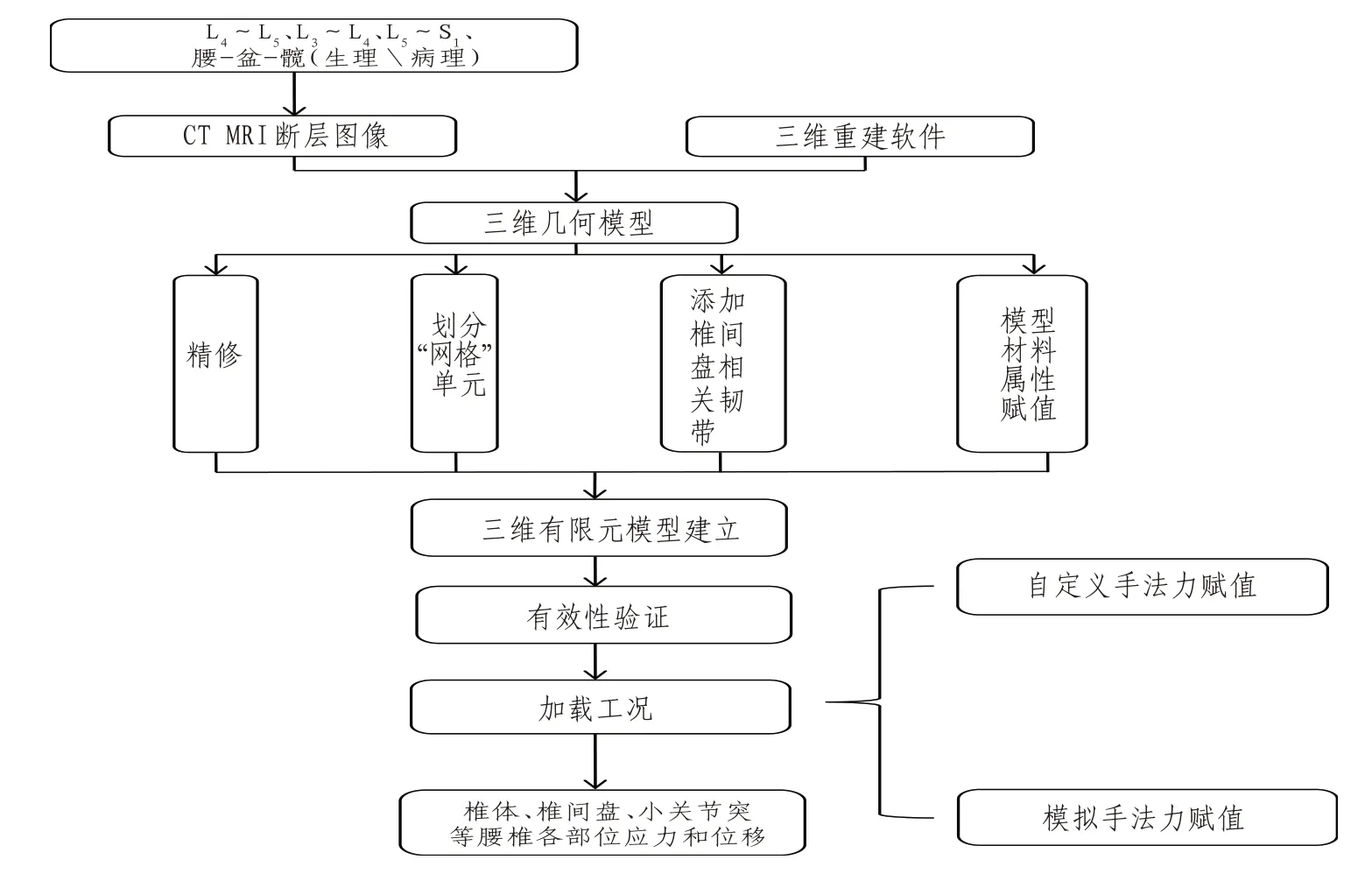
图1 腰椎有限元分析流程
4 FEA在腰椎推拿手法中的应用
4.1 腰椎旋转手法与有限元临床上,腰椎旋转手法以腰椎定点腰椎旋转手法最具代表性。腰椎坐位定点旋转手法在操作过程中通过两个杠杆力而使错位的整个腰椎阶段发生同步位移,一个杠杆作用的作用力由施术者置于颈部的右手产生(以棘突右偏为例),自上而下经左侧关节突关节进行传递,以偏歪椎体右侧关节突关节为支点,进而通过杠杆作用将力扩大为15 倍产生偏歪侧关节突关节的拨正力。在右手施力的同时左手拇指发生的椎体拨正力通过指腹传递于患椎偏歪侧棘突,同样以患椎偏歪侧关节突关节为支点。此时两个不同施力点的杠杆力同时以偏歪侧关节突关节为支点促使整个患椎在瞬间复位,带动小关节粘连得以松动,关节突关节间隙增大,缓解神经根压迫。由此可见,在定点旋转手法作用下,对于患椎偏歪侧关节突关节的受力显著增高,这也正是该手法临床操作的风险所在,提示我们需重视关节突关节的安全性。通过有限元模型模拟该手法操作时施以不同的力和不同角度下探究患椎的位移变化和椎体各个部位的受力情况。徐海涛等[18]在L4~L5有限元模型下,分解坐位旋转手法探究在不同前屈角(6°、9°、12°)下对椎间盘的应力作用和对退变椎间盘的应力改变。结果显示前屈角的改变对椎间盘位移影响不明显,椎间盘几乎无后突现象。应力主要集中于椎间盘前缘右侧和后缘左侧(手法右旋操作),退变椎间盘后缘左侧压力随前屈角增大而增大。向健侧旋转方案优于向患侧旋转且前屈角不宜过大。王国林等[19]通过CT 三维重建L4~L5腰椎有限元模型,检测坐位旋转手法作用时椎体各个部位的应力变化(垂直载荷300 N,X 轴侧弯6°Y 轴前屈6°L4棘突左偏前30°3NM 旋转力矩L4椎体上缘右15 NM 旋转力矩延时0.25 s),结果显示,应力:在手法操作时应力最早发生于左侧小关节下端(右侧旋转),后应力传递于左峡部和椎弓根部,后力平行传递于右侧。椎间盘应力集中点于外侧环前外侧部和右外侧部,左外侧部相对较小。位移:位移自上位椎体上缘向下位椎体椎间盘递减,位移最明显且最早出现于上位椎体左侧关节突,由此使左侧椎间孔增大明显,右侧略微减小。胡华等[20]建立“腰椎-骨盆-股骨上端”三维有限元生物力学模型,将使用64层CT扫描志愿者12腰椎下两侧及股骨上端以上,建立模型,前屈(15°、20°)侧屈(9°、15°、20°)右旋(15°)纵向(加载300 N牵引300 N),将以上相关数据导入所建模型中,运算手法作用下各部位的位移及其应力变化。进而得出:1)在同前屈15°下,侧屈增加,同平面腰椎-骨盆-股骨上端骨质、椎间盘以及各韧带的最大位移增加。位移最大值出现在前屈20°侧曲12°;2)在同前屈15°下,侧屈增加,同平面腰椎-骨盆-股骨上端骨质、椎间盘以及各韧带应力增加。应力最大值出现在前屈15°侧曲20°。胡华等[21]用同样方法建模,探究在旋转定位手法操作中,约束双侧股骨远端部分对腰椎位移的影响作用,运算所得腰椎位移值大于以往文献中数据,推测与约束及加载的范围有关;但对于腰椎和椎间盘的应力和应变,其结果基本保持一致。
4.2 腰椎斜扳手法与有限元腰椎斜扳法是推拿的常用方法之一,符合力学中的杠杆原理,对脊柱源性疾病有较好的治疗作用[22]。但其操作中含有操作者个人的主观意识,手法确切的操作方法和适应证并未完全清楚,尚缺乏金标准。近些年内由于该手法的普遍使用,临床医生的操作经验参差不齐,从而导致意外事故频发。国内有学者[23]提出以自身经验为主要依据的手法教学及临床操作存在相当的主观性和随意性,这也许是斜扳手法发生意外事件的潜在风险之一。“咔哒”声响预示着关节活动达到极位,同时也标志着旋转手法整复操作成功,偏位椎体回到正常生理位置[24]。有学者[25]得出了在“咔哒”声响出现时该手法作用在右侧肩部的应力为(12.552±1.714)kg,作用在右侧臀部的应力为(13.587±1.631)kg。进而利用有限元模拟“咔哒”声响出现时的推扳力和力距下对椎管后部应力改变和椎间盘应力改变数值,为该手法的定量化提供了依据。徐海涛等[26]通过在患者腰椎安装压力传感器来测量当斜扳手法所致咔哒声响时,其力与力矩的大小随时间曲线的变化。结果显示手法操作有弹响时力主要集中于椎间盘后部结构,而椎间盘直接所受压力很小。以上研究说明腰椎斜扳法对椎间盘相对安全。但对椎间盘后部组织薄弱的患者不适用。韩磊等[27]采用有限元光电定位方式测试斜扳手法在体运动轨迹及其作用力的大小。得出斜扳手法的力学特征即预加载力越大,扳动力就越大,最大作用力亦越大;运动特征即高速扳动的运动是腰椎小幅度扭转的轨迹。因此要求在手法操作时以“医患稳定接触”“顺势发力”“随发随收”为原则。豆梦琳等[28]用有限元方法模拟L1~L5的自由度振动系统,研究比对脉冲激励的传统斜扳法和简谐激励的改良斜扳法两种不同手法的力学特性,对基本方程进行解析,求解得出频率≤1 的简谐激励改良斜扳法作用下的位移大于脉冲激励传统斜扳法下的位移且可控制损伤范围。
4.3 拔伸、按压类手法与有限元李延红等[29]通过CT 断层重建的方法模拟了一名体检无腰椎退变志愿者,后将所得图像数据通过ADINA 有限元模拟软件进行建模,并分别模拟水平位、后伸、前屈3 种拔伸手法,从小到大逐渐模拟提升拔伸力的数值,加载到700N 时提取各个层次的云图。后分析可得,拔伸手法在各个位置对椎间盘内压减小都有效,前屈位最为明显,水平位次之,后伸位最弱。该结论与临床所得结论大致相同,该分析为离体实验提供了有力数据。张晓刚等[30-31]通过成年无腰椎退变志愿者,建立有限元模型。探究水平位、后伸10°位、前屈30°位3种体位下模拟拔伸按压手法对椎间盘组织受力位移情况,发现在前屈30°位下位移最明显且对椎间盘压力最小,该位置治疗腰椎疾患安全和有效。随后,张晓刚等[31]、杨学锋等[32]建立了退变腰椎段(L1~L5)的有限元模型,模拟同等的手法作用力,在实验过程中发现对于腰椎狭窄和骨质疏松较为严重的患者其椎管内供神经根移动的空间过小,用拔伸按压手法操作时神经根受力的损伤明显增高,不宜使用拔伸按压类手法操作。该实验研究为临床拔伸按压类手法操作的适应证和所施术的力度有一个明确的阈值,以示参考。
5 问题与展望
为了更好地评价脊柱生物力学,目前在方法学上有3 种,包括体外生物力学实验、体内活体生物力学实验及计算机模拟仿真实验[33]。近年来,突飞猛进的有限元分析技术使计算机模拟生物力学实验得到了快速发展。有限元应用于探究腰椎推拿手法在国内虽然起步较晚,早期主要基于L4~L5建模,不过近年发展迅速,立足长远。为更好模拟手法作用力的特点,形成以L5~S1、腰-盆-髋等的新型建模方法。为临床所常用腰椎推拿手法阐明了作用机制,肯定了手法操作治疗腰椎疾病的有效性并为制定手法的准确操作规范提供了参考。综合近年来国内外学者用有限元分析法探究腰椎手法看,国内建模和手法力的分解方面仍存在明显不足。西方学者对腰椎有限元的建模将韧带及关节囊等关节附属组织引入模型中,从而更好模拟脊柱生物力学的特点[34-35]。且不单单局限于对正常腰椎体的建模,CharoskySL 和MORENO P 等[36]利用有限元建立了健康、高脱水和完全退变不同病理状态下的L1~S1模型,目前国内仍以正常腰椎体建模较多,病理性腰椎建模较少,但临床手法治疗大多为病理性腰椎,故其材料的弹性模量和泊松比与文献所提供的大有不同,因而运算所得手法操作力的参数与临床有一定误差。其次对手法操作力的分析过于单一,忽略了在实际操作过程中手法作用力的复杂性。近年有学者[37]提出将推拿手法作用时腰椎的三维运动通过笛卡尔坐标系和光电定位的方法定性、定量的测量,并显示出来。使各种复杂的手法,转变为计算机可以识别和模拟的应力、距离、角度等力学参数。今后应深入研究腰椎模型的仿真性、病理性腰椎模型材料、手法操作力的分解等方面。以更好地阐释推拿手法的作用机制,为手法的临床操作提供科学的指导依据。
猜你喜欢
健康研究(2022年5期)2022-11-07
中国药学药品知识仓库(2021年18期)2021-02-28
保健与生活(2021年2期)2021-02-04
健康体检与管理(2021年10期)2021-01-03
家庭百事通·健康一点通(2020年12期)2020-12-31
保健与生活(2020年13期)2020-07-24
中外医学研究(2019年18期)2019-08-19
家庭科学·新健康(2017年10期)2017-10-26
中国民族民间医药·下半月(2014年2期)2014-09-26
上海医药(2014年9期)2014-06-27