谐振式无线电能传输系统恒功率输出特性研究
2022-05-26 09:11:00魏金成廖师师邱晓初雷洪成罗乐谢邱虹
电力工程技术 2022年3期
魏金成, 廖师师, 邱晓初, 雷洪成, 罗乐, 谢邱虹
(西华大学电气与电子信息学院,四川 成都 610039)
0 引言
相对于传统有线电能传输,无线电能传输不存在磨损老化的问题,更加安全、便捷[1],且在深井、深水这类特殊环境中,只有通过无线才能保证电能安全传输[2—3]。无线电能传输的方式主要分为感应式[4]、谐振式和微波式[5]等,其中磁耦合谐振式无线电能传输(magnetic coupling resonance wireless po ̄wer transfer,MCRWPT)具有传输距离远、传输效率高、对生物环境伤害小的优点[6],因此MCRWPT的实际应用越来越广泛。在电动汽车无线充电过程中,输出功率的波动会冲击电池,影响充电安全,因此,需要有效的方法来稳定输出功率。
目前针对MCRWPT的研究主要集中在线圈结构[7—10]、补偿结构[11—16]以及传输特性[17—19]等方面。文献[20]针对过耦合频率分裂,提出一种最佳频率跟踪方法,在保证功率传输的同时,提高了系统效率。文献[21]通过锁相环调整电压、电流相位,使系统处于谐振状态,优化了系统传输特性。文献[22—23]根据蓝牙通信反馈接收端信息,进而调整发射端频率,实现最大功率传输,但通信回路增加了用电设备体积和系统成本。针对负载阻值变化引起的功率不稳定问题,文献[24]提出一种双拾取结构,同时在接收端加入DC-DC电路实现功率稳定输出,但这同样增加了用电设备的体积和成本。
因此,文中提出基于反射阻抗原理的2种恒功率控制策略:Sepic电路恒功率输出控制策略和移相控制恒功率输出控制策略。2种控制策略均不必外加通信回路,减小了用电设备体积,节约了成本。首先,对系统模型进行理论分析,说明了负载电阻、发射端电压对输出功率的影响,给出了通过反射阻抗识别输出功率的方法。然后,分别推导了Sepic电路驱动信号的占空比、移相控制中驱动信号的移相角与输出功率的关系,通过调节占空比或移相角来实现对输出功率的调节。最后通过Matlab/Simulink搭建仿真模型进行验证,结果表明,当负载阻值变化时,2种控制方法均能有效地将输出功率稳定在规定范围内。
1 MCRWPT恒功率输出特性分析
文中采用两线圈MCRWPT系统S/S模型,如图1(a)所示,发射端由高频电能转换电路、调谐电容和发射线圈组成。高频电能转换电路将输入的工频交流信号转为高频交流信号;发射线圈和调谐电容组成的谐振回路将电能传输到接收端;接收端由接收线圈、调谐电容、整流稳压电路和负载组成,接收线圈接收电能之后与谐振回路产生谐振,将电能传输到整流稳压电路,最后传输到负载。

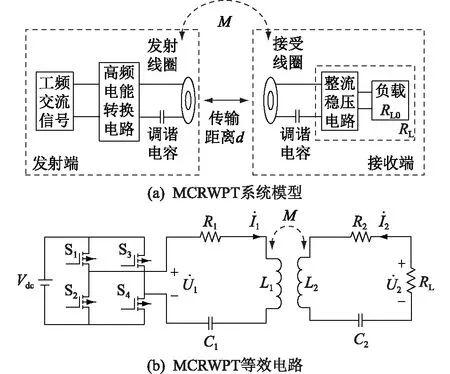
图1 两线圈MCRWPT系统S/S模型结构Fig.1 S/S model structure of two-coil MCRWPT system
根据图1可以得到线圈两端的电压电流方程:
(1)

(2)
其中,
(3)
当系统谐振时:
(4)
此时,发射端和接收端阻抗为:
(5)
此时系统输出功率达到最大值。根据式(1)—式(5)得到谐振状态下系统输出功率PO表达式为:
(6)
根据式(6)得到PO,RL,U1的关系如图2所示。根据实际电动汽车电池电阻值的变化,调节RL在0~30 Ω之间变化。由图2可知,在这一变化范围内,当U1一定时,PO随RL增大而增大;同样地,当RL一定时,PO随U1增大而增大。即当RL变化时,可通过调节U1使PO稳定:RL增大时,通过降低U1使PO稳定;RL减小时,通过增加U1使PO稳定。
相对于发达国家企业成本核算方式的高效性和稳定性,我国现阶段在企业中普遍实施的企业成本核算方式在市场环境中相对的落后且易于变化。在国有企业财务制度应用成本核算中,所处的阶段依然是发展阶段,国有企业成本核算方式发展的落后性严重制约了国有企业的资金管理水平,从而影响了国有企业产能的提升和规模化、全球化发展的水平。
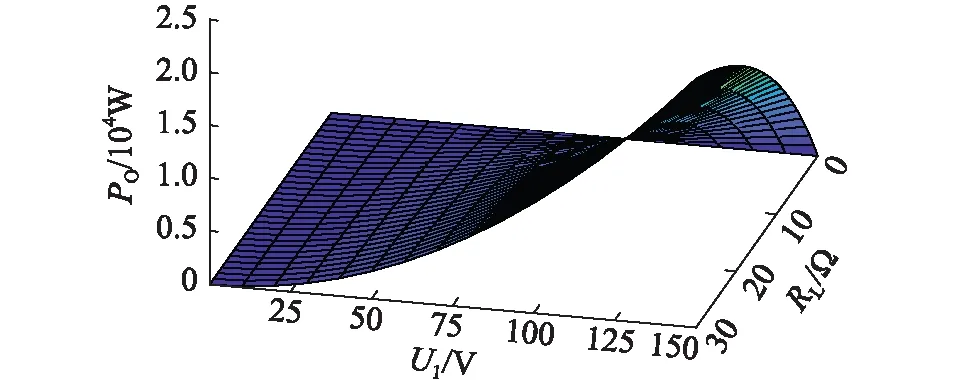
图2 输出功率与负载电阻及发射端电压的三维关系Fig.2 The relationship between output power and load resistance and transmitter voltage
控制输出功率稳定,首先要识别输出功率并判断其是否稳定在规定值。若在接收端加入电路识别输出功率,并通过无线通信的方式将识别结果传输到发射端,再对其进行控制,则不仅增加了用电设备的体积和系统成本,还存在通信延时的问题。因此,文中利用反射阻抗原理,可直接在发射端检测识别输出功率。引入反射阻抗之后,可将图1(b)等效为图3所示电路。

图3 引入反射阻抗之后的等效电路Fig.3 Equivalent circuit after introducing reflected impedance
接收端等效到发射端的反射阻抗Zref为:
(7)
2 MCRWPT恒功率输出控制策略
由第1章分析可知,根据当前输出功率值调节发射端电压即可使输出功率稳定。调压方式有多种,在实际应用中可根据不同应用场景选择不同的方式,文中重点研究Sepic电路调压和移相控制调压。
2.1 Sepic电路恒功率输出控制策略
Sepic电路作为DC-DC变换电路之一,可以实现对输入电压增大或减小的调节[25—26],其结构简单,输入、输出同极性,且只有一个开关管,高频损耗较低,因此适用于电压调节范围大、对系统体积要求低的应用场景。
Vdc-Sepic为经Sepic DC-DC电路变换后的直流电压,与输入直流电压Vdc-S的关系为:
(8)
因此:
(9)
式中:D为Sepic电路中开关管驱动信号的占空比。
PO关于D的表达式为:
(10)
图4为PO与D的关系,PO随着D的增加而增加;D一定时,RL越大,PO的值也越大。可以看出,当负载阻值发生变化时,可通过调节占空比的大小稳定输出功率。
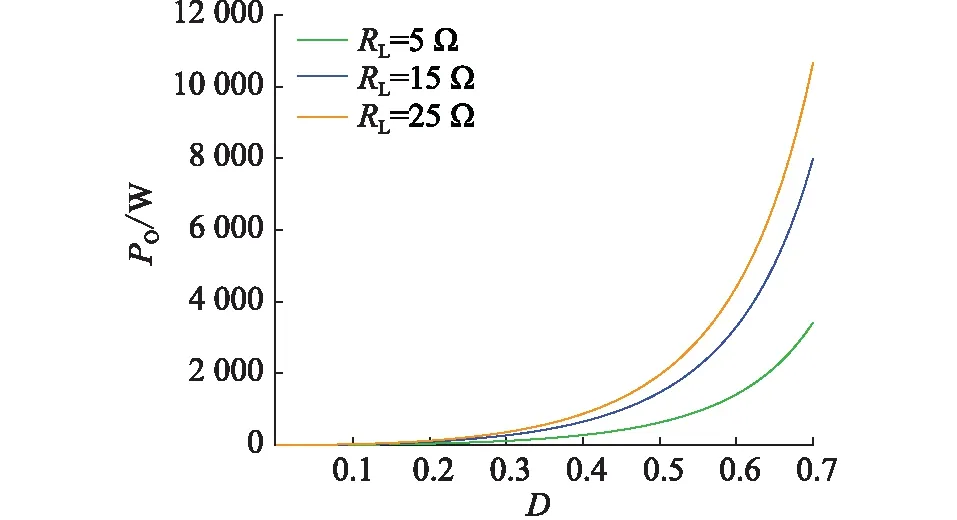
图4 PO与D的关系Fig.4 The relationship between PO and D


图5 Sepic电路恒功率输出控制原理示意Fig.5 Schematic diagram of constant power output control based on Sepic circuit
2.2 移相控制恒功率输出控制策略
移相控制调压可以实现零电压开通(zero voltage switch,ZVS),不必外接DC-DC变换电路,不仅减小了系统体积,还减小了开关管带来的高频损耗。因此, 移相控制适用于对系统体积要求严格的应用场景。
移相控制开关管工作模态如图6所示,G1—G4对应图(1)中全桥逆变电路4个开关管S1—S4的驱动信号;α为移相角;Vdc-Y为采用移相控制时输入的直流电压。可以看出,t0—t1时段, S1、S3开通,S2、S4关断,所以U1为0;t1—t2时段,S1、S4开通,S2、S3关断,所以U1为Vdc-Y;t2—t3时段,S2、S4开通,S1、S3关断,所以U1为0;t3—t4时段,S2、S3开通,S1、S4关断,所以U1为-Vdc-Y。因此,通过改变移相角α的大小即可改变发射端电压有效值。采用移相控制之后发射端电压有效值始终小于输入直流电压值,即只能对输入直流电压进行减小调节。
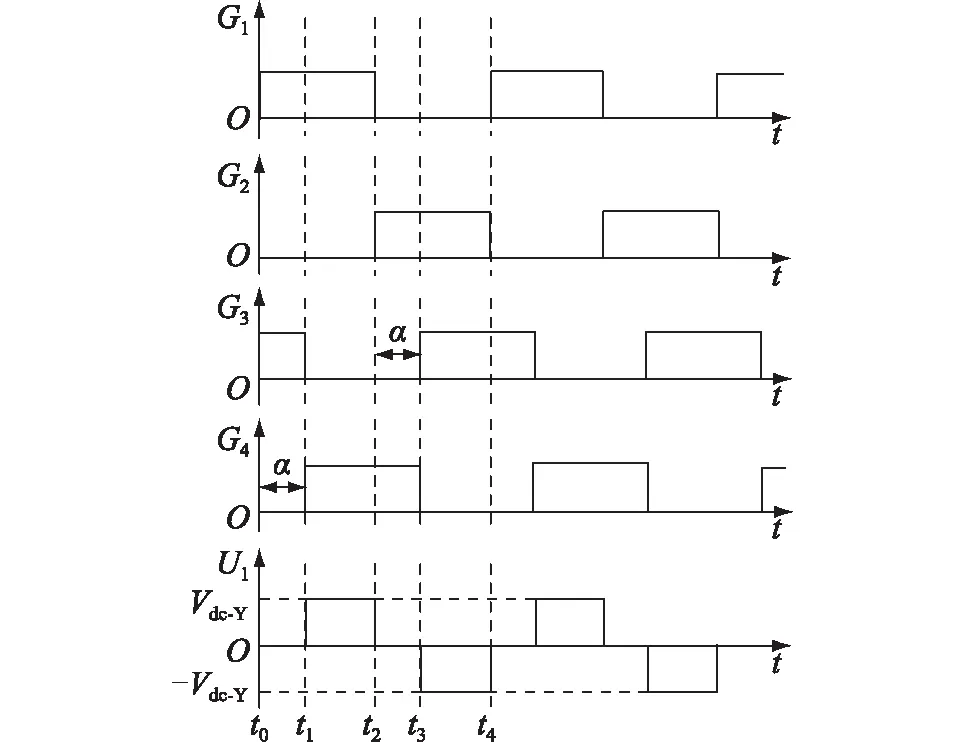
图6 开关管工作模态Fig.6 Switch tube working mode
PO关于α的表达式为:
(11)
图7为PO与α的关系,α越大,PO越小,且RL越大时这一现象越明显。因此,当RL发生变化时,可通过调节α的大小来稳定输出功率。
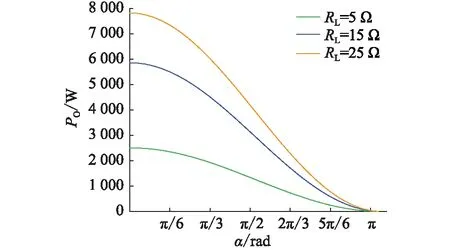
图7 PO与α的关系Fig.7 The relationship between PO and α

图8 移相控制的恒功率输出控制原理示意Fig.8 Schematic diagram of constant power output control based on phase shift control
3 仿真结果及分析
为验证所提出的2种恒功率控制策略的可行性,按照图9所示结构,通过Matlab/Simulink搭建仿真模型。控制部分包含输出功率识别和输出功率控制两部分,利用反射阻抗原理识别输出功率,再通过调节D或α稳定输出功率。
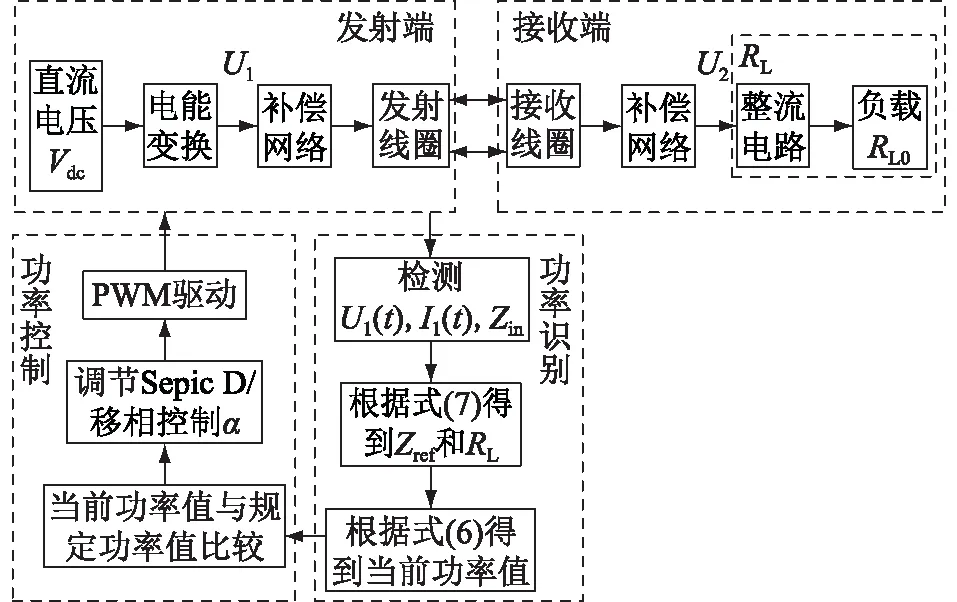
图9 恒功率控制系统结构Fig.9 Structure of constant power control system
按照电动汽车通用充电频率,设定系统频率为85 kHz,输出功率要求稳定在1 kW左右,且误差不超过5%。在电能传输过程中,调节RL0的值分别为5 Ω,8 Ω,11 Ω,14 Ω,17 Ω,20 Ω,23 Ω,26 Ω,并观察当RL0变化时PO的变化情况,系统具体仿真参数如表1所示。
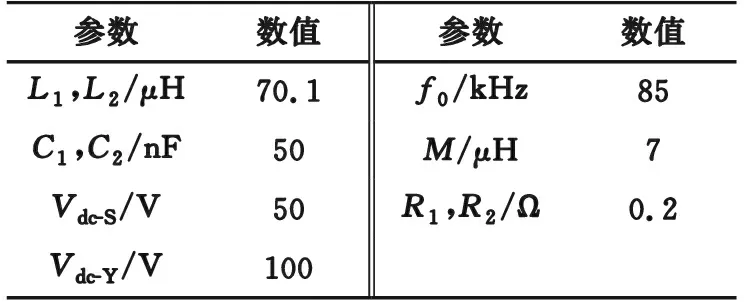
表1 系统仿真参数Table 1 System simulation parameters
Sepic电路能够调节电压增大或减小,而移相控制只能减小电压,因此设定Sepic电路输入直流电压Vdc-S为50 V,采用移相控制时的输入直流电压Vdc-Y为100 V。
图10为采用Sepic电路调压控制时PO随着RL0变化的仿真结果。可以看出,未加入控制回路时,PO随RL0增大而增大;加入控制回路后,PO可以很好地稳定在规定值(1 kW)。RL0为5 Ω,8 Ω,11 Ω,14 Ω,17 Ω,20 Ω,23 Ω,26 Ω时,对应的D分别为58.5%,53.4%,50.2%,47.9%,46.2%,44.9%,43.8%,42.8%。随着RL0的增加,所需占空比减小,这与2.1节中的理论分析一致。
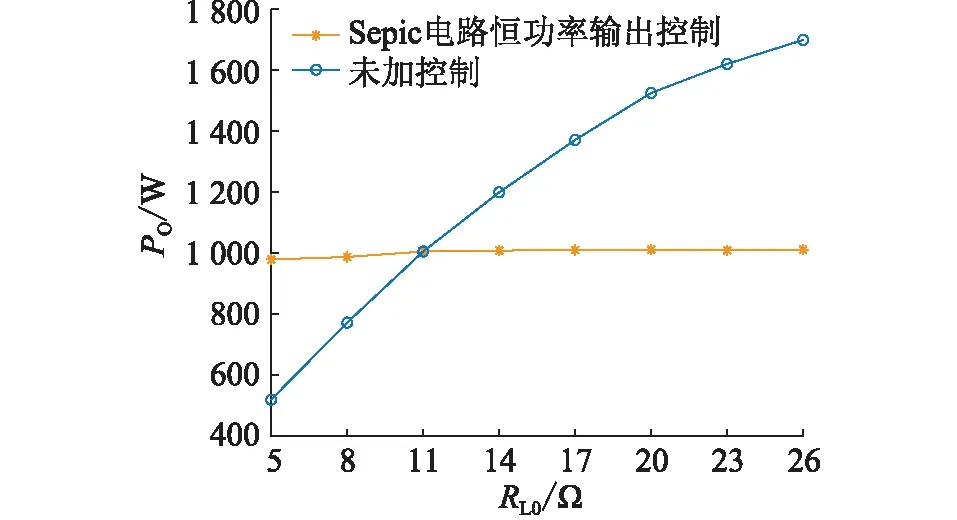
图10 Sepic电路恒功率输出控制仿真结果Fig.10 Simulation results of constant power output control based on Sepic circuit
图11为采用移相控制调压仿真结果。可以看出,采用移相控制同样能使PO很好地稳定在规定值(1 kW)。RL0为5 Ω,8 Ω,11 Ω,14 Ω,17 Ω,20 Ω,23 Ω,26 Ω时对应的α分别为86.4°,105.3°,108°,120.6°,124.2°,126°,127.8°,129.6°。随着RL0的增加,移相角减小,这与2.2节中的理论分析一致。
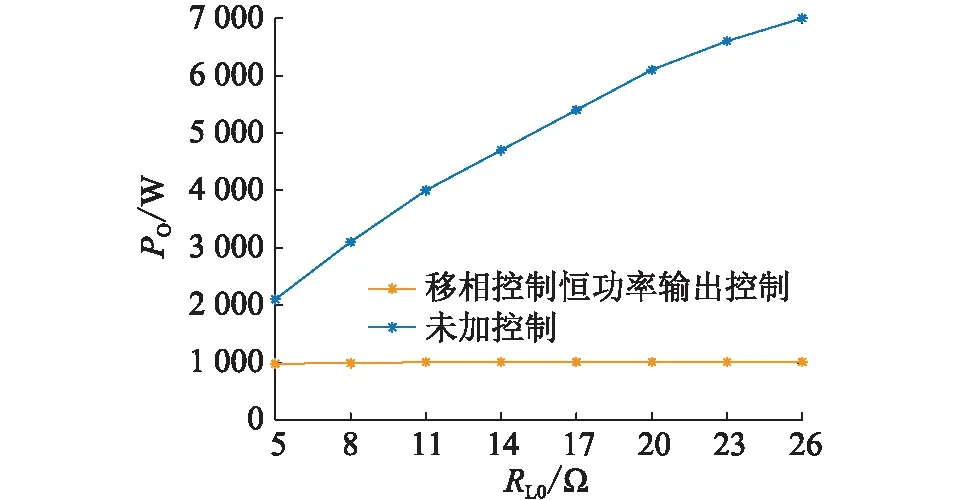
图11 移相控制恒功率输出控制仿真结果Fig.11 Simulation results of constant power output control based on phase shift control
从仿真结果来看,输出功率对于负载电阻的变化较为敏感,当负载发生变化时,若不加入有效的控制方法,输出功率将会产生较大的波动。文中所提2种恒功率控制策略均能有效稳定输出功率。
4 结语
文中对MCRWPT系统S/S模型进行理论分析,给出了输出功率与发射端电压、负载电阻的关系。针对无线充电过程中负载阻值变化引起的功率波动,提出Sepic电路和移相控制2种恒功率输出控制策略。仿真结果表明,所提出的控制方法能使输出功率稳定在规定值。此外,基于文中研究基础,可在今后的研究中结合其他系统参数对输出功率的影响,提出能够适应更多应用场景的恒功率控制策略。
本文得到四川省电力电子节能技术与装备重点实验室资助项目(SZJJ2016-049),西华大学自然科学重点基金资助项目(z ̄1 ̄6 ̄2 ̄0 ̄9 ̄06)资助,谨此致谢!
猜你喜欢
汽车实用技术(2022年5期)2022-04-02 09:36:22
石家庄铁路职业技术学院学报(2021年1期)2021-06-09 06:06:38
新能源科技(2021年6期)2021-04-02 22:43:34
科学技术创新(2021年7期)2021-03-23 06:37:42
成都信息工程大学学报(2020年5期)2020-07-29 08:50:12
西南交通大学学报(2016年3期)2016-06-15 20:29:35
通信电源技术(2016年4期)2016-04-04 02:57:38
电测与仪表(2015年21期)2015-04-09 11:52:16
电测与仪表(2015年11期)2015-04-09 11:46:14
燕山大学学报(2014年2期)2014-03-11 15:28:26