行人过街安全研究进展
2022-05-26 01:56:46陈鑫宋臻高艺轩彭金栓
人类工效学 2022年2期
陈鑫,宋臻,高艺轩,彭金栓
(重庆交通大学 交通运输学院,重庆 400074)
1 引言
行人无其他交通工具庇护直接暴露于交通环境中,一旦发生交通事故往往会受到严重的伤害甚至死亡,威胁行人的生命财产安全。在交通系统中,行人过街是行人最直接与车辆交互的情况,当行人与车辆产生冲突时,行人的安全则无法得到保障,且不合理的行人过街行为可能会阻断交通流造成交通拥堵,降低路网的通行能力,因此对行人过街的安全进行研究显得十分必要。
在实际的行人过街行为中,其过街目标的实现不是一个简单的动作,而是包括位置的选择、观察、感知、判断、决策、最终完成过街的一个复杂、连续的过程。在信号控制交叉口,行人可以借助斑马线、信号灯等设施的保护穿越机动车道,较无行人保护措施的其他环境过街而言,依然存在与机动车流、非机动车流产生冲突的问题。通过探索行人过街规律,合理配置行人过街基础设施、优化行人过街信号配时、加强行人交通管理可以提高行人过街的效率和安全性,减少行人道路交通伤亡。针对行人过街安全方面的研究,从行人过街交通特性和行人与车辆冲突两个方面进行梳理,首先探索行人过街速度影响因素,剖析典型的违章过街行为和使用手机过街行为的行人过街心理,介绍行人过街与车辆产生的交通冲突和常用的人车冲突安全指标,拟从行人与自动驾驶汽车交互着手对行人过街安全研究进行展望。
2 行人过街交通特性
2.1 行人速度特性
行人过街速度是交通工程中信号交叉口基础设施设计的重要设计参数,一直是行人交通特性的研究热点。行人必须根据过街的时间和空间限制做出过街决定,对行人过街速度估计过高或过低都会影响交叉口的通行效率。因此,研究行人过街速度可以了解行人过街的交通特征,进而探索行人过街行走规律,对提高信号交叉口的安全性和效率也十分重要。
针对行人过街速度的影响因素的研究,许多学者将年龄因素作为主要的分析对象。研究发现中青年群体的过街速度大于老年群体的过街速度[2-3]。针对老年人的过街速度特性,张惠玲等[4]建议当老年行人的比例大于14%的时候,为满足老年人过街舒适性和安全性的要求,应该采取0.97 m/s的速度设计值。性别因素对过街行人速度的影响,则存在男性比女性快[2-3]和无显著影响[4]两种结论。另外,过街人群规模也对行人过街速度影响也较为显著,行人过街速度随着行人的数量的增加而降低[3]。
考虑其他因素对行人过街速度的影响,冯树民等人[5]通过调查得到信号交叉口绿灯后期行人过街速度达到1.84 m/s。Muley等人[6]通过研究发现行人进入街道的速度受行人信号灯指示的显著影响,离开街道的速度与人行横道长度无关,但受过街方向影响显著。裴玉龙等人[7]发现冬季行人的过街速度大于夏季,Al-Musawi等人[8]发现穿西式服装的男性行人比穿阿拉伯风格的男性行人的过街速度快11%,服装风格对女性行人的影响不显著。Goh等人[9]发现不携带任何物品的行人比携带物品的行人走得更快。
行人过街影响因素涉及人、车、路等多方面,年龄因素的行人过街速度研究较多,但是过街行人规模、性别、行人过街信号、季节等因素也都被考虑。但是在不同城市、不同交叉口,行人速度特性也会存在差异,如何将行人过街速度匹配不同场景条件,为城市信号控制设计和过街基础设施设计提供相关量化数据也是未来研究的一个方向。
2.2 行人视觉特性
眼球追踪是一种运用眼动追踪设备通过记录眼睛位置及其运动状态并进行视线测量的技术。如今眼动追踪技术已经应用到人类步行领域,行人过街作为一种特定的步行形式,了解行人过街的眼动特性,进而分析行人过街的视觉搜索过程,对交叉口设施设计及信号控制配时设计具有重要参考意义。
行人过街视觉搜索主要是为了收集周围交通环境视觉信息,从而为过街决策提供参考信息。通过研究发现,年龄因素对过街行人视觉特性的影响显著,表1总结了部分探索行人年龄因素对行人过街视觉特性影响的眼动追踪实验,发现儿童更关注突出的无关过街的因素,成年人能更好地通过视觉搜索获取各个方向的信息,而老年人过街时则更关注过街路径。
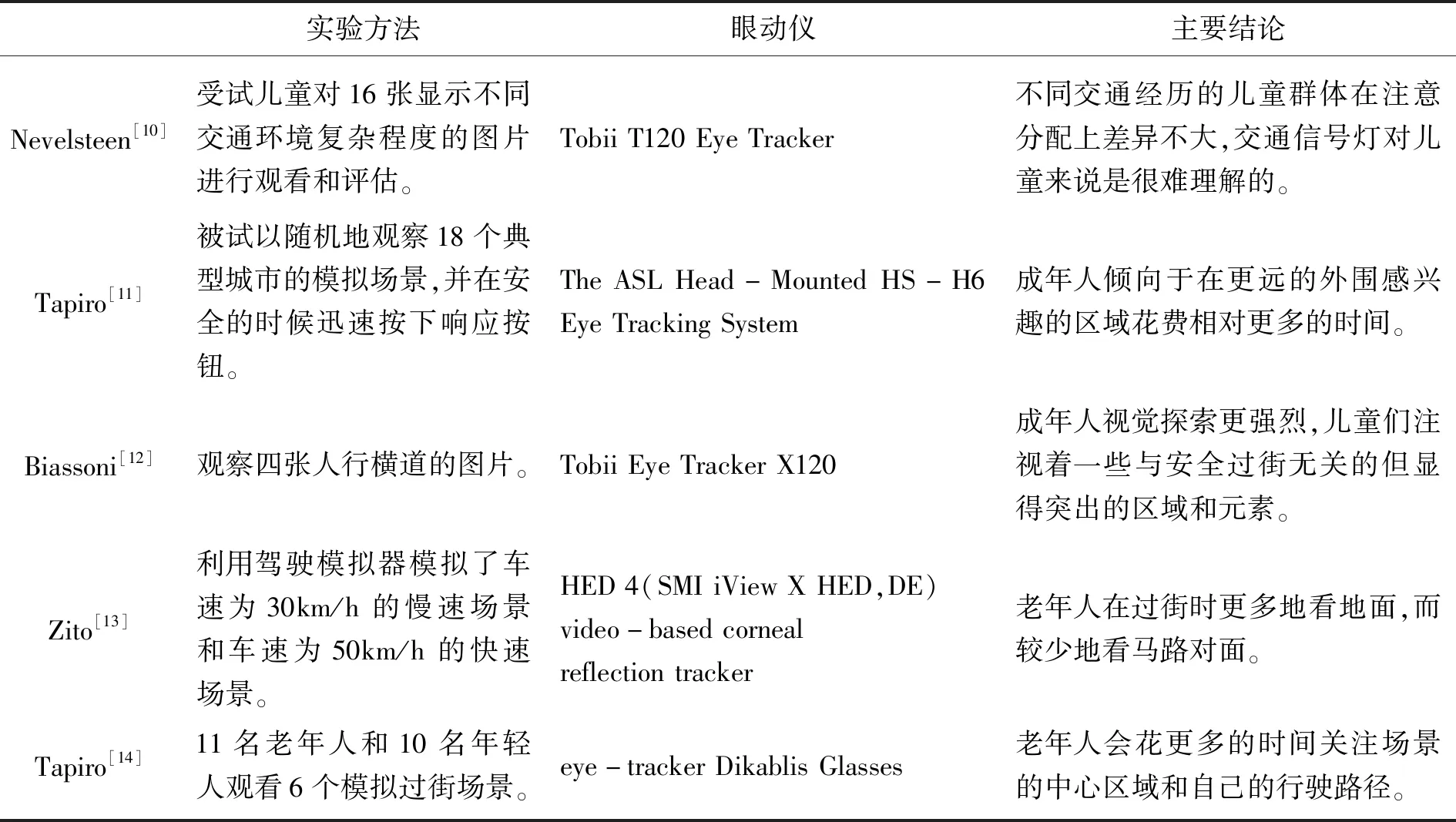
表1 年龄对过街行人视觉特性的影响
此外,交叉口信号控制方式以及行人手机使用情况也对行人过街眼动特性有影响。丁袁[15]通过在信号控制交叉口和无信号控制交叉口的行人眼动探索实验,发现无信号控制下行人更多地关注左侧注视区域,信号控制下行人则偏向于中部注视区域,无信号控制行人过街比较紧张,视负荷大于信号控制。Tapiro[16]发现使用手机会使行人对是否能安全过街的反应较慢,并且对场景外围区域的视觉注意力分配较少。凌飞阳[17]得出听音乐、打电话和发信息能够分散的行人的注意力,导致行人左右观察交通情况和扫视频率降低的结论。
利用眼动追踪实验探索行人过街视觉特性,目前从行人的角度出发的研究较少。大部分的研究都是探索年龄因素对行人过街眼动特性的影响,而交叉口信号控制方式、行人过街状态等也是重要影响因素。另外眼动追踪实验应该合理选择实验条件,真实过街的实验条件能够较好地采集行人过街眼动数据,而虚拟现实模拟则更加安全。后续对行人视觉特性的研究应该结合行人的其他交通特性,比如行人过街速度。
2.3 行人心理特征
行人过街存在典型的违章和使用手机两种不安全过街行为。在信号控制交叉口,如果行人红灯时间过长且出现可穿越间隙时,行人会违章过街。而过街时使用手机则是行人分心的一种体现,会忽略潜在的冲突隐患。从行人的心理特性方面剖析两种过街行为能够了解行人过街决策心理以及为减少行人过街事故而提出相应解决措施。
对于行人违章过街,“中国式过马路”就是体现了从众心理,张国强等人[18]发现当较多行人一起过街时,拥有共同的行为目标,会形成心理学上的群体,会获得了更加安全的心理感受。基于从众心理动态群体决策理论,过街人群中冒险型人群居多时,会带动其他过街行人违章过街[19]。陆百川等人[20]等将行人的心理认知意识以及行人感受到的环境通过场的形式,去判断客体对行人的作用强弱,因此,行人违章过街心理受其他行人和外界环境的影响,大多都不是故意而为之[21]。
对于行人使用手机过街的行为,Horberry等人[22]在调查中发现20%的行人在过街时使用智能手机,而听音乐和发短信或与设备交互是观察到的行人智能手机设备使用最多的功能。Zhang等人[23]发现在无信号控制交叉口使用手机过街的行人中64.1%是年轻行人。从心理角度而言,边过街边使用手机是由心理依赖引起的一种过街分心现象,而在短短的过街期间,行人使用手机最可能是在与关系亲密的人进行社交,相关研究发现,31.2%的行人最有可能与朋友交流,24.5%与配偶交流[24]。Appel[25]将行人走路频繁地使用手机归因于社交恐惧,认为他们使用手机是为了避免错过社交。对该行为进行干预,应该同时考虑行人和他们社交对象。
行人违章过街与行人使用手机过街都属于不安全过街行为,从心理层面讲,研究较多的是行人违章过街的从众心理,而行人使用手机则被描述为社交心理依赖。结合行人的过街心理,针对性地采取管理、干预措施,能够有效地减少行人过街安全隐患,所以结合过街设施形式、过街信号控制方式以及周围行人影响等不同交通场景信息全面地分析行人过街的交通心理是必要的。
3 过街行人与车辆冲突
3.1 交通冲突技术
交通冲突是用于评估交通安全提出的替代安全措施最常用的指标,就是指两个或两个以上的道路使用者,在时间或空间维度上相互接近,如果一方采取转换方向、突然停车等交通行为,另一方若不采取避险措施,在某一程度就会产生碰撞的一种现象。利用CiteSpace软件分析近五年交通冲突相关文献,通过图1能够得到交通冲突是交通安全研究的重要问题,并且主要是围绕城市交通以及交叉口进行的研究,交通冲突技术是进行交通安全评价的有效手段。
图1 交通冲突研究关键词共现图谱
在城市交通中行人和车辆共享道路,驾驶员与行人之间的相互作用是一个复杂的动态分析问题。行人在交叉口过街时与各个方向的来车都会产生冲突,如图2所示。在信号控制的条件下,虽然通过信号相位从时间上分隔了行人与机动车流,但是不受信号控制的右转车辆与过街行人仍然存在明显的冲突,另外当行人无法在绿灯时间完成过街,就会与下个相位获得路权的其他方向车辆产生冲突。人车冲突随着交通量的增长而增加,在分析交叉口的安全性时需要更多地关注人车之间的交互作用。

图2 交叉口人车冲突示意图
3.2 人车冲突指标应用
为了交通冲突进行分析处理,国内外学者提出了许多交通安全指标。而人车冲突安全指标使用频率最高的是基于时间近端的碰撞时间(Time-To-Collision,TTC)和后侵犯时间(Post-Encroachment-Time,PET)。图3展示了两种指标的应用情景,具体计算如式(1)、(2)、(3)。TTC是当两个道路使用者在同一路径上保持当前的交通行为,不采取任何的规避措施会发生碰撞的时间。而PET则是一个道路使用者离开潜在碰撞区域到另一个道路使用者到达碰撞区域的时间。对比两种指标,TTC比PET更常用,适用于追尾、转弯、行人过街与行人的碰撞。而PET只有在直角碰撞的情况下使用,较TTC而言更适合交叉冲突。
图3 人车冲突指标PET和TTC示意图[26-27]
PET=t1-t2
(1)

(2)
(3)
式中:t1车辆通过冲突点的时刻;t2为行人到达冲突点的时刻;V1、V2分别为车辆和行人的速度;D1为车头到冲突点的距离;D2为行人到冲突点的距离;L、W分别为车长和车宽。
针对PET和TTC指标,Chen等人[28]选取了PET和速度指标进行仿真再现车辆和行人在不同几何布局和操作条件下的随机行为,发现交叉口尺寸和转角越大,交叉口的安全性能就越差。Kumar等人[29]选取了PET指标来分析信号交叉口行人与右转车辆的冲突情况,当PET值较低时,发生冲突的概率较高。另外,Wu等人[30]使用仿真模型(VISSIM)和替代安全评估模型(SSAM)研究发现当最大TTC和PET阈值分别为2.7 s和8 s时平均绝对百分比误差值最低,但是VISSIM模型可能会忽略行人的违章行为。Zheng等人[31]发现结合TTC和PET的二元极值模型的估计精度最高,比选用单一指标分析更可靠。
除此之外,大多数现有的交通冲突指标没有充分考虑发生碰撞后造成的伤害的严重程度,大多数已开发的指标将交通事故的严重程度表示为它们与碰撞在时间或空间上的接近程度。而单一的指标也都存在各自的局限,在研究过程中应该更多地去选择合适的安全指标,并结合多种安全指标建立综合模型进行预测或评估,能够有效地去保留各项指标的优点并合理地走出局限,并且能针对新的发现提出新的指标。
4 行人过街安全研究展望
随着自动驾驶技术蓬勃发展,未来的交通环境混合而复杂。自动驾驶汽车与其他道路使用者之间的安全互动是一个亟需解决的问题,车辆行驶过程中的机械故障和驾驶员驾驶行为差错会导致人车交互失衡[32],增加交通事故发生的概率,仅靠对自动驾驶汽车的精准控制和对所有交通规则的精确掌握不足以保证其在城市环境中安全驾驶。在传统的交通场景中,车辆与行人之间主要是通过眼神、手势等非语言线索进行信息交互的,自动驾驶汽车则需要更多行人交互信息和环境交互信息进行相关驾驶决策。
为了更安全地进行行人与自动驾驶汽车交互实验研究,国外学者提出了一种让驾驶员穿上类似座椅的服装驾驶汽车的“幽灵司机”方法[33],并且要考虑行人过街可接受距离、行人速度以及车辆等交互因素对行人的影响。自动驾驶汽车外部的人机界面可以指示车辆的预期动作,协助行人与自动驾驶汽车交互。Bindschadel等[34]通过实验发现行人在遇到带有外部人机界面的自动驾驶汽车时,过街时会感觉更安全。关于外部人机界面显示信息,Bazilinskyy等[35]调查得到以行人为中心的绿色文本信息是最清晰的,但是需要考虑文本指示信息的技术可行性,对于人机界面的位置,保险杠和车顶比挡风玻璃好。
虽然有越来越多的关于自动驾驶技术相关的研究,但是自动驾驶汽车引入真实道路环境还需要一段时间,现阶段行人过街安全的研究能够作为后续研究行人与自动驾驶汽车交互安全的基础。行人过街速度用于行人轨迹预测进而作为自动驾驶轨迹规划的依据;行人过街视觉特性能够了解行人获取交通信息的特点,为外部人机交互界面设计提供参考;行人过街心理则可以作为自动驾驶汽车与行人交互的特殊情况的判断依据,进而可以研究行人违章或是其他特殊过街情况下自动驾驶系统的处理技术;人车冲突研究可为未来过街行人与自动驾驶汽车冲突分析提供参考。
5 结语
(1)大多数研究中行人过街速度仅取决于行人过街时间和人行横道长度,缺乏对行人过街过程中速度变化特征的体现。通过眼球追踪实验探索行人的视觉特性,从行人的角度出发进行的研究较少。而行人心理特性的研究能够解释行人的过街行为,其他交通特性的变化规律很大部分都取决于行人过街心理,后续的研究中应该合理地结合行人的速度特性、视觉特性、心理特性、生理特性等特性,探讨各种特性之间的内在联系。
(2)交通冲突技术是分析交通安全的重要技术,TTC和PET是最常选用的安全指标,现有研究较多地独立分析各项指标的影响,结合不同指标能够得到更好的评价和预估效果,在现有指标的基础之上,新指标的提出能够完善交通安全评价体系。
(3)自动驾驶汽车与行人的安全交互可以保证交通环境的安全,外部人机界面能够帮助行人在有自动驾驶车辆的情况下做出过街决策。未来行人过街安全方面的研究应在当前研究的基础之上更多地去考虑自动驾驶汽车引入城市道路后对过街行人的影响。
猜你喜欢
华南理工大学学报(自然科学版)(2023年8期)2023-11-24 02:59:30
意林(2021年5期)2021-04-18 12:21:17
扬子江(2019年1期)2019-03-08 02:52:34
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32
黑龙江交通科技(2017年8期)2017-03-03 14:39:31
中国房地产业(2016年2期)2016-03-01 01:25:37
科技视界(2015年27期)2015-10-08 11:06:49
系统工程学报(2015年3期)2015-02-28 19:54:01
河南科技(2014年14期)2014-02-27 14:12:02