
搭接相位信号交叉口非机动车过街行为分析
2023-11-24 02:59温惠英刘浩杜颖新赵胜
华南理工大学学报(自然科学版) 2023年8期
温惠英 刘浩 杜颖新 赵胜
(华南理工大学 土木与交通学院,广东 广州 510640)
近些年对于市域范围内的短距离出行,越来越多的城市居民倾向于选择非机动化交通工具代步,然而随着非机动车使用率的不断增加,各类交通安全问题日益凸显,根据国家统计局的官方数据,2021年非机动车交通事故发生数达到35 141起,死亡人数4 525,受伤人数40 156,财产损失达到8 032万元[1]。在诱发非机动车交通事故的诸多因素中,非机动车在信号交叉口处的违法过街行为是主要原因之一。因此,研究非机动车在信号交叉口的过街行为及其影响因素对减少交通事故的发生具有重要意义。
目前,国内外已有学者对非机动车过街行为进行分类研究,根据非机动车在过街前的等待选择差异将非机动车过街行为分为冒险型、机会型和守法型3类[2-4]。其中冒险型和机会型过街行为都属于违法闯红灯过街行为,故闯红灯过街行为的影响因素是本研究的重点研究对象。目前国内外学者对过街行为影响因素的研究主要集中在违法闯红灯过街行为领域,研究发现非机动车过街行为的影响因素常常与骑行者个人属性、出行行为属性和交通环境属性等因素有关。高纯[5]建立了电动自行车闯红灯行为的Cox风险模型,研究发现天气、过街区域和载人因素对闯红灯过街具有显著影响。Bai 等[6]建立随机参数Logit 模型研究骑行者闯红灯倾向与可能因素的关系,结果显示自行车群体规模、交通流量状况、道路几何形状和交通控制属性等因素会影响骑自行车的人闯红灯的倾向。Pai 等[7]构建了非机动车闯红灯行为的混合Logit 模型,结果发现红灯持续时间、十字路口类型、骑手身份、骑手是否佩戴头盔等因素与非机动车闯红灯显著相关。然而,在交通环境属性方面,现有研究主要集中在机动车交通量、信号配时、交叉口类型等方面,而未考虑到交叉口控制方案对非机动车过街的影响。交叉口控制方案分为信号交叉口和无信控交叉口。相比无信号控制的交叉口,信号交叉口可以研究信号周期、相位设置、红灯时间等因素对非机动车过街行为的影响,从而更全面地考虑交通环境属性的影响,而信号交叉口又可细分为单口轮放、对称放行和搭接相位控制的信号交叉口[8],其中,搭接相位控制的信号交叉口是近年来重点研究的对象。王进等[9]引入合流相位,研究了各类搭接相位模式,研究表明搭接相位的设置提高了各流向的绿灯时间利用率,从而增加了交叉口的通行能力。苏灿航等[10]引入搭接相位的配时方法,并利用VISSIM仿真软件对实际平面交叉口进行仿真,结果表明利用搭接相位配时方法针对早高峰拥堵严重的进口道效果显著。然而目前对搭接相位控制信号交叉口的相关研究主要侧重于机动车通行相位设计与配时优化,很少有学者就搭接相位控制方案的应用对非机动车过街行为的影响开展相关研究。另外,在研究方法方面,目前常采用的方法包括传统统计模型方法和机器学习方法,在处理非机动车闯红灯过街问题上大多数学者采用Logit模型进行分析[5,8,11]。然而由于统计模型对解释变量和响应变量有严格的假设,而且还不能够全面考虑数据的特征,故在处理分类问题上可能弱于机器学习模型。
鉴于以上分析,本研究通过调研获取了广州市典型的搭接相位控制信号交叉口的非机动车过街数据。考虑到信号周期内不同时段对非机动车过街行为的影响,将一个完整的信号周期按照非机动车的风险冲突划分为4个风险时段,并将非机动车过街行为分为冒险型、机会型和守法型3类,构建C5.0决策树模型分析个体、行为、环境等因素对3类过街行为的影响,并分析评价模型的分类效果,以期为交通管理提供理论依据,提高交叉口非机动车通行的安全水平。
1 数据准备
1.1 数据来源及处理
为获取非机动车过街行为数据,在非机动车出行的高峰时刻采用摄像机录像法调查了广州市内10个典型的搭接相位控制的信号交叉口,部分调查地点如图1所示。

图1 非机动车过街行为部分调查地点实景Fig.1 Real view of the investigation site of the non-motor vehicle crossing behavior
搭接相位控制方案是近年来信号交叉口主要采用的一种控制方案,搭接相位是指在某相位结束之前,提前起动另一个相位的一股或多股车流,或者在某相位开始之前,提前结束其前期相位的一股或多股车流,即两个相位之间存在部分车流的搭接。搭接相位控制方案能有效缓解交叉口各流向间饱和度不均衡现象,提高各流向的绿灯时间利用率,从而增加了交叉口的通行能力。本研究信号交叉口的选取规则如下:
(1)具有一定的代表性。交叉口的几何设计为当地及国内其他城市较为典型的情况,且至少存在一个进口采用搭接相位控制方案。
(2)非机动车流量合理。单个信号周期内的过街非机动车数量较多,且在非机动车红灯信号期间到达交叉口的车辆应占据较大比例。
(3)各信号交叉口基本特征较为相似。各交叉口进口的渠化方式及特征、机动车交通信号灯的类型等无关要素宜相同或相似。
(4)研究因素之外的影响较少。交叉口宜与周边环境相对独立,如:附近无道路施工点、下游路段的交通拥堵不会影响上游机动车的正常通行、交叉口处无交警或交通协管员值守等。
通过对采集到的视频数据进行特征提取,获取了骑行者性别、骑行者年龄、车辆类型、骑行者身份、等待情况、闯红灯情况、骑行状态、过街方式、过街区域、过街轨迹、到达时期、机动车车道数、机动车流量、非机动车信号灯设施、信号周期、红灯时间等数据,通过筛选最终得到非机动车过街的有效数据10 733个。
1.2 非机动车过街行为分类
本研究根据相关学者的研究[2-4]以及非机动车在交叉口的等待选择和闯红灯情况,将非机动车过街行为分成冒险型、机会型和守法型3类。冒险型过街是指非机动车在红灯信号期间到达交叉口后,不遵循信号灯指示停车等待而直接穿越;机会型过街是指非机动车在红灯信号期间到达交叉口后,先遵循信号灯指示停车等待,而后寻找间隙伺机穿越;守法型过街是指非机动车在红灯信号期间到达交叉口后,始终遵循信号灯指示停车等待,直至绿灯启亮后再穿越。3 类过街行为的特征如表1 所示。3 类过街行为的数据样本量依次为4 757、2 689、3 287,将3 类过街行为数据集依照7∶3 的随机抽样规则拆分为训练集和测试集,训练集样本量依次为3 330、1 882、2 301,测试集样本量依次为1 427、807、986。

表1 3类非机动车过街行为特征表Table 1 Table of characteristics of three types of non-motor vehicle crossing behavior
1.3 非机动车风险时期划分
为了研究非机动车到达路口时所处红灯时期对过街行为的影响,本研究将红灯时期划分为红灯初期、红灯稳定期和红灯末期3个时段[12]。其中红灯初期定义为非机动车红灯时间的最初5 s;红灯末期定义为非机动车红灯时间的最后5 s;红灯稳定期定义为介于红灯初期与红灯末期之间的时段。另外,为了深入分析搭接相位控制下信号交叉口不同时段的风险情况对非机动车过街行为的影响,本研究按照非机动车过街时的风险冲突将一个完整的信号周期划分为对向绿灯风险期、同向绿灯安全期、同向绿灯风险期和垂直方向风险期4 个时段,如图2 所示。由于本研究所定义的风险为非机动车闯红灯和正常行驶的机动车冲突所造成的风险,所以风险期皆为非机动车信号灯为红灯的时期。以一个非机动车的行驶方向为例,4个风险时期的定义如下:
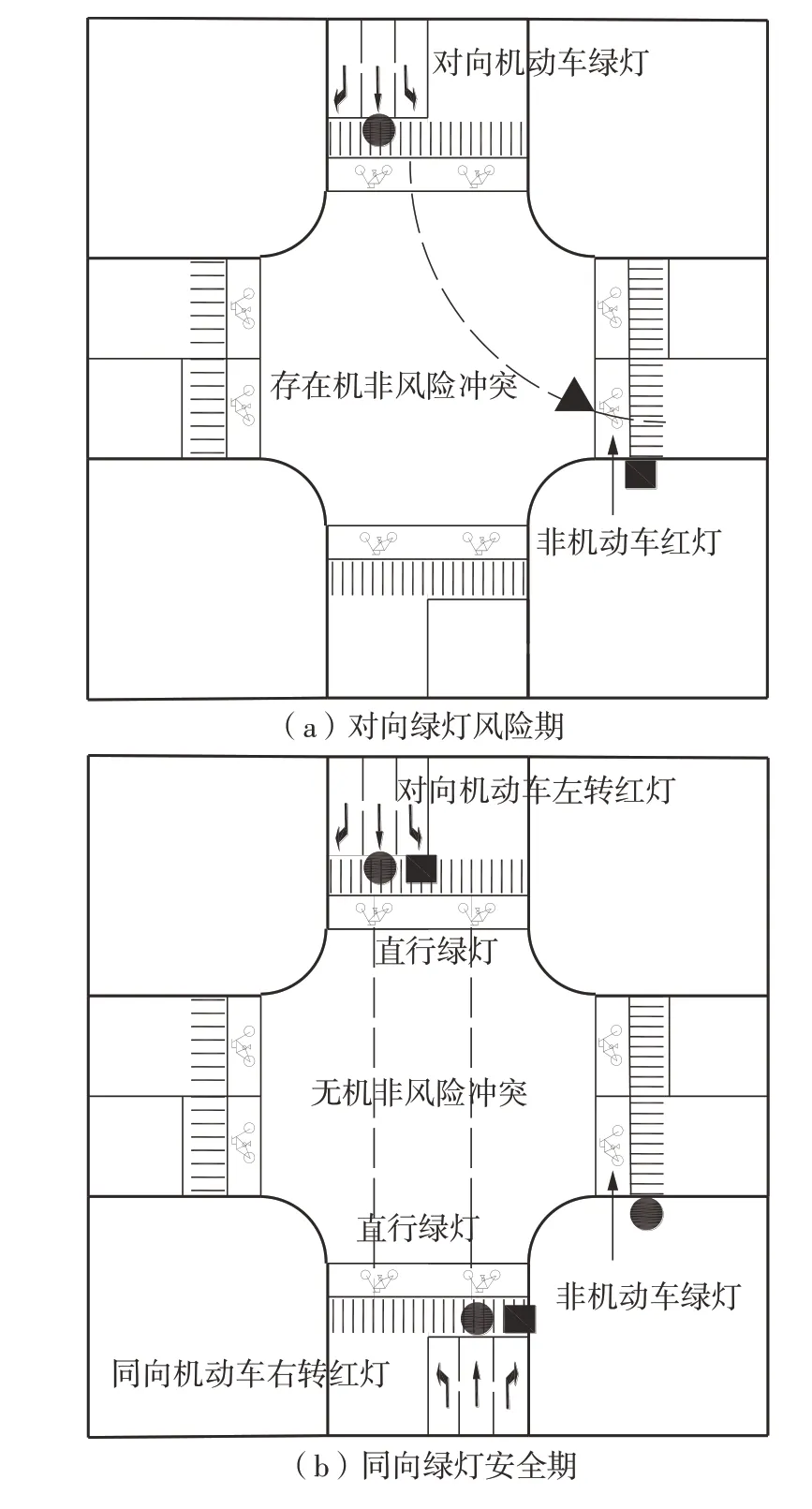
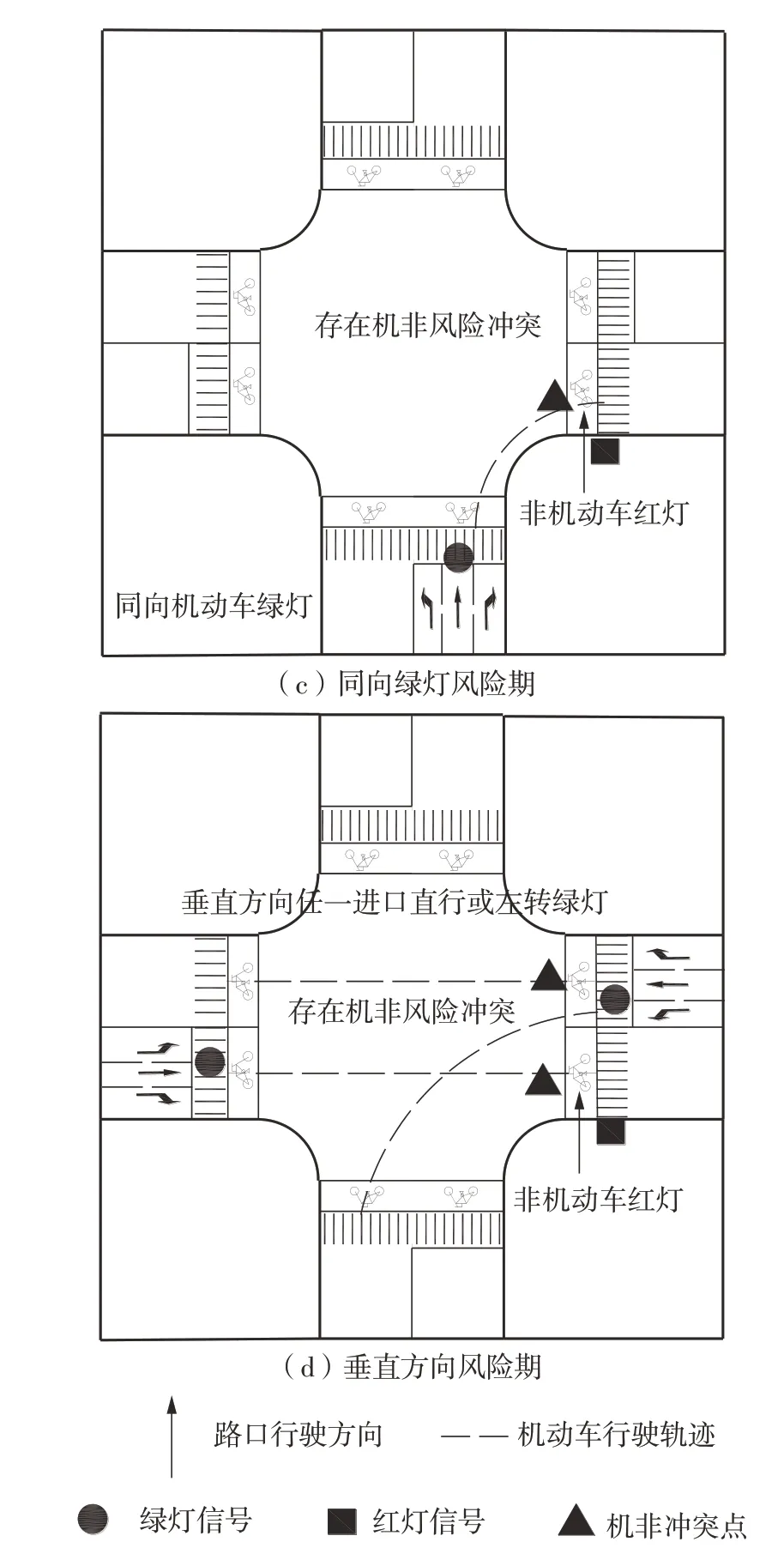
图2 风险时期划分示意图Fig.2 Schematic diagram of the breakdown of risk periods
(1)对向绿灯风险期定义为当一个方向的非机动车红灯信号亮起,而对向进口道各个方向机动车被赋予绿灯且为单口放行状态时的时段;
(2)同向绿灯安全期定义为当一个方向的非机动车信号灯绿灯亮起,同向和对向的直行机动车信号灯均处于绿灯状态时的时段;
(3)同向绿灯风险期定义为当一个方向非机动车红灯信号亮起,而同向进口道各方向机动车被赋予绿灯且为单口放行状态时的时段;
(4)垂直方向风险期定义为当一个方向非机动车红灯信号亮起,而垂直方向上任一进口的直行或左转机动车被赋予绿灯、准许放行的时段。
2 模型方法
2.1 C5.0决策树算法
决策树算法是以原始数据为基础的归纳学习方法,属于有监督学习方法的一种,是机器学习中比较经典的算法之一。相较于其他学习方法,决策树模型结构简单,易于理解,并且具有较高的可解释性,故迄今为止,仍是解决特征因素分类或特征变量回归的主流方法之一,在交通领域取得了广泛的应用。
本研究采用决策树算法中的C5.0算法研究非机动车过街行为的影响因素,C5.0算法引入了自适应增强Boosting 技术,以信息增益率作为最优影响因素选择的依据,且C5.0算法在选择用于分割样本数据集的特征因素时,并非直接选用信息增益率最大的属性,而是先从特征因素中找出信息增益高于平均水平的所有属性,再从中挑选信息增益率最大者作为分割依据。信息增益率的计算方法[13]如下。
(1)计算熵
熵指标用于度量样本数据集的不确定性,熵越大,不确定性也越大。对于某一训练样本S,其熵值E(S)可通过式(1)计算[13]:
式中,pi表示具有第i类特征属性的观测个体在全体样本中所占的比例,n表示特征属性的数量。
对于某一属性A,假设其下存在V项取值,若选择该属性分割样本集合,则会相应地产生V个分支。经此分割后的训练样本集合的熵值可通过式(2)计算[13]:
式中,E'(S)表示以特征属性A为样本分割依据、经分割后的训练样本集合S的熵,E(Sj)表示第j分支所对应数据子集的熵,wj表示取值为特征属性A下第j项的观测个体在全体样本中所占的比例,m表示特征属性A可取值的数量。
(2)计算信息增益率
信息增益是样本数据集分割后不确定性的减少程度,以特征属性A分割训练样本集合S得到的信息增益G(S,A)如式(3)所示,信息增益率H(S,A)则可由式(4)计算[13]:
式中,I(A)表示以特征属性A下第j项取值分割训练样本集合S的熵。
2.2 模型变量选择
根据现有研究基础以及调查的过街数据,本研究从非机动车骑行者的个体属性、出行行为以及信号交叉口的交通环境3个方面选择若干因素用于特征数据的提取及处理,由于非机动车在过街前的等待选择和闯红灯与否是判别3类过街行为的关键要素,故在进行模型构建时需要剔除。最终,本研究共选取了17 个特征因素,其特征变量编码及描述性统计如表2所示。

表2 特征变量编码及统计Table 2 Feature variable coding and statistics
表2中特征因素过街风险定义为非机动车过街时与机动车之间产生的风险;车道数定义为非机动车过街时穿越的机动车道数,即垂直方向道路双向车道数;冲突机动车流量定义为一次非机动车红灯时间内与过街非机动车构成冲突的来自各方向的机动车流量之和。
3 结果分析
3.1 模型分类效果评价
为了评价决策树模型的分类效果,本研究得出了3 类过街行为测试集的预测结果混淆矩阵,如图3所示。
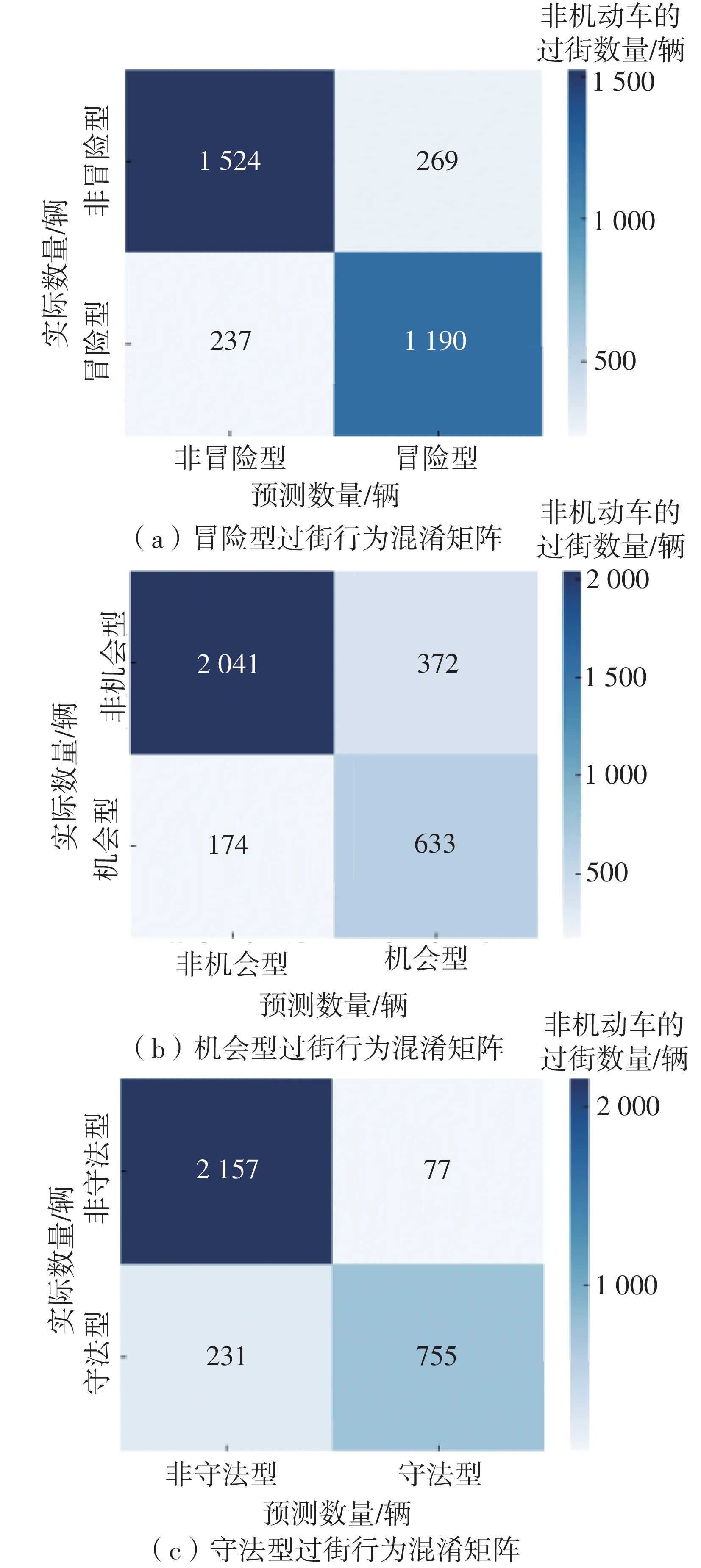
图3 3类过街行为的预测混淆矩阵Fig.3 Predictive confusion matrices for three types of street crossing behavior
根据混淆矩阵和式(5)-(7)得到的模型准确率、精确率、召回率情况如表3所示。表3中,0表示未发生此类过街行为,1 表示发生此类过街行为。可以看出,3 类过街行为预测结果的平均准确率可以达到85.92%,且平均精确率和平均召回率都可以达到80%以上,说明模型的预测精度较高。但是,机会型和守法型过街行为的测试精确率和召回率存在低于80%的情况,即模型对机会型和守法型过街行为的预测精度低于对冒险型过街行为的预测精度,本研究推测这种情况可能是由于测试数据集的类不平衡现象造成的。数据样本量的不平衡导致冒险型过街行为的预测精度明显高于其他两类,为了提高模型的整体预测精度,后续可以采用不平衡数据集的决策树算法或者对数据样本量进行平衡等方法进行研究。
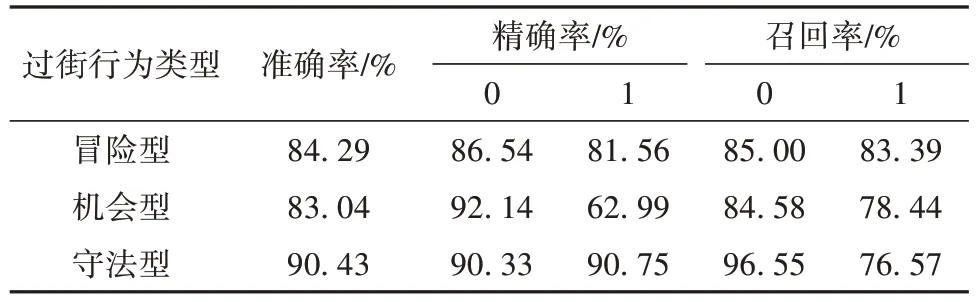
表3 3类过街行为预测结果性能指标Table 3 Performance indicators of three street crossing behavior prediction results
式中:F表示准确率,Q表示精确率,R表示召回率,T1表示实际值为正结果预测为正,T2表示实际值为负结果预测为负,N1表示实际值为正结果预测为负,N2表示实际值为负结果预测为正。
考虑到测试数据集中的类不平衡现象可能会对预测结果的准确率产生影响,在采用上述指标评价前述决策树模型的判别性能的同时,也利用ROC曲线和AUC 值开展进一步分析,AUC 值为ROC 曲线下的面积,ROC 曲线全称为受试者工作特征曲线,是反映敏感度和特异性连续变量的综合指标,当AUC值介于0.5~1.0时,模型预测效果则优于随机猜测,AUC的值越大,模型的性能越好,且在设定恰当阈值的情况下,模型将具有较高的预测价值[14-15]。图4 示出了3 类过街行为的判别决策树ROC曲线。可以看出,冒险型、机会型、守法型过街行为决策树模型测试结果的AUC 值分别为0.920、0.880、0.953,模型整体预测性能良好,且阈值设定分别为0.565、0.472、0.351 时,模型能够取得最优的预测效果。

图4 3类过街行为ROC曲线Fig.4 ROC curves for three types of street crossing behavior
3.2 冒险型过街行为的影响因素分析
冒险型过街行为决策树模型结构如图5 所示,可以看出,到达风险期因素为决策树的根节点,是冒险型过街行为中最重要的影响因素,非机动车信号灯设施、冲突机动车流量、车道数和过街风险为决策树的中间节点,对冒险型过街行为的发生均存在显著影响。
图5 冒险型过街行为决策树Fig.5 Decision tree for risky street crossing behavior
(1)对于对向绿灯风险期内到达的骑行者,未装设非机动车信号灯设施时发生冒险型过街行为的数量为498,分组占比达到了68.98%,而在设置有非机动车信号灯的交叉口,骑行者冒险过街行为则大大减少。其原因可能是,此时期内骑行者在缺乏非机动车信号灯给予清晰指引的情形下,倾向于跟随对向直行车流选择闯红灯过街。
(2)对于同向绿灯风险期内到达的骑行者,无论所在交叉口是否安装有非机动车专用信号灯,其发生冒险型过街行为的数量为1 817,分组占比高达83.69%。其原因可能是,同向绿灯风险期内非机动车与机动车冲突风险较小,骑行者为减少等待时间选择闯红灯过街。
(3)对于垂直方向风险期到达的骑行者,在单次红灯时间内冲突机动车流量大于30 辆的交叉口处,发生冒险型过街行为的情况相对较少,分组占比仅为6.31%,而在冲突机动车流量不超过30 辆而所需穿越车道数大于4的交叉口,骑行者冒险过街分组占比超过67%。其原因可能是,冲突车流量越小、垂直方向道路双向车道数越多,可供骑行者穿越的过街间隙越大,间隙数量也越多,骑行者觉得过街相对安全则选择冒险闯红灯过街。
(4)在垂直方向风险期内且双向车道数不超过4的交叉口,存在冲突风险车辆时超过50%的骑行者发生了冒险型过街行为,而在无冲突风险的环境下,发生了冒险型过街行为的骑行者分组占比仅为36.04%。该现象可能是受到其他影响因素的耦合作用而导致的,可能与交叉口处非机动车信号灯设施的安装情况有关,在存在过街风险的组别中,非机动车专用信号灯安装率仅为10.60%,而在无过街风险组别中,设施安装率则将近五成。在无装设非机动车信号灯设施的环境下,因缺乏对应信号灯的过街指引,且垂直方向道路双向车道数较少,冲突机动车车流量也较小,故发生冒险型过街的行为较多。
3.3 机会型过街行为的影响因素分析
机会型过街行为决策树模型结构如图6 所示。可以看出,车道数因素为决策树的根节点,是机会型过街行为中最重要的影响因素,红灯时间和到达风险期为决策树的中间节点,对机会型过街行为的发生均存在显著影响。
图6 机会型过街行为决策树Fig.6 Decision tree for opportunistic street crossings
(1)在车道数大于4 的交叉口,发生机会型过街行为的骑行者分组占比仅为5.77%。其原因可能是,骑行者穿越车道数较多的道路耗时较长,与机动车发生冲突的不确定性大大增加,尤其是在冲突机动车流量较大的情况下,骑行者过街或将更为谨慎。
(2)在车道数不超过4 而非机动车红灯时间大于120 s 的交叉口,发生机会型过街行为的骑行者数量为837,分组占比达到了73.55%。该现象的成因可能是,对应红灯时间超过了骑行者所能够接受的最大忍耐时间,所以骑行者选择放弃等待、伺机穿越。
(3)在所需穿越车道数不超过4 而红灯时间不超过120 s 的交叉口处,对向绿灯风险期与同向绿灯风险期内到达的骑行者中,发生了机会型过街行为的分组比重仅为12.24%。其原因可能是,在上述两个时期非机动车与机动车冲突风险相对较小,骑行者往往会直接闯红灯过街,较少骑行者会停车等待。
(4)在所需穿越车道数小于4 且为垂直绿灯风险期时,若红灯时间大于90 s,发生机会型过街的骑行者数量为471,分组占比为42.28%,保持其他特征因素取值不变,红灯时间减少至90 s以内,则发生机会型过街的骑行者数量为237,分组占比提高至75%。其原因可能是,冲突机动车流与非机动车骑行者几乎同时到达信号交叉口事件数大于骑行者较冲突机动车先行到达的情况,为了安全起见,大部分的骑行者需要先等待冲突机动车通过后,再行寻找合适的穿越间隙过街,因而导致机会型过街现象在此情景下较为突出。
3.4 守法型过街行为的影响因素分析
守法型过街行为决策树模型结构如图7 所示,可以看出,冲突机动车流量为决策树的根节点,是守法型过街行为中最重要的影响因素,信号周期、车道数、过街区域和过街风险为决策树的中间节点,对守法型过街行为的发生均存在显著影响。
图7 守法型过街行为决策树Fig.7 Decision tree for law-obeying street crossing behavior
(1)在冲突机动车流量不超过60 辆且信号周期不超过150 s 或是信号周期大于150 s 而车道数不超过4的交叉口,非机动车骑行者发生守法型过街行为的分组占比分别为9.86%和9.45%。这是因为冲突机动车流量较小时为骑行者提供了时间较长、数量较多的过街间隙,且在车道数较少的情形下,骑行者过街耗时更短,冲突风险更为可控,骑行者更倾向于闯红灯过街。
(2)若保持冲突机动车流量和信号周期不变,随着骑行者过街时所需穿越的车道数增加,守法过街的骑行者数量大大增加,当过街区域自到达至穿越始终在非机动车道上时,发生守法型过街行为的骑行者分组比重高达83.88%,而当过街区域涉及机动车道时,守法过街的骑行者分组比重值仅为44.36%。原因可能与在不同类型车道上行驶的骑行者对应的心理特征存在差异有关,在机动车道行驶的骑行者存在更为激进的冒险过街心理,并且由于搭接相位控制方案设置有同向绿灯风险期,非机动车更倾向此时期闯红灯且在机动车道上行驶,因而发生闯红灯过街行为的骑行者占比相对较大。
(3)在单次红灯时间内冲突机动车流量为60 辆以上的交叉口,当不存在过街风险时,发生守法型过街行为的骑行者数量为1 171,分组比重值高达91.41%,当存在过街风险时,发生守法型过街行为的骑行者数量为99,分组比重为39.92%。原因可能是冲突机动车流较大时,大部分骑行者为了安全起见选择守法过街。
4 结论
以搭接相位控制信号交叉口的非机动车为研究对象,将非机动车过街行为划分为冒险型、机会型、守法型3类,将信号周期划分为对向绿灯风险期、同向绿灯安全期、同向绿灯风险期和垂直方向风险期4个风险时段,并从个体、行为、环境方面选取了17 个自变量,构建C5.0 决策树模型进行非机动车影响因素分析,得到如下结论:
(1)本研究的C5.0 决策树模型测试结果显示,整体预测准确率大于83.04%,且AUC值大于0.880,3类过街行为决策树模型的预测精度均较优。
(2)搭接相位控制信号交叉口非机动车的过街行为主要与交通环境有关。到达风险期、非机动车信号灯设施、冲突机动车流量、车道数和过街风险对冒险型过街行为的发生存在显著影响,其中到达风险期为最重要的影响因素;车道数、红灯时间和到达风险期对机会型过街行为的发生存在显著影响,其中车道数为最重要的影响因素;冲突机动车流量、信号周期、车道数、过街区域和过街风险对守法型过街行为的发生存在显著影响,其中冲突机动车流量为最重要的影响因素。
(3)本研究结果显示非机动车的冒险型、机会型等闯红灯过街行为除了受到过街区域、机动车交通量、红灯时间等交通环境因素影响外,还与非机动车到达信号交叉口时所处的风险时期、车道数等因素显著相关,而与骑手的行为因素显著性较低。
猜你喜欢
作文·初中版(2021年12期)2021-09-15
科学大众(2021年9期)2021-07-16
——以呼和浩特市为例
交通工程(2021年1期)2021-03-16
作文周刊·小学一年级版(2020年40期)2020-10-19
廉政瞭望(2017年8期)2017-09-13
黑龙江交通科技(2017年8期)2017-03-03
汽车与安全(2016年5期)2016-12-01
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
武汉理工大学学报(交通科学与工程版)(2012年4期)2012-04-12
中国火炬(2010年5期)2010-07-25
