
一种低轨卫星高灵敏度辅助定位服务系统
2022-05-26 08:48梁晟溟董启甲范广腾
宇航学报 2022年4期
王 康,梁晟溟,董启甲,范广腾
(1.航天恒星科技有限公司,北京 100095;2.天津航天中为数据系统科技有限公司,天津 300301;3.军事科学院国防科技创新研究院,北京 100071)
0 引 言
卫星导航系统作为时空信息传递的重要手段,在国防安全建设领域发挥了极其重要的作用。随着中国北斗系统的全面部署完成,卫星导航定位功能已被大范围应用于军事装备中,作为搜救、制导、指挥作战等作战能力的核心科技手段。然而,卫星导航系统因其落地电平低的特点,在电子对抗过程中极易受到外部干扰而造成定位性能骤降的问题。在复杂电磁环境或遮挡环境下,卫星导航系统呈现出信号功率进一步降低、背景噪声抬高等特征,导致导航接收机因信噪比恶化而在预定捕获门限下无法捕获导航信号,因此,提升卫星导航系统的抗干扰和高灵敏度等核心技术指标是当前卫星导航领域技术研究的热点。
鉴于导航信号多为码分多址体制(Code division multiple access,CDMA),增加相干积分时长,是解决极弱电平、极低信噪比等问题的一种行之有效的手段。但由于电文跳变问题、多普勒效应、捕获效率等因素影响,不能无限度增加积分时长以获取信噪比提升,尤其在快速定位或高动态场景需求下,长时间相干积分往往会带来盲捕速度慢、捕获成功率低等突出问题。在此情况下,通常需要增加先验知识(星历获取、授时、多普勒)辅助,方可达到预期捕获效率。如:文献[17]通过惯导辅助二阶锁相环的方式实现了高动态、弱信号条件下的高精度频率估计;北斗三号卫星系统也通过增加导频通道实现了弱信号高灵敏度捕获效能;Giorgi等深入研究了导航系统对授时、守时能力的客观需求,给出了光频率基准和光通信系统辅助导航定位的应用等。在低轨导航增强系统论证中,研究者们将卫星导航与卫星通信系统相结合,在某种程度上有效利用卫星通信系统信道传输能力实现星历传输。
本文针对低信噪比环境下的快速定位需求,设计了一种可用于低轨卫星的高灵敏度辅助定位服务系统,结合低轨卫星信号落地电平高、多普勒变化速度快、过境位置变化速度快等突出特点,播发快速粗定位信标信号以实现地面终端在卫导静默条件下的初步时间获取,并通过低轨卫星长周期导航星座监测实现高准确率选星预报以辅助地面终端高效率捕获,进而达到快速高灵敏度定位的效能。
1 快速高灵敏度捕获关键要素分析
扩频信号捕获的核心思想是利用扩频伪码的自相关特性,将输入信号与本地产生的相互正交(相位相差90°)的两路载频信号(后文用I、Q表示)进行相关运算后,设置峰值判决门限以实现本地信号与接收信号的相位同步。在不考虑载波频差的情况下,伪码相关运算可抽象为如下公式:
(1)

1.1 积分时长对弱信号捕获灵敏度的影响
针对弱GNSS信号而言,单个伪码周期的相关运算峰值极低,无法满足捕获判决门限,极易出现误捕现象。因此,还需要通过相干积分和非相干积分等运算进一步提升信噪比以获得更高捕获成功率。相干积分和非相干积分表示如下:

(2)

(3)

=10lg()+10lg()-
(4)
式中,=2 MHz为扩频伪码带宽;=002 s,为GPS一个比特电文跳变以内的最大时长;定义为非相干积分次数;为平方损耗,根据经验,当输入弱信号载噪比为15 dB-Hz时,取11 dB。
1.2 长时间积分对捕获效率的影响
如前文所述,增加相干积分和非相干积分时长能够有效提升处理增益以提高捕获概率。在输入信号载噪比极低的情况下,由于非相干积分也引入了较大的平方损耗而对处理增益提升效果不明显,此时必须通过增加相干积分时长的方式实现。而电文比特翻转问题,是制约相干积分时长的最直接影响因素。在此进一步分析电文比特翻转问题如图1。
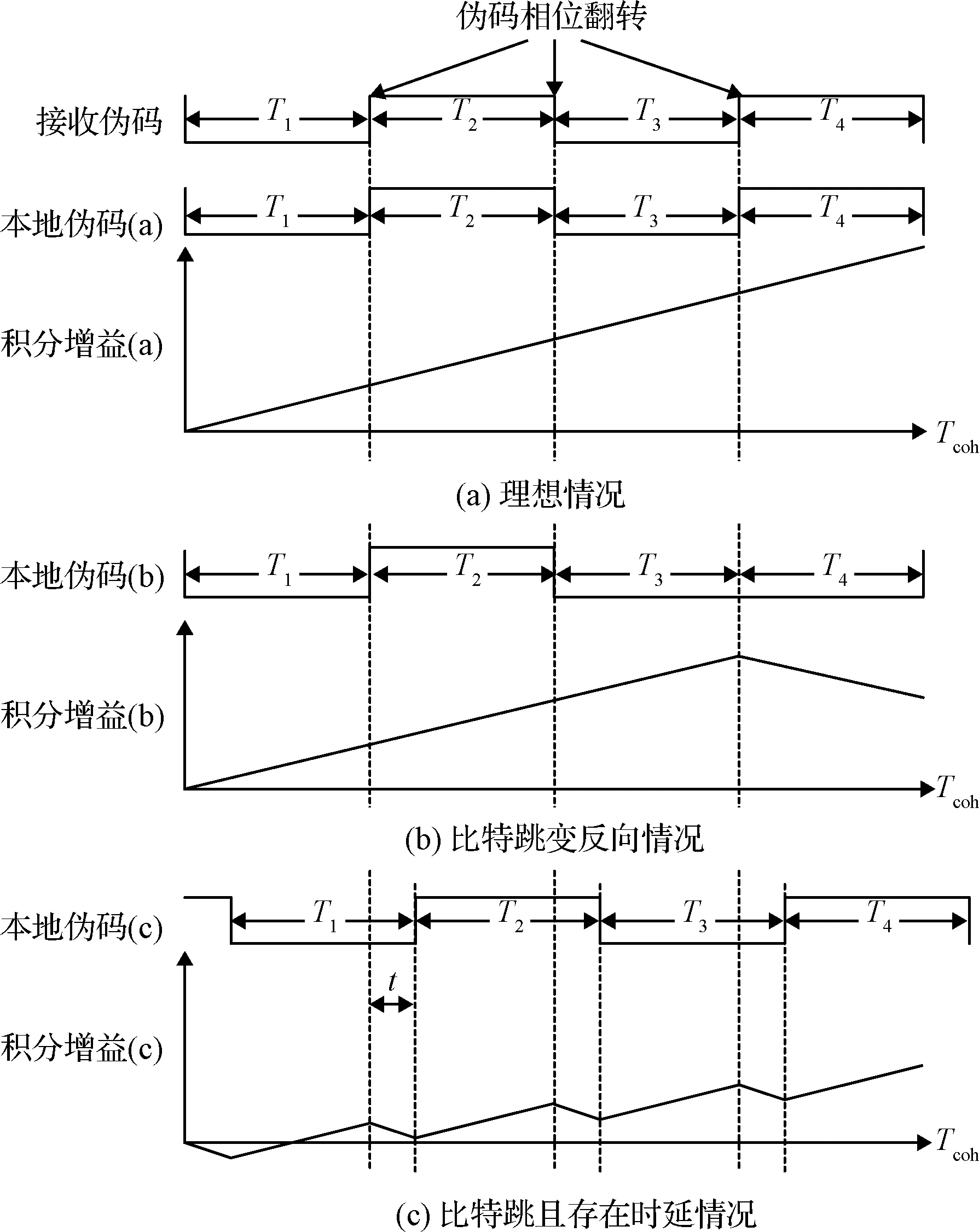
图1 相干积分受伪码时延影响情况Fig.1 Time delay effects of PN code on the coherent integration
当本地伪码与接收信号伪码保持完全同步的情况下,相干积分增益呈线性增加趋势,相干积分时间越长,积分增益越大。而当本地伪码与接收信号伪码无法保持完全同步的情况下,由于存在积分结果符号位取反问题,会造成积分增益恶化。最极端的情况下,如本地伪码与收到信号伪码存在50%以上反相,相干积分完全无法生效。
因此,本地电文正确性是决定跨比特电文相干积分是否生效的直接因素。
此外,即便电文翻转同步情况下,当本地电文与接收信号电文存在延迟时,相干积分增益也会存在较为明显的波动。当初始延时较大时,滑动本地伪码所产生的时延可计算为:
=×Δ
(5)
式中:为单次相干积分时长;Δ为伪码滑动速率,通常取小于0.5码片。初始伪码延迟越大,捕获次数越多。假设弱信号捕获增益需要4个电文长度(80 ms)相干积分时长,则1 μs的延时所带来的捕获次数将达到2048次,产生捕获时长约2.7分钟。在导航卫星未知的情况下,60颗导航卫星串行捕获最坏情况需要2.7小时,接收机将无法定位。
综上,想要在低信噪比下实现接收机正常工作,必须设法实现获取以下3方面先验辅助信息:
(1)在有电文情况下获取电文数据内容(可通过其他信息传输手段获得);
(2)电文跳变沿高精度时标信息(可通过其他授时手段获得);
(3)当前位置可视的导航星号(可通过其他信息传输手段获得)。
2 低轨卫星辅助高灵敏度定位系统
2.1 空间载荷设计
结合前文所述,低轨卫星辅助高灵敏度定位系统空间段主要实现以下功能:
(1)播发高精度信标信号,通过单星过境过程中多次多普勒测距原理,实现终端初始位置获取及时标生成,确保可生成与导航星座低相位误差的本地伪码;
(2)根据低轨长期导航卫星监视结果实现地面终端可视卫星预报,解决终端盲搜情况下长时间相干积分带来的时间消耗问题。
系统空间段设计如图2所示,运行于低轨卫星上的导航接收机通过低轨卫星全球化运动,实现GNSS全星座卫星星历数据快速搜集,并将高时效性星历数据及低轨卫星自身定位/定轨数据传输至下行播发电文生成系统,同时产生与GNSS卫星一致的UTC秒脉冲信号,传输至卫星时统系统;下行播发电文生成系统基于轨道动力学模型完成低轨卫星高精度轨道拟合预报及下行信号覆盖区域可见卫星参数预报,用于地面终端定位解算及快速针对性导航卫星辅助捕获;卫星时统分系统生成长时间、与导航星座相位同步的本地参考时钟信号;辅助导航服务信号发射机生成初始相位对准的信号电文(含低轨卫星自身星历信息、可见卫星预报信息)、扩频伪码序列,并完成载波调制后,通过下行天线对地播发。

图2 低轨卫星辅助高灵敏度定位系统空间段设计Fig.2 Space segment design of LEO satellite auxiliary high sensitivity positioning system
整个空间段设计实现了地面快速、高灵敏度捕获所需的关键核心参数的辅助播发功能,具有如下优势特征:
(1)利用低轨卫星轨道高度低的特点,实现强落地信号功率电平;
(2)利用确定的信号频点、扩频序列及过境期间快速多普勒变化特征,实现快速粗定位信标播发及时标传递;
(3)通过电文预报生成功能,实现可见GNSS卫星选星预报参数传递。
2.2 终端设计
终端部分实现原理如图3所示,其核心功能可分为两个部分:
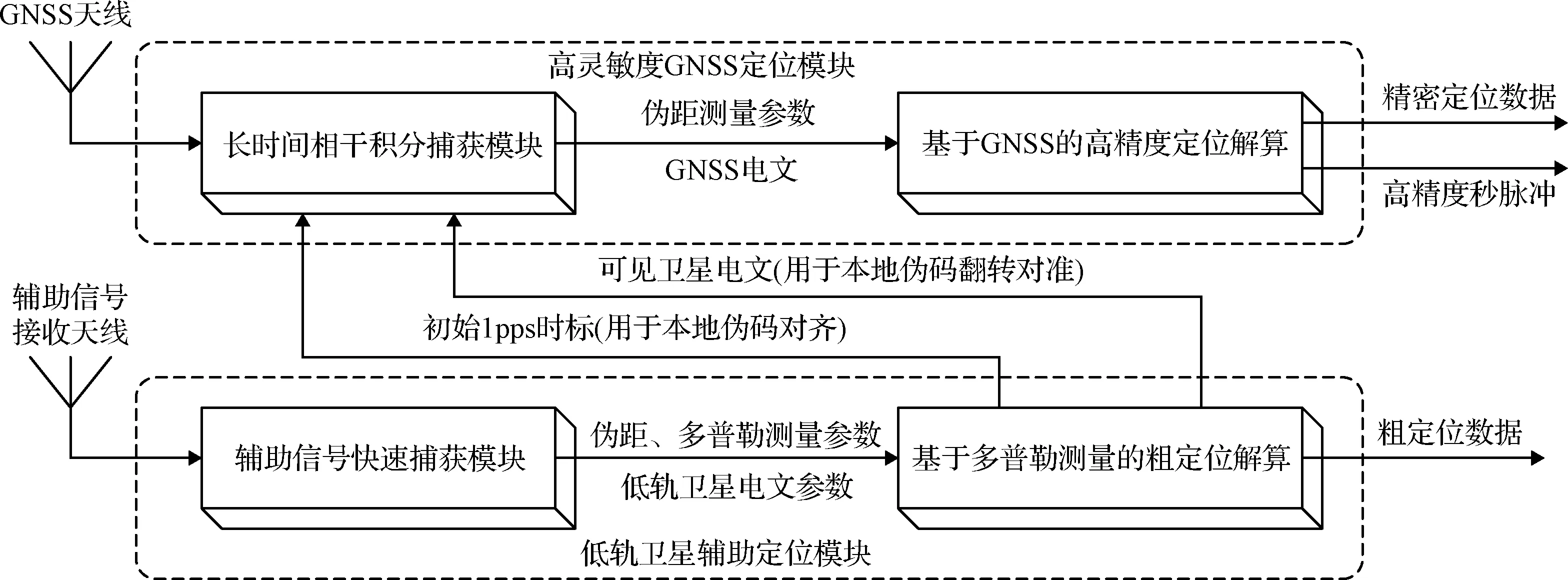
图3 低轨卫星辅助高灵敏度定位系统终端设计Fig.3 Terminal design of LEO satellite auxiliary high sensitivity positioning system
(1)低轨卫星辅助定位模块:用于接收捕获低轨卫星辅助信号,通过多次伪距及载波多普勒测量,实现终端粗定位,获取与GNSS粗同步的秒脉冲(1pps)信号及当前时段可见的GNSS卫星星历,并传输至高灵敏度定位模块;
(2)高灵敏度定位模块:接收辅助定位模块的1pps和可见卫星星历,跳过信号盲捕过程,直接生成可见的本地高同步伪码进行GNSS卫星信号捕获,通过长时间相干积分实现高灵敏度信号接收并完成基于GNSS的高精度定位解算,对外提供位置服务。
在引入低轨卫星辅助定位功能后,很方便地实现了本地伪码与可见卫星伪码的高精度同步,规避了长时间相干积分枚举式盲捕带来的时间及资源消耗,在实现高灵敏度的同时提升了捕获效率。
3 低相噪信号生成设计
为保证下行信号可为终端提供高精度定位及授时服务,以便终端能够通过信标信号获取足够精确的本地伪码相位及期望捕获的GNSS卫星,空间段需提供低相噪扩频调制信号,现对相关核心技术设计原理及精度影响进行分析。
3.1 技术机理
扩频正交相移键控调制信号的相位噪声直接决定了信号伪码测量及同步的精度,无相位噪声的理想发射射频信号可以表示如下:
()=()()cos+
()()sin+()
(6)
式中:为信号幅度,在不考虑功率平衡度影响的情况下,令I、Q两支路功率平衡且不出现非线性失真;(),()分别为正交基带电文;(),()分别为正交扩频伪码;sin(),cos()分别为正交载波;()为加性高斯白噪声。
当发射机时钟树设计存在多次分频、倍频等频率综合处理时,时钟抖动是导致相位噪声恶化的直接因素。传统的发射机时钟树设计如图4。
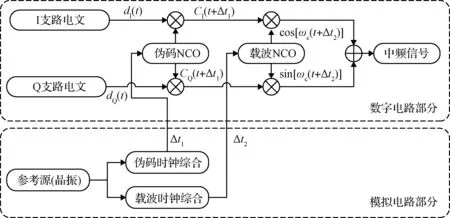
图4 传统发射机时钟树设计Fig.4 Design of clock tree for traditional transmittesr
可以看出,在不考虑数字振荡器(Numerically controlled oscillator,NCO)生成引入微小相位误差的情况下,时钟抖动误差引入最为严重的部分为伪码时钟综合和载波时钟综合两部分,其抖动指标直接影响中频信号生成质量。
3.2 精度影响分析
考虑图4所示的信号发射机系统,其产生的实际信号可表示为:
′()=()(+Δ)cos[(+Δ)]+
()(+Δ)sin[(+Δ)]+()
(7)
式中:′()为一般发射机实际播发信号;(+Δ),(+Δ)分别为考虑了伪码参考时钟抖动Δ后的伪码;cos[(+Δ)],sin[(+Δ)]分别为考虑了载波参考时钟抖动Δ后的本地中频载波。对式(7)进行简化得:
′()=()+()+()
(8)
式中:()为伪码相位抖动;()为载波相位抖动。
进而,伪码相位抖动在接收系统中体现为伪码相位非对准情况,其产生的相干积分增益将出现恶化情况,如图1中第(c)种情况所示。在不考虑离散采样的情况下,发射机伪码相位随机抖动对标准接收端产生的相干积分损耗为近似线性递增关系,且结合式(8)可知,如果伪码存在相位随机抖动1 ns以上时,接收端相干积分增益存在1.6 dB以上损耗,即接收端灵敏度将存在1.6 dB以上恶化。
当仅考虑载波存在相位随机误差时,可将信号EVM与发射信号信噪比关系表示为:

(9)

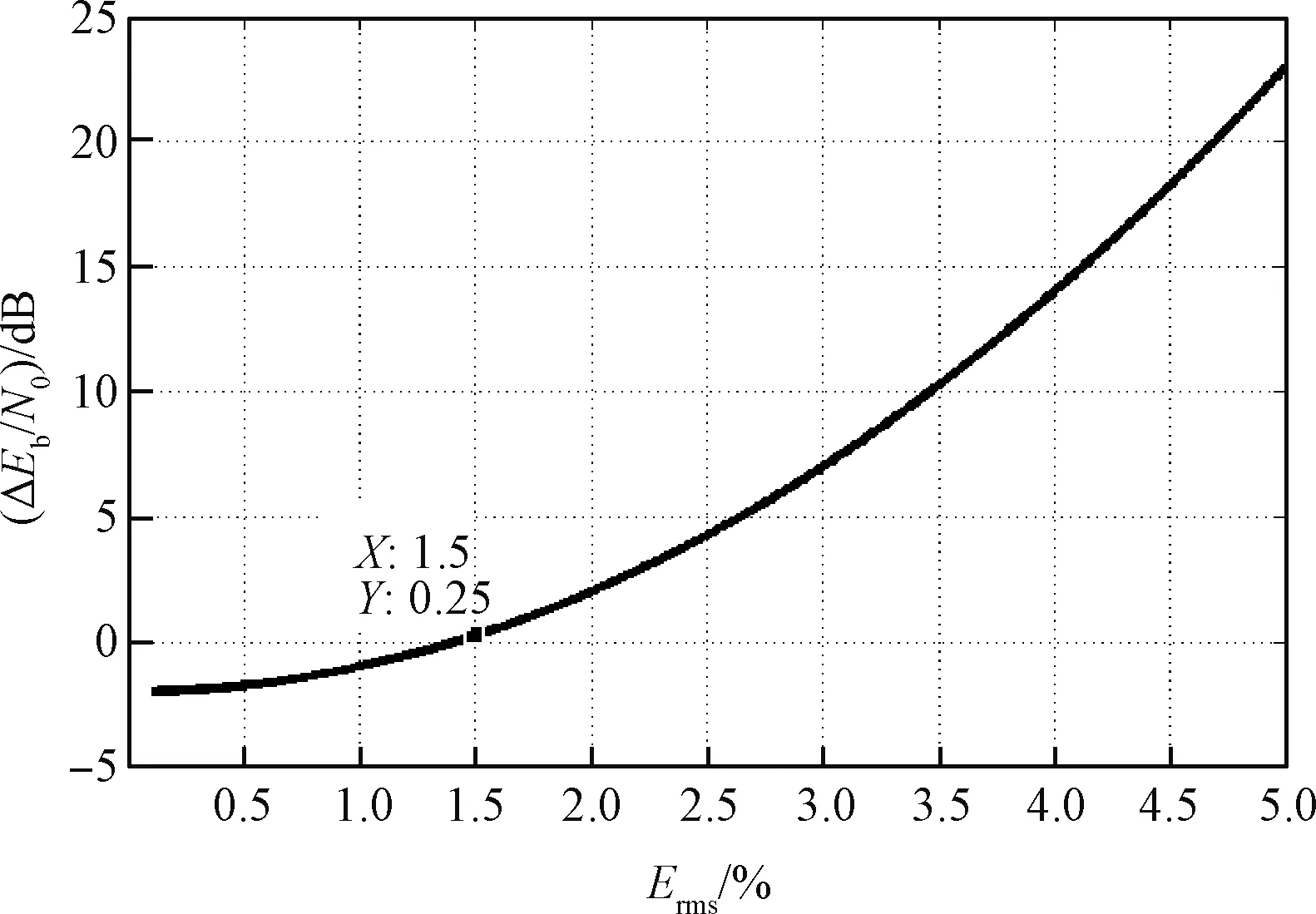
图5 信号误差向量幅度与发射信号信噪比损耗关系Fig.5 Relation between EVM and SNR loss of transmitted signal
当信号=15时,信号信噪比损耗约0.25 dB,此损耗非常小,可忽略不计。
3.3 一种低相噪基带信号生成设计
不失一般性且充分考虑频谱资源限制,发射机配置伪码速率为5.115 Mbps,工作频段为1.2~1.6 GHz。设备内部选择10.23 MHz恒温晶振为参考时钟源,时钟树规划如图6所示。

图6 发射机时钟树设计Fig.6 Clock tree design of transmitters
图中,整个发射部分时钟树基于单一恒温晶振,为保证数字部分FPGA内部DCM输入时钟范围(>25 MHz),恒温晶振参考时钟源需首先进行倍频处理,此处设置为4倍。数字部分生成3种工作时钟,分别为电文处理时钟,载波NCO参考时钟和伪码NCO参考时钟,对应于数字电路部分参考时钟的,,,其约束如下:
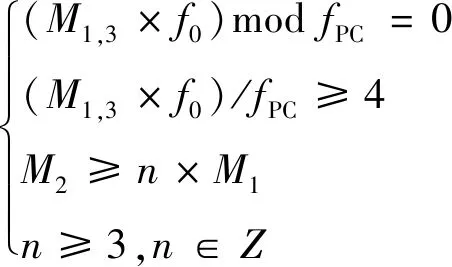
(10)
式中:为伪码速率,本文取5.115 Mbps。从式(10)可以看出,一方面倍频后的各参考时钟均实现了整数倍设计,同时载波环需满足最小3倍采样,码环需满足最小码片宽度2倍的一般要求。在模拟部分,根据发射频点需求,同样选择整数倍频策略,限制倍频系数∈即可。
为进一步改善晶振参考频率数字4倍频过程中出现相位抖动问题,本文设计一种基于模拟倍频分量提取技术的时钟倍频电路设计,具体如图7。

图7 倍频分量提取技术方案Fig.7 Technical scheme of frequency doubling component extraction
借助放大器深度压缩非线性谐波特性,提取晶振4倍频分量并滤波后,实现对参考频率源倍频谐波提取,其相噪特性完全取决于恒温晶振自身特性及放大器相噪特性,相噪引入的频率抖动相比一般数字频率综合器大幅优化。
4 系统效能测试验证
4.1 发射信号EVM测试
结合前文所用晶振倍频分量提取技术,将采用数字频率综合(DFS)与倍频分量提取(FDC),两种方式所产生的信号EVM进行对比,固定发射信号频点为1600.995 MHz,并选用5组,,及参数组合测试,其中3组满足设计约束,3组不满足设计约束,测试结果如表1所示。

表1 不同条件下基带信号EVM测试结果Table 1 EVM test results of baseband signal under different conditions
从测试结果横向对比可以看出,采用FDC方式进行频率源获取,由于不引入数字化抖动误差,其所产生的调制信号EVM明显好于DFS方式约2%左右。结合3.2中分析结果,当>15时,信噪比开始引入损耗,因此,采用DFS方式必然引入发射信号信噪比损耗。
从纵向对比可以看出,组合1和组合2满足3.3节设计约束,其所得的信号指标均维持在1.5%以内,其中,组合2将,,翻倍时,EVM指标进一步优化,但由于FPGA器件工作频率限制,不能通过无限扩大倍数的方式更大程度实现优化效果;组合3为伪码NCO非整数倍设计的情况,可以看出其对调制信号影响最为严重(约2%);而组合4为射频混频非整数倍优化,但由于其倍频系数较大且为模拟频率合成方式实现,故其对EVM恶化程度相对较小(约0.5%~0.6%);组合5为载波NCO非整数倍情况,其恶化程度在0.8%左右。
值得一提的是,上述组合实验均为长期观测结果,可代表不同参数配置下的平均水平。
4.2 在轨辅助导航定位性能测试
本文所设计的低轨卫星高灵敏度辅助定位服务系统搭载于某低轨卫星于2019年11月发射,在轨过程中分别对北京、天津两热点区域进行辅助定位功能测试,搭建环境如图8所示。

图8 性能测试系统Fig.8 Performance test system
通过对GNSS终端灌入高功率白噪声信号的方式以降低接收GNSS信号信噪比,进而实现极弱信号环境模拟,实测接收机定位曲线如图9所示。

图9 单星过境过程定位曲线Fig.9 Positioning curve of single satellite transit process
可以看出,终端仅通过单星过境多次多普勒测量结果进行定位过程共分为3段时间,分别如下:
(1)卫星入境前(信号未捕获),为非定位状态;
(2)卫星入境后但未过顶前(信号捕获),可定位,但由于测量值空间分布较差,定位精度约3.3~3.6 km,对应授时精度约11~12 μs;
(3)卫星入境后且过顶后(信号捕获),可定位,由于累计测量值空间分布提升,定位精度约1.1~1.3 km,对应授时精度约3~4 μs。
因此,通过低轨卫星辅助后,终端可以在未正常接收导航星(干扰/遮挡)的情况下,实现1.1~1.3 km 粗定位及3~4 μs时间获取。
进一步,通过粗定位结果进行长相干积分的方式对被噪声干扰的GNSS信号进行高灵敏度捕获,结果如图10所示。在低轨卫星过境前,终端处于非定位状态,在第61 s首次捕获低轨卫星信号,当单星定位达到1.609 km后,载荷基于辅助时标及星历参数新捕获北斗卫星,在达到224 s时成功捕获5颗北斗卫星并完成基于北斗的定位解算,最终定位精度为5 m,引导GNSS捕获时长约163 s,与1.2节中所分析的单星捕获时长相近。可见,经过低轨卫星辅助后,终端有效实现了针对性卫星捕获,相比逐个捕获而言,仅用了单星理论捕获时长即完成了弱信号状态下的高灵敏度捕获,引导功能生效。

图10 低轨卫星辅助定位过程曲线Fig.10 Process curve of LEO satellite auxiliary positioning
进一步分析终端抗干扰能力,在未加入干扰情况下,终端载噪比为34 dB,加入噪声后,终端载噪比突变为21 dB,证明通过辅助定位功能,终端灵敏度相对正常状态提升13 dB。
为不失一般性,对载荷多次过境性能进行分析汇总如表2所示:

表2 载荷多次过境性能分析结果Table 2 Analysis results of multi-load performance
从表2可以看出,辅助定位精度越高,引导GNSS捕获时长越小,即授时精度越高、引导捕获越快,该结果验证了1.2节中的理论分析。而从最终定位精度和灵敏度提升性能而言,上午时段相比晚上时段性能偏好,这是由于北斗系统在北京地区上午可见星数相比晚上时段偏多,造成可捕获卫星数量偏多,进而使得卫星几何精度因子分布较好的缘故。考虑最差情况,该系统可实现的灵敏度提升水平为12 dB,引导捕获时间优于3.5分钟。
4.3 在轨播发信号质量评估
经对过境过程中实采信号分析,辅助导航信标信号在经历了空间信道影响、接收系统射频放大链路影响及动态多普勒影响的情况下,信号仍可达到3.2%,眼图开度(Open Factor)0.904,眼图信噪比10.5 dB,可有效提供终端正常捕获及解算。
5 结 论
本文针对导航接收机高灵敏度定位关键技术,设计了一种基于低轨卫星信标引导的辅助定位方案,通过低轨信标播发的方式实现了先验信息预报,进而提升了导航接收机长时间相干积分的精度和效率。同时,针对低轨卫星空间段载荷,重点分析了内部时钟系统设计对最终信号播发质量的影响,并给出了基于倍频分量提取技术的低相噪时钟源生成方法。经对比测试,该方法可实现最终发射信号EVM优于1.5%,保证了信号载噪比无损失。
通过在轨系统测试及性能分析,所设计系统可应用于干扰工况、遮挡等特殊环境下的高灵敏度定位(>12 dB提升),为未来导航增强、导航抗干扰、高轨GNSS漏信号导航等相关领域系统设计提供了新的解决方案。
猜你喜欢
工业设计(2022年9期)2022-10-13
数学大王·低年级(2018年9期)2018-10-24
阅读(中年级)(2018年11期)2018-01-19
中学数学杂志(初中版)(2017年4期)2017-08-28
数学大王·中高年级(2017年2期)2017-02-08
学苑创造·A版(2016年4期)2016-04-16
