
基于六轴惯导的电网带电运维机器人作业位置预判
2022-05-24 11:44王贤强刘军张正祥胡云辉
电子设计工程 2022年10期
王贤强,刘军,张正祥,胡云辉
(国网安徽省电力公司合肥供电公司,安徽 合肥 230000)
目前,民用电量和工业用电量急剧增多,给电力系统带来了较大的压力,同时也为电力系统提供了新的发展机遇[1]。电力系统的安全运行是保证电网稳定的重要前提,早期对电网系统的检查主要依赖于人工,工作人员使用特定的环境监控设备定期对电网进行巡检,以此保障电网的安全运行。随着用电量的成倍增加,电网供电范围的扩大,早期的人工巡检方法工作效率低、危险性高,易出现错检、漏检的情况,巡检工作逐渐被机器人取代[2-4]。针对电网特殊的工作环境,机器人代替人工巡检的方法更加安全可靠,且实时性强,是未来电网带电运维无人化的趋势和研究热点[5]。
国外对带电作业机器人的研究比较早,运维机器人作为移动机器人的一种,其研究在80 年代末已经取得了一定的成果,进入21 世纪后,国外的一些学者已经开发出运维机器人的样机,且对机器人的行为导航技术也有一定的研究成果[6]。传统的机器人作业位置预判方法只能单自由度地控制机器人机械臂识别周围环境,部分角度的环境信息缺失,使预判位置存在一定的位置误差和航向角度误差[7]。针对这一问题,该文提出了基于六轴惯导的电网带电运维机器人作业位置预判方法,解决了传统方法中存在的问题。
1 机器人作业位置预判方法设计
1.1 运维环境温度误差
利用六轴惯导控制机器臂末端的手持惯导设备轨迹,获取以机器人为中心的周围环境特征,为机器人作业位置的预判做准备。使用六轴惯导为带电作业机器人的控制核心,其设计的控制模块主要包括手持惯导设备、机器人空间机械臂和机械臂控制器,其中手持惯导设备采集操作员手部动作,将手部动作数据通过无线网络传输到机械臂控制器。六轴惯导控制结构如图1 所示。

图1 六轴惯导控制结构
在实际的电网带电运维过程中,机器人通过云台被推送到作业高空,工作人员操作机器臂和环境感知部件感知周围环境,传输环境数据,完成作业任务[8]。在云台上,双目立体相机实时将环境感知部件采集的图像数据通过无线网络传输到地面。机器臂操作控制器通过操作员手部操作,自动规划各自由度的运行轨迹,驱动机械臂运动,从而使机器臂调整到操作员期望的空间角度,获取周围完整的环境信息[9-10]。
在获取图像的同时,使用红外测温功能,识别周围环境温度异常的物体。在电网系统中,很多设备零件内部存在热运动,符合黑体辐射定律[11]。根据黑体辐射定律:

式中,α1和α2表示辐射常数,β表示光谱辐射波长,T表示绝对温度,P表示能量密度。
结合上述公式可知红外测温的原理,辐射能力越强的物体代表其温度也越高[12-13]。带电运维机器人上装有红外热像仪,利用红外热像仪上的探测器聚焦设备零件的局部区域热度,从而将温度数据传输至显示界面,获得已知的温度数据。
根据已知的温度数据进行诊断时,针对不同的情况,考虑温升、温差和相对温差3 个关键因素[14]。相对误差是根据相应的两个测点之间的温差与其中较热点的温升之比的百分数获得[14]。公式如下:

式中,κ1表示发热点的温升,κ2为正常相对应点的温升,g0表示环境参照体的温度,g1和g2分别表示发热点和正常相对应点的温度。根据电网线路的温度诊断,明确机器人运维环境,避免由温度引起的运维误差。
1.2 运维环境特征模型构建
通过上述过程获得周围环境特征,从而对机器人作业位置进行预判[15]。通过环境感知部件获得一定的距离数据,距离数据所呈现的特征就是观测到的环境特征。在环境感知部件工作时,受到外界因素的影响,距离数据中存在部分噪声,不能直接获取到完美直线。针对这一问题,引用约束规则,将属于同一直线的距离点归并,获得完美的环境特征直线。用极坐标r=(θ,λ) 表示距离点,直线由模型参数(d,γ)描述,d表示机器人到直线的距离,γ表示d到机器人坐标横轴的夹角。该直线特征作为机器人位置估计的观测,观测模型可以用下式表示:

式中,Ma表示在机器人极坐标下a时刻的观测模型,通过观测模型可获得环境地图中的特征。
1.3 机器人作业位置预判
假设带电运维机器人从已知的位置出发,通过机器人上的运动感受传感器达到获取机器人行动信息的目的,将收集到的多种行动信息集成为控制输入数据,通过这些输入数据达到跟踪机器人位置的目的[16]。需要注意的是,传感器测量的数据并不能完美地代替机器人实际执行的动作,在测量过程中存在部分误差,被引入到后续操作中,给机器人作业位置预判带来了误差。因此,建立机器人的位置预测模型,以预测机器人的作业位置。
利用IMU(惯性测量单元)获取机器人的绝对航向信息,利用里程计和IMU 实现机器人在起始点的初始位置对准:

式中,W0表示机器人的初始位置。根据机器人的运动学模型,得到机器人位置更新的基本方程:
式中,v表示机器人的线速度,W表示前一时刻位置的估计数据,ω表示机器人移动的旋转角速度,W'表示后一时刻位置的估计数据。通过初始位置和更新位置获得预测直线。在对电网带电运维机器人作业位置预判时,将通过观测模型获得的观测直线及通过IMU 得到的预测直线相匹配,将预测直线数据组成预测子集,观测子集则由环境感知数据组成。为了保证匹配过程中预测和观测的数据一一对应,避免出现一对多或多对一的异常情况,将观测直线和预测直线都关联同一个环境特征。同时建立一个预测和观测之间的修正量ξij,更好地找到观测之间预测的配对。

式中,(v·t)ja表示a时刻的观测,(v·t)'ia表示a时刻的预测。为了判断特征预测和观测之间匹配是否有效,给出匹配的判定门限:

其中,G表示预测和观测之间匹配的门限阈值。在预测子集和观测子集匹配过程中,通过式(9)的判定条件判断一个观测与各个预测之间的关系。在真实的作业过程中,只有一个观测结果落在一个判定门限才是有效的。若出现一个观测对应多个判定门限,则通过计算和多次匹配,筛选出最佳的配对作为有效配对。对于匹配过程中没有落入判定门限的观测,则直接弃置,仅利用预测来估计机器人的作业位置。
在电网带电运维过程中,其机器人作业环境基本相似,环境特征相似度较高,为了避免落入多个判定门限的情况,选择环境特征差异较大的区域。
至此,基于六轴惯导的电网带电运维机器人作业预判方法设计完成。
2 实验结果与分析
在电网带电运维机器人作业位置预判实验研究中,主要引用传统的预判方法进行对比实验,实验所用的机器人如图2 所示。

图2 实验机器人
为减少自然环境的干扰,定位实验在室内进行,分别使用基于六轴惯导的电网带电运维机器人作业位置预判方法和文献[7]提出的巡线机器人输电线路状态检修方法进行对比实验,使用第三方软件Rviz输出结果,通过仿真结果能够明显看出不同预判方法的对比效果。
图3显示的a、b、c、d 4个点为预判点,图中的轨迹为机器人行动轨迹。从图中可以看出,传统预判方法预判的位置与机器人实际行动轨迹相比,出现了严重的偏离,而该文方法预判的位置与机器人实际行动轨迹十分贴切。统计出两组实验结果的位置误差和航向角误差,使用不同的预判方法进行多次实验,利用统计软件SPSS 统计位置误差和航向角误差。具体统计结果如表1 所示。
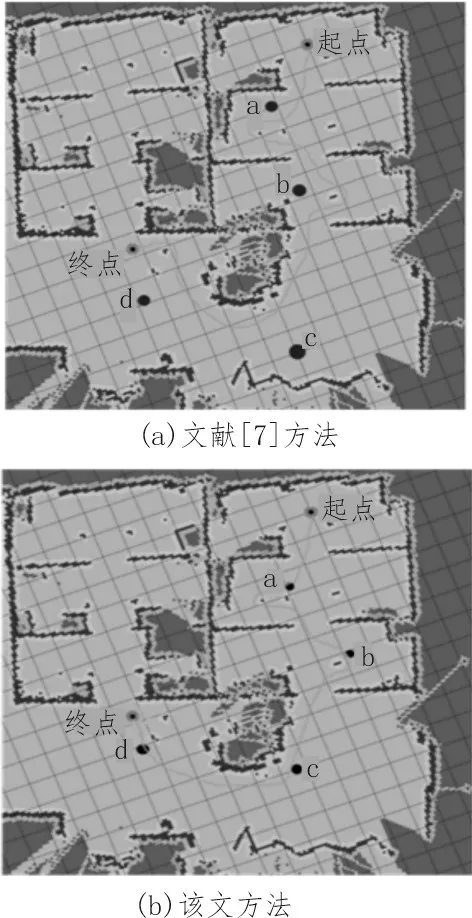
图3 不同预判方法位置预判实验结果
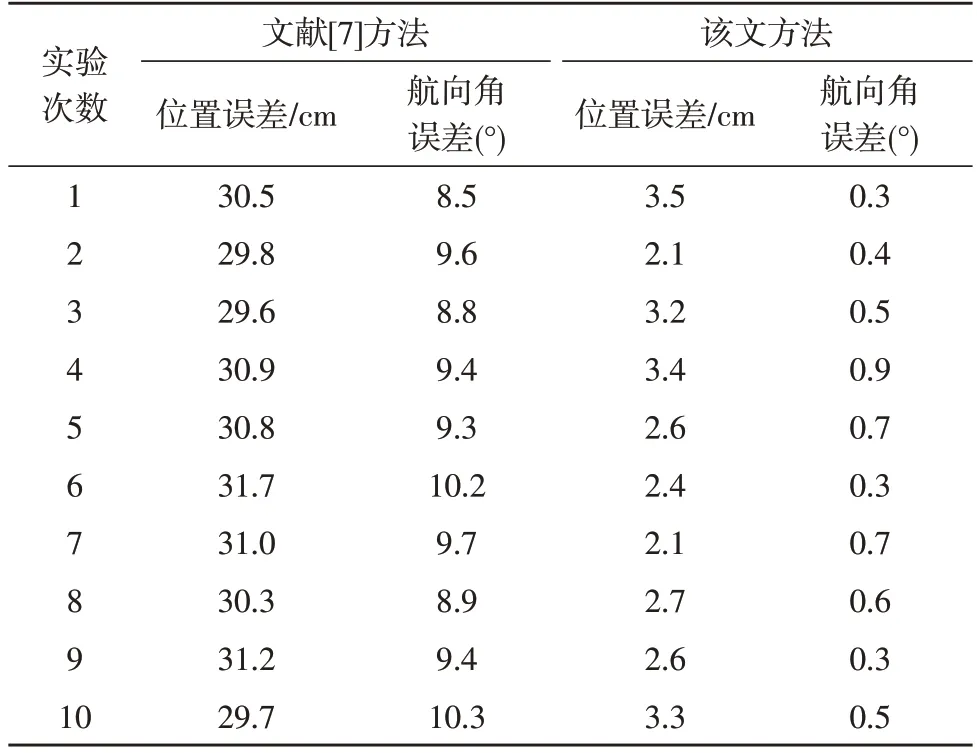
表1 不同预判方法误差统计结果
由表1 可知,文献[7]提出的巡线机器人输电线路状态检修方法平均位置误差为30.55 cm,航向角误差为9.41°;基于六轴惯导的预判方法平均位置误差为2.79 cm,航向角误差为0.52°。对比以上数据,可以明显看出传统的预判方法位置误差远高于基于六轴惯导的电网带电运维机器人作业位置预判方法,说明设计的预判方法优于传统预判方法。
3 结束语
机器人在电网带电运维中承担着电力巡检的任务,通过对作业位置的预判,完成预定的作业任务并实时上报。通过引用六轴惯导控制机器人的行为,利用机器臂获取机器人周围环境信息,依据环境信息及物件温度变化预判出机器人作业位置。针对不同预判方法,设计对比实验,在相同的实验条件下,证明了设计的基于六轴惯导的电网带电运维机器人作业位置预判方法更加优秀。但是所提方法仍然存在一些问题,由于实验过程数据主要依靠人工测量,定位精度不足,下一步研究工作可以围绕这一问题展开。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中国交通信息化(2022年3期)2022-06-01
汽车工程师(2021年12期)2022-01-18
进出口经理人(2021年8期)2021-02-12
出版人(2020年5期)2020-11-17
中国交通信息化(2019年5期)2019-08-30
今日农业(2019年14期)2019-01-04
北京航空航天大学学报(2018年1期)2018-04-20
山东工业技术(2016年15期)2016-12-01
电子制作(2016年21期)2016-05-17
