
基于物联网的隧道管片接头转角感知装置研究
2022-05-24 11:43朱雨晨
电子设计工程 2022年10期
朱雨晨,李 忠,2
(1.上海工程技术大学城市轨道交通学院,上海 201620;2.兰州理工大学土木工程学院,甘肃 兰州 730050)
针对地下隧道在长期运营过程中会受到地质条件变化、围岩结构损伤劣化而导致的各种病害问题,隧道结构安全状态的实时监测技术得到了广泛应用。虽然在隧道变形监测方面取得了较大的进展,但是也存在相应的缺陷或者不足,如传感器重复利用率低、开发周期长、监测仪器(如全站仪、三维激光扫描仪等)费用昂贵且不能达到实时性要求。盾构隧道结构在服役寿命内,需要根据结构运营状态、环境相关参数,如位移、应变、湿度和温度等进行长周期性的监测、检查、维护及维修,以提供可用于相关耐久性的建议及判断结果[1]。结合管片衬砌结构一般采用错缝拼装的方式,由于管片接头缺乏来自相邻管片的约束,比较容易张开,不利于长期防水[2],因此,需要对管片接头处进行实时健康状态的监测。文中采用接触式测量的方法,以高精度、低成本、可维护、实时性为目标,进行盾构隧道管片接头处转角感知装置的设计和研究。结合物联网平台技术,以更加方便、直观、可靠的传输方式进行实时远程监测,内容综合了工程数学、物联网、电子通信等诸多学科,形成优势功能互补,旨在更加广泛且可靠地运用在隧道工程领域的监测之中。
物联网技术是网络信息产业化发展的革命性创新成果[3],目前在各个领域都有快速的发展和广泛的应用。在隧道变形监测领域中,物联网也具备广阔的应用前景,同时针对物联网技术在隧道监测中的应用研究[4]也越来越多。何斌等[5]研究无线倾角传感器所采用的温度补偿和数字滤波算法,设计了一种无线倾角传感器来检测地下隧道的结构变形,实验结果符合隧道变形检测的功能需求。王亚琼等[6]分析物联网技术与隧道施工之间的契合度关系,提出基于物联网的隧道施工监控量测技术,并成功应用于大宝山隧道工程。彭毅弘等[7]设计了一套采用新型传感器和ZigBee 无线网络的监测系统,并验证了系统运行的可靠性。黄富禹等[8]阐述了物联网技术的架构体系及在隧道智能安全监测系统中的应用,设计了基于物联网技术的隧道自动化变形监测系统。借鉴以上研究,文中提出一种管片接头转角处位移感知装置设计方案,根据电位器可变电阻的性质介绍了装置实现测量的原理和过程,结合物联网平台实现了对盾构隧道管片转角处的实时监测,并验证了该监测方法的可行性。
1 感知装置设计
1.1 装置原理分析
根据管片拼接结构,将感知装置固定在管片上,在考虑张开角未发生错台阶段的小范围角度变化情况下,对两块相邻的管片在空间结构中接头处的节点[9]可能会发生的上凸、下凹的变化情况进行模拟,结合空间几何位移关系可以通过转角角度得到管片位移变化的情况,其空间几何角度模拟分析图如图1所示,可进一步对隧道结构安全进行判断。
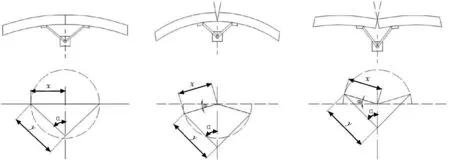
图1 空间几何角度模拟分析图
假设装置连接管片的臂长为x,装置导杆长度为y,位移角α可由感知装置检测得知,在管片发生位移后有倾角θ,可通过已知条件x、y、α推导得到倾角θ:
1.2 装置设计分析
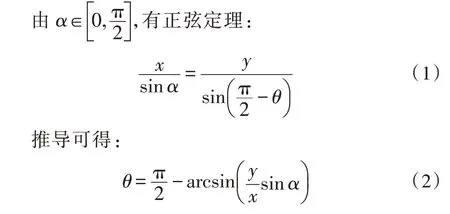
电位式转角感知装置所采用的硬件包括Arduino UNO 开发板、ESP8266 串口Wi-Fi 无线模块、碳膜电位器、9 V 碳性电池、贝壳物联网、固定导杆、转向杆等。整体结构设计示意图如图2 所示。图2 中,1 为主控盒,内置Arduino UNO 开发板、ESP8266-01S 和电源装置,预留电池壳、USB 接口、DC 插头;2 为固定环,由顶部固定销锁住电位器,连接主控盒和固定导杆;3 为固定导杆,由长导杆和连接件组成,主要有固定和支撑的作用;4 为转向杆,一端用于锁紧电位器旋钮,另一端由连接件固定和支撑;5 为连接件,用于装置与拼接块的固定和整体的支撑。
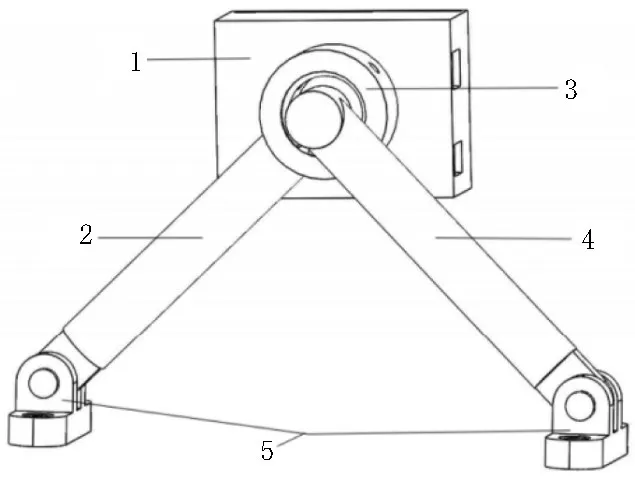
图2 整体结构设计示意图
此装置一侧由固定导杆连接固定环,另一侧的转向杆采用固定销锁紧电位器旋钮固定在装置外壳上,使其轴心与旋钮中心保持同心轴关系,转向杆和旋钮始终保持同步转动,最后将两根导杆的连接件固定在管片上,由此完成装置的整体结构设计。其设计优势体现在主控盒可以有效保护装置内部电路元件,并且具有防灰防尘的作用,能适应地下隧道的恶劣环境。
1.3 安装原理分析
实验模型为某地铁隧道管片结构,每环管片采用管片分块的形式,其中封顶管片的圆心角为22.5°,3 块标准管片的圆心角均为67.5°,封顶管片两端邻接管片的圆心角均为67.5°。实验模型采用1∶10 的几何相似比进行制作,其接头转角测试空间模型示意图如图3 所示,在两块相邻的管片接头处安装感知装置。其监测位置不局限于环向管片之间的测量,也可以对管片纵向的位移偏差进行测量,真正意义上实现错缝管片拼装结构的灵活监测。
图3 管片接头转角测试模型示意图
在完成盾构隧道管片的设备安装后,其整体监测装置的模块框架示意图如图4 所示。N个感知装置组成感知装置模块系统,根据管片所处不同位置在其接头处安装设备,对当前定位的点进行实时监测,通过无线网模块完成数据的采集和传输[10],以上部分均由电池提供电源,最后由物联网平台进行数据的整理和分析,生成曲线图并且设定预警范围,最终完成实时监测的感知装置的模块设计。
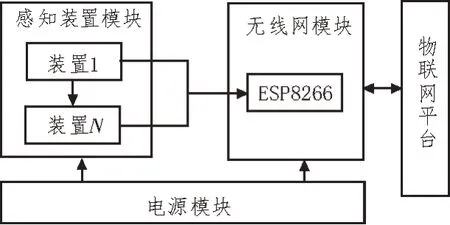
图4 模块框架示意图
2 硬件设计
2.1 电位器
电位器具有3 个引出端、两个固定端和一个滑动触点,其阻值可按照某种线性变化规律调节,若改变滑动触点在电阻体上的位置,则改变了滑动触点与任一个固定端之间的电阻值,从而改变了电压与电流的大小。电位器常用于收音机上调节音量的大小,其实质上是对可变电阻器的调节,家用电器和仪器仪表常用碳膜电位器,电位器的主要使用要求是寿命长、故障率低。故选择单圈碳膜电位器(单联),其标准阻值为10 kΩ,阻值公允误差为±10%,机械转角为300°(连续),工作温度范围为-20~85 ℃,旋转寿命为15 000 转。电位器是一种可以把线位移和角位移转换成一定函数关系的电阻或电压输出的传感元件[11],图5 所示为单圈碳膜电位器原理示意图。假定全长为amax的电位器总电阻为Rmax,电阻沿长度的分布是均匀的,电阻与角度、电压与角度的关系分别为:

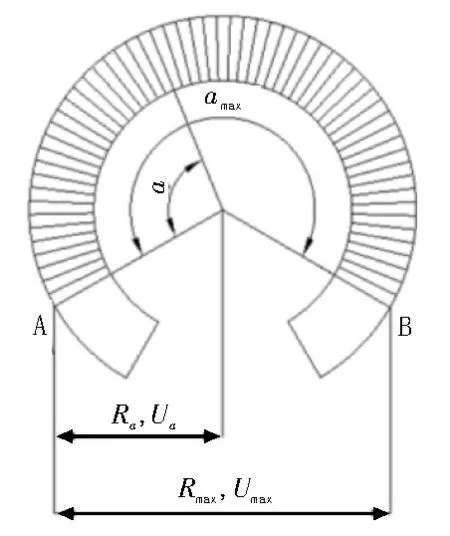
图5 电位器原理示意图
2.2 Arduino UNO
Arduino UNO实质是基于ATmega328P的Arduino开发板,其几乎具备了微控制器所需的一切功触,仅需要把它连接到计算机的USB 接口,或者选择ACDC 适配器,或使用电池,就可以驱动这块开发板。Arduino UNO 的软件开发环境使用的是Arduino IDE,是具有类似Java、C 语言的Processing/Wiring 开发环境。Arduino UNO 有自己的编程语言,是简化的编写代码流程。Arduino UNO 的程序语法结构包含以下两个函数:Set up()与Loop()。Set up()在程序流程中只会执行一次,用于定义所有需要设定、初始化的参数和函数,或者是引脚功能的指定,都会在这部分先定义完成[12]。Loop()是主程序的执行内容,保证电源不中断时,函数内的程序会处于一直执行的状态。
2.3 ESP8266-01S
ESP8266系列Wi-Fi模块一共有01~14多款模块,其中ESP8266-01 简称ESP-01,网上售价在7~8 元左右,在ESP8266系列中具有较高的性价比。ESP-01 需要上拉电阻10 kΩ,而ESP-01S板已经有上拉电阻,其他参数几乎相同,故选择ESP-01S,图6 所示为ESP-01S示意图。ESP-01S模块是由一颗ESP8266作为主控和一颗flash作为存储芯片组成的,带有板载芯片,供电采用3.3 V电压,使用串口进行烧写程序和AT指令集调试。ESP8266集成的Wi-Fi芯片可以工作在3种模式下,分别是AP模式,STA模式和STA+AP模式,支持TCP/IP,其传输速率稳定在10 Mbps[13],满足设计要求。
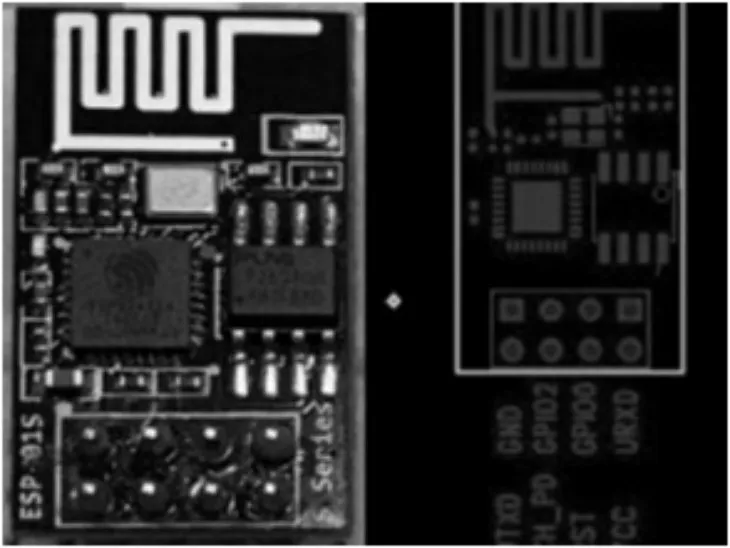
图6 ESP-01S示意图
3 软件设计
3.1 贝壳物联
贝壳物联云平台主要以TCP 协议为主要通信方式,同时辅以UDP 协议,两种协议之间的信息可以互通。进入贝壳物联官网,免费注册一个账号,添加智能设备和设置接口,记录下设备ID、对应的APIKEY和接口ID。当设备通电连接上客户端时,智能设备即处于在线状态。
3.2 程序设计
进入Arduino IDE,点击工具选择开发板型号和端口,注意填写网络环境,即在代码中填写无线网名称和密码,点击上传到开发板,得到调试结果。下一步进行断电重启,拔掉USB 接口再重新接上,在完成重启步骤后,打开IDE的串口监视器,调整波特率为9 600位/s,执行程序AT 指令,直到出现{"L":"WELCOME TO BIGIOT"},则表示设置成功。
根据程序要求填写贝壳物联中添加的设备ID、APIKEY 和接口ID,即完成代码的修改。等待程序上传成功之后,打开串口监视器,调整波特率为115 200 位/s,电位器旋钮的当前数据即上传到贝壳物联预设的接口上。
3.3 监测模式设计
在完成电路搭建和程序设计后,其系统执行的流程图如图7 所示。设备通过USB 接口连接电脑开始提供电源,上传AT 指令完成透传模式,成功连接上贝壳物联网平台。下一步通过电位器的电压转化为模拟量输入到开发板上,再由已连接上Wi-Fi 的ESP-01S 完成数据的传输,在程序中输入物联网平台的设备和数据接口,则完成数据的输出端设计[14]。此时,打开贝壳物联,设备在线,数据同步或以曲线图呈现,若在基准范围内波动,则视为稳定状态;若波动范围超过预警条件,则向客户端发送警告,完成系统流程图循环。
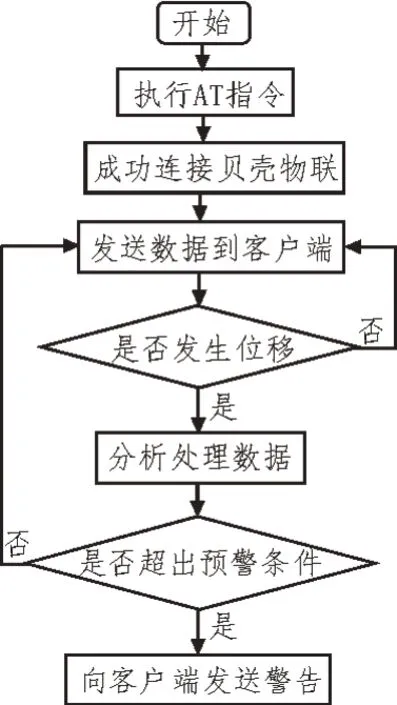
图7 系统流程图
4 系统运行及分析
登录贝壳物联网网站,此时设备已显示在线状态,点击数据查看,转动电位器上的旋钮,效果同初始测试结果相同,其数值变化范围为0~1 023,串口监视器上的数据波动在物联网平台上同步呈现,每间隔5 s 上传一次数据,没有数据延时,则表明该方案具备实时数据同步上传的可行性。
经实验测试调查,电子元件表面粗糙会使电刷触点与电阻元件表面接触不良,因此,在沿碳膜长度方向上接触电阻会发生突变而不连续[15]。即在电位器保持静止的情况下,其数值仍会有小范围波动,由图8可知,数据波动在±2 V 的范围内,满足阻值公允误差的10%以内,即视为正常状态。若数据波动超过误差的10%,则判断该处发生位移,进行预警反馈。
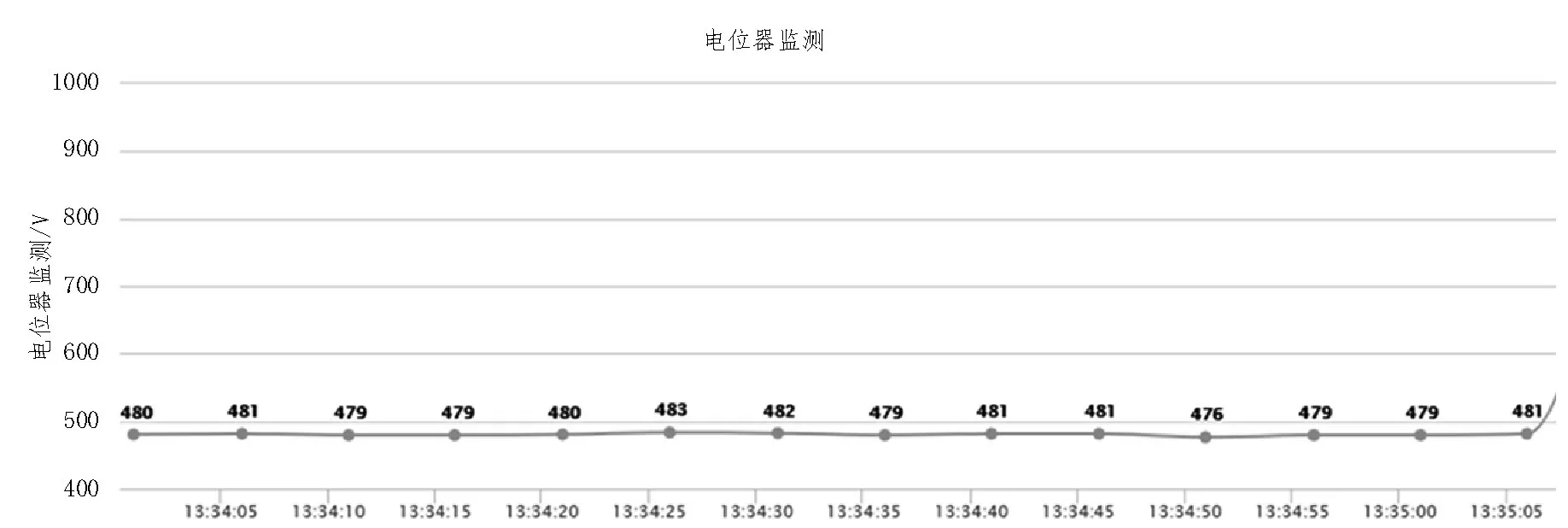
图8 物联网平台数据
此次测试的是盾构隧道管片模型,对管片接头处进行模拟位移实验[16],实验数据采集为2020 年4月14 日13:30~14:30 时间段内PC 客户端生成的数据,同时某一时间段在手机微信端打开贝壳物联小程序,点击在线设备,得到图9 所示手机客户端同一时刻的数据为480 V(2020 年4 月14 日13:34 瞬时变化),在对应的时间,其数据更新与PC 客户端保持一致,符合数据同步更新的条件。
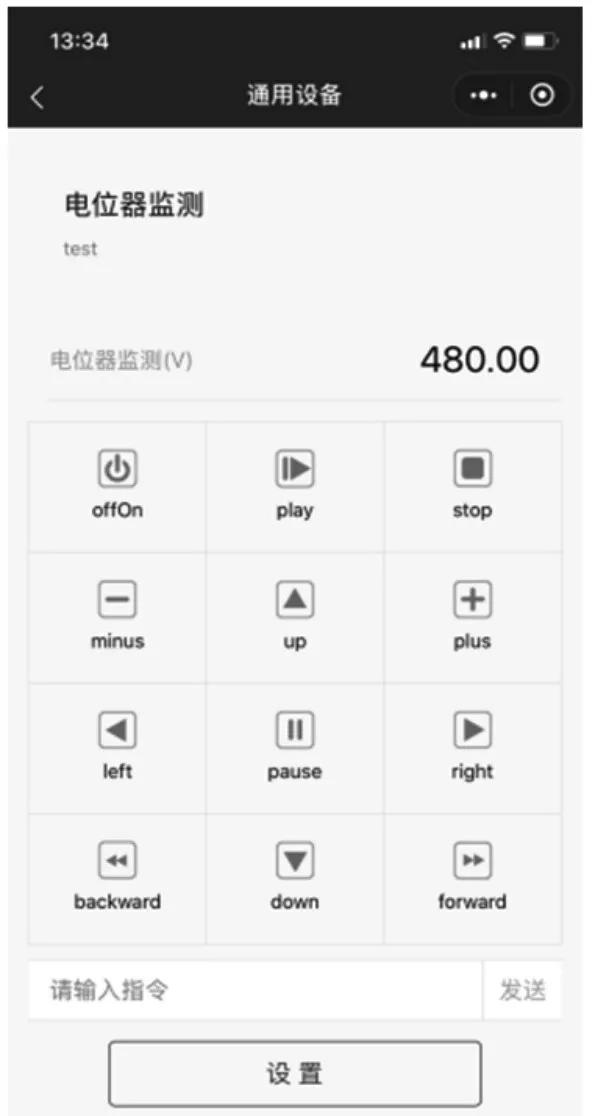
图9 贝壳物联小程序
5 结束语
文中结合物联网技术的发展,对无线远程监测进行拓展,为解决隧道管片接头处转角变化的问题,设计了一套基于物联网的电位式转角感知装置。依据电位器可变电阻的原理,结合空间几何位移关系,通过Arduino 技术分别从硬件和软件对系统进行设计,最后对系统装置进行测试。测试结果表明,系统运行可靠,数据可实时同步显示在贝壳物联及手机客户端上,从而实现物联网平台实时健康状态的监测。
猜你喜欢
水科学与工程技术(2022年3期)2022-07-18
铁道学报(2021年4期)2021-05-13
数学小灵通(1-2年级)(2020年9期)2020-10-27
当代贵州(2019年41期)2019-12-13
World Journal of Hepatology(2019年5期)2019-06-20
中国信息技术教育(2016年23期)2017-01-03
人间(2015年21期)2015-03-11
消费导刊(2014年12期)2015-02-13
哈尔滨理工大学学报(2014年3期)2015-01-04
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
