高速飞行器变质心控制技术综述
2022-05-12 05:19:50周凤岐郭建国
宇航学报 2022年3期
周 敏,周凤岐,周 军,郭建国
(西北工业大学精确制导与控制研究所,西安 710072)
0 引 言
变质心控制是指通过主动改变飞行器质心位置,产生期望控制效应的一种新概念控制手段。飞行器质心位置变化可通过移动机体部分结构或部件来实现。根据可动结构或部件选取方式不同,变质心有以下两种实现方式:
1)可动结构或部件位于飞行器机体外部。例如,设计飞行器外露升力面为可动结构,能够通过平动或转动运动使飞行器系统质心位置发生变化。该方式下飞行器气动外形随之变化,是一种变外形的实现方式。
2)可动结构或部件位于飞行器机体内部。例如,设计飞行器内部配置的电源系统为可动部件,电源移动时飞行器内部质量分布特性变化,系统质心位置发生变化。该方式下飞行器气动外形保持不变,仅内部布局发生变化。
高速飞行器的变质心控制应采用方式2)实现,相比于气动舵、侧喷发动机等传统控制手段具有明显优势,主要体现在以下方面:
1)变质心控制机构完全位于高速飞行器内部,有利于保持飞行器良好气动外形,实现有效减阻,获得更好的升阻特性;
2)实现变质心控制无需配置外露执行机构,避免了热烧蚀、侧向喷流干扰、气动舵面颤振和大动压时铰链力矩过大等问题;
3)利用气动力实现变质心控制时,作动面为整个飞行器机体,控制效率更高,且无燃料消耗,效费比更高。
国外很早就开始了高速飞行器变质心控制技术研究。其中,俄罗斯和美国已实现变质心控制工程应用:俄罗斯的“SS-18”和“SS-27”洲际弹道导弹通过移动战斗部实现质心变化,完成弹头机动控制;美国“三叉戟I”洲际弹道导弹携带的MK-500机动弹头通过移动电子装置实现变质心控制。但是美俄变质心技术研究的详细情况一直处于高度保密状态,可参考的公开文献较少。
国内针对高速飞行器变质心控制的研究起步较晚,但发展迅速。1993年,西北工业大学精确制导与控制研究所的周凤岐教授在国内率先提出并开展了变质心技术研究,其团队针对变质心控制机理、控制模式、控制方法以及执行机构研制等内容开展了系统性的深入研究,发表了国内该领域最早的一批学术论文,并于2004年、2006年分别研制完成了国内首台一维变质心机构原理样机和首台二维变质心机构原理样机,在研制过程中搭建了变质心机构性能测试实验系统。另外,哈尔滨工业大学、北京理工大学等机构的学者也对变质心飞行器动力学、制导控制等进行了研究。
本文围绕高速飞行器变质心控制展开综述,对变质心技术应用于高速飞行器实现不同控制模式的基本原理进行梳理和阐述,分析高速飞行器变质心控制面临的关键问题,并结合未来高速飞行器任务特点和控制需求,提出具有潜力的四个方向的研究建议,为今后变质心技术发展提供思路。
1 变质心控制原理
高速飞行器机体内部可动质量块移动使得系统质心位置在一定范围内变化,过程如图1所示。基于该质心变化效应,根据不同原理可实现三种高速飞行器变质心控制模式,分别是:附加惯量消旋模式、质量矩姿控模式和操稳性能调控模式。

图1 内部质量块运动实现变质心示意图Fig.1 Moving mass control with internal movable masses
1)附加惯量消旋模式
20世纪70年代,Murphy等最早研究了弹丸内部无控活动质量块对运动特性的影响,发现质量块运动会改变弹丸角运动。基于此发现,变质心首先被作为一种实现消旋的简单手段应用在自旋飞行器控制中:John等采用如图2所示的两种内部质量块配置方案主动衰减自旋航天器的圆锥运动,实现航天器消旋;相似装置也被用于自旋火箭以保证飞行稳定。
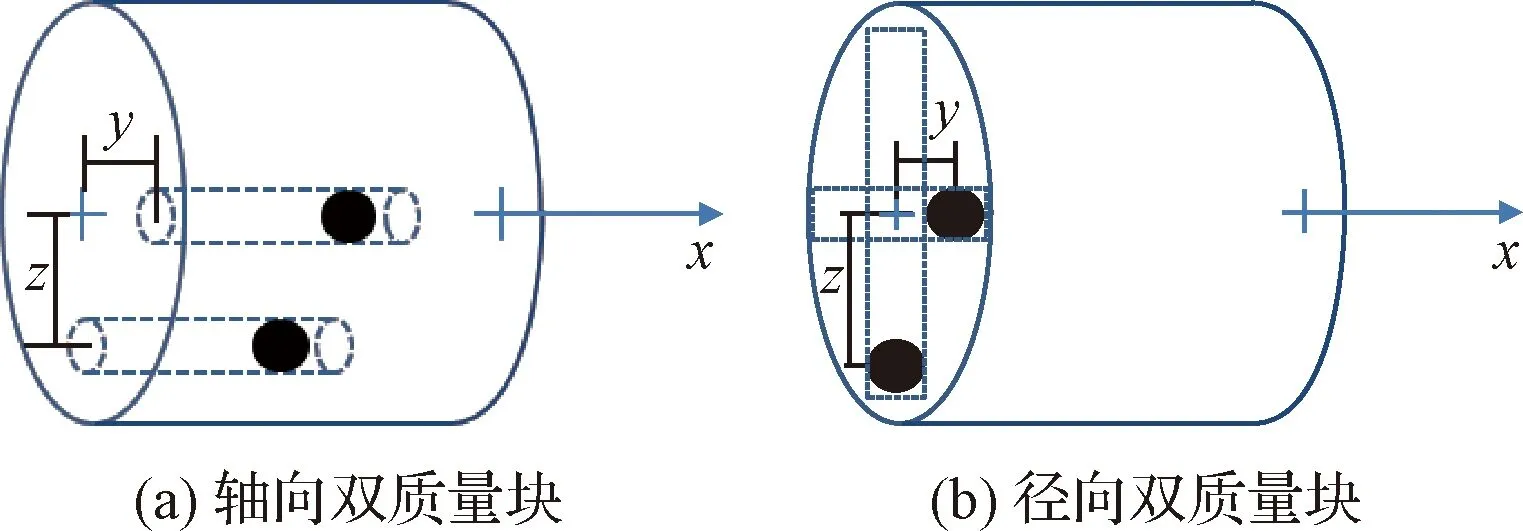
图2 消旋模式的质量块配置Fig.2 Masses configuration of despin control
在国内,周凤岐教授也利用类似方法通过主动控制弹体内部两个活动质量块运动以减小章动角,克服了旋转导弹的螺旋运动,有效提高了旋转导弹的命中精度,这是国内应用变质心技术成功解决实际工程问题的最早范例。
可见,变质心附加惯量消旋模式的控制原理是:通过主动控制机体内部质量块移动改变飞行器惯量特性,使惯性主轴发生偏移,产生期望附加惯量与飞行器角运动耦合,实现飞行器消旋。
2)质量矩姿控模式
2000年,美国陆军空间与导弹防御司令部提出要研究一种用于导弹防御的新概念动能拦截弹——“质量矩拦截器”,结构设想如图3所示,其核心思想是:改变拦截器质心位置,使之偏离气动力作用压心,即可依赖质量形成力矩作用迅速改变拦截器姿态。质量矩拦截器提出的正是变质心技术能够实现的第二种控制模式——质量矩姿控模式。

图3 质量矩拦截器结构设想图Fig.3 Configuration of mass moment interceptor
飞行器姿态控制依赖于需用控制力矩的持续获取,而控制力矩由力臂矢量与力矢量叉乘确定。因此,飞行器姿态控制可通过调节控制力矢量或调节控制力臂矢量两种途径得以实现。传统的气动舵、发动机推力控制均通过调节控制力矢量获取需用控制力矩,变质心控制则通过调节力臂矢量实现。
变质心质量矩姿控模式的控制原理是:利用机体内部质量块移动改变系统质心位置,使气动力、发动机推力等外力的作用力臂变化,从而产生期望控制力矩,实现飞行器姿态控制。
需要特别强调的是,质量矩姿控模式可适用于更多场景,包括:以气动力为外力的大气层内飞行控制;以发动机推力等为外力的大气层外飞行控制。因此,质量矩姿控成为研究最深入、应用对象最丰富的变质心控制模式。
3)操稳性能调控模式
变质心控制应用于大气层内飞行器时,还可以实现另外一种控制模式,即对飞行器操稳性能进行调控。如Rogers和Costello利用如图4所示配置的质量块改变系统质心位置,调整与气动压心之间的相对位置,从而实现飞行器静稳定度主动调控,保证炮弹在不同飞行阶段的操稳性能需求:发射初期质量块向弹体头部方向移动,使炮弹具有较高静稳定度,保证发射初期多种误差干扰条件下的炮弹稳定性;随后,质量块向弹体尾部移动,降低静稳定度,增加机动能力以扩大打击范围。

图4 操稳性能调控模式的质量块配置Fig.4 Masses configuration of stability regulation
操稳性能调控模式下飞行器能够按需改变其操稳性能,提高各飞行阶段的轨迹/姿态控制效能。可见,变质心操稳性能调控模式是在传统轨迹/姿态控制器基础上增加的飞行器特性优化环节,如图5所示,其设计独立于轨迹/姿态控制器设计。

图5 变质心操稳性能调控模式作用方式Fig.5 The effect of moving mass stability regulation
变质心操稳性能调控模式的控制原理是:利用机体内部质量块移动主动调节飞行器质心,改变质心和气动压心的相对位置,调节大气层内飞行器的重压心距,即静稳定度大小,实现大气层内飞行器操稳性能调控。
随着高速飞行器应用领域不断扩大,大空域、宽速域、强机动等大包络飞行需求成为未来高速飞行任务的典型特征。变质心操稳性能调控模式作为一种原理简单却十分有效的飞行器特性优化途径,能够应对大包络飞行下的操稳性能大范围变化需求,在未来高速飞行器发展中发挥重要作用。
2 关键问题
国内外学者针对变质心控制技术在再入飞行器、制导弹药、火星探测器、小型航天器、低空无人机等高速飞行器中的应用开展了大量研究,主要涉及四个方面的关键问题:动力学建模问题、制导控制问题、执行机构设计研制问题以及系统仿真与评估问题。
2.1 变质心多体动力学建模
飞行器动力学建模是开展制导控制系统设计、实现飞行任务的前提和基础。变质心飞行器由内部可动质量块与飞行器本体两部分构成,在忽略飞行器机体挠性变形的前提下属于多刚体范畴,其绕心运动具有强耦合、严重非线性特性,质心平动也受到绕心运动的耦合影响。这与传统单刚体飞行器的质心平动、绕心运动相互独立明显不同,其动力学模型相对复杂,具体表现在:
1)绕心运动受到内部质量块运动产生的惯性力矩影响,其大小由质量块相对于飞行器本体运动的位移、速度、加速度以及转动角度、角速度决定;
2)绕心运动受到内部质量块运动产生的附加转动惯量影响,其大小与质量块质量以及质量块相对于飞行器本体平动位移相关;
3)绕心运动受到内部质量块运动产生的耦合控制力矩影响,其大小由飞行器所受外力、质量块相对于飞行器本体的质量比以及位移决定;
4)质心平动受到内部质量块运动产生的惯性力影响,其大小不仅与质量块相对于飞行器本体运动的位移、速度、加速度相关,还与飞行器自身转动角速度相关,即质心平动和绕心运动耦合。
随着高速飞行任务需求不断提高,特殊构型高速飞行器成为研究热点。以典型的乘波体气动布局高超声速飞行器为例,机体气动弹性变形和气动热烧蚀十分显著,忽略飞行器机体挠性变形的前提不再成立,引入变质心控制的乘波体高超声速飞行器具有多刚体/弹性体耦合系统动力学特征,其建模过程和模型特性都将更加复杂。
当前研究工作主要针对多刚体变质心飞行器模型建立方法与动力学特性展开。模型建立方法包括整体法和分离法两种:整体法将可动质量块与飞行器机体之间的相互作用作为系统内力处理,分离法则需明确该作用力的具体表达式。两种方法均可依据牛顿经典力学的动量/动量矩定理或者分析力学的拉格朗日/凯恩方程等推导动力学模型。针对多刚体变质心飞行器,研究人员分析了时域/频域动力学特性,并结合其耦合、非线性、分岔等特性,实现了面向控制的模型简化,为经典控制理论在变质心飞行器上的应用奠定了基础。
因此,针对不同结构特点的多体变质心飞行器建立通用全量数学模型、基于特性提炼模型简化准则、并实现面向控制的模型简化是变质心飞行器多体复杂动力学建模问题的主要研究内容。
2.2 变质心飞行器制导控制
变质心飞行器制导控制具体包括轨迹与制导问题、复杂姿态控制问题两个方面。
1)轨迹与制导问题
采用不同控制策略的变质心飞行器,飞行模式不同,轨迹与制导实现的已知条件也不同,需要依据具体控制策略和控制特性进行轨迹与制导设计。
例如,基于变质心滚转控制,固定配平型飞行器能够实现BTT(Bank-to-turn)飞行模式,但其只有过载方向可控而过载大小不可控,应用已有制导方法时出现过载多余或不足的问题,难以实现既定目标。为此,20世纪80年代以来,相关学者开展了大量针对性研究。
例如,依赖变质心俯仰/偏航配平控制,快速自旋飞行器能够实现STT(Side-to-turn)飞行模式,但其纵向运动与侧向运动存在严重耦合,这就导致传统纵/侧平面分离的制导设计思路不再适用,需要专门研究适用于快速自旋飞行器的三维轨迹规划与制导方法。
2)复杂姿态控制问题
变质心高速飞行器姿态运动具有严重非线性、强耦合特性,由此产生的复杂控制难题是变质心技术应用面临的核心问题,主要包括:欠驱动控制、抗饱和控制和强耦合控制。
欠驱动控制。受飞行器内部空间约束和总体布局限制,基于变质心方式实现高速飞行器姿态控制通常存在欠驱动特性——控制输入个数少于系统的自由度。例如,变质心滚转控制只能实现滚转姿态控制,变质心配平控制只能实现俯仰和偏航姿态控制。采用变质心实现高速飞行器三通道姿态控制属于典型的欠驱动系统控制问题。目前,解决变质心欠驱动控制问题的基本思路主要有两种:(1)利用先进的欠驱动系统控制理论和方法,如文献[67]研究一种基于无源化的欠驱动系统控制方法,基本思想是实现系统能量的重新分配;(2)开展变质心与其他手段的复合控制,如文献[68]引入直接力实现变质心/直接力复合控制。
抗饱和控制。飞行器内部空间限制导致可动质量块移动范围受限;变质心伺服机构动态性能和结构性能限制了可动质量块最大移动速度和加速度;另外,可动质量块速度、加速度越大,产生的惯性力(矩)干扰越大。因此,变质心控制方式下,可动质量块位移、速度、加速度均受到严格约束,变质心控制存在输入饱和、状态饱和问题,需要开展变质心飞行器抗饱和控制方法研究。
强耦合控制。变质心高速飞行器动力学存在着严重的通道间耦合,实现通道间解耦的非交互控制是当前变质心飞行器强耦合控制问题的主要解决思路。另外,变质心飞行器的耦合特性还突出体现在控制增益与飞行状态之间的强耦合。例如,利用轴向质量块运动和法向气动力产生俯仰控制作用时,控制增益大小和方向与当前飞行攻角密切相关。因此,控制增益不确定的非线性系统控制方法是解决变质心强耦合控制问题的关键。
2.3 变质心高性能执行机构
执行机构设计与研制是变质心控制技术工程化应用的重要环节。变质心执行机构技术需要解决两大问题:1)执行机构总体配置问题,2)高性能伺服控制问题。
变质心执行机构总体配置是指在飞行器总体布局约束下,合理设计变质心执行机构的结构参数,使可动部分质量、移动范围等满足系统控制能力要求,使不可动部分的导轨及其他支撑部件等满足刚度、强度等结构性能指标。为此,变质心执行机构总体配置应遵循以下基本原则:
1)尽可能利用飞行器内部已有结构作为执行机构可动部分,降低系统总质量,增大可动质量比,提高控制能力。例如,利用战斗部等已有部件作为可动质量块,有效提高变质心俯仰控制能力。
2)合理设计可动质量块运动形式,避免多个可动质量块的运动干涉。例如,单个可动质量块沿径向导轨移动,该导轨绕飞行器纵轴旋转,避免二维变质心采用两质量块正交配置的运动干涉问题。
3)合理设计可动质量块质量特性、移动行程和控制维数等,尽可能降低控制耦合干扰,保证变质心控制能力需求。文献[80]就对质量块移动产生的附加扰动力矩以及耦合干扰进行了定量分析,提出可降低通道间耦合和附加扰动作用的机构配置方法。
为变质心执行机构设计高性能伺服控制系统是利用变质心技术实现高速飞行器姿态控制的关键。高速飞行器具有超高速、高动态、高过载飞行等特点,用于实现高速飞行器姿态控制的变质心执行机构不仅要满足控制能力大小需求,更要满足严苛的动态特性需求,包括:快响应、高动态、大功率、高效率、抗高过载能力等。因此,研究高精度、快响应、强鲁棒控制算法是解决变质心高性能伺服控制问题的主要途径。
2.4 变质心飞行器系统仿真与评估
变质心作为一种新概念控制手段,特性复杂、工程化难度高,引入仿真与评估技术对于提高变质心飞行器系统性能、缩短研制周期、降低研制成本具有重要意义。系统仿真与评估工作主要包括四个方面:仿真平台与可视化演示系统构建、高置信度精细化仿真模型设计、系统性能指标提取与指标体系建立、性能评估通用方法研究。
面向变质心高速飞行器的仿真平台与可视化演示系统应具有通用化、模块化、可拓展等特性,能够结合仿真对象具体需求实现仿真评估算例快速搭建,完成仿真条件快速配置,实现纯数学仿真或半物理仿真,从而具备变质心执行机构、导引头等分系统性能分析评估的能力。例如,文献[81]就基于LabVIEW设计了变质心执行机构性能分析与可视化演示系统,通过与研制的变质心控制机构样机互联,实时分析评估机构性能。
高置信度精细化仿真模型是变质心高速飞行器仿真与评估的核心。以数学仿真为例,建立的变质心高速飞行器高置信度数学模型应包括:风场、重力场等高保真环境模型;气动模型、通用动力学模型、伺服机构模型等变质心飞行器模型;轨迹规划、制导系统、控制系统等算法模型。
性能指标及指标体系是实现变质心高速飞行器仿真评估的重要工具,为提升系统性能提供依据。建立的评估指标体系应兼顾多层次系统性能评价需求,包括:执行机构、传感器等部件级评估指标;飞行器全量/简化模型置信度评估指标;导航/制导/控制等算法级评估指标;基于数学仿真/地面试验/飞行试验多源数据的评估指标;复杂动态战场环境下的作战效能指标等。
采用有效的性能评估方法给出变质心高速飞行器系统性能综合评价与优化建议是开展系统仿真评估的最终目的。选取评估方法时,应充分考虑评估对象特点和系统优化方向,常用方法有层次分析法、灰关系评估法、模糊综合评估法、主成分分析法、熵值法等。
3 研究方向展望
高速飞行器飞行特性复杂,应用场景日益多样化,进一步提高控制效率、提升控制性能成为变质心技术应用于高速飞行器研究的重要任务。一方面,需要深入挖掘适用于变质心控制的新模式、新理论;另一方面,开展关键问题之间的横向融合与匹配研究有望进一步发挥变质心控制优势和特点。为此,提出以下四个方向的研究建议。
3.1 变质心多模式复合控制
变质心复合控制能够充分发挥不同控制手段的优势和特点,有效提升飞行控制能力和控制性能,得到了相关学者的关注。例如,Wei等利用变质心/直接力复合实现了滚转和偏航通道控制,解决了纵向单可动质量块欠驱动控制问题;王霄婷等研究了变质心/直接力在不同飞行高度的串行复合控制,解决了高空稀薄大气条件下无有效气动力可用、低空稠密大气条件下侧喷扰流严重等问题,实现了高速飞行器大空域飞行。
除了不同控制手段复合,本文在此提出一种新的适用于变质心的复合控制策略——变质心多模式复合,即附加惯量消旋模式、质量矩姿控模式、操稳性能调控模式的复合。以质量矩姿控/操稳性能调控模式复合为例,依据飞行高度变化动态调整高速飞行器稳定度大小,应对高空/低空操控能力大范围变化,提高不同高度上的质量矩姿控模式的控制性能,有效兼顾了高空/低空不同机动任务需求。同理,该复合策略也能够解决高速飞行器横向大机动、快速下压、平稳巡航等不同飞行弹道转换下的操控性能变化需求。
变质心不同控制模式有快慢模态之分:附加惯量消旋、质量矩姿控模式属于快模态,操稳性能调控模式属于慢模态。因此,变质心多模式复合包含了多模态复合,实现变质心多模式高性能复合控制就必须解决复杂、强耦合、多变量非线性系统多模态高效复合控制问题。
3.2 变质心智能控制算法
变质心高速飞行器多体动力学具有强非线性、强耦合、快时变、强不确定等复杂特性,其控制还面临欠驱动、状态/输入饱和、强耦合等挑战,一般控制算法处理难度大。智能控制具有在线学习、自适应、推理决策等能力,能够大大降低控制对于对象模型的依赖,因此,引入智能控制算法实现变质心高速飞行器的高性能控制是未来的研究热点。
在变质心高速飞行器智能控制方面可能取得突破的方法有智能自适应控制、神经网络控制、模糊控制、专家控制等。例如,吴宏鑫院士经过航天控制领域多年研究实践,提出基于特征模型的智能自适应控制,结合对象动力学特征、环境特征和控制性能要求建立特征模型,然后将智能控制和自适应控制结合实现复杂系统智能自主控制,该方法在飞船再入返回自适应控制等众多复杂系统中得到应用和验证,未来有望研究应用于变质心高速飞行器,解决其复杂高性能控制问题。
3.3 变质心总体随控优化设计
总体布局是确定变质心飞行器控制模式、控制策略、控制维数、控制能力等具体实现方式与控制性能的前提,也决定了变质心多体动力学模型的复杂程度,因此,变质心飞行器总体对控制效能的影响十分显著,开展面向控制的总体优化设计,实现总体与控制匹配协调是提高变质心高速飞行器控制性能的有效途径。
作者及所在团队针对高速飞行器提出以控制系统期望性能为优化指标的总体随控性设计思想,打破了传统设计中总体与控制顺序进行、控制独立于总体、总体设计后不管的模式,基于建立的控制性能总体参数表征模型,实现了降低高速飞行器控制耦合、控制非线性的总体设计方案。
变质心高速飞行器多体动力学特性使得总体与控制的关联性更为复杂,将总体随控优化设计思想应用于变质心高速飞行器以实现变质心总体布局与控制闭环匹配和二者协调统一尚需进一步研究。如图6所示,需要基于变质心高速飞行器总体布局的动力学特性表征模型,实现面向控制的总体优化设计,最终提高变质心控制效能。
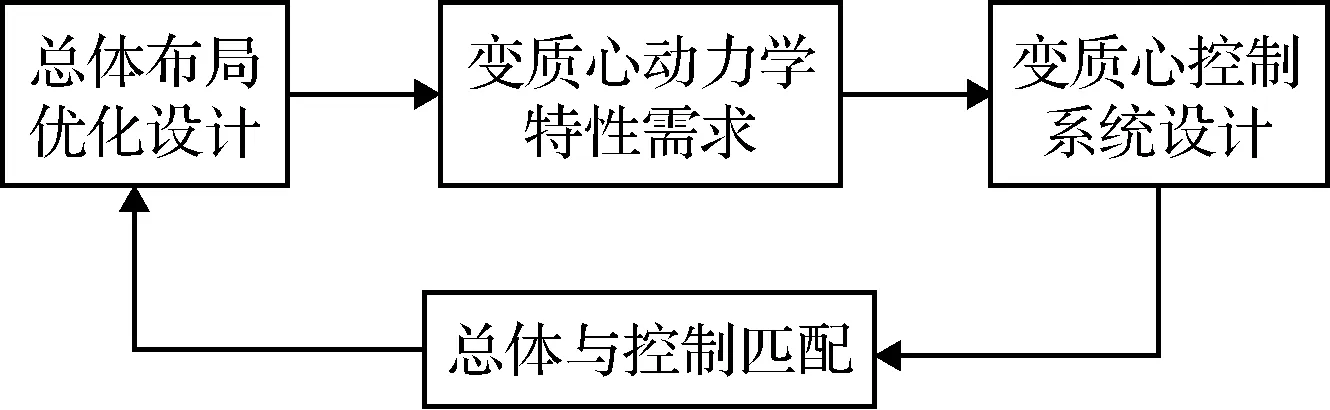
图6 变质心飞行器随控优化设计示意图Fig.6 The control-configured optimization principle for moving mass vehicles
3.4 制导/控制/伺服一体化设计
变质心高速飞行器的轨迹和姿态运动存在严重耦合。一方面,在超高速、强机动飞行条件下,飞行器制导控制分离设计条件难以满足;另一方面,由变质心高速飞行器动力学特性已知其质点平动受到刚体转动角速度的影响,即轨迹运动受到姿态运动的耦合干扰。因此,针对变质心高速飞行器开展制导/控制一体化设计十分必要。
此外,由变质心高速飞行器动力学特性可知,变质心执行机构除了为姿态控制提供所需控制力矩作用外,还给飞行器轨迹运动、姿态运动引入了复杂的惯性力和惯性力矩扰动。而高速飞行器实时飞行状态也决定了变质心机构伺服系统所处的工作过载、工作温度等,影响伺服系统带宽、上升时间、精度等实时控制性能。可见,变质心机构伺服系统与高速飞行器机体之间也存在严重耦合。因此,在制导/控制一体化的基础上,进一步考虑伺服系统,开展针对变质心高速飞行器制导/控制/伺服一体化设计研究,对于提高变质心执行机构性能,改善高速飞行器控制效能具有重要意义。
4 结束语
变质心控制模式多样、控制效率高、效费比高,优势十分明显,是实现未来高速飞行器大空域、大机动、高精度等复杂飞行任务的有效手段。为此,针对其多体动力学特性、强耦合欠驱动非线性控制、高性能执行机构等关键技术问题,本文指出未来最具价值的四个研究方向,将有助于推动变质心技术在高速飞行器上的工程化应用。
猜你喜欢
天然气与石油(2022年5期)2022-11-01 09:03:00
天然气与石油(2022年4期)2022-09-21 07:05:54
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
作文大王·低年级(2020年2期)2020-03-13 08:10:04
电子制作(2018年2期)2018-04-18 07:13:25
中国铸造装备与技术(2017年3期)2017-06-21 11:33:46
中学生数理化·中考版(2015年12期)2015-09-10 07:22:44
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
导航定位与授时(2014年2期)2014-04-27 13:41:08
河南科技(2014年1期)2014-02-27 14:04:17