成像卫星在轨智能处理技术研究进展
2022-05-12 05:30:58王兆魁方青云韩大鹏
宇航学报 2022年3期
王兆魁,方青云,韩大鹏
(清华大学航天航空学院,北京 100084)
0 引 言
近年来,随着遥感技术快速发展,一大批高分辨率、低重访周期的成像卫星不断涌现,能力不断增强,在应用卫星中的地位日益凸显。目前,遥感技术已经广泛应用到港口与机场流量监测、交通监控与疏导、城市规划与建设等众多领域。然而,在火灾监测报警、海上目标搜救和火山、地震自然灾害评估等重大紧急任务中,采用地面离线处理星上传回数据的方法,耗时长久,会耽误抗震救灾、人员搜救的黄金时间,因此星上在线处理将成为未来遥感技术的重要发展方向。利用人工智能(AI)技术,使成像卫星具备在轨自主判断态势、识别对象、实现处理与决策的能力并及时将有效信息传回地面是完全可能的。
人工智能的目的就是让机器也能够像人一样思考,去完成以往需要人的智力参与的任务,把人类从简单、重复、枯燥和危险的工作中解放出来。近年来,大数据技术、高性能处理器的出现,特别是图形处理器(Graphics processing unit,GPU) 的不断优化升级,使得以深度学习为代表的新一代人工智能所需的海量训练样本集和大算力的硬件计算平台得到满足。深度学习是机器学习领域中一个新的研究方向,相比于传统以特征工程和模板匹配为代表的机器学习而言,深度学习能通过复杂的网络结构自动学习样本数据的内在规律和表征层次。在这些学习过程中获得的特征、信息,对诸如文字,图像和声音等数据的解释有很大的帮助,并且效果远超之前的相关技术。这使得深度学习在计算机视觉、机器翻译、自然语言处理、数据挖掘、博弈决策生成等领域中开始接近或超越人类,具备了初步的感知和学习能力。在计算机视觉领域,2012年AlexNet以绝对优势获取当年ImageNet LSVRC分类挑战赛的冠军,引发了学术界和工业界对卷积神经网络研究的浪潮,此后网络不断变“深”变“宽”。2015年微软提出的152层深度残差网络ResNet在分类挑战赛中取得了错误率3.57%的成绩,首次超过了专业人员在ImageNet数据集上错误率5.1%的成绩。
航天领域是人工智能技术应用最前沿也最具挑战的领域之一。比如,美国好奇号火星车通过车载化学相机、导航摄像机以及智能软件AEGIS就能独立完成寻找岩石、土壤样本的任务,从而解决了因距离太远造成的指令时间等待漫长的问题。中国嫦娥五号探测器通过人工智能技术对月球着陆点进行自主选择,在其软着陆过程中,探测器会一直对着陆地点进行扫描,计算分析是否安全,并做出判断和决策。根据航天器的智能化水平大致可以将其分为人工操作、自动化、有人地面智能推理、无人地面智能推理、在轨智能推理、自主思考六个阶段。目前大多数航天器的智能化水平处于其中第二至第四阶段,处于这几个阶段的航天器通常需要通过地面向其发送任务指令再开始工作,工作完成后卫星将信息传回地面,最后地面再进行分析、处理和回应。
对于成像卫星来说,传统地面参与的方式响应慢、时效性差,特别是对于灾害救援、突发事件监控等紧急的任务。利用在轨智能技术,成像卫星在星上就可以在线识别特定目标,其中对于一些重要目标可以实时传送包括成像时刻、目标经纬度、目标大小、目标属性、速度以及方向等高价值信息,可以让地面做出快速的应对措施。
近年来,世界各国的航天团队都在向第五阶段在轨智能推理努力。2020年9月,欧空局、英特尔公司和西班牙加泰罗尼亚理工大学合作研制的欧洲第一颗AI地球观测卫星PhiSat-1成功发射。PhiSat-1卫星上装备了一合新型高光谱热像仪HyperScout-2,并借助英特尔的嵌入式AI加速器Movidius Myriad 2来进行成像判云操作,相比原来节约了30%的下行带宽,显著降低了链路成本,同时节省了地面人员大量无效处理时间。2019年12月,美国洛克希德-马丁公司设计的智能卫星“小马快车1号” (Pony Express 1)成功发射,目前该卫星正在开展在轨试验,测试包括软件定义任务、多核处理器工作性能及先进卫星网络通信技术等。洛克希德-马丁公司还计划利用大量智能卫星搭建空间云计算平台以实现空间网状网络通信。
国内众多高校和研究所也正在开展在轨智能有关研究工作。长光卫星技术有限公司发射的“吉林一号”光谱01和02星已经开展了舰船、飞机等目标的在轨智能识别与和监测验证;中科院软件所发射的“天智一号”软件定义试验卫星进行了云判读、高性能计算、软件重构等多项在轨处理技术的验证。
1 成像卫星在轨智能处理的主要技术难点
星上处理与地面处理相比,最大的难点在于计算资源受到卫星体积、质量、能源及成本的限制。这些限制对星上智能处理技术的推广实现提出了更加苛刻的要求。因此,需要在保证核心任务的情况下,根据其他任务的重要性进行定量分析,从而对在轨智能处理资源进行合理的设计与分配。
具体而言,目前成像卫星在轨智能的限制主要体现在以下四个方面:
1)星上计算资源与卫星质量、功耗之间存在矛盾。受到卫星质量和功耗的限制,星上处理单元无法像地面一样使用大功率、高性能的处理器。有限的计算能力会限制星上图像分类、目标检测等智能处理算法的准确率和实时性。
2)智能算法仍存在挑战。成像卫星智能处理算法虽然近些年取得了令人瞩目的进步,但目前在轨智能还有一些挑战需要克服,比如遥感小目标识别、实时性和多源信息融合等。
3)缺少大规模数据集。相比通用自然图像数据集,目前公开遥感数据集规模都偏小,并且遥感图像的背景复杂度远远大于自然图像。大规模数据集的缺少会降低算法的鲁棒性,使其不能在突发情况下进行准确判断,比如雨雪、大雾以及光线偏弱等较为恶劣拍摄环境。
4)高效能在轨计算平台设计困难。设计在轨智能计算平台需要在小功率下获得大算力,还要应对高低温等空间环境,因而高效能的在轨计算平台设计是一项艰巨的任务。
总之,成像卫星在轨数据实时处理面临数据量巨大、实时性要求高、智能算法复杂、星上资源少、算力弱的挑战,高低温、热真空、强辐射等空间环境特性也会造成一定的困难。此外,诸如智能算法与硬件平台的适配问题也亟需解决。硬件优化加速主要针对的是一些通用型的神经网络,而经过软件算法优化的网络,其结构会发生一定的变化,使其无法充分利用硬件加速库。
2 成像卫星智能处理算法研究进展
图像分类和目标检测作为计算机视觉领域内的两个重要方向,随着深度学习技术的快速发展,特别是深度卷积神经网络的出现,取得了突破性的进展。其中,目标检测的任务难度要大于图像分类,其算法复杂度也普遍偏大。这两类视觉任务共同的核心关键是特征提取,而深度学习能通过复杂的网络结构和海量的数据,自动学习出最有效的特征,从而避免了传统方法特征人工设计耗时久、泛化性差的缺点。
2.1 图像分类
图像分类算法在成像卫星应用中主要用于场景分类。场景分类任务即给定一张图,判断其类别,比如机场、港口、河流、森林、建筑用地等。目前场景分类一般用于国土资源监测、农作物测收、森林覆盖率统计等。
光学遥感图像场景分类常用的数据集包括UC Merced,Functional Map of the World(fMoW),BigEarthNet等。其中UC Merced数据集是第一个公开的用于高分辨率遥感图像场景分类的数据集。相比现在的数据集,该数据集规模偏小且缺少图像变化和多样性。fMoW数据集提供63个细粒度类别,并包含来自200多个国家/地区的超过100万张图像。
表1统计了目前用于场景分类的数据集,提供了包括场景类别数、每类的图片数量、数据集规模、图像空间分辨率、图像尺寸和数据集发表年份的信息。
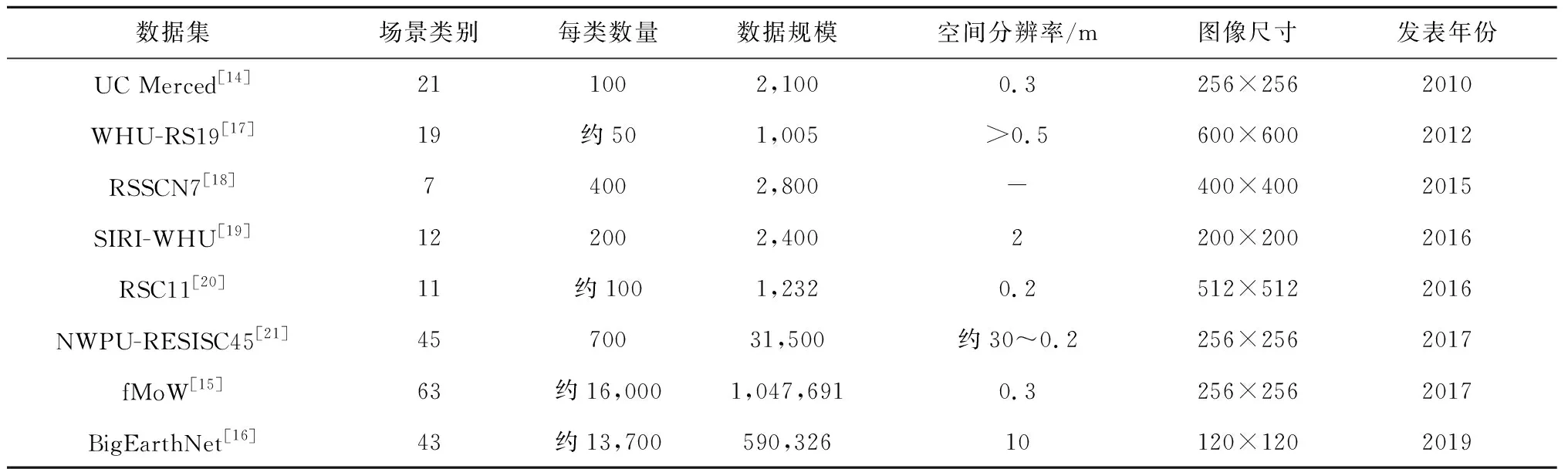
表1 场景分类数据集统计Table 1 Image classification data sets
目前,深度卷积神经网络已经在大型自然图像数据集上取得了一系列令人瞩目的成果。经过预训练的卷积神经网络具备强大的泛化能力,因而可迁移到图像场景分类用途。比如将VGG、GoogleNet等深度卷积神经网络应用于光学遥感图像场景分类。采用深度学习与机器学习相结合的方式,利用网络学习得到深度特征,并利用传统学习方法中的支持向量机、极限学习机等完成分类任务,最终实现场景的高精度分类。上述两者都是基于单一网络的深度特征完成的,还可通过融合多个网络的深度特征,增加融合特征的信息,进而提高分类性能。
2.2 目标检测
目标检测是成像卫星应用中最为重要技术之一,它是指利用算法搜索到兴趣目标并标记其类别,主要包括飞机、舰船、车辆、建筑物和桥梁等。目标检测在城市规划、灾害检测、丢失船只搜寻等领域有着广泛的作用。同时,近年来高分辨率成像技术迅猛发展,WorldView系列、高分系列等成像卫星相继发射,海量的高分辨图像为遥感目标检测技术发展带来了新的机遇和挑战。
目前,已经有一大批公开的遥感目标检测数据集,它们是目标检测发展的重要基石,同时更大、更具挑战性的数据集的出现也推动了目标检测技术的发展。表2给出了一些常用的公开光学遥感目标检测数据集,并提供了包括目标类别、图像规模、实例数目、空间分辨率、标注方式和发表年份的信息。其中TAS、ORIDS和DLR 3K Vehicle数据集用于检测车辆。TAS和ORIDS的发布时间相对较久,规模偏小,图像质量粗糙,由于遥感目标具有方向任意性,因此ORIDS数据集采用了旋转框对目标进行标记;DLR 3K Vehicle则是2015年提出的大规模高分辨的遥感车辆检测数据集,其图像宽度接近6K像素;NWPU VHR-10是被广泛使用的数据集之一,包含飞机、舰船和车辆等10种兴趣目标;HRSC2016是舰船目标检测数据集,其包括了海上及码头等各种场景,并且包含上到航母下到游艇的不同型号、大小、形状的各种船只实例;UCAS-AOD数据集用于飞机和车辆两种目标的检测;DOTA是目前该领域中最为广泛采用且最具挑战性的数据集之一,相比之前的数据集,DOTA同时使用水平框和旋转框标注,且目标实例数较多;xView是目前规模最大、最多样化的遥感目标数据集,提供了超过百万级的实例目标,数据来源于WorldView-3卫星拍摄,图片覆盖区域超过1400 km;DIOR数据集是最新提出的一个光学遥感图像目标检测数据集,比DOTA数据集规模更大,使用水平框标注。虽然DOTA、xView和DIOR数据集已经是规模较为庞大的数据集了,但是还无法与通用目标检测领域的代表数据集PASCAL VOC和MS COCO比肩。此外,数据集的全面性也有待提升。规模足够大、全面的数据集能够极大推动该领域的发展,不仅能为模型训练提供充足的样本支持,也能为各个模型的评估和比较提供客观公正的平台。
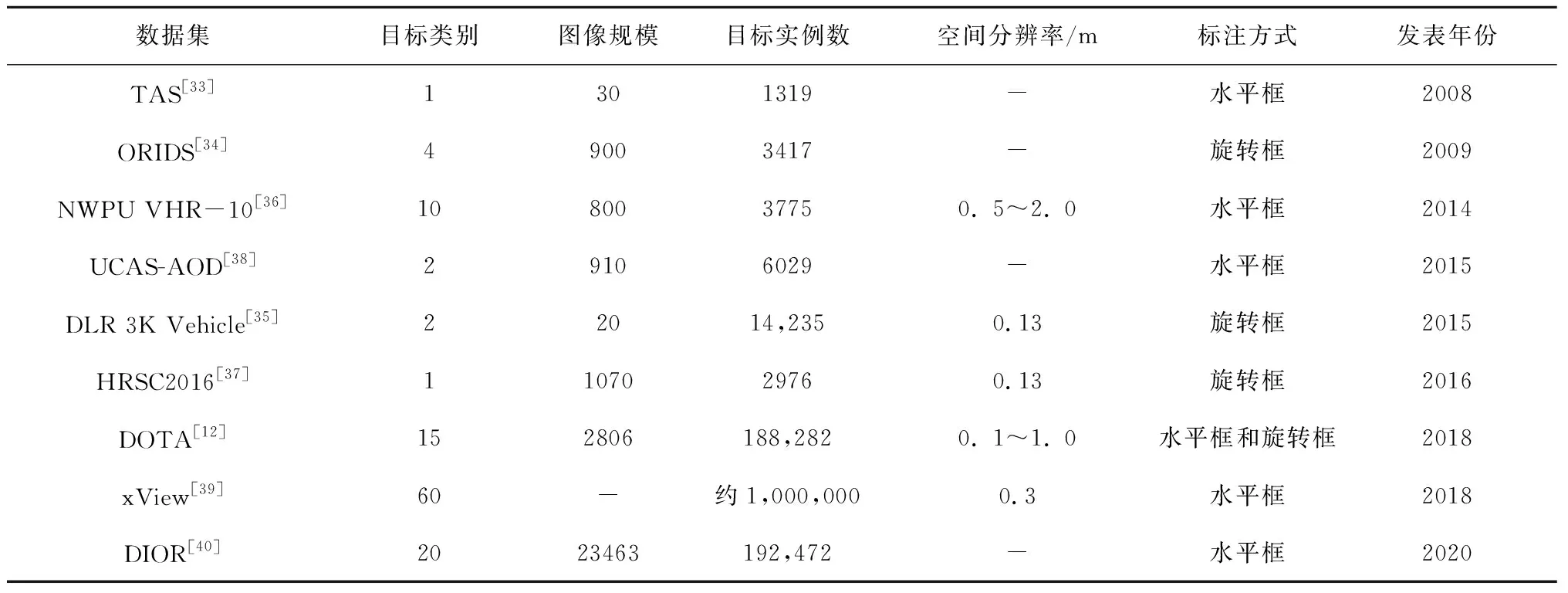
表2 光学遥感目标检测数据集Table 2 Optical remote sensing image data sets for object detection
相比可见光,合成孔径雷达(SAR)具备透云、夜间观测、受光照条件影响小等优势。自从2017年第一个公开的专门用于SAR图像舰船目标检测的数据集SSDD开始,SAR图像数据集不断地涌现,但目前SAR数据集大多是针对遥感船只检测的。后续还有SSDD+,与SSDD一致一共有1160幅图像和2456个舰船,但从原先的水平框标注变成旋转框。AIR-SARShip-1.0数据集包含31幅图像,图像尺寸约为3000×3000,空间分辨率包括1 m 和3 m,场景类型包含港口、岛礁、不同等级海况的海面,目标覆盖运输船、油船、渔船等十余类近千艘舰船。SAR-Ship-Dataset以高分三号卫星SAR数据和Sentinel-1卫星SAR数据为主数据源,共采用102景高分三号和108景Sentinel-1 SAR图像,共计43819个船舶实例。MSTAR是美国国防预先研究计划局(DARPA)实测SAR地面静止目标数据集,分辨率0.3 m,包含自行榴弹炮2S1、装甲侦察车BRDM2、装甲运输车BTR60、推土机D7、坦克T62、坦克T72、货运卡车ZIL131、自行高炮ZSU234等军事目标。
除了星上资源少、算力弱、实时性要求高的困境外,遥感目标检测还面临背景复杂,目标宽范围变化、方向任意、小目标识别的问题。遥感图像相对自然图片,在数千米的视野半径范围内存在各种复杂背景。这些复杂背景会对检测器造成强烈的干扰。由于卫星拍摄高度和成像分辨率往往各不相同,即使是同一类物体,本身物理尺寸也可能大小差异巨大,比如空客A380飞机的长度大约73 m,而小飞机长度有的只有几米,因此检测器必须能适应目标宽范围的尺度变化。由于采用俯视视角,兴趣目标方向可以是任意的,因而要求检测器具备方向鲁棒性。此外,遥感图像中需要检测的目标大多为小目标,虽然目标本身物理尺寸可能很大,但相比于几公里的拍照视野,检测目标就显得相对较小,往往不到整个画幅的1%,而目前如何实现对小目标的精准识别是整个检测领域最具挑战性的问题之一。
与通用的目标检测模型一样,基于深度学习的遥感目标检测模型也大致可以分成两类,双阶段模型架构、单阶段模型架构。图1展示了两种模型架构的检测流程。双阶段检测算法将目标检测分为定位和识别两个过程,相比单阶段多了候选区域生成的步骤,实际上候选区域生成相当于粗粒度的检测,然后再用检测头进行精细检测,因而该类算法一般具有更高的检测精度,比如R-CNN、Fast R-CNN、Faster R-CNN等检测算法等。此外单阶段算法,如RetinaNet、SSD、EfficientDet、YOLO等检测器,利用回归思想同时完成检测与识别,相对第一类“双阶段”方法更追求一种精度和速度的平衡。表3提供了各类检测器在目标检测MS COCO数据集上的测试结果,其中检测器列括号内的数字代表测试图像输入尺寸。
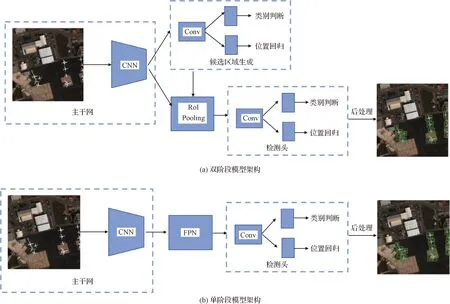
图1 双阶段模型和单阶段模型架构对比Fig.1 Comparison of two-stage model architecture and single-stage model architecture
目前最新的YOLOv4、YOLOv5检测算法对原先的YOLO进行了大量优化,使其在匹配甚至超越双阶段精度的同时,保持比双阶段算法快十几倍甚至几十倍的速度。
在Faster R-CNN中首次提出的锚点机制虽然目前被广泛应用,但是也存在一些缺点,如针对不同形状、大小的目标需要设计一些超参数,这些超参数的值对最终的精度影响很大。此外,锚点机制会产生许多不包含目标的负样本框,从而导致严重的正负样本不平衡问题,同时大量的锚框增加了在计算交并比时计算量和内存占用。针对这些问题,FCOS采用逐像素检测的思想,实现了无锚点的解决方案,并且提出了中心度的思想,同时,在召回率等方面表现接近甚至超过目前很多基于锚点的目标检测算法。此外著名的无锚点模型还有CenterNet、CornerNet、ExtremeNet等。虽然目前无锚点方法在检测中是一个热点,但是模型在精度和速度方面还没超越基于锚点的方法,因此这两种方法将会共存很长一段时间。

表3 目标检测器在COCO数据集上对比Table 3 Comparison of object detectors on COCO data set
目前,基于候选区域生成的双阶段算法是遥感目标检测的常用算法,如AVPN、HRPN、MS-VANs、GlidingVertex和APE等。该类算法大多是在地面的高性能工作站、服务器上运行的,主要关注的是检测精度,而忽略了算法的计算量、参数规模等,往往存在计算量大、检测速度慢的缺陷,因此很难在资源受限、算力较弱的星上处理器上实现。未来能在星上在轨实现的智能算法必然需要兼顾精度和速度,因此单阶段算法是未来天基遥感、侦察应用中较为合适的检测器算法。YOLT借鉴YOLO的思想设计了新的检测模型,旨在能在大范围的遥感图像中快速检测感兴趣目标,检测速度能够达到0.5 km/s以上。R3Det设计了特征细化模块,通过特征插值实现特征重构和对齐,缓解了单阶段方法中特征未对齐的问题,精度有了很大提升。作者团队则提出了一种基于自适应残差空间特征双向融合模块的特征金字塔网络结构,该模块融合了多层次、多尺度的语义信息和精细的空间特征,并能自动学习出最为有效的特征。实验结果表明该模块能大大增强检测器对宽范围变化目标的检测精度,特别是对小目标的检测有较大提升。
虽然上述网络对小目标有一定的改进,但目前遥感小目标还是整个领域的难点,主要原因在于其包含的信息少,并且在网络进行下采样时,信息还会进一步丢失甚至完全丢失,导致检测效果差。此外,可见光检测还面临云层遮挡、大雾天气、夜晚无法工作等问题,这极大限制了检测的适用范围。
3 成像卫星在轨智能计算平台
目前专门面向星上使用的人工智能硬件平台还未见报道,已发射入轨的智能卫星使用的也是面向地面通用的人工智能硬件平台,比如PhiSat-1搭载的是英特尔的Movidius Myriad 2模块。
表4统计了目前国内外的一些嵌入式AI硬件平台,并提供了AI算力、功耗等信息。英伟达的AI边缘计算产品最多,技术支持也最完善。英特尔神经计算棒在性能和功耗上的表现都很亮眼,占据一定的市场。此外还有谷歌的AIY Edge TPU,搭配专门设计的深度学习框架Tensorflow Lite,达到了超高的能效比。国内也有一些公司设计了面向边缘计算的硬件产品,比如瑞芯微和寒武纪等。值得注意的是,英特尔神经加速棒、谷歌的AIY Eege TPU和寒武纪的MLU220-M.2都是外置加速设备,需要插在树莓派等开发平台上。
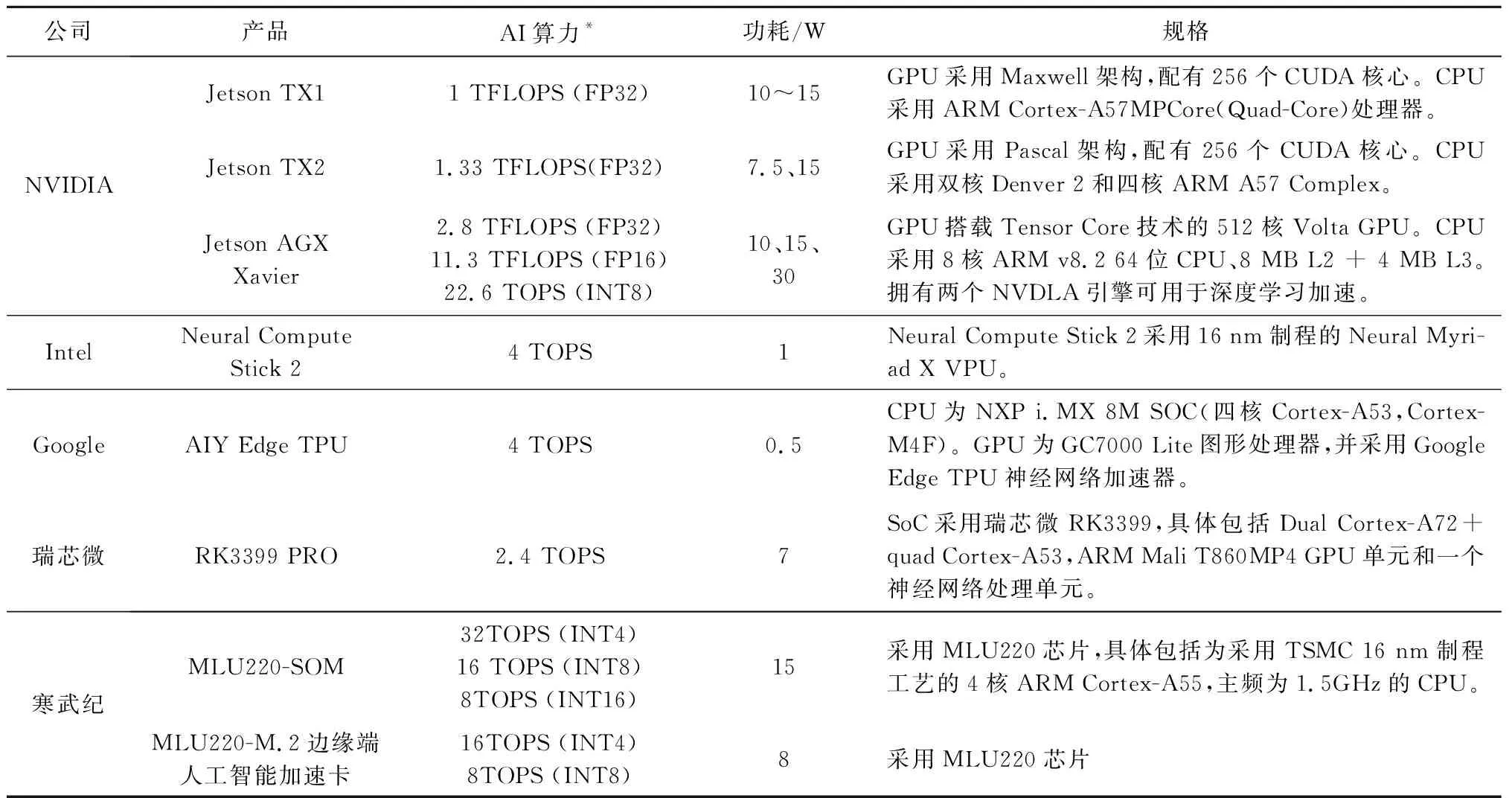
表4 国内外边缘AI硬件平台统计Table 4 Edge AI hardware platform
此外由作者团队研制的“清华科学卫星”于2020年8月6日成功发射,星上搭载了在轨智能处理模块,负责星上的图像分系统。目前该智能模块已经进行了多项图像处理任务在轨验证,实现了高效能的智能计算,在小于10 W的输入功率时,能达到每秒一万五千亿次浮点数运算。经过长期空间环境验证,该模块能在-30 ℃~90 ℃的工况下稳定工作,并支持轻量化检测模型实现实时检测,为之后的星上智能处理平台提供硬件基础。
太空中高低温、热真空、强辐射等环境特性也超出了地面通用平台的设计工况,因此通用平台在卫星上大规模的采用还需经过长时间的考验。
4 智能算法加速技术
深度学习模型已经被广泛应用,但模型“臃肿”,所需算力大,成为制约星上在轨智能实现的重要因素。深度学习的加速技术就是以“多、快、好、省”为目标,尝试从计算优化、硬件适配优化等方面减缓星上处理器负担的同时,加速算法的推理速度,以便于达到实时性要求。
计算优化主要是寻求精度和速度之间的均衡,在保证模型效果的同时,尽可能减少模型的计算量。目前业界计算优化方法大致可以分为四种,轻量化模型设计、模型剪枝、知识蒸馏和模型量化。
轻量化模型设计主要是采用计算量更小的新型卷积(如MobileNet v1-v3的Depthwise Convolution、Pointwise Convolution,ShuffleNet v1/v2的Group Convolution等)来代替标准卷积。轻量化模型的计算量通常仅有几十兆到几百兆浮点运算数,与传统的VGG、Inception、ResNet等大型网络动辄上千兆浮点运算数的计算量相比有明显优势,同时在一些分类、检测等视觉任务上与大模型的准确率差距不大。作者团队利用轻量化网络代替原先的主干网,实现对遥感兴趣目标的高效检测,在相似精度的前提下,模型参数缩小了2.5倍,计算量缩小了3.2倍,内存读写量缩小了1.8倍,最终使得速度提升了50%~118%。
相比轻量化模型设计,模型裁剪通过对模型本身做“减法”,实现化大为小。核心思想是在保持剪裁前后模型精度差距不大前提下,设计网络稀疏化机制,在某种粒度上筛选掉卷积中冗余的权重参数。其本质就是在各种粒度下寻找更为稀疏的模型表征,因此模型裁剪算法的关键在于权重筛选机制的设计以及筛选粒度的选择上。
模型蒸馏或者知识蒸馏的目标是利用大模型Teacher Network提供的监督特征指导帮助小模型Student Network训练学习,从而使得小模型既快又准。知识蒸馏的关键在于监督特征的设计,如采用Soft Target所提供的类间相似性,或使用大模型的中间层特征图或Attention Map作为桥梁,对小网络进行训练。
深度学习模型在运行时,需要进行大量的浮点数乘加运算,一般默认浮点数位宽是32bit,但是实际上完全可以用更低的位宽来量化模型的权重和特征图。目前业界广泛采用的是16bit和8bit量化,在降低模型运行读写量的同时,提高模型的运算速度。量化技术的关键在于如何控制低位宽对模型带来的精度损失。
硬件适配优化主要是利用推理引擎对模型进行优化加速,使AI算法能够部署到嵌入式平台上。目前主流的推理引擎有TensorRT、ncnn、MNN、TVM和TensorFlow Lite等。神经网络图优化和算子优化是推理引擎之所以能对网络进行加速的核心关键。TensorRT通过对层间的横向或纵向合并,使得神经网络层数大幅减少。横向合并可以把卷积(Convolution)、偏置(Bias)和激活层(ReLU)合并成一个CBR结构,只占用一个CUDA核心。纵向合并可以把结构相同,但是权值不同的层合并成一个更宽的层,也只占用一个CUDA核心。合并之后网络的计算图层数减少,占用的CUDA核心数也会减少,内存访问次数和访问量也随之相应下降,因此整个模型结构会更小、更快、更高效。使用TensorRT后,一些检测算法能达到几倍的加速,效果十分客观。不过TensorRT只能用在英伟达的设备上,对于基于ARM芯片的设备可以使用国内ncnn或者MNN推理引擎。相比TensorRT,国产的ncnn和MNN在性能优化和算子支持上都存在一定的差距。
计算优化和硬件优化仍存在适配问题,硬件优化主要是针对一些通用型的神经网络,而经过计算优化的网络,其结构会发生一定的变化,从而无法充分利用硬件加速库。比如经过模型剪枝后,网络的卷积核通道数不再是2的指数次幂,会造成因编译器的内存对齐规则限制而导致的不必要的带宽损失和算力浪费。另外,轻量化网络中深度可分离卷积算子在推理引擎中的优化程度远远比不上普通卷积算子。因此,虽然深度可分离卷积算子相比普通卷积能节省8倍计算量,但最终的速度反而比不上普通卷积算子。
5 展 望
在轨智能技术将成为未来成像卫星的重点发展方向,也是提升天基遥感应用能力的关键。成像卫星遥感信息在轨智能处理还需克服处理数据大、识别精度高、实时性强的需求与星上资源受限、算力弱之间的矛盾,此外还需要考虑空间环境的特殊性。因此现阶段成像卫星的在轨智能处理需要从智能算法、硬件平台和两者高效结合三个方面开展研究性工作。
星上智能算法应当兼顾速度与精度,使之适应弱算力平台。由于小目标本身包含信息少,再经过网络下采样之后,信息还会进一步损失。因此解决这一问题的关键在于尽可能减少小目标的信息丢失,并能够使用一些方法扩充其信息表示。此外,多颗成像卫星可通过集群飞行、星群组网等方式完成对同一区域多波段的监测,这就要求星上智能算法必须能综合利用多源数据。通过有机地融合这些多源数据之间的互补信息,获取多尺度、多维度的目标特征,进而在提升检测的鲁棒性同时,实现全天时、全天候的监测。但如何实现多源信息之间的高效融合,仍需要不断探索。
成像卫星星上信息处理平台可采用专用型智能芯片为主,通用型智能芯片为辅的多核异构的计算架构。针对航天需求优化的FPGA芯片或者ASIC芯片等专用型平台完成成像卫星大部分强实时、低功耗需求的日常信息处理任务,同时利用CPU、GPU和NPU等通用型平台实现较为庞大的智能算法,更好适应复杂的任务。还可通过地面软件上注的方式及时更新通用平台上的智能算法,提升成像卫星任务的灵活性。
智能算法与硬件平台的高效结合是提升卫星任务整体效率的关键。利用紧凑网络架构、知识蒸馏、模型剪枝、量化完成极小精度损失条件下模型计算优化。将优化后网络模型进行加速设计部署到定制FPGA或者ASIC芯片上,通过神经网络加速引擎进一步提速,满足计算实时性需求。
6 结束语
成像卫星的在轨智能处理技术为实现对自然灾害监测、丢失船只搜寻等重大突发任务的快速响应提供了新思路。星上资源受限、算力弱与智能算法复杂、实时性要求高之间的矛盾是制约成像卫星在轨智能处理发展的主要因素。针对这些矛盾,本文对智能算法、硬件平台和两者高效结合的三个方面进行了系统性分析,小目标识别、云雾及光线干扰、空间环境特殊、软硬件优化适配是目前面临的挑战。未来,星上智能算法应当兼顾精度与速度,通过信息扩充技术克服小目标识别难题,通过设计多源信息高效融合机制克服可见光检测缺陷。另外,星上信息处理平台可采用专用型智能芯片为主,通用型智能芯片为辅的多核异构的计算架构,在保证日常任务需求的同时,提升灵活性。利用定制芯片来适配优化后的网络,完成算法和硬件的高效结合,使其最终满足实时性需求。
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17 08:08:06
军民两用技术与产品(2021年10期)2021-11-25 14:17:57
作文小学中年级(2020年6期)2020-07-24 08:33:10
科学家(2019年3期)2019-08-18 09:47:43
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
科学与财富(2016年28期)2016-10-14 22:02:34
自然资源遥感(2014年3期)2014-02-27 11:56:38