加速度基线漂移时域处理方法的对比研究
2022-05-11 08:32缪惠全
地震工程与工程振动 2022年2期
缪惠全
(1.北京工业大学城建学部,北京 100124;2.北京工业大学城市与工程安全减灾省部共建教育部重点实验室,北京 100124)
引言
工程系统中常采用测试加速度信号以获取物体振动速度或者位移,而加速度信号中不可避免的噪声信号则会导致积分速度和位移的基线漂移问题,从而导致真实信号的失真,严重时甚至完全掩盖真实信号的数值。针对这一问题,不同的研究者提出了许多不同的解决方法,总体上可以分为2类:第1类是频域内的处理方法,常见的如低频截止滤波方法、低频衰减算法等,文献[1]对此作过比较系统的分析和研究;第2类则是时域内的处理方法[2-3],是指在时域内,通过不同的方式获得加速度信号的校正值,比如以仪器空采样时的均值为校正值等,将测试加速度信号减去需要加速度噪声信号,从而得到真实的加速度信号。文献[4]对比研究了Jianbo li法、Boyce法和Trujillo法,文献[5]则提出了基于L1范数正则化的校正方法等。
文中对时域内常用的校正方法进行了系统性的归类,根据获取噪声的方法不同,笔者将时域校正方法分为4类:第1类是较为简单的方法,认为加速度中误差为一常数或者符合某阶多项式的函数,通过求仪器空采样阶段的均值,或者拟合加速度时程的方式,得到加速度的噪声项,并在测试的加速度信号中删除,可以称之为噪声定模型修正法;第2类是Iwan等[6]提出的方法,以及根据这一思想而发展的王国权和周锡元[7]、于海英等[8]提出的校正方法,其基本思想是通过加速度积分得到速度,在速度时域内分段,用不同的直线段拟合,以该直线的斜率作为加速度的噪声误差,在加速度测试结果中,减去拟合的误差,从而得到真实的速度,可以概括为分段噪声常数模型修正法。第3类是由Wilson[9]提出并由李吉涛和杨庆山[10]发展的一类方法,基本思想是把加速度看作由一系列脉冲组成的信号,求得各脉冲在结束处的速度和位移,通过末尾时刻速度或(和)位移为零的条件,求得加速度的噪声值,进而修正测试的加速度,可称之为脉冲模型修正法;第4类,则是陈隽等[11]提出的利用EMD方法[12]提取信号趋势项,从而得到加速度、速度或者位移项积分结果的趋势项,并在结果中将该趋势项减掉,得到认为真实的测试结果,可以称之为EMD趋势提取修正法。以下分别就以上4类修正方法进行详细的叙述和研究。
1 噪声定模型修正法
图1(a)是一条典型的爆炸地震动信号,所用加速度计为江苏联能公司生产的电荷输出型加速度传感器(CA-YD-109 B),主要的技术指标为:测试所用加速度轴向灵敏度为2 500 pC/g(20±5℃),最大横向灵敏度≤5%,频率响应0.2~1000 Hz,安装谐振频率2 500 Hz,极性为正向(加速度方向从底部到传感器),工作温度范围-40~+150℃,冲击极限4.00 g,重量210 g。信号采样长度1 s,采样频率10 000 Hz。经去除毛刺、交流电倍频噪声和系统高频噪声之后,如图1(b)所示。其积分速度和位移结果也在图1(c)和(d)之中。可以发现,经过预处理的加速度信号A7Y,由于信号中的低频噪声,经积分之后被放大,导致积分速度和位移的基线严重漂移。(以下针对基线漂移处理的工作,针对的都是预处理之后的信号)
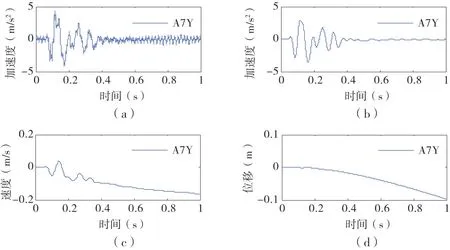
图1 爆炸地震动加速度及其积分速度和位移Fig.1 Explosive acceleration and its integral velocity and displacement
最简单最常见的一种处理方法,便是在采集到的振动信号中,减去振动发生之前仪器空采样阶段的信号均值。该处理方法,实际上默认测试到的信号中,包含了一个固定为常数的噪声,该常数的数值为仪器空采样时信号的均值。
此处将测试所得的加速度信号减去0.05 s之前时刻的加速度均值进行处理,并将处理后的加速度积分得到速度和位移,其结果如图2所示。从对比结果可以看出,相比于未在加速度测试信号减去均值而直接进行积分计算的结果,处理后的积分结果速度和位移的基线漂移均有所改善,但是改善的幅度不大。显然这与噪声的复杂性息息相关,因此,用一个固定的常数代表采集过程中的噪声误差,是远远不够的,其积分结果的基线漂移依然很厉害。

图2 原信号与减0.05 s均值加速度后所得到的积分速度和位移Fig.2 The integral velocity and displacement obtained from the acceleration which is subtracted by the average acceleration from 0 to 0.05 s
在研究中,一些学者认为[10]采用四次多项式的形式,能够较好的模拟积分以后的位移基线,即:

通常情况下,认为初始零时刻的位移和速度均为0,因此待求系数a4为0,加速度ag(t)的基线形式则为二次曲线,只要确定了该二次曲线,则可以在测试信号中减去该噪声值,从而较好的修复速度和位移基线漂移的问题。
通常用最小二乘法来拟合加速度信号的基线,其原理为:

则修正后的地震动位移为:

将上述原理依旧用于A7Y的修正,其处理后的加速度以及由此积分得到的速度和位移如图3所示。
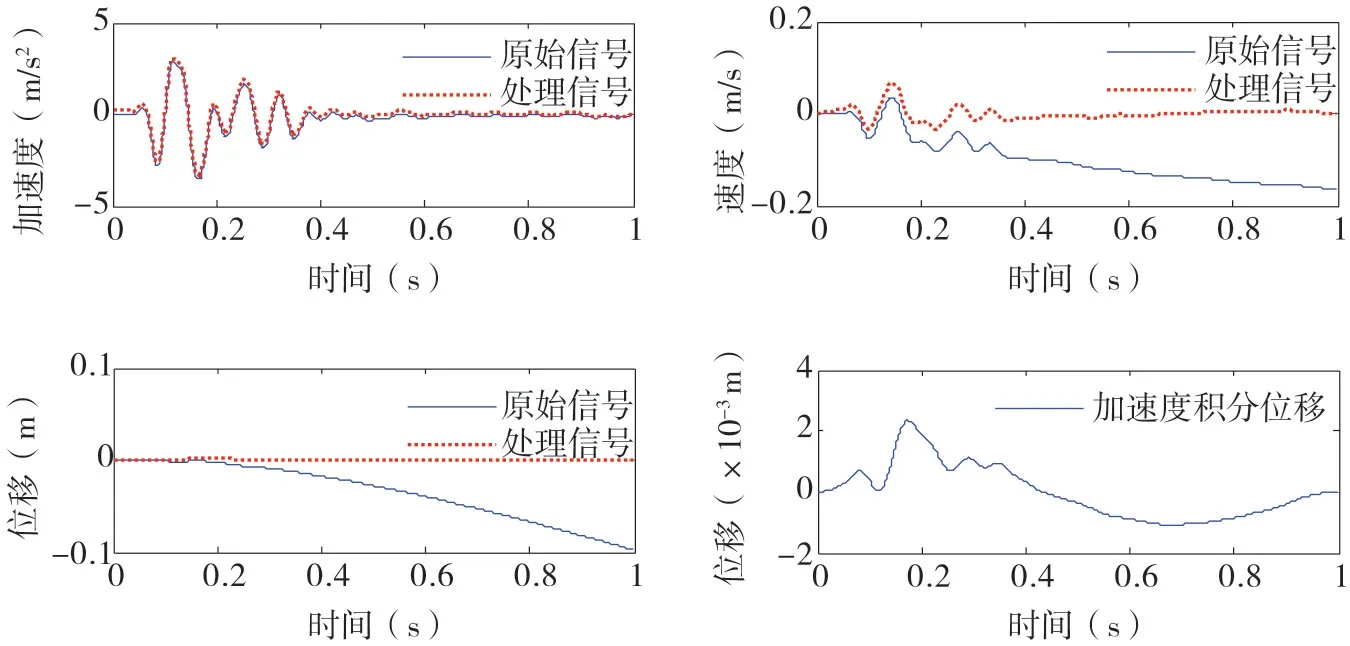
图3 基线校正后的速度与位移对比Fig.3 Velocity and displacement comparison after the baseline correction
从图3可以看出,经过基线校正后的加速度时程曲线,与未处理前并没有太大的区别,但是积分所得速度和位移的基线有了较大的改进,但是这种方法并不能较好的去除误差,依旧无法得到较为合理的时程信息。
总结上述2种加速度信号基线修正方式可以发现,2种方法都是把加速度的噪声模型,作为一个固定的多项式数学模型来拟合,分别是常数模型和二次多项式模型,显然造成噪音的的原因是复杂的,因此用一种简单统一的方式来模拟噪声显然是远远不够的。
2 分段噪声常数模型修正法
Iwan W.D.et al.在1985年研究了Kinemetrics公司的PDR-1数字式强震加速度仪,仪器采用FBR-13型加速度传感器。研究发现,尽管与模拟式强震加速度仪相比,数字式地震仪具有更低噪声和数据更易处理的优点,但是加速度信号仍然存在无法避免的噪声误差,虽然这对加速度时程影响不大,但是对经过积分之后的速度和位移,会有较大的影响,甚至掩盖真实数据。加速度基线的漂移可以归结为传感器系统小幅的物理或者电学的磁滞现象[6]。为此,他们提出了如下可选的解决方案:
可以加整个加速度时程分为3段。第1段是弱震阶段,时间为[0,t1],加速度幅值较小,无需修正;第2阶段为强震阶段,时间为[t1,t2],加速度幅值较大,需要减去修正值,该修正值是一常数am;第3阶段为余震阶段,时间为t2到末尾时刻,仍需考虑传感器的磁滞效应导致的误差,只是加速度的修正值变为af。其原理如图4所示。
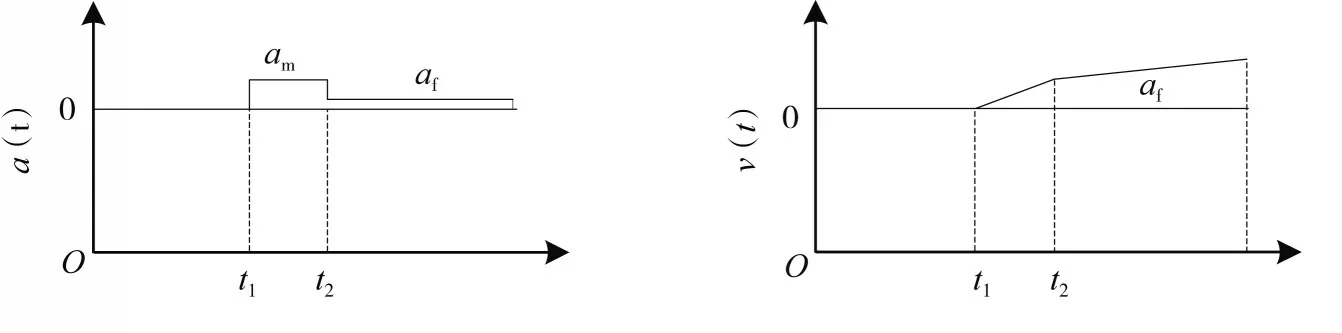
图4 Iwan方法原理示意图Fig.4 Schematic diagram of the Iwan method
对于时间t1和t2的选择,有2种方法:
(1)试验证实了该仪器小幅的磁滞现象在加速度小于50 cm/s2时候基本不发生,因此,认为此时加速度的基线漂移不发生,因此可以将t1和t2分别选在加速度首次和最后大于50 cm/s2的时刻,该方案虽然比较容易选择,但是该经验值并不具有普适性。
(2)t1时刻选在加速度时程第一次出现明显的尖峰的时刻,t2的选择应该使得最后的积分位移尽可能的小。为此,可以用最小二乘法拟合速度的末尾阶段,得到:

其中,直线的斜率af即为第3阶段加速度修正项,该直线与横轴的交点,即为时间t2。如果计算所得的时间t2在时间t1之前,那么用式(1)在确定修正时间t1和t2则更为合适。又根据速度时程的连续性条件可知:

另外,再进行上述修正之前,需要先用振动发生前一段时间仪器空采样均值修正测试的加速度数值。
如果取加速度阀值为均值修正加速度后最大幅值的1%、3%、5%、10%、15%、20%对A7Y进行校正,可以得到图5~图10所示结果。同样采用该方法,选择加速度修正的阀值为50 cm/s2,可以得到如图11所示的结果。

图5 Iwan方法校正的加速度以及积分速度和位移(阀值1%)Fig.5 Acceleration processed by the Iwan method and the integral velocity and displacement(threshold value 1%)

图6 Iwan方法校正的加速度以及积分速度和位移(阀值3%)Fig.6 Acceleration processed by the Iwan method and the integral velocity and displacement(threshold value 3%)

图10 Iwan方法校正的加速度以及积分速度和位移(阀值20%)Fig.10 Acceleration processed by the Iwan method and the integral velocity and displacement(threshold value 20%)

图11 Iwan方法校正加速度以及积分速度和位移(阀值50 cm/s2)Fig.11 Acceleration processed by the Iwan method and the integral velocity and displacement(threshold value 50 cm/s2)

图7 Iwan方法校正的加速度以及积分速度和位移(阀值5%)Fig.7 Acceleration processed by the Iwan method and the integral velocity and displacement(threshold value 5%)

图8 Iwan方法校正的加速度以及积分速度和位移(阀值10%)Fig.8 Acceleration processed by the Iwan method and the integral velocity and displacement(threshold value 10%)

图9 Iwan方法校正的加速度以及积分速度和位移(阀值15%)Fig.9 Acceleration processed by the Iwan method and the integral velocity and displacement(threshold value 15%)
观察图5~图11所示的结果可以发现:(1)50 cm/s2的阀值取值并不具有普适性,阀值取值有很强的经验性,这主要与所使用的仪器性能有关;(2)较低的阀值下,可以对速度和加速度的趋势项有较好的调整,但是积分后的位移还是有很大的误差,处理的结果并不好;(3)随着阀值取值的增大,那么加速度信号实际上相当于被调整的噪声变大,当调整值不仅抵消掉原有的噪声,并且还掩盖了真实的信号时,则实际得到的速度和位移积分曲线是调整值积分所得结果,从图10观察的结果尤其明显。
显然,试图将加速度在2个阶段内进行噪声校正,并没有改变噪声模型取固定模型的情况,这与噪声的复杂是矛盾的。因此,为了能够更好的去除基线漂移,王国权等[7]、于海英等[8]分别在这一方法思想基础上,提出了灵活地分别以一段或者多段直线拟合速度项,并以该段直线的斜率作为对应时间段内加速度的噪声误差,用以校正加速度基线。
王国权和周锡元的步骤为[7]:
(1)在原始加速度时程中减去震前部分的平均值,积分求得相应的速度时程;
(2)用一直线vf(t)=v0+aft拟合速度时程的末尾部分(对绝大多数记录取末尾部分为65~90 s,相应的v0则为65 s对应的速度值),af为速度时程基线的斜率,求得af和拟合直线与时间轴的交点tW,在加速度时程的tW~tlast段中减去af;
(3)加速度时程经一次积分得到速度时程,在速度时程中减去震前部分(0~20 s)的平均值,即对速度时程进行初始化,并令初始速度为零,即v(0)=0;
(4)由速度时程经一次积分得到位移时程。
于海英等[8]的校正步骤为:
(1)在原始加速度时程中减去震前部分0~20 s的平均值,积分求得相应的速度时程;
(2)用一条或多条直线vm(t)=v0+amt拟合速度时程的末尾部分,am为对应速度时程段零线的斜率,求得am和拟合直线与时间轴的交点Tm(m=1,2,3,…n),从Tm时刻起,在加速度时程中相应段减去am(m=1,2,3,…n);
(3)加速度时程经一次积分得到速度时程,在速度时程中减去震前部分(0~20 s)的平均值,并令初始速度为零,即v(0)=0;
(4)由速度时程经一次积分得到位移时程;
(5)按校正准则或有GPS台站同震位移作参考时,适当调整拟合速度时程末尾部分得到的直线与时间轴的交点tm,得到可靠的永久位移。
如图1(c),A7Y原始加速度信号直接积分得到的速度时程之中有一个明显的直线趋势项,因此可以用于海英等人的方法进行校正。校正的时间分别从0.06、0.1、0.2、0.3 s开始,校正的结果分别如图12~图15所示。

图12 于海英等方法校正后的加速度积分速度和位移(修正开始时间0.06 s)Fig.12 The integral velocity and displacement obtained from the acceleration processed by the method of Yu et al.(the start time for baseline correction is 0.06 s)

图13 于海英等方法校正后的加速度积分速度和位移(修正开始时间0.1 s)Fig.13 The integral velocity and displacement obtained from the acceleration processed by the method of Yu et al.(the start time for baseline correction is 0.1 s)

图14 于海英等方法校正后的加速度积分速度和位移(修正开始时间0.2 s)Fig.14 The integral velocity and displacement obtained from the acceleration processed by the method of Yu et al.(the start time for baseline correction is 0.2 s)
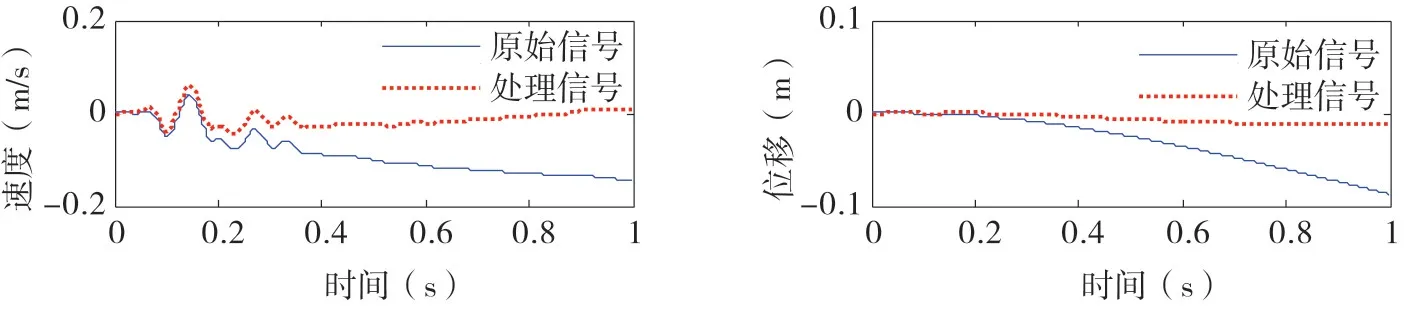
图15 于海英等方法校正后的加速度积分速度和位移(修正开始时间0.3 s)Fig.15 The integral velocity and displacement obtained from the acceleration processed by the method of Yu et al.(the start time for baseline correction is 0.3 s)
分析图12~图15可以发现,该方法对于积分速度的基线漂移有了明显的改进,但是结果仍不理想,积分后的位移,真实结果仍然被误差所掩盖。随着调整时间的前移,也就是加速度修正时间的增加,并没有很好的改善这一问题,暴露了该方法的局限性。
3 脉冲模型修正法
SAP系列的创始人Edward L.Wilson针对加速度基线的漂移问题,也提出了相应的修正方法。该方法能够保留加速度的峰值,且思路明确。其基本思路是[9]:加速度时程可以看作是一系列脉冲的叠加,正常情况下,结构在地震波脉冲的作用下,其基础最终位移是零,然而实际在该加速度脉冲下,其脉冲积累位移并不是零,因此需要把这一位移抵消掉。
如图16为某一加速度记录的示意图,加速度可以看做一系列正负方向的加速度脉冲组成。在第i个时刻,由该加速度脉冲所产生的位移为:
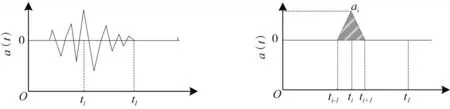
图16 Wilson校正方法示意图Fig.16 Schematic diagram of the Wilson method

式中:S i为第ti时刻加速度脉冲所产生的脉冲位移;ai为时刻ti时刻所对应的加速度脉冲峰值。则在全程有:

式中,ΔU即为最终加速度积分位移的基线漂移值。为了保持加速度峰值不变,仅调整峰值前面tL时刻的加速度,即相当于认为ΔU为前面tL时刻前加速度脉冲积分误差造成。为了避免在tL时刻加速度校正值的跳跃,构造了线性校正函数,即:

此时则应该有:

即校正后的加速度积分位移后为0。也就是:

如果正的加速度脉冲积分位移和负的加速度脉冲积分位移分别记为Upos和Uneg,同时正负加速度脉冲采用不同校正系数,则上式可以表达为:

式中:αp是正加速度脉冲校正系数;αn是负加速度脉冲校正系数。
同时假设正负脉冲所产生对最终漂移位移贡献是相同的,因此:

如此可以解得:

则当加速度脉冲为正时,校正后加速度为:

则当加速度脉冲为正时,校正后加速度为:

根据Wilson方法的原理,编写程序以处理加速度时程A7Y,根据该加速度最大值出现的位置为0.113 4 s,分别选取修正的截止时间为出现第一个加速度峰值的0.078 8 s、加速度最大值处0.112 4 s、振动基本结束的0.4 s、加速度时程的末尾时刻0.9 s、加速度全程1.0 s几个不同的代表时刻,画图得到计算的结果分别如图17~图21所示。

图17 Wilson方法校正后的积分速度与位移对比(修正开始时间0.0788 s)Fig.17 The integral velocity and displacement obtained from the acceleration processed by the Wilson method(the start time for baseline correction is 0.078 8 s)

图18 Wilson方法校正后的积分速度与位移对比(修正截止时间0.112 4 s)Fig.18 The integral velocity and displacement obtained from the acceleration processed by the Wilson method(the start time for baseline correction is 0.1124 s)

图19 Wilson方法校正后的积分速度与位移对比(修正截止时间0.4 s)Fig.19 The integral velocity and displacement obtained from the acceleration processed by the Wilson method(the start time for baseline correction is 0.4 s)

图21 Wilson方法校正后的积分速度与位移对比(修正截止时间1.0 s)Fig.21 The integral velocity and displacement obtained from the acceleration processed by the Wilson method(the start time for baseline correction is 1.0 s)
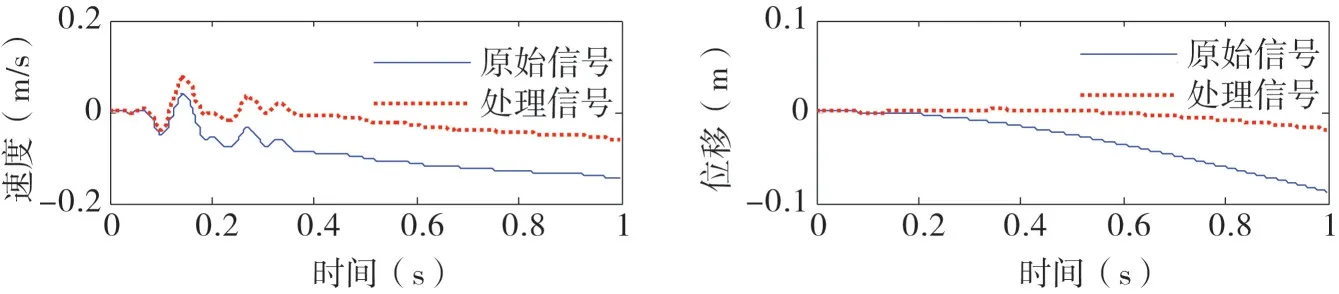
图20 Wilson方法校正后的积分速度与位移对比(修正截止时间0.9 s)Fig.20 The integral velocity and displacement obtained from the acceleration processed by the Wilson method(the start time for baseline correction is 0.9 s)
从图17~图21可以看出,随着Wilson方法校正时间的增加,积分速度和位移被调整的幅度增加,其速度和位移的漂移峰值逐渐减小,但是,相对真实的速度和位移峰值,尤其是真实的位移峰值,噪声积累的误差仍然很大,彻底掩盖了正确的波形。单纯依靠Wilson方法,并不能很好的解决这个问题。
虽然Wilson的方法将校正时间调整到时程后几秒的时候,也能够是速度的结束值为零,但是不能将终点时刻的速度和位移同时校正为零,显然,这与实际情况不符。李吉涛等[10]改进了上述做法,使得在终点时刻的速度和位移能够都满足为零的条件。其基本思路分析如下:
仍然将加速度看做一系列脉冲,则脉冲在结束时刻的速度和位移为:

式中:ΔV是结束时刻的速度值;ΔU是结束时刻的位移值;üi则是测试的加速度值;Δt则是脉冲的持续时间。
由于测试的加速度存在噪音,因此二者显然是不为零的,因此,需要对测试的加速度信号进行校正。为了不改变加速度的峰值,该调整应在加速度出现峰值的时刻tL之前,设需要调整的加速度值为:

则调整后的加速度为:

此时结束时刻的速度和位移为应该满足:

根据速度条件:

根据位移为零的条件:

又根据式(25)可以得到:

将上式带入(26)中,可以得到:

同时,根据式(27)可以得到:

将其带入式(28)可以得到:

从而得到:

由等差数列的平方和公式:

可得:

如果t1=Δt=dt,则上式简化为:

同理,可以推导得到:

计算得到m、n之后,则可以进行加速度的修正,得到式(21)所示的修正后加速度。
我们选取与Wislon方法相同的校正时间进行分析,得到的处理结果如图22~图26所示。分析可以发现:

图22 修正Wilson方法校正后的积分速度与位移(修正开始时间0.078 8 s)Fig.22 The integral velocity and displacement obtained from the acceleration processed by the improved Wilson method(the start time for baseline correction is 0.078 8 s)

图26 修正Wilson方法校正后的积分速度与位移对比(修正开始时间1.0 s)Fig.26 The integral velocity and displacement obtained from the acceleration processed by the improved Wilson method(the start time for baseline correction is 1.0 s)
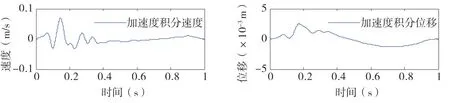
图25 修正Wilson方法校正后的积分速度与位移(修正开始时间0.9 s)Fig.25 The integral velocity and displacement obtained from the acceleration processed by the improved Wilson method(the start time for baseline correction is 0.9 s)
(1)当校正时间较短,即只对峰值前的一部分加速度进行校正,由于时程末尾处速度和位移强制为零的条件,使得调整值过大,完全掩盖了真实的加速度信号,造成了加速度信号时程被错误的调整,达不到去除噪声的结果。
(2)当校正时间增加到0.4 s,积分速度时程的趋势被明显的抑制,但是位移结果仍很差。同时对比图23和图24,表明在0.1~0.4 s加速度信号的主要部分虽然被调整,但是0.4 s之后的,仍然有影响。

图23 修正Wilson方法校正后的积分速度与位移(修正开始时间0.112 4 s)Fig.23 The integral velocity and displacement obtained from the acceleration processed by the improved Wilson method(the start time for baseline correction is 0.112 4 s)

图24 修正Wilson方法校正后的积分速度与位移(修正开始时间0.4 s)Fig.24 The integral velocity and displacement obtained from the acceleration processed by the improved Wilson method(the start time for baseline correction is 0.4 s)
(3)校正时间增加到加速度的末尾部分,甚至全程以后,速度时程改善比较明显,但是位移时程,由于末尾强制为零的条件,反而掩盖了波的真实形状。由此可见,位移结束时刻为零的条件,可能对位移波形造成很大的改变。
总的来说,采用该方法能够在一定程度上改善加速度的的基线漂移问题,调整时间较长时,会明显改变加速度的信号,当选择较大的校正时间时,对加速度时程影响不大,但是速度时程可能有较好的改善,而位移时程由于结束时刻强制为零的限制条件,反而会掩盖真实的波形,调整结果并不理想。
4 EMD趋势提取修正法
陈隽等[11]提出了利用EMD方法[12](经验模态分解法)提取振动信号中长周期成分的方法。由于造成加速度积分速度和位移基线漂移的主要成分是加速度信号中的低频噪声,也即长周期误差,同时,速度时程中的长周期成分会进一步导致位移信号的基线漂移,因此利用EMD方法去除加速度、速度或者位移中的长周期成分,得到校正后的时程就成为一种可能。胡灿阳等[13]、张志等[14]分别将上述方法用于地震加速度时程和振动台试验的加速度信号的积分处理,得到了相应的处理结果。
EMD分解的基本原理假定任何待分解信号都由一组固有振动模式构成,因此可以将信号分解为若干固有模式函数(intrinsic mode function,简称IMF)的和。假设a(t)是待分解的加速度信号,那么经过EMD分解以后,a(t)可以表达为:

式中,Cj是n个IMF分量,而rN则是分解余量,包含了信号中频率最低的成份。一般情况下,可以将rN当做信号的趋势项。因此,将加速度信号经过上述EMD分解之后,得到其趋势项,即加速度信号的残差rN,在原始加速度信号减去其残差,记得到调整后的加速度信号。对于速度和位移的处理,步骤类似,兹不赘述。
按照上述的思路,可以首先去除加速度项目中的趋势项,然后在进行时域的积分,得到的加速度趋势项、积分后的结果以及与未处理的结果,如图27所示。

图27 基于EMD方法提取的加速度趋势项和修正后加速度以及积分得到的速度与位移Fig.27 The acceleration trend term extracted based on the EMD method and the corrected acceleration and the velocity and displacement obtained by integrating the corrected acceleration
分析图27可以发现:
(1)加速度时程去除趋势项以后,积分所得速度和位移相比原先都有较大的改进,漂移总量减少,但是仍未能得到比较理想的波形,位移时程出现了较大的永久位移,且时刻结束时,速度不为零。
(2)加速度的初始和结束时刻,由于受到中间时刻信号的干扰,趋势项出现了不为零的情况,从而使得校正后的加速度在初始和结束时刻,也偏移了零,造成了积分误差。这种误差是由于人为使用EMD方法而引入的。
而观察原始的速度信号可以发现,其含有一个比较明显的一次函数趋势项,因此利用EMD分解,提取速度项的残差,并去除,进而积分得到结果,如图28所示。

图28 基于EMD方法提取的速度趋势项以及修正后时程Fig.28 The velocity trend term extracted based on the EMD method and the corrected time history
分析图28可以发现:
(1)同修正后的加速度一样,修正后的速度,由于受到趋势项的影响,在开始时刻和结束时刻,不再为零,因此求导之后得到的加速度,与原加速度相比,相差虽然不大,但是初始的加速度和速度,均不为零,也是不合理的;
(2)修正后的速度和修正前相比,有比较好的改善,只是在0.4~1 s出现了总体小于零的问题,原因在(1)中已经解释过;
针对位移中的线性趋势,可以再修正速度积分位移的结果之上,进一步去除位移时程的趋势项,得到的结果如图29所示。
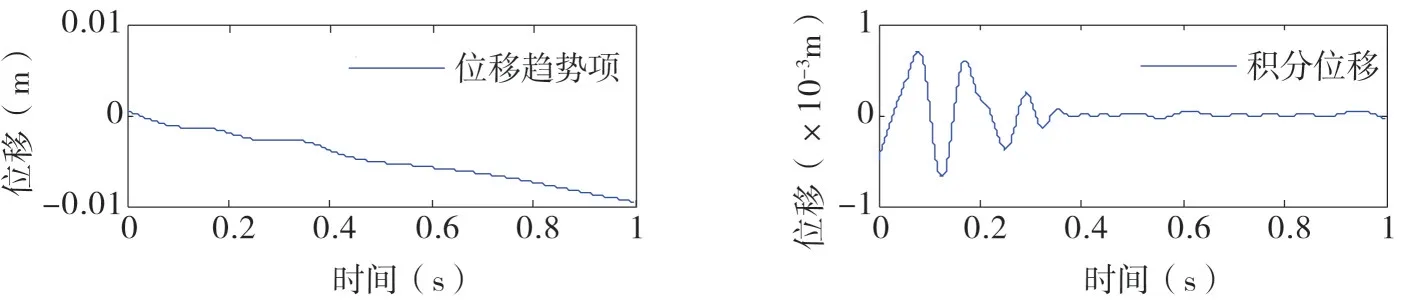
图29 基于EMD方法提取的位移趋势项以及修正后时程Fig.29 The displacement trend term extracted based on the EMD method and the corrected time history
观察图29中可以发现:
(1)去除趋势项之后的位移时程曲线,相比直接积分的结果,基线漂移问题有了很大的改善;
(2)由于趋势项的作用,在位移的初始阶段不再为零,这显然是不合理的;
为了解决EMD方法提取趋势项所带来的,初始和结束阶段,正常数据受趋势项影响而发生的漂移问题,笔者借鉴Iwan等人的研究思路,提出了分段逐步的Iwan-EMD方法。下面详述之。
5 分段逐步的Iwan-EMD方法
Iwan时域修正方法[6]基本思路是将加速度信号分为3段,对后2段通过直线拟合积分速度信号的方式修正该信号。而EMD则将待分解信号分解为若干固有模式函数(IMF)和的形式,其残差可以作为信号的长周期误差[7,9-10]。
参考Iwan分段处理基线漂移的思路和实际地震动加速度信号的特征,可以将加速度信号分为3段。其中第一段为测试仪器静止阶段,其加速度噪声由于系统的固有误差和环境因素等引起,比较稳定,表现在积分速度中,则是近似线性的趋势项误差;第2阶段为强震阶段,仪器由于较大的振动而被激发新的测试误差,导致积分速度的基线出现较大的漂移;第3阶段则为平衡阶段,仪器在最终位置上保持平衡,基线漂移误差重新变为由于系统的固有误差和环境温度等引起的比较的稳定的误差。将数据分为3段以后,再利用EMD技术,分别提取每一段的趋势项并予以去除。同时,为了保证信号的连续性,再对分端点处的数据进行微调,调整方法可参见后文所示。
以式(37)所示仿真信号为例,对文中定义的方法进行说明。式(1)所示仿真信号分为3段,分别代表了测试中的仪器静止阶段、强震阶段和平衡阶段仪器测试的速度信号,其每一阶段第1项为真实信号,第2项则是引入的趋势项信号。

采样频率1 000 Hz,式(37)表示的数值仿真信号如图30所示。若对该信号直接使用EMD提取趋势项并作为误差消除,校正后的信号和真实信号对比如图30所示。从中可以明显看出,由于受到中间阶段趋势项的影响,一、三阶段仅仅经过EMD校正,与真实信号相比有较大的误差。而若将信号分段,利用EMD分段提取趋势项并校正信号,则在分段处由于趋势项的不连续会导致校正后的信号在分段处出现间断,如图31所示。
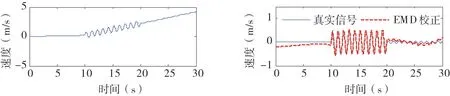
图30 仿真信号Fig.30 Simulation signal

图31 仿真信号的分段校正Fig.31 Correction of simulated signal in different segementation
实际上,EMD方法是通过对信号的上下极值点通过3次样条插值求取平均,当信号的端点恰好是极值点时,则能避免端点问题[15-16]。考察图31中的19.5~20.5 s部分,如图32(a)所示,可以发现,自外向内第1个极值点处A至分段点B处,校正后信号与原信号差异较大,由A点再向内,则修正后信号与原信号吻合较好。C点由于是第3阶段趋势项修正起始点,其吻合程度也比较好,但是B C两点不重合,导致分段点处信号不连续。考虑到地震动信号的特点,其第1、3阶段由于信号具有明显的线性趋势,因此可以认为EMD提取的趋势项是准确的,而第2段信号,EMD修正的信号在首末两个极值点内部也是准确的,EMD的端点效应,仅影响到信号首末极值点处与分段点之间的信号。因此,可以将EMD校正后的信号曲线AB段,按照图32(a)所示直线A B与A C对应点处的纵坐标之差,将曲线A B移至A C段,得到分段点处微调的信号如图32(b)和图32(c)所示。同时考虑到信号在分段点处一般幅值较小,因此其误差也较小,可以认为这种假设是合理的。最终结果如图32(d)所示。可以发现,此时不仅有效的消除了不同阶段的信号趋势项,同时克服了分段点处的不连续问题,初步表明了该方法的有效性和合理性。
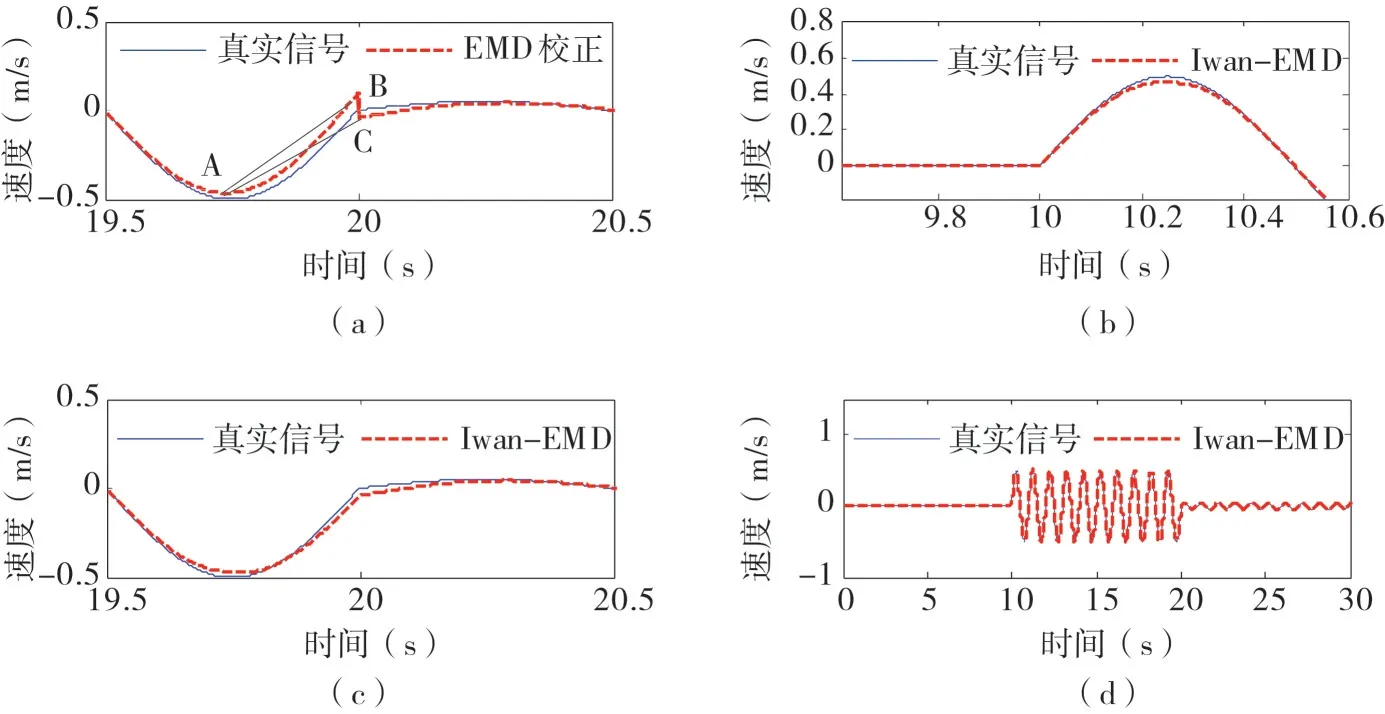
图32 分段点处的信号调整与Iwan-EMD校正后的信号Fig.32 The signal adjustment at the segment point and the signal corrected by the Iwan-EMD method
为了进一步验证该方法的通用性和合理性,改变数值信号的趋势项,如式(38)所示。

直接采用EMD校正,以及采用Iwan-EMD校正法校正后的信号如图33所示。可以发现,Iwan-EMD处理后的仿真信号的基线漂移问题仍然得到了明显的改善。

图33 EMD与Iwan-EMD分别校正后的信号Fig.33 The signal corrected by the EMD and Iwan-EMD method respectively
使用Iwan-EMD方法对A7Y进行基线漂移的校正,得到校正后的速度和位移如图34所示。修正后的速度和位移峰值为0.060 7 m/s和9.55×10-4m。在测试现场,测点A7与A11处在与爆点相同的圆上,且爆点处在两点连线的垂直平分线上,即A7与A11形成了以爆点为对称的点,所测得的信号A11Y,未经调整的速度和位移峰值分别为0.085 3 m/s和1.385×10-3m(因为信号A11Y基线漂移影响不大),考虑到现场场地土的复杂性(该实验在野外场地进行,A7点与爆点平面投影直线距离为22.8 m),可以认为该方法有效地消除了A7Y积分速度和位移的基线漂移情况,得到了较为真实的速度和位移时程。

图34 Iwan-EMD方法校正的速度和位移A7YFig.34 The correction velocity and displacement signal A7Y using Iwan-EMD method
此外,笔者还将该方法应用于工程地震动的处理中,考察集集地震TCU068南北向地震波,采用Iwan-EMD方法调整的速度和位移时程,并与直接滤波得到的结果[17]相对比,如图35所示。从图35中可以看出,2种方法处理后速度峰值和波形相差不大,吻合程度较好,位移峰值差别略大,但是滤波处理后位移时程曲线在振动开始前已有较大位移值,其滤波处理的位移信号还值得商榷。
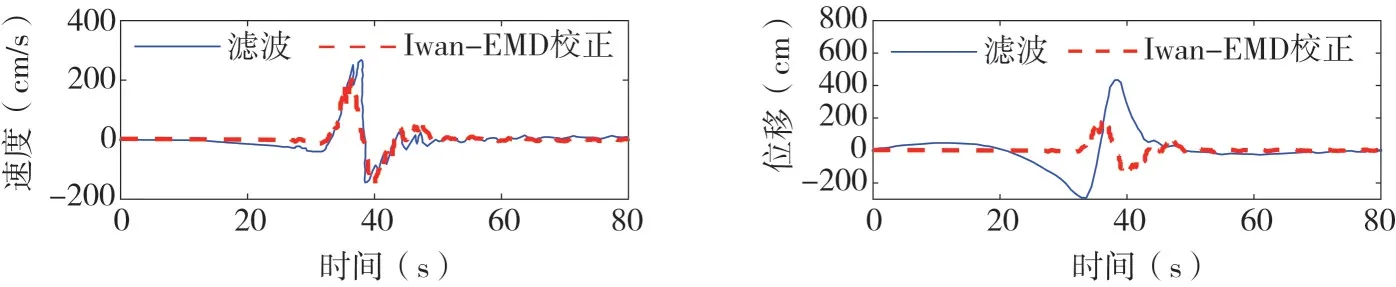
图35 Iwan-EMD方法校正的集集地震速度和位移信号Fig.35 The correction velocity and displacement in Chi-Chi earthquake using Iwan-EMD metho
6 结论
文中系统性的对比研究了时域内处理加速度基线漂移的4类方法,并在此基础上提出了在时域内可有效解决这一问题的Iwan-EMD方法,研究结果表明:
(1)噪声定模型修正法与分段噪声常数模型修正法本质上是假设加速度信号具有固定的噪声模型,原理简单算法方便,但是修正结果并不理想,适用性有限。
(2)脉冲模型修正法能够在一定程度上改善加速度的的基线漂移问题,而EMD修正法无论对加速度、速度还是位移的基线,均有较好的调整作用,但是无法避免的出现端点问题。
(3)文中所提出的Iwan-EMD方法可有效克服EMD方法处理后时程曲线首末点的漂移问题,原理明确,计算简便,仿真数据的计算结果验证了该方法的合理性。
猜你喜欢
人民长江(2021年9期)2021-10-18
科学导报(2021年7期)2021-02-22
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
大众摄影(2018年6期)2018-06-19
佛山陶瓷(2017年8期)2017-09-06
晚晴(2016年11期)2016-12-20
旅游纵览(2015年8期)2015-09-25
旅游纵览(2015年6期)2015-06-29
哈尔滨理工大学学报(2014年3期)2015-01-04
党的生活·党员电教与远程教育(2009年2期)2009-05-13