面向手功能康复训练的软体机器人设计
2022-05-09 02:13王明昊
中国机械工程 2022年8期
丛 明 毕 聪 王明昊 刘 冬 杜 宇
1.大连理工大学机械工程学院,大连,1160242.大连大华中天科技有限公司,大连,116023
0 引言
由脑卒中引起的手部运动功能丧失严重影响一个人的正常生活,并降低其生活质量[1]。对于这类患者,需要手部康复机器人做日常生活辅助,以及针对患者不同阶段手部僵硬程度进行相应的整体抓握或单个手指分离运动的被动康复训练[2]。早期研究人员提出了穿戴在手掌掌背侧的外骨骼式[3-5]以及穿戴在手掌掌心侧的内骨骼式[6]两类刚性手部康复机器人,但刚性机器人柔性不足、与手指贴合性较差,容易造成人手的二次伤害且不易携带。
近年来,随着软体机器人和软材料科学等领域的快速发展,手功能康复训练机器人逐渐从刚性结构转变为柔性结构。软体康复训练机器人常由硅橡胶[1,7-10]、电介质弹性体(dielectric elastomer,DE)[11]、电活性聚合物(electroactive polymer,EAP)[12]、形状记忆合金(shape memory alloy,SMA)[13]等柔性材料制成,集成到手套中实现可穿戴和便携性。硅橡胶执行器因制备简单、成本低而被广泛采用。
硅橡胶制成的软体手功能康复机器人常采用气动网络型[1,10]和纤维增强型[7-9]两类结构。气动网络结构最早用于康复手套,由哈佛大学POLYGERINOS等[1]提出,利用充气时上下层结构的不同伸长率产生弯曲来驱动手指运动,但执行器整体只能产生曲率一致的弯曲。随后,POLYGERINOS等[7-8]又提出了纤维增强结构,并利用纤维增强原理设计了软体康复手套,解决了整体式弯曲结构与人手贴合性不好的问题。以气动网络和纤维增强两种结构为原型,软体康复手套又被设计为仿鱼骨结构[9]和分段式结构[10]等,实现了更高的灵活性。国内外文献中所提到的大多数软体机器人[1,7,9-13]只能驱动手指做简单的屈伸运动,实现握拳或抓取的运动。生活中常有如捏取等动作,这类动作只需要两根或三根手指的协作即可完成,并且人手各个关节弯曲角度不同,现有的驱动器[1-10]没有很好地区分不同关节的弯曲角度差异,大多设计为整体弯曲式的结构,导致与人手贴合性较差。手指掌关节不仅可以正向弯曲也可以反向实现小角度的运动,具有正向弯曲和反向主动伸缩的自由度[14],文献中常缺少对反向自由度的研究与描述。
本文结合分段式结构的优点设计一种带有双向弯曲模块和伸长模块的可穿戴的手部软体康复机器人。分模块对各个关节和指节进行设计,该软体机器人掌关节可以实现正反方向不同角度的弯曲,手指的各关节可以独立或耦合运动,对手指多个自由度进行训练,指节的伸长模块可以在手弯曲时伸长13.2%,能在手指弯曲时对关节部分结构的弯折作一定的长度补充,保证人手弯曲时执行器与手指生物关节更好地对齐,较好地模拟人手的运动特性,提高手部康复训练效果。通过结构上的改进及提供气压的增大,驱动力较文献[15-16]中提到的4 N有了进一步的提高。
1 功能分析及原理设计
1.1 功能分析
本设计的目标是为处于不同阶段的脑中风患者提供被动训练,通过重复的运动训练,逐渐恢复手指的运动功能,另一目标是做日常生活的辅助。设计软体驱动器结构,并集成到可穿戴软体机器人上,以手套的形式固定在每根手指上。气体作为驱动源,通过对驱动器加压提供辅助力量,使患者手指完成规定的运动[1]。为此本文开发一种能够帮助脑中风患者完成手部康复训练的可穿戴机器人。遵循人手的运动特性设计面向手功能康复训练的软体机器人具有如下功能:
(1)软体驱动器在加压时可以弯曲成近似封闭的拳头,也可以通过掌指关节的主动伸缩,实现对手掌肌肉的拉伸,各手指和各关节可以耦合或独立运动,提高手部的灵活性和力量;
(2)驱动器遵循手指的运动规律,指节具有伸长模块,并且可以提供足够大的驱动力;
(3)软体机器人穿戴部分的手套质量不超过0.5 kg[8],执行器的宽度和高度与成年人手尺寸相近[17],符合便携性要求,可以轻松地将其戴上或取下,可以在手指开闭时实现小范围的尺寸可调性,符合安全性要求。
1.2 原理设计
从形态和功能仿生的角度出发,设计能尽量时刻与人手贴合的执行器,如图1所示。为了舒适地驱动手的弯曲和伸展,分别对各个关节和指节进行设计,近指关节(proximal interphalangeal point,PIP)和远指关节(distal interphalangeal point,DIP)采用气动网络结构(图1②),掌指关节(metacarpophalangeal point,MCP)结合了快气网[1]和慢气网[18]结构,指节采用中空的增强型结构[19](图1③)。
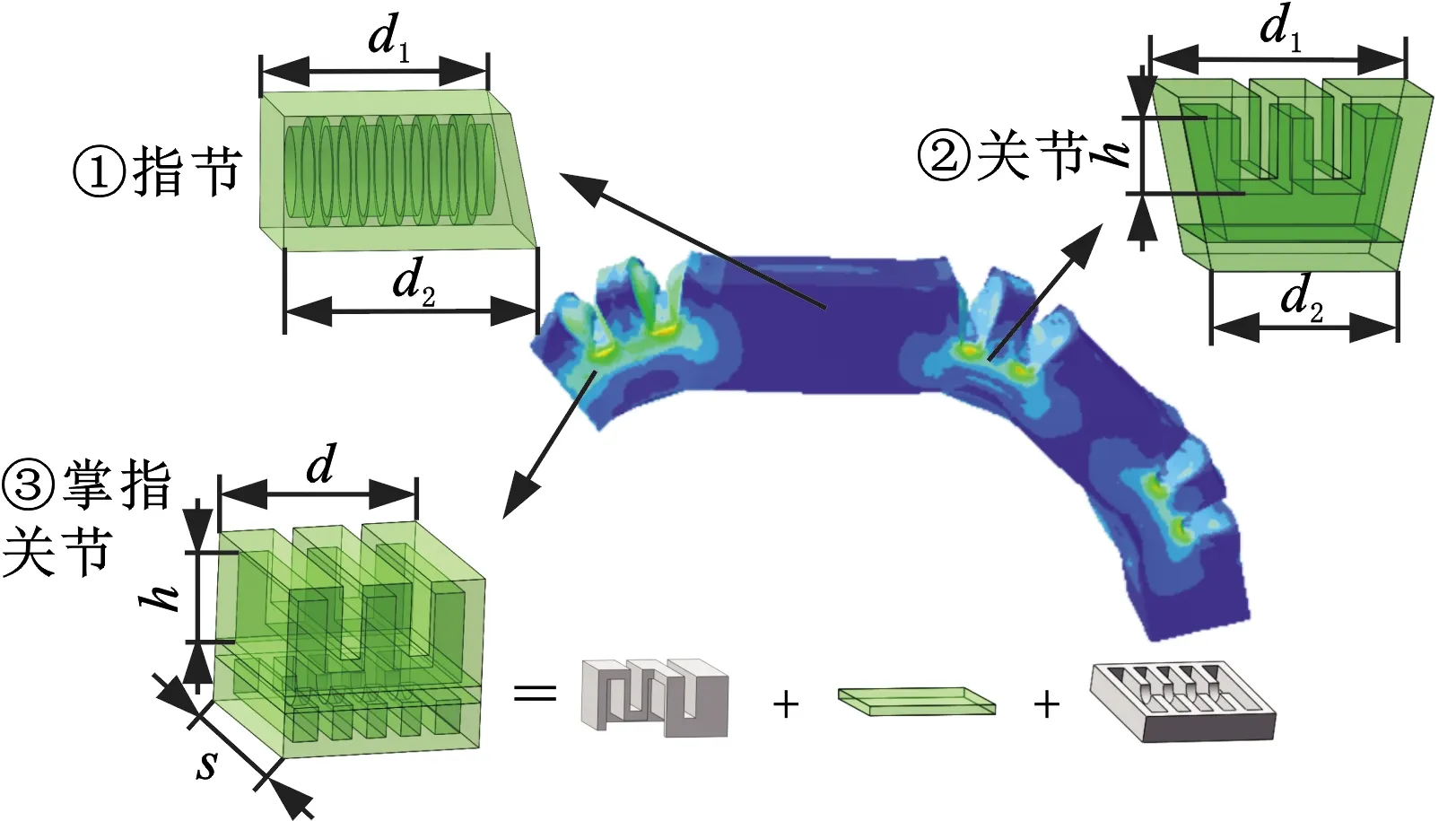
图1 软体驱动器结构
在手指弯曲或伸展时由于关节相对关系的变化,导致执行器关节与人手生物关节相对位置有所偏移,因此需要将指节模块设计为可伸长的间隔腔型结构,上下边长分别为d1、d2,如图1所示。间隔腔型结构类似于纤维增强原理,可以限制执行器的径向膨胀,保证更好的轴向伸长功能。
人手掌指关节可以完成弯曲和反向主动伸缩两个方向的运动且正反方向的运动范围不同,根据气动网络原理[1,18]设计双向弯曲的掌指关节模块,运动范围为正向0~90°,反向0~20°,上层的正向弯曲结构采用快气网(fPN)原理[1],下层的反向弯曲结构采用慢气网(sPN)原理[18],气室高度为h,模块长度为d,宽度为s,如图1所示。所设计的掌指关节可以实现给上层或下层加压相同时产生不同的弯曲角度,且各层的结构互为另一层的限制层。近指关节和远指关节设计为图1所示形状。
1.3 关节结构参数确定
根据人手生物结构和运动特性,从仿生的角度确定执行器外观结构后,再通过仿真分析评价气动网络结构各几何参数对弯曲效果的影响来确定具体参数取值。五根手指采用基本相同的结构设计,驱动器的宽s为20 mm,高h为15 mm,长度尺寸参数如表1所示。
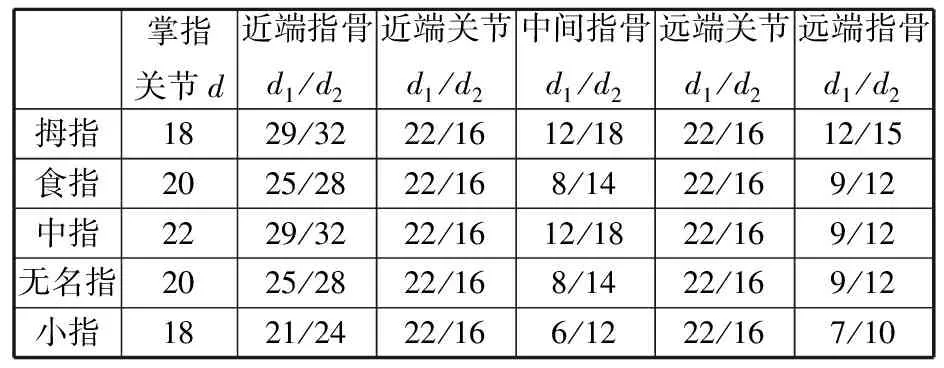
表1 指节及关节长度参数
手指各关节活动范围如下(下标m代表大拇指)[19]:-20°≤θMCP≤90°,0°≤θPIP≤110°,0°≤θDIP≤90°;0°≤θmMCP≤70°,0°≤θmPIP≤80°,0°≤θmDIP≤90°。
采用气动网络结构设计的关节的弯曲变形不仅与输入压力有关,还与结构本身的参数有关。输入相同压力时,气室的高度越大,弯曲变形越大;气室的个数越多,弯曲变形越大。手指的关节长度参数是确定的,因此可以通过改变气室高度参数来确定最佳执行器的结构。确定执行器外壁厚2 mm、内壁厚1.5 mm,长度d1=22 mm,d2=16 mm,高15 mm,宽20 mm。气室高分别设定为h=6.5,7,7.5,8,8.5 mm,利用有限元仿真得到关节在最大压力60 kPa下的弯曲角度θ,将载荷分成若干级,逐步施加到结构上,然后按照各个阶段不同的非线性性质逐步求解得到关节压力-角度模型,如图2所示。

图2 关节p-θ关系模型
根据图2所示的压力-角度模型,结合手指关节的运动范围,选择近侧指间关节气室高度h=8 mm,远侧指间关节气室高度h=7 mm。保证近侧关节弯曲角度接近110°,远侧关节弯曲角度接近90°,符合手指的运动特性。
2 软体驱动器建模、分析及制造
2.1 有限元建模
该执行器采用超弹性材料硅橡胶(M4635A)制成,超弹性材料具有不可压缩、大变形、非线性三个特性。由于硅橡胶材料在外力作用下材料特性和几何特性都呈非线性变化,所以通常采用应变能密度函数来表示其力学性能[20-22]。
对于硅橡胶这种大变形行为材料,适合用Yeoh模型模拟,Yeoh模型具有用简单的单轴拉伸试验数据描述其他变形的力学行为的能力[20-22],其应变能密度函数模型为
(1)
应变能函数为
w=C10(I-3)+C20(I-3)2
(2)
式中,J为变形后与变形前的体积比,对于不可压缩材料,J=1;I为第一应变张量不变量,为一常数;N、dk、C10、C20为材料常数。
通过硅橡胶试样的拉伸试验得到模型系数C10=0.125,C20=0.0075。本构曲线如图3所示。
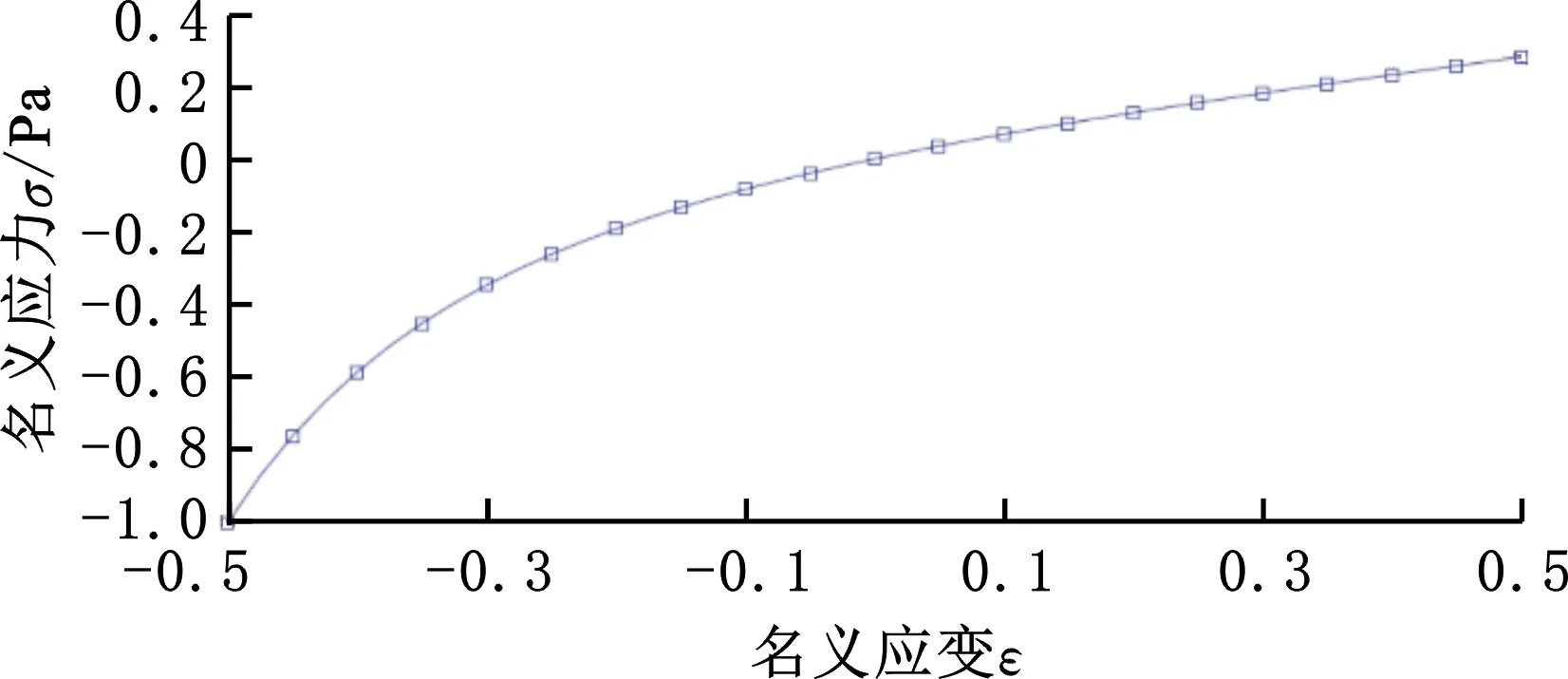
图3 Yeoh模型单轴拉伸试验曲线
基于所设计的结构,利用ABAQUS软件对手部执行器进行受力和变形分析。材料是超弹性硅橡胶,选用Yeoh模型定义执行器的材料特性,定义材料参数密度为1130 kg/m3,系数C10=0.125,C20=0.0075,对模型进行网格划分,消除重力的作用。仿真得到手指在握拳弯曲及反向主动伸缩运动时输入的压力与角度之间的关系。图4所示为单根手指在压力分别为0,11.25,19.69,30.32,40,60 kPa时的弯曲情况以及在0,50,100 kPa下反向主动伸缩手指的形态。
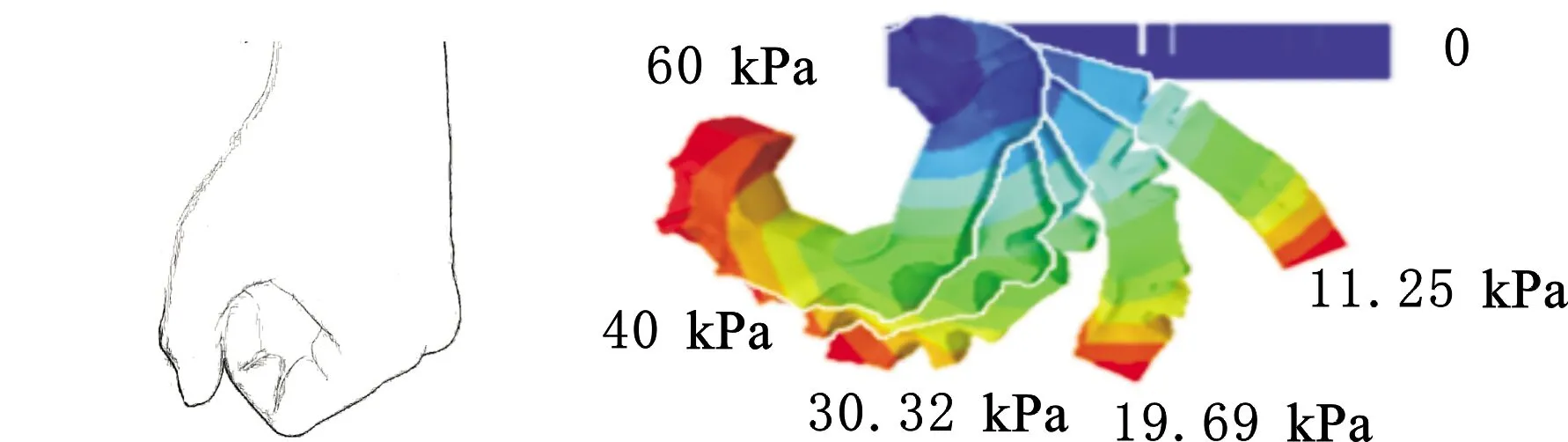
(a)人手正向弯曲图 (b)弯曲建模
由图4可知,手指在60 MPa压力下弯曲成近似多边形形状,可以完成日常生活中抓取和握拳等动作;在100 MPa下反向主动伸缩可以实现对患者手部肌肉的拉伸,促进手部功能的恢复。
2.2 软体机器人制造流程
为保证软体康复训练机器人具有灵活性和适应性,满足驱动力和弯曲角度的要求,本文融合硅橡胶及凯夫拉纤维线等多种柔性材料,采用模具设计、手指浇筑、驱动器成形、整体制作等多步工艺制造软体机器人,充分利用和发挥柔性材料的柔顺性,及其非线性、黏弹性和迟滞特性等在软体康复手运动和控制中的作用,降低控制的复杂度,实现灵活性和良好的交互性。软体机器人的制造流程如图5所示。

图5 软体机器人制造流程
手功能康复训练机器人的每根驱动器由三个关节和三段指节组成,利用模型求反的原理设计模具。为保证更多的自由度、实现对各个关节和指节的独立控制,将管路接口均设置在上方,以实现对康复机器人的单个单元控制或者多个单元协同控制。
驱动器由邵氏硬度为37HA的硅橡胶制成,加压时关节结构由于上下层不同的变形产生弯曲,指节结构会有一定程度的伸长,保证与人手指更好的贴合效果。以10∶1比例混合均匀硅胶A和B,真空脱气;采用压铸一体式的模具,恒温箱加速固化后,用原硅胶混合液粘在一起制成单根手指,指节部分外侧缠绕凯夫拉纤维线[8],绕线的间距为3.5 mm,角度为±6°,限制径向膨胀,保证伸长效果并提供足够大的驱动力。利用气管连接气动控制系统和执行器的各个气室,通过调节气压大小及管路的开闭实现对各个关节弯曲角度的控制和对各个指节伸长率的控制。
采用3D打印技术制成手掌,所设计的手掌由大手掌、小手掌和可调连接部分组成,其中可调连接部分为硅胶材料,可实现一定程度的调节以更好地适应人手。弯曲传感器固定在手掌的五根手指对应位置,浇筑五根气动手指并集成在手掌上制成康复手套,整个康复手套的质量约为400 g,符合便携性的要求,患者可以通过佩戴手套进行康复训练。
3 运动行为控制实验
3.1 实验平台
手部康复训练机器人实验平台由支架及控制系统组成。气动控制系统由压力泵、微型控制器、减压阀、节流阀、两个两位三通电磁阀、压力传感器和连接器组成。向微型控制器输入预设压力值,由微型控制器控制压力泵工作,气体通往执行器所连通的气室,使关节和指节实现弯曲或伸长。实验平台如图6所示。
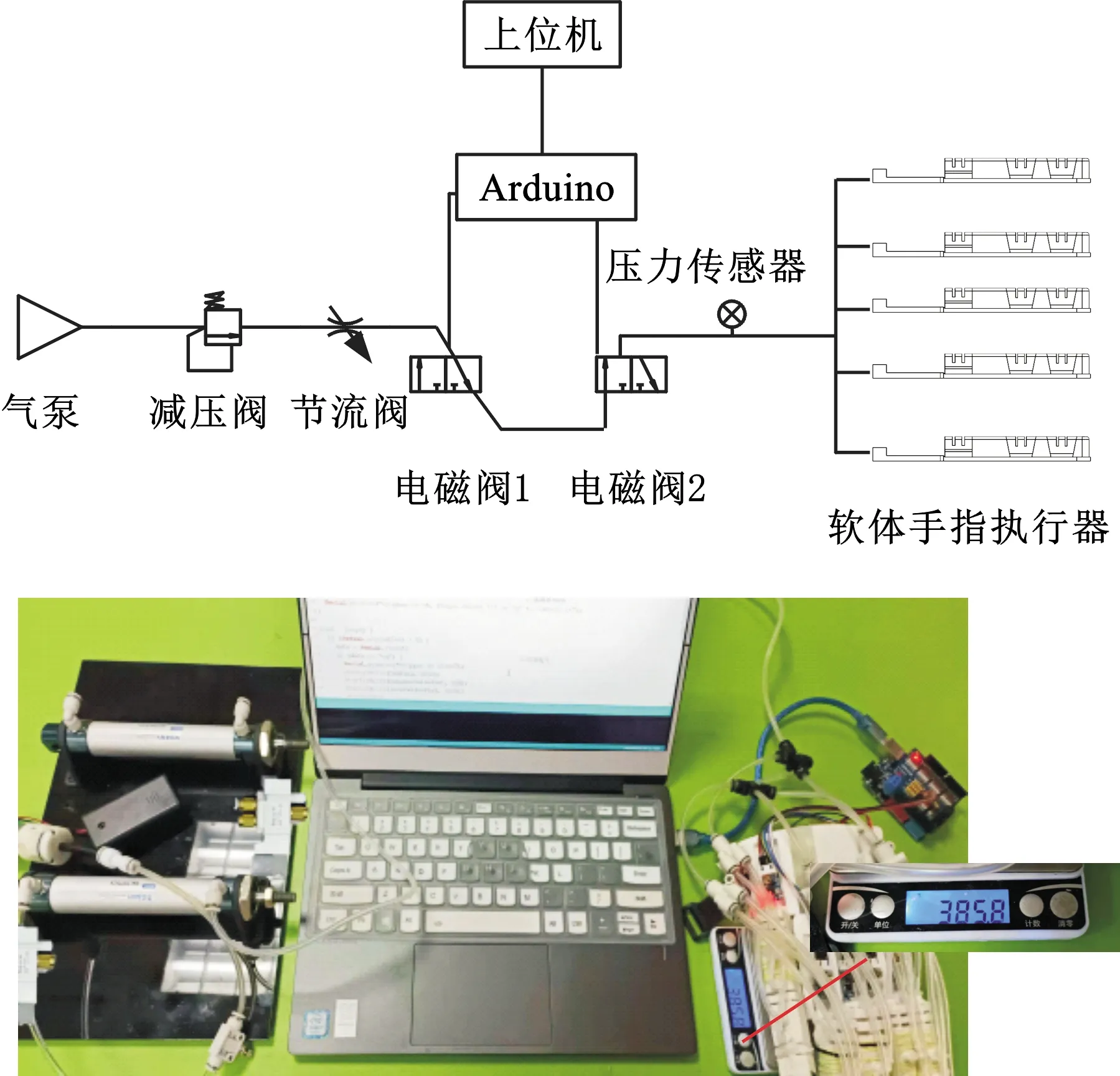
图6 实验平台
控制系统单片机处理单元采用Arduino控制整个气路,并通过安装在手掌上的弯曲角度传感器对软体康复训练机器人的弯曲特性进行角度定位及角度跟随的精确控制。驱动器由柔性材料硅橡胶制成,在内部气压变化下实现连续的弯曲变形。由于材料的非线性,在驱动器手指下侧黏附弯曲传感器来监测弯曲情况,利用电阻式角度弯曲传感器Flex Sensor4.5获取手部动作实时角度信息。对弯曲传感器进行标定,并结合气压传感器拟合气压与弯曲角度之间的关系,保证输入气压与手指弯曲角度值的准确对应,通过预先设定具体气压值来实现对各个手指弯曲运动的精确控制。
3.2 单根手指实验
对气动手指关节分别施加0,20,30,40,50,60 kPa的压力,待被测手指稳定后测量手指的变形情况,如图7所示。以掌指关节端的中心为原点(0,0),由掌指关节指向指尖的方向为X轴正方向,垂直向上的方向为Y轴正方向,对手指末端轨迹的(x,y)坐标进行跟踪,并对比有限元和实验,结果如图8所示。手指在受到气压驱动时会发生图7所示的向下弯曲,符合人手握拳时的运动特性,逐渐弯曲成类似的多边形拳头状。随着气压增大,手指末端的坐标位置变化规律为:x坐标逐渐变小,y坐标先变小后逐渐变大。实验曲线与仿真结果基本一致,均符合人手握拳时指尖相对掌关节位置的运动规律,具体坐标值如表2所示。
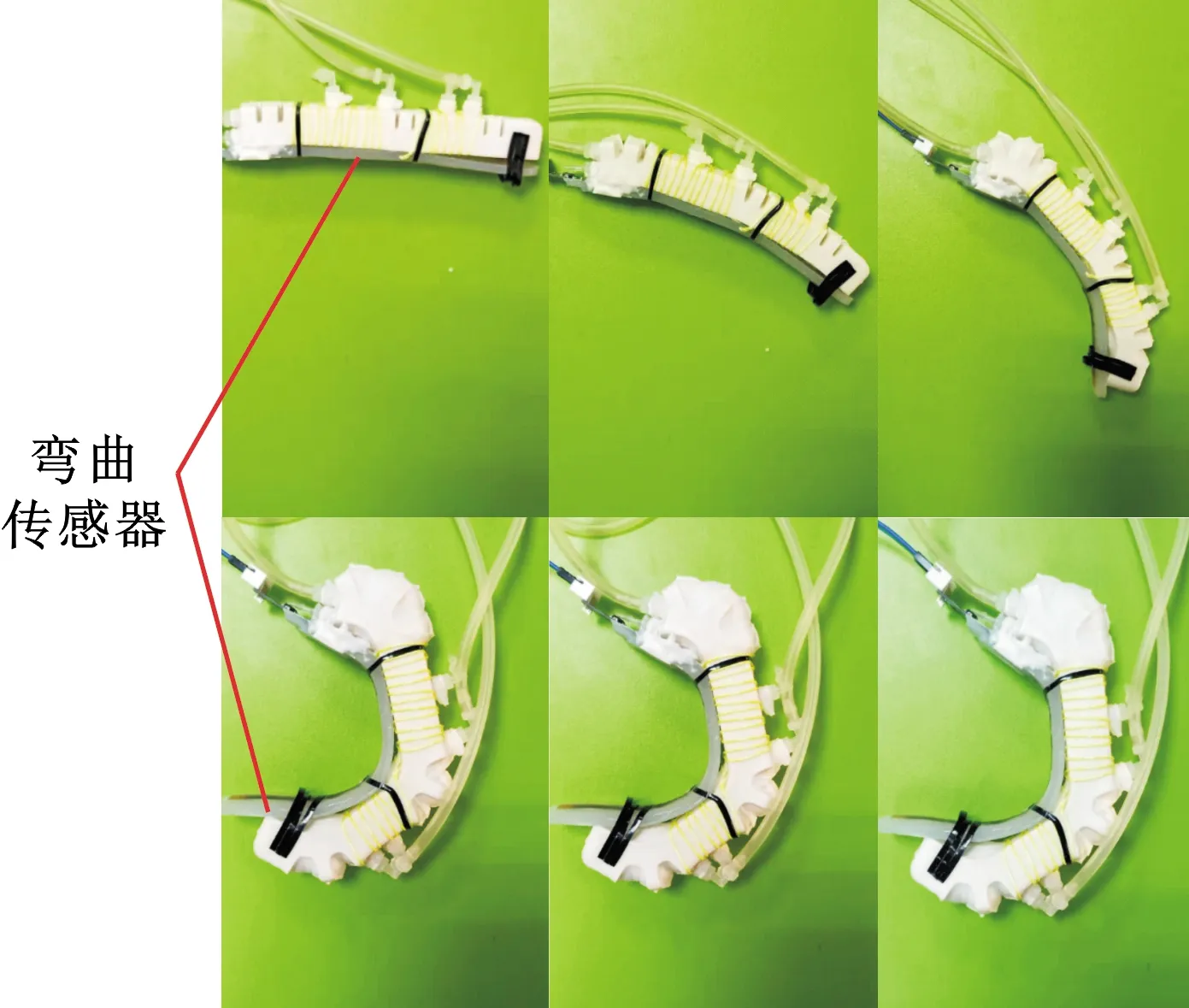
图7 单根气动手指弯曲变形

图8 指尖轨迹

表2 指尖坐标
对气动手指指节施加60 kPa的压力,指节可以伸长13.2%,保证在手弯曲时执行器与人手的生物关节对齐;掌关节具有双向弯曲模块,可以反向主动伸缩,保证对手掌肌肉的拉伸,达到康复训练效果。指节轴向伸长及掌关节反向弯曲效果如图9所示,掌关节下层的慢气网结构在施加60 kPa压力时会有反向主动伸缩效果;指节在不加压时约为38 mm,施加60 kPa压力长度约为43 mm。

图9 指节伸长及掌关节反向弯曲效果
驱动器除了要符合人手运动特性外,也要提供人手日常所需的驱动力。对驱动器施加压力,测量不同气压下指尖力的大小,测量结果如图10所示,在80 kPa下指尖力可以达到5.1 N,满足人手日常生活的需求。
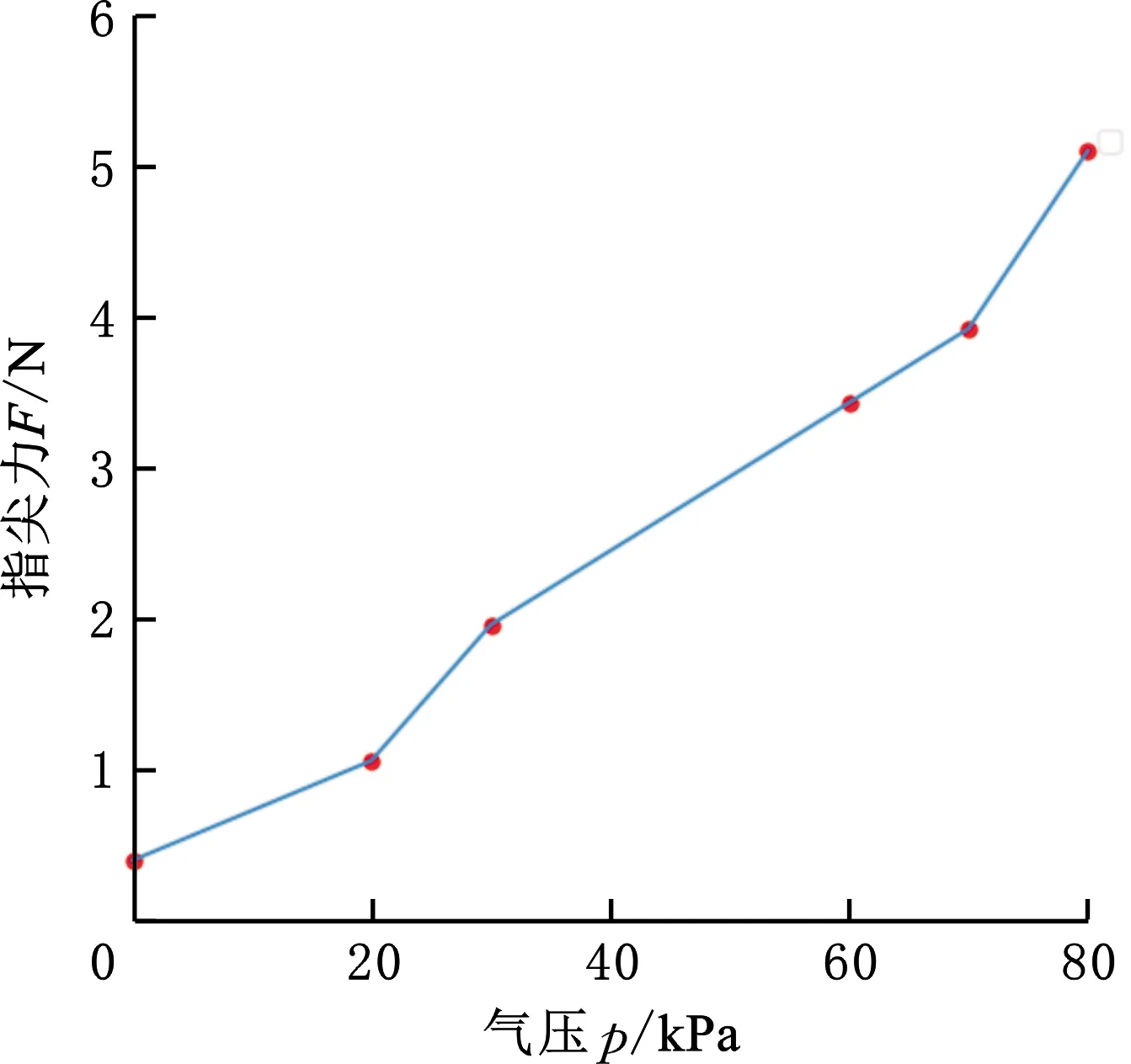
图10 指尖力结果
3.3 康复训练实验
处于不同阶段的脑中风患者手部僵硬程度有所不同,需要根据每个阶段的特点进行康复训练。早期阶段,手指较僵硬应采用抓握训练;恢复中期需要进行小范围的手指康复运动,对每个手指进行分离运动并逐步增大手指康复运动的范围;训练后期患者手指具有一定的自主伸缩能力,可以进行一些特定的手势训练提高手指的灵活性[23]。拇指与其他指尖的相对接触即对指运动需要拇指的每一个自由度和对侧手指关节的协调,对指运动可以体现康复训练后期手指运动功能的恢复[24]。为验证软体机器人的康复训练效果,进行了抓取实验、单指和对指运动实验及手势训练实验,如图11~图13所示。

图11 抓取实验

(a)单指运动

图13 手势训练实验
图11中软体康复手对圆柱形、球形和方形物体从不同角度进行抓取,并实现抓握和捏两种方式。图12完成单指运动和对指运动,图13完成两种手势运动,验证手指独立和耦合运动的灵活性。图11~图13的实验表明所设计的软体康复机器人能满足患者手指不同阶段僵硬程度的康复训练。
所设计的软体康复手符合人手运动和力的要求,加压时可近似弯曲成多边形形状,指尖力可达到5.1 N。其中掌关节可实现双向弯曲运动,对手掌内侧肌肉进行拉伸;指节可实现伸长效果,保证与人手生物关节对齐,更好地贴合人手。
4 结论
本文基于气动网络原理设计了一种分段式结构的可穿戴软体康复机器人,掌关节结合快气网和慢气网设计成双层结构,指节采用增强型结构。该装置可以实现掌指关节弯曲及主动伸缩双向运动、单个手指和多根手指的独立和耦合运动,辅助日常生活中抓、握、捏等动作,并完成特定手势动作,装置具有伸长模块,60 kPa下可伸长13.2%,保证与人手生物关节的对齐;采用多材料集成,保证执行器能提供足够大的驱动力,80 kPa下指尖力达到5.1 N;基于传感器感知信息,对执行器的弯曲特性进行角度定位及角度跟随的精确控制。运动和力的实验结果与仿真结果相近,验证了手功能康复训练软体机器人的可行性,双向弯曲模块及伸长模块的设计保证了康复训练的效果。
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
液压与气动(2022年10期)2022-11-27
陕西科技大学学报(2022年5期)2022-10-13
汽车实用技术(2022年15期)2022-08-19
上海交通大学学报(2021年2期)2021-03-02
军事文摘(2020年24期)2020-11-29
汽车维修技师(2019年2期)2019-08-23
儿童故事画报(2019年5期)2019-05-26
人生与伴侣·共同关注(2018年3期)2018-03-23
环球时报(2014-01-06)2014-01-06