通信距离受限条件下的无人机集群协同区域搜索
2022-05-07 08:26梁晓龙王玉冰侯岳奇
系统工程与电子技术 2022年5期
王 宁, 李 哲,*, 梁晓龙, 王玉冰, 侯岳奇
(1. 空军工程大学空管领航学院, 陕西 西安 710051; 2. 陕西省电子信息系统综合集成重点实验室,陕西 西安 710051; 3. 中国人民解放军95899部队, 北京 100089)
0 引 言
无人机(unmanned aerial vehicle, UAV)在现代空战中发挥着日益重要的作用,运用UAV集群执行协同搜索、跟踪、打击、评估等作战任务正日益成为UAV集群作战应用领域的研究热点。UAV集群协同搜索任务是指利用UAV机载传感器侦察任务区域,通过机间和地空通信网络共享环境感知信息,最终完成对目标的捕获任务。UAV集群协同搜索任务能够为后续干扰、跟踪、攻击、评估等行动的决策提供有效信息支撑,是集群作战的重要环节。
针对UAV集群搜索航迹规划问题,国内外已有诸多学者进行了广泛研究,主要成果大致可以分为静态规划方法与动态规划方法。在静态规划方面,主要包括Voronoi图、格雷厄姆法、Dubins路径规划等区域处理和路径规划方法。其中,文献[8]根据集群规模对任务区域进行等面积划分,通过建立人工势场实现UAV避障,有效解决了任意形状区域的任务分配和航迹规划问题。文献[9]采用凹点处凸分解的方法对非凸多边形区域进行划分,通过“Z”型路径及Dubins转弯路径模型对子区域内覆盖搜索路径进行规划,建立了区域划分与路径规划的整体调用框架,实现了任务区域的快速划分和子区域内搜索路径的快速生成。文献[10]根据UAV性能及环境区域宽度进行任务区域划分,以UAV总转弯次数最少为目标函数进行子区域内的UAV路径规划,实现了UAV集群覆盖搜索路径的规划。上述工作运用分治思想,首先对任务区域进行分割,进而确定子区域内的UAV个体最优搜索航迹,有效解决了静态战场环境中UAV集群协同效率低的问题,但难以应对动态战场环境中UAV被击毁、故障等突发情况,具有一定的局限性。
针对动态战场环境中的协同搜索问题,目前公开的研究成果主要包括信息素地图、目标概率地图等地图构建方法与分布式模型预测控制(distributed model predictive control, DMPC)、滚动时域优化(receding horizon optimization, RHO)等优化求解方法。其中,文献[11]通过定制环境更新算子,实现了不规则任务区域中的协同搜索。文献[19]基于信息素地图对环境进行描述,建立了不同场景下的搜索回报函数,采用DMPC方法进行决策求解,有效完成了UAV集群的多任务协同。文献[20]基于不确定性地图和信息素地图对环境进行描述,建立了含目标运动模型的搜索回报函数,通过改进鸽群算法完成了对运动目标的集群协同搜索。文献[21]建立了包含4种动目标运动模型的环境概率地图,通过改进蚁群算法实现了UAV的实时动态决策。文献[22]提出了一种带障碍约束的离散最优航迹节点求解算法,通过建立分辨率可变的环境地图,提供了一种适用于不同运算性能条件下的UAV动态路径规划方法。文献[3]基于目标概率地图和环境不确定地图对环境进行描述,建立了基于环境不确定图更新的回访机制,实现了UAV集群对动目标的回访搜索。
上述研究使UAV集群在动态战场环境中具备了一定程度的协同搜索能力,但仍存在以下不足:
(1) 对集群协同搜索过程中的通信距离影响未予以考虑;
(2) 以覆盖率作为衡量搜索效率的唯一指标,未同时考虑覆盖搜索任务中对动目标的搜索需求;
(3) 未考虑集群规模对协同搜索效率的影响。
针对上述问题,本文做了以下工作:
(1) 依据有效通信距离定义了协同搜索任务中3种典型通信场景,并设计了相应的协同机制;
(2) 考虑协同搜索任务中对动目标的搜索需求,引入了包含动目标位置分布先验信息的目标概率图,兼顾了覆盖搜索任务中的动目标搜索效率;
(3) 给出了通信距离受限条件下集群规模对协同搜索效率影响的定性分析。
1 环境认知地图模型
1.1 环境不确定图
运用几何图方法对任务区域进行栅格化,并为每个栅格赋予能够描述环境不确定度的数值,在UAV集群搜索过程中对环境不确定度进行持续更新,如图1所示。
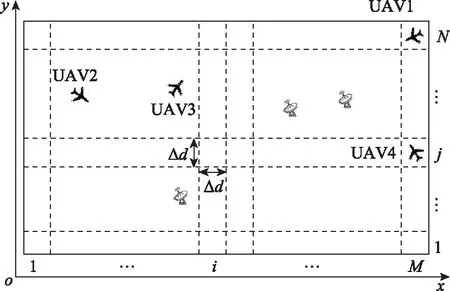
图1 任务区域栅格化Fig.1 Task area rasterization
用(,,)表示时刻栅格(,)的不确定度。(,,)=1表示时刻UAV对该栅格完全不了解;(,,)=0表示时刻UAV对该栅格已完全了解。(,,)的动态取值与栅格(,)被搜索的次数有关,根据任务先验信息对环境不确定度进行初始化,定义其更新方式为
(,,+1)=(1-)·(,,)
(1)
式中:∈(0,1]为衰减因子,表示相应栅格经一次搜索后不确定度的消减量,当=1时,表示相应栅格中的静态信息经一次搜索即可完全获取;为时刻栅格(,)被搜索的累积架次且满足∈。
1.2 目标概率图

(,,0)=

(2)
式中:表示正态分布的离散程度;表示预估目标存在位置的概率峰值,即先验信息的可信度。
随着搜索任务的不断进行,UAV对环境信息持续更新,考虑到UAV传感器对目标的判别水平,定义环境中的目标存在概率更新公式为

(3)
式中:为UAV传感器对目标的探测概率;为传感器对目标的虚警概率,二者共同反映了UAV传感器针对特定目标的探测性能;(,,)∈{0,1}为时刻栅格(,)的实际情况,(,,)=1表示时刻栅格(,)存在目标,(,,)=0表示时刻栅格(,)不存在目标。
1.3 环境信息素图
自然界中存在着广泛的生物集群协同行为,其中蚂蚁等动物能够通过分泌信息素实现集群运动过程中的信息传递与行为协同。为实现UAV在长时间搜索过程中对已搜索区域的有效回访,本文定义了与任务时间相关联的吸引信息素,用于引导UAV回访相关区域,及时跟进战场态势。
定义时刻栅格(,)处的信息素浓度为(,,),0时刻所有栅格都无需回访,从而有(,,0)=0。定义栅格(,)的信息素浓度更新公式为
(,+1)=(1-)· [(1-)((,,)+1+1-(,)(,,+1))]
(4)
式中:表示信息素的挥发系数;表示吸引信息素的传播系数;∈(0,1)为调节因子;(,,)为栅格(,)在时刻释放的信息素值;(,)为栅格(,)上次被访问的时间。
2 UAV运动模型
2.1 状态空间模型
假设UAV集群能够保持在同一高度飞行,则UAV运动模型可以近似为二维空间中以一定速度和方向运动的质点。
设UAV集群为集合{|=1,2,…,},记在时刻的状态向量为
(5)

2.2 UAV运动模型及决策集
为简化协同搜索决策的解空间,以偏航角改变量()作为时刻的决策输入,仅考虑UAV的平动运动。假设UAV只能向当前栅格的临近栅格移动,UAV在每个时刻有8种可飞方向,如图2所示。决策集为
()∈{0,1,2,3,4,5,6,7}
(6)
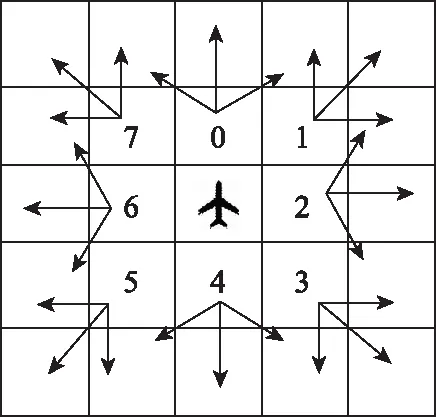
图2 UAV飞行决策集Fig.2 UAV flight decision set
则+1时刻的飞行方向为
(7)
式中:mod(·)表示取模运算。
3 协同信息产生与交互机制
3.1 搜索回报函数
以最大化UAV集群搜索效率为性能指标,建立包含以下内容的搜索回报函数。
(1) 环境搜索收益
环境搜索收益是指UAV集群搜索过程中环境信息不确定度下降的度量,用于引导UAV集群完成对地静目标的搜索。借鉴采用信息熵描述信息不确定度的方法,根据先验信息初始化0时刻的环境不确定地图为
(,,0)=-(,,0)log(,,0)
(8)
式中:(,,0)为静目标分布的先验信息。在UAV协同搜索过程中,环境不确定度随着UAV对环境感知范围不断增加而下降。因此,定义栅格(,)和整个区域的搜索环境增益公式如下:
(,,)=-(,,)+(,,-1)=(,,)·[1-(1-)]
(9)
(10)
式中:∈(0,1]为环境不确定度衰减因子,一般取1,表示UAV集群对相应栅格进行一次搜索即可确定该栅格静目标分布情况。
(2) 目标存在概率收益
目标存在概率收益是指UAV完成对动目标搜索过程中所获取的概率收益,用于引导UAV在搜索过程中选择目标存在概率高的区域,采用UAV搜索过程中能够探测到的目标存在概率之和衡量目标存在概率收益,即

(11)
式中:(,,)表示时刻UAV对栅格(,)处是否存在目标的判别结果,(,,)=1表示时刻栅格(,)中存在目标,(,,)=0表示时刻栅格(,)中不存在目标,有:
(12)
式中:∈[05,1]为目标存在概率阈值。
(3) 信息素收益
信息素收益是指UAV搜索过程中,对于长时间没有关注的区域进行搜索时所获得的收益,该收益随搜索间隔的增加以指数形式增长。用于引导UAV关注搜索时间间隔较长的区域:
()=·(,,)
(13)
式中:∈(1,15]为平衡因子,表示随着任务时间的增加,环境不确定度下降的同时,UAV更加关注对长时间未回访的栅格的搜索。
3.2 协同信息产生方法
文献[14]早在2001年提出了基于认知地图的UAV协同搜索框架,其主要内容如下。
(1) UAV集群共用一个认知地图,根据自身传感器的信息动态更新认知地图。
(2) 集群成员根据认知地图及其他信息,在合理的搜索策略指导下,在线决策UAV的飞行路径。
这种协同搜索框架为协同搜索路径规划问题提供了有效思路,在此框架下已有不少研究成果。但这种框架并未对集群协同搜索过程中的通信问题予以充分考虑,具有一定的局限性。
针对通信距离受限的战场环境,对上述框架进行改进,改进后的搜索框架主要包含以下内容:
(1) UAV集群中每个成员在初始时刻携带一个认知地图,在搜索过程中根据传感器信息实时更新自身认知地图,并产生预决策信息。
(2) 当UAV之间的距离满足通信条件时,UAV通过信息交互机制将自身认知地图与其他成员的认知地图进行融合,获取其他成员的预决策信息,在此基础上进一步决策产生输入控制量。
(3) 当UAV之间的距离不满足通信条件时,UAV将预决策信息作为自身决策信息进行动态航迹规划。
在搜索回报函数的引导下,UAV集群中每个成员首先根据当前自身环境认知地图进行预决策,其次根据预决策结果更新环境认知地图,即产生预测环境认知地图,然后将预测环境认知地图与集群其他成员进行交互融合,最后在完成信息交互的基础上决策,实现动态航迹规划。
集群中每架UAV根据搜索回报函数进行预决策,此时引导UAV进行预决策的搜索回报函数为
=·()+·()+·()
(14)


(15)

3.3 信息交互机制
面向不同通信干扰强度下的战场环境,本节依据机间有效通信距离,首先给出3种典型通信场景的定义,进而提出相应的UAV集群信息交互机制,分述如下。
给出时刻表征UAV集群内通信连通性的二值邻接矩阵():
(16)
式中:()代表集群成员与之间的通信连通性,若时刻与之间可以进行有效通信,则()为1,否则为0。令:
(17)
若
(18)
则表示时刻UAV集群机间通信拓扑为全连通状态,即通信完全有效。若

(19)
则表示时刻UAV集群机间通信拓扑为部分连通状态,即通信部分有效。若
()=0
(20)
则表示时刻UAV集群机间通信拓扑为无连通状态,即通信完全失效。
进而给出3种场景下的信息交互方法如下。
(1) 通信完全有效
当UAV集群通信完全有效时,集群中任意成员可与其他所有成员实现通信,此时集群中各成员之间的信息交互方式如图3所示,相当于每名成员均可视为中央节点,能够有效获取集群中所有其他成员的预测环境认知地图。
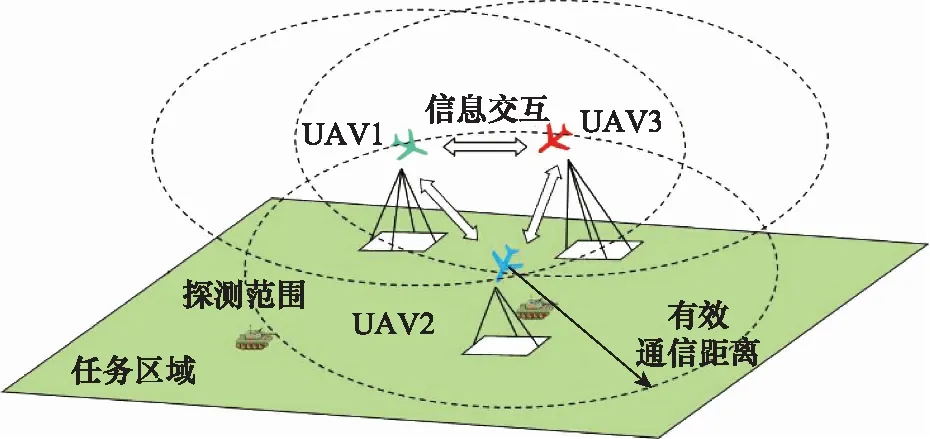
图3 通信完全有效时的信息交互Fig.3 Information interaction under completely valid communication conditions
在获取集群中其他成员预测环境认知地图后,通过环境认知地图融合运算,可以得到包含环境不确定图()、目标概率图()和环境信息素图()的决策环境认知地图,进而完成自身航迹决策。决策环境认知地图可根据集群其他成员的预测环境认知地图得出:

(21)

(22)

(23)
(2) 通信局部有效
当UAV集群通信局部有效时,集群中任意成员可与部分其他成员实现通信,此时集群中各成员之间的信息交互方式如图4所示。

图4 通信部分有效时的信息交互Fig.4 Information interaction under partly valid communication conditions
对于集群中任意成员,当集群中有其他成员位于通信范围内时,定义两者环境认知地图的信息交互方法如下:
(24)

(25)

(26)
时刻能够与保持通信的UAV成员满足如下条件:
∈{|=1,=1,2,…,,≠}
(27)
(3) 通信完全失效
当UAV集群通信完全失效时,集群中任意成员无法与其他成员进行通信,此时集群中各成员之间不进行信息交互,将自身预决策量作为控制输入的决策量完成搜索航迹规划,并更新自身环境认知地图,如图5所示。
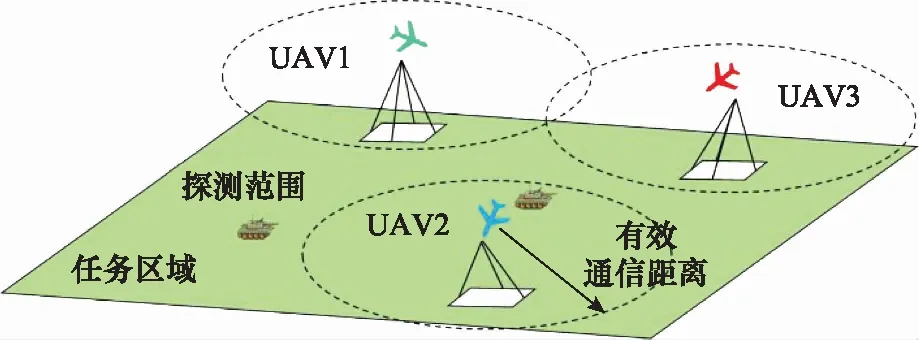
图5 通信完全失效时的信息交互Fig.5 Information interaction under the condition of complete communication failure
此外,防相撞是UAV集群执行搜索任务过程中不容忽视的重要问题,文献[24-25]基于人工势场法,通过构建UAV势场实现了集群协同搜索过程中的机间防相撞,借鉴这一思想,本文提出了信息交互机制下的防相撞措施。首先给出如下合理假设。
强对抗环境中的UAV机间有效通信距离仍大于其 机间安全距离。
UAV机间通信延迟所带来的飞行距离可忽略不计。
此时将搜索回报函数增加以下内容:

(28)
式中:为时刻位于通信范围内的UAV集合,有:
={|()=1,≠}
(29)
进一步得出实际决策的搜索回报函数为
()=·()+·()+·()+·()
(30)
4 滚动时域优化决策方法
借鉴模型预测控制理论中的滚动时域决策方法,在UAV集群完成信息交互后获得决策环境认知地图的基础上,根据系统状态空间模型、决策集和决策搜索回报函数,本文进一步建立了UAV集群协同搜索滚动时域优化求解模型,具体表述如下。


(31)

(32)
综上,交互决策机制驱动的协同搜索方案(interactive decision-making mechanism driven cooperative search planning, IDMD-CSP)算法流程如图6所示。

图6 IDMD-CSP算法流程Fig.6 Process of IDMD-CSP algorithm
5 仿真实验
本节面向典型的通信受限条件下的不同协同搜索任务想定,开展数值仿真研究。首先,对同时包含动目标和静目标环境中的协同搜索航迹规划进行仿真,在验证本文算法有效性的基础上对提出的3种属性的认知地图在协同搜索任务中的作用进行分析。其次,分别对不同通信距离和集群规模条件下的UAV集群协同搜索任务效能进行仿真,验证了本文算法对复杂任务环境的适应性。然后,对通信中断条件下的UAV协同搜索航迹进行仿真,验证了本文算法在通信中断环境中的鲁棒性以及通过信息交互提高集群搜索效能的有效性。最后,与当前主流协同搜索算法对比,验证了引入目标概率图及动目标分布先验信息后对动目标搜索效能提高的有效性。仿真硬件环境为Inter Core i5-9 300HQ 2.5 GHz。
仿真任务区域为40 km×30 km的矩形区域,将任务区域划分为40×30的正四边形网络,将每个面积为1 km×1 km的栅格映射到环境认知矩阵中。假定任务区域中分布有12个动目标,根据先验信息可以获取坐标依次为(5,5),(20,25),(30,20),(25,15),(5,10),(15,18),(10,15),(36,23),(20,18),(25,25),(34,20),(28,10),其他各参数设置如表1~表4所示,初始目标概率分布地图与环境信息素地图分别如图7和图8所示。设定总仿真时间为6 000 s,将仿真时间离散为间隔为10 s的600个规划步,同时设定决策的滚动优化步长为30 s。

表1 UAV初始状态信息与性能约束

表2 传感器性能参数

表3 环境认知地图参数

表4 IDMD-CSP算法参数
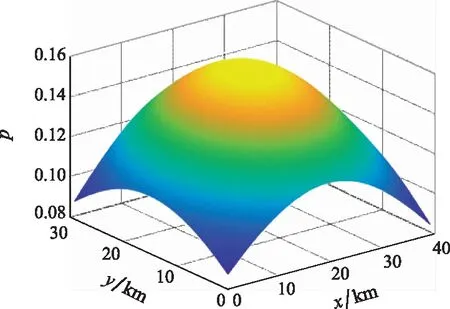
图7 目标概率初始分布Fig.7 Initial distribution of target probabilities

图8 环境不确定性地图初始分布Fig.8 Initial distribution of environmental uncertainty maps
5.1 协同搜索规划结果
针对通信距离受限条件下的UAV集群协同搜索任务,分别以覆盖率和动目标捕获个数作为对静目标和动目标搜索效能的评价指标,仿真结果如图9~图11所示,分别为=1 200 s、=3 600 s、=6 000 s时的UAV集群协同搜索航迹规划结果。从图9(a)可以看出,初始时刻位于(15,18)km、(20,18)km栅格处的目标被捕获,此外发现在(30,20)km、(28,10)km处存在目标的概率较大,说明在UAV完成覆盖搜索时,通过引入目标先验位置信息,能够引导UAV首先对动目标存在概率高的区域展开搜索,提高了对搜索任务中对动目标的发现概率。从图9(c)和图10(c)可以看出,UAV集群快速对任务区域进行覆盖式搜索,有效获取环境中的静目标信息,说明不确定性图能够有效引导UAV集群完成覆盖式搜索。从图9(d)可以看出,当UAV1和UAV3分别第一次发现位于(15,18)km和(20,18)km栅格处的目标后,通过信息交互引导其他UAV来此栅格附近进行搜索,进而确认目标位置,说明UAV集群中各UAV之间可以通过信息交互机制提高对动目标的发现概率。从图9(b)、图10(b)和图11(b)可以看出,随着搜索时间的增加,环境栅格中的信息素含量不断增加,引导UAV对搜索间隔较长的区域进行回访搜索。同时,从图10(c)和图11(c)可以看出,当UAV集群通过覆盖式搜索确认静目标信息后,不确定性地图在集群协同搜索决策中的比重下降,更加注重对可能存在动目标的区域的回访搜索。仿真结果表明,本文所提UAV集群协同搜索方法在引导UAV集群完成对任务区域覆盖式搜索的基础上,通过引入动目标分布先验信息和建立UAV集群信息交互机制,能够有效兼顾对动目标的搜索需求及长时间搜索任务中的回访需求。
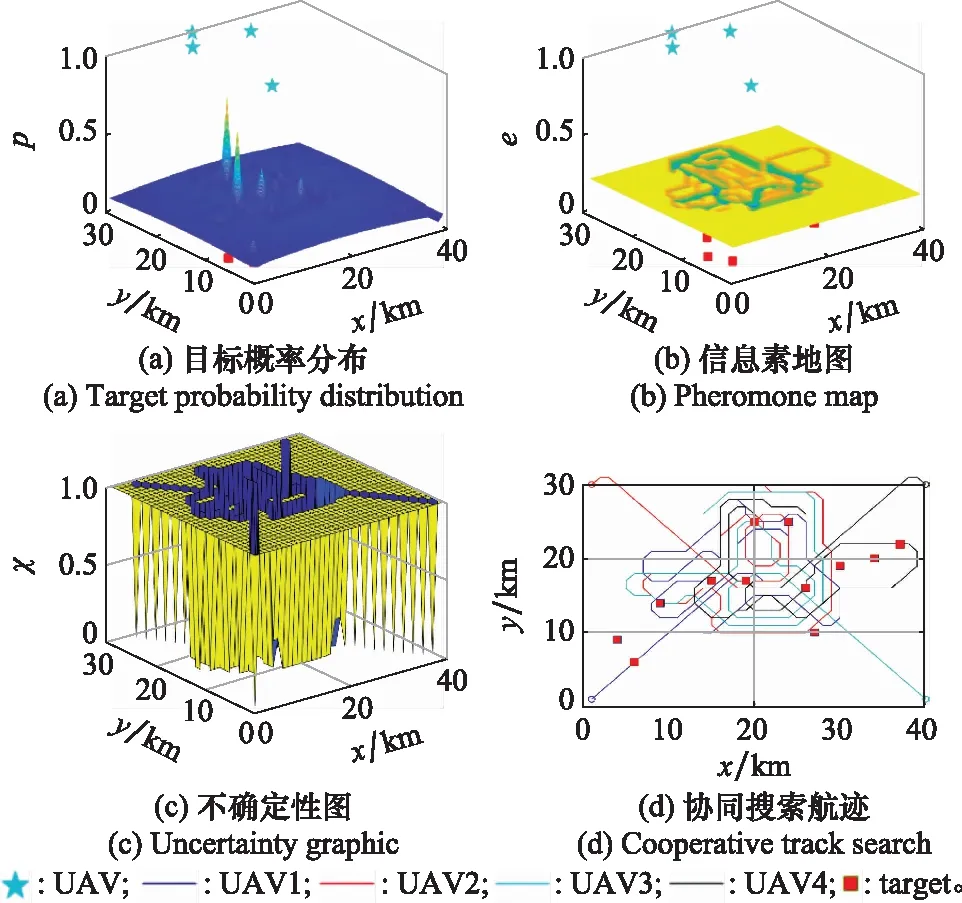
图9 搜索规划结果(t=1 200 s)Fig.9 Search planning results (t=1 200 s)
图10 搜索规划结果(t=3 600 s)Fig.10 Search planning results (t=3 600 s)
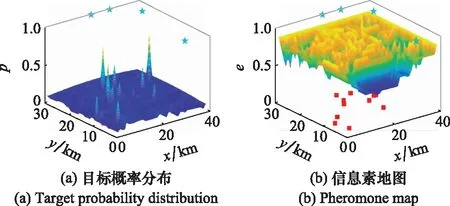
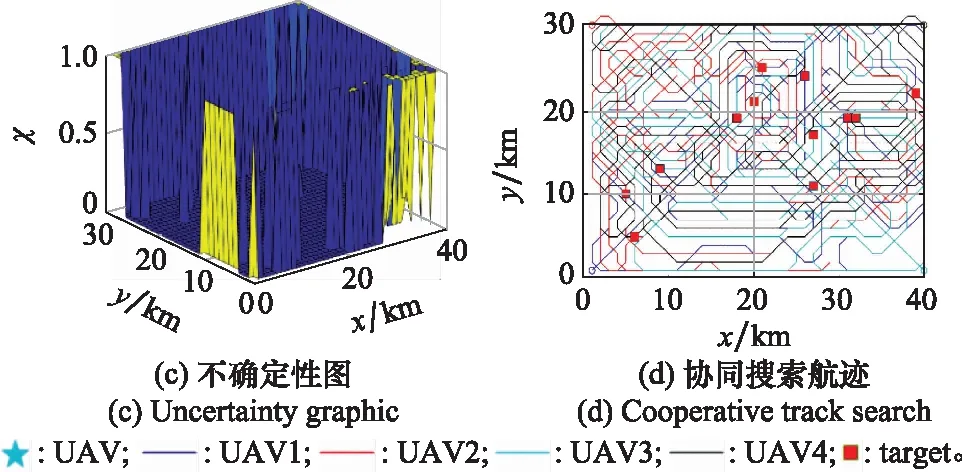
图11 搜索规划结果(t=6 000 s)Fig.11 Search planning results (t=6 000 s)
5.2 通信距离对搜索效率的影响
在完成UAV集群协同搜索航迹规划仿真的基础上,采用控制变量法对不同通信距离下的搜索效率进行分析。设定仿真时间为1 200 s,动目标数量为12个,在未知目标分布先验信息的情况下,设定每个目标的信息需由至少3架UAV捕获才可完全获取。采用6架UAV进行协同搜索,以0.5 km为通信距离步长进行50次蒙特卡罗仿真,仿真结果如图12所示。
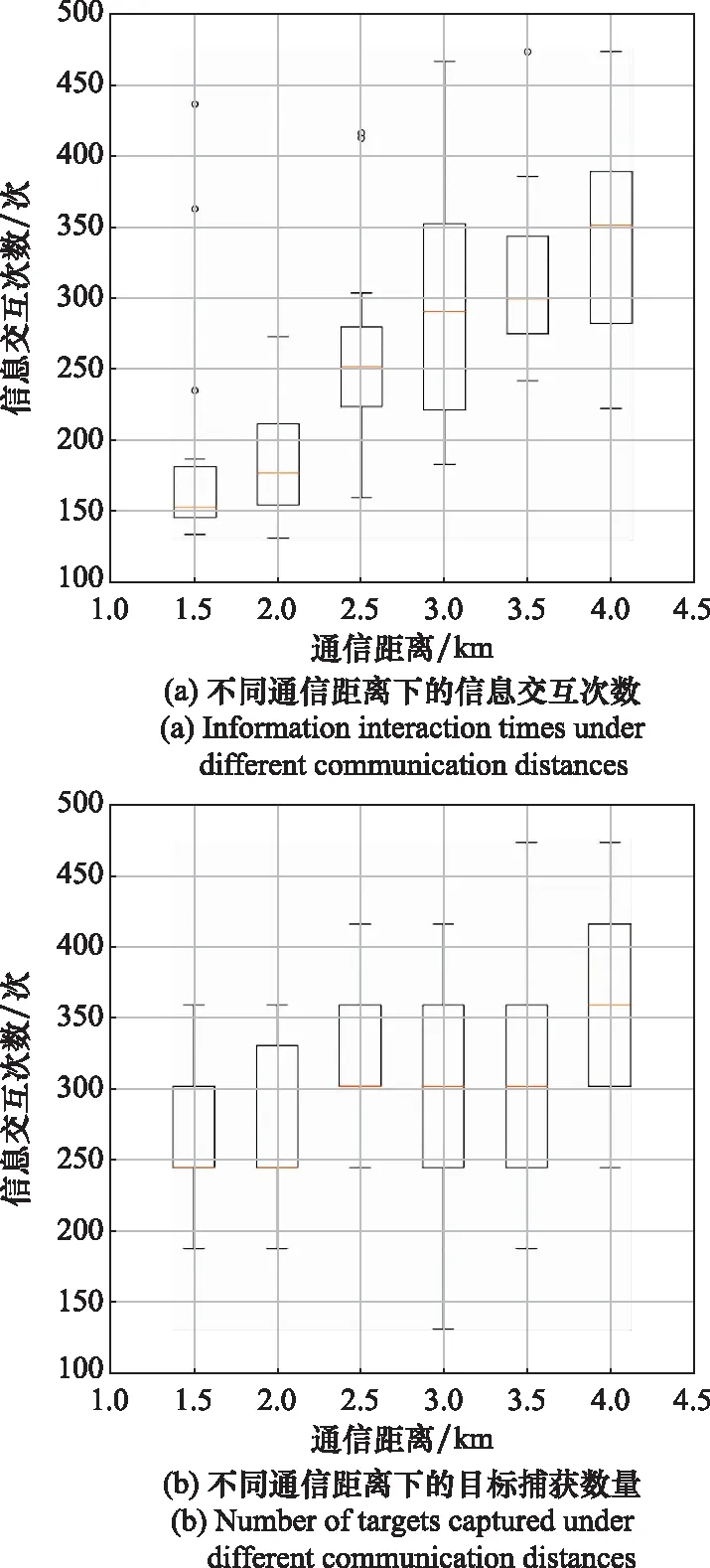
图12 通信距离对搜索效率的影响Fig.12 Effect of communication distance on search efficiency
由仿真结果可知,在机间有效通信距离的增加后,UAV集群协同搜索过程中的信息交互次数随之增加,搜索效率随之提高。然而,当通信距离超过2.5 km后,信息交互次数的增加并不能带来捕获目标的有效增长。因此,在强对抗环境中,UAV集群一般存在最小机间通信距离可以保证协同搜索任务中保持较高的搜索效率,在实际应用时可以通过仿真初步确定UAV集群应保证的通信功率。
5.3 集群规模对搜索效率的影响
在分析通信距离对集群协同搜索效能影响的基础上,对不同规模的UAV集群对任务区域的搜索效率进行仿真分析。UAV集群规模分别为4架、8架、12架和16架,设定机间有效通信距离均为2.5 km,针对每种规模的UAV集群分别进行50次蒙特卡罗仿真,仿真时间为1 200 s,仿真结果如图13所示。

图13 集群规模对搜索效率的影响Fig.13 Effect of swarm size on search efficiency
由仿真结果可知,当UAV数量小于8架时,随着UAV数量的增加,捕获目标数量、目标探测次数及信息交互次数会明显增加,即UAV集群协同搜索效率有明显提升。当UAV数量超过8架之后,尽管UAV之间的信息交互次数明显增加,但目标探测次数、目标捕获次数并不明显提升,说明在任务区域及目标数量一定的条件下,UAV数量的持续增加并不能一直带来搜索效率的迅速提升,需要根据任务的具体情况确定UAV集群的规模。
5.4 通信中断对搜索效率的影响
为分析本文方法在通信中断条件下的有效性,分别以区域覆盖率和目标捕获数量作为评价指标,对静目标和动目标的搜索效率进行综合评估。设定仿真总时间为6 000 s,将仿真时间离散为间隔为10 s的600个规划步,设定搜索任务进行至2 000 s时出现通信受干扰中断,进行至3 200 s时通信恢复正常,仿真结果如图14和图15所示。
图14 通信中断条件下的覆盖率Fig.14 Coverage under communication interruption
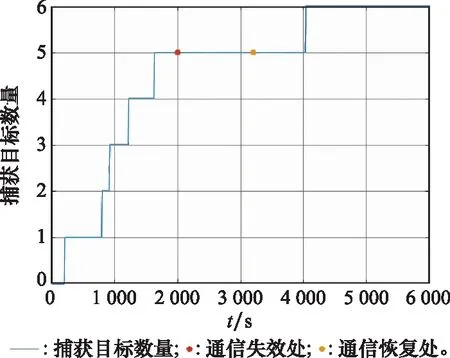
图15 通信中断条件下捕获的目标数量Fig.15 Number of captured targets under communication interruption
由仿真结果可知,对于静目标搜索,在仿真时间2 000 s处通信中断后,UAV集群中所有成员依据自身环境认知地图进行决策,区域覆盖率增速放缓,这是由于UAV之间失去信息交互,造成了对静目标的重复搜索。在仿真时间3 200 s通信恢复后,区域覆盖率增速加快,这是由于各UAV之间通过信息交互机制避免了对静目标的重复搜索,提高了覆盖搜索效率。
对于动目标搜索,在2 000 s处通信中断后,UAV之间失去信息交互,发现目标的UAV无法引导其他UAV再次确认目标,导致难以捕获目标。在3 200 s通信恢复后,UAV可通过信息交互引导其他UAV对目标存在概率高的区域再次确认,进而完成对动目标的捕获。
5.5 与其他方法的性能对比
本节分别采用光栅式、文献[17]以及本文方法对想定任务区域展开搜索,进一步验证本文算法对动目标捕获的有效性。设定集群规模为8架,机间有效通信距离为2.5 km。采用蒙特卡罗方法进行50次仿真验证,仿真时长为6 000 s,通过环境覆盖率与捕获目标数量对方法的有效性进行评估,仿真结果如图16所示,3种方法的平均覆盖率分别为85.84%,83.40%,86.10%,平均捕获目标数量分别为0.24,0.425,6.04,本文方法对于静态目标和动态目标的搜索捕获效率均高于其他两种方法。
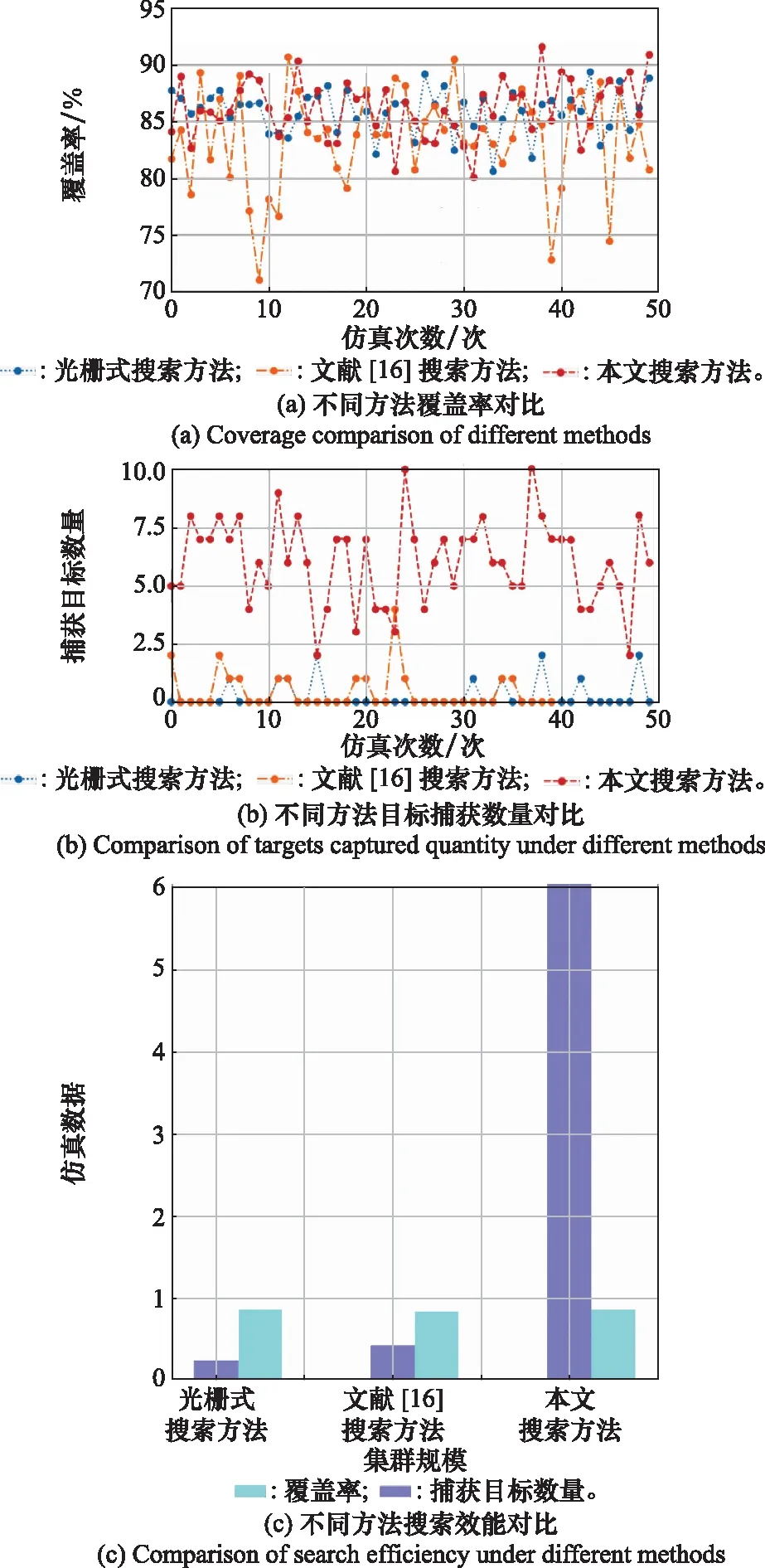
图16 与其他方法性能对比Fig.16 Performance comparison with other methods
从仿真结果可以看出,光栅式搜索方法受限于UAV初始位置分布,未能充分发挥对静态目标的搜索优势,在缺少回访机制引导的条件下,光栅式搜索方法无法再次对目标进行确认搜索,因此对运动目标的搜索效果并不理想,具有一定的局限性。文献[17]所提出的动态规划搜索方法在一定程度上提高了对动目标的搜索性能,但并未有效利用先验信息,因此在有限时间内其捕获目标数量低于本文方法。本文方法能够根据先验信息引导UAV首先对目标存在概率较高的区域进行搜索,在搜索初期注重对静态目标信息的获取,随着搜索任务的进行,更加注重对相关栅格的回访,提高对运动目标的捕获概率;通过信息交互机制,有效完成了集群成员环境认知信息的共享,提高了UAV集群协同搜索效能,具有更好的鲁棒性与实用性。
6 结 论
为提高通信受限条件下UAV集群执行协同搜索任务过程时对先验信息的利用效率,本文设计了包含3种属性的环境认知地图,基于不确定性地图引导UAV集群对任务区域中的静目标进行搜索,基于目标概率地图引导UAV对动目标存在概率高的区域进行搜索,基于信息素地图引导UAV在长时间搜索任务中实现回访搜索,并通过设计不同通信场景下的信息交互机制提高UAV集群在搜索任务中的协同能力,通过数值仿真试验,得出如下结论。
(1) 算法设计了不同通信距离约束下的UAV集群信息交互机制,在UAV集群搜索任务中,实现了通信距离受限条件下的协同航迹规划。
(2) 通过引入环境不确定图和目标概率图,提供了UAV集群覆盖搜索过程中兼顾动目标搜索的能力。通过建立信息交互机制,体现了UAV集群能够通过机间协同提高搜索任务效率的优势。
(3) 在协同搜索任务中,UAV集群规模及有效通信距离与协同搜索效率之间呈现出非线性关系,可以通过数值仿真为实际任务中的集群设计提供一定指导。
本文假设UAV集群之间的有效通信仅受距离约束,暂未考虑通信延时、丢包等约束条件对UAV集群协同搜索的影响,后续研究中可考虑通信延时、丢包等情况,进一步完善UAV集群协同搜索方法。
猜你喜欢
重庆理工大学学报(自然科学)(2022年1期)2022-02-18
纺织科学研究(2021年9期)2021-10-14
纺织科学研究(2021年6期)2021-07-15
北京航空航天大学学报(2021年5期)2021-06-09
军事运筹与系统工程(2019年4期)2019-09-11
信息化建设(2019年2期)2019-03-27
决策(2018年8期)2018-12-10
决策(2018年11期)2018-11-28
大科技·C版(2018年11期)2018-10-21
小天使·四年级语数英综合(2018年1期)2018-07-04