
危险天气下的实时动态改航策略研究
2022-05-06 13:20杨昌其付熙文蔡子牛邹德龙
科技和产业 2022年4期
杨昌其, 付熙文, 蔡子牛, 邹德龙
(中国民用航空飞行学院 空中交通管理学院, 四川 广汉 618307)
近年来随着民航业的发展,航路航线上的危险天气等气象要素对航空运输的影响越来越显著,飞行过程中的危险天气区域是影响航班正点率的主要原因。而目前针对该问题的处理方式仍为人工判别,自动化程度较低,这不仅增加了空中交通管制员的工作负荷,还给民用航空运输业带来了不便。不仅如此,由于天气预报的不确定性,空中交通管制员通常会选择较为保守的距离绕过天气活动。天气预报也并不总是将当前条件与计划航路的进展相匹配,并且由于空中交通管制员在天气事件中特别繁忙,因此他们可能会错过围绕恶劣天气的更有效的路线的可行机会[1]。
危险天气区域的直接影响就是导致空域容量的减小,当前常见的应对方法主要包括地面等待措施、空中等待措施和改航措施[2]。前两者在实际运行中相对容易实现,但是燃油和时间的成本大大增加;虽然空域容量减小,但是在空域流量未达到容量时,实施改航措施是最有效也是最经济的办法。另外由于危险天气的位置是随着时间不断变化的,当飞机临近存在危险天气区域的空域时,仅采用起飞前所规划的静态航路并不能满足实际的应用,因此有必要进行实时路径规划[3]。
目前,国内外已经有很多学者研究了在危险天气下的改航策略问题。Dixon等最早于1993年研究了危险天气影响下的改航路径规划问题[4]。Taylor等利用模拟退火方法确定受天气影响的航班在运行上可接受的备选航线[5]。在国内,李雄等在二维平面内利用几何算法进行恶劣天气下的该行路径规划[6]。赵元棣等利用A*算法构建了静态和动态条件下的改航路径快速规划模型,提出了动态危险天气下的快速改航规划的方法[7]。张兆宁等分别在2015年和2016年提出危险天气下基于多重Morphin算法的终端区三维实时改航方法和散点状分布危险天气下的终端区动态改航方法[8]。杜实等也在2020年通过构建实时动态环境模型,并利用目标粒子群算法对改航路径进行动态规划[9]。
1 危险天气区的划分
危险天气主要是指雷暴、湍流、飓风、强对流和风切变等中小规模天气系统。危险天气区域根据其分布差异分为块状区域、带状区域和散点状区域。
当对航路进行的动态规划时,可以将需要改航的空域看作是二维的空间,利用栅格化地方式描述当前空域的信息。其中,空域栅格的状态分别为1或0,0表示为自由的空域栅格,1为有天气的空域限制区域。由于危险天气在实际情况中是不断的移动的,因此可以将已知的危险天气区域用栅格法在空域中表示出来,如图1所示。
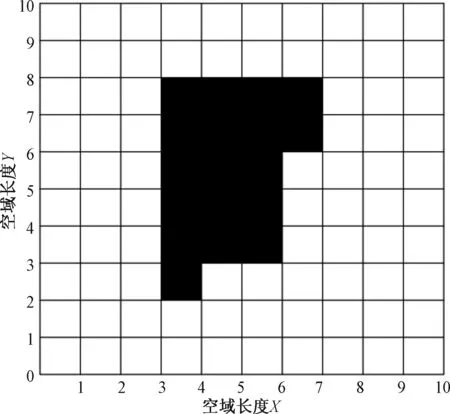
图1 危险天气区域运行环境栅格
按照以下方法来模拟危险天气区域的移动:
1)空域栅格的初始状态为0,所有的空域栅格都是可以通过的,将已知的危险天气的范围与位置在空域的相应位置划设出来。
2)已知危险天气区域的栅格按照一定的速度及方向进行移动。
设在t时刻,一个有天气的空域限制栅格i的位置为[Xi(t),Yi(t)],移动速度为Vi(t),则在t+1时刻的该空域限制栅格的位置更新为
Xi(t+1)=Xi(t)+kVi(t)
(1)
Yi(t+1)=Yi(t)+kVi(t)
(2)
式中:k为根据已知移动方向所设置的参数,取值为1或-1。
2 改进人工势场法的改航策略
人工势场法是由Khatib最早在1986年提出的,基本原理为:将起点、终点、限制区、航空器抽象为一个人造的势场,航空器的运动因此也可以解释为两种具有不同符号的电子势场中的运动粒子[10]。例如,航空器和限制区粒子带正电,目标位置带负电,则限制区产生的斥力势场与目标位置产生的引力势场的合作用力会使航空器自发地避开限制区,向目标位置移动。
现阶段,最常用的人工势场法的引力势场函数为
(3)
式中:λ1为重力函数,λ1>0;d(X)为航空器当前的位置和目标点之间的距离。
常用的斥力势场函数为
(4)
势场力为势场函数的负梯度,则势场引力与势场斥力分别为
fatt(X)=-∇Uatt(X)=λ1(X-Xt)
(5)
(6)
则航空器收到的合作用力应为
(7)
但是传统的人工势场法存在两个主要问题:①目标不可达问题。当目标位置附近有限制区时,目标点周围存在势场高点。由于梯度下降算法的作用,航空器无法越过势场高点到达目标位置。②局部极小值问题。当航空器和目标位置共线,且其收到的吸引力和排斥力合作用力为0时,在该点处合作用力方向是“震荡”的,即导致航空器减速甚至停止或者航向剧烈“震荡”,进而导致航空器无法向着目标点继续前进。
这两个问题在现实情况中是不可能发生的,因此针对以上两个问题,对传统的人工势场法进行改进。
1)针对目标不可达问题,在限制区的势场作用范围内,考虑航空器和目标之间的相对距离,将排斥势乘以航空器当前位置与目标之间的距离加入斥力函数中,具体的表达式分别为
(8)
(9)
(10)

2)针对局部最小值的问题,采用模拟退火算法,当航空器陷入局部最小值时,在航空器当前位置附近随机选择一个点,并利用公式计算出局部最小点和附近随机点的势场大小,若附近随机点的势能小,则将随机点作为航空器下一个航向点;反之,以一定概率P接受附近点为下一个航向点,且T以一定方式衰减,具体形式为
(11)
式中:S为局部最下点;S1为附近随机点。改进人工势场法改航策略的基本流程如图2所示。
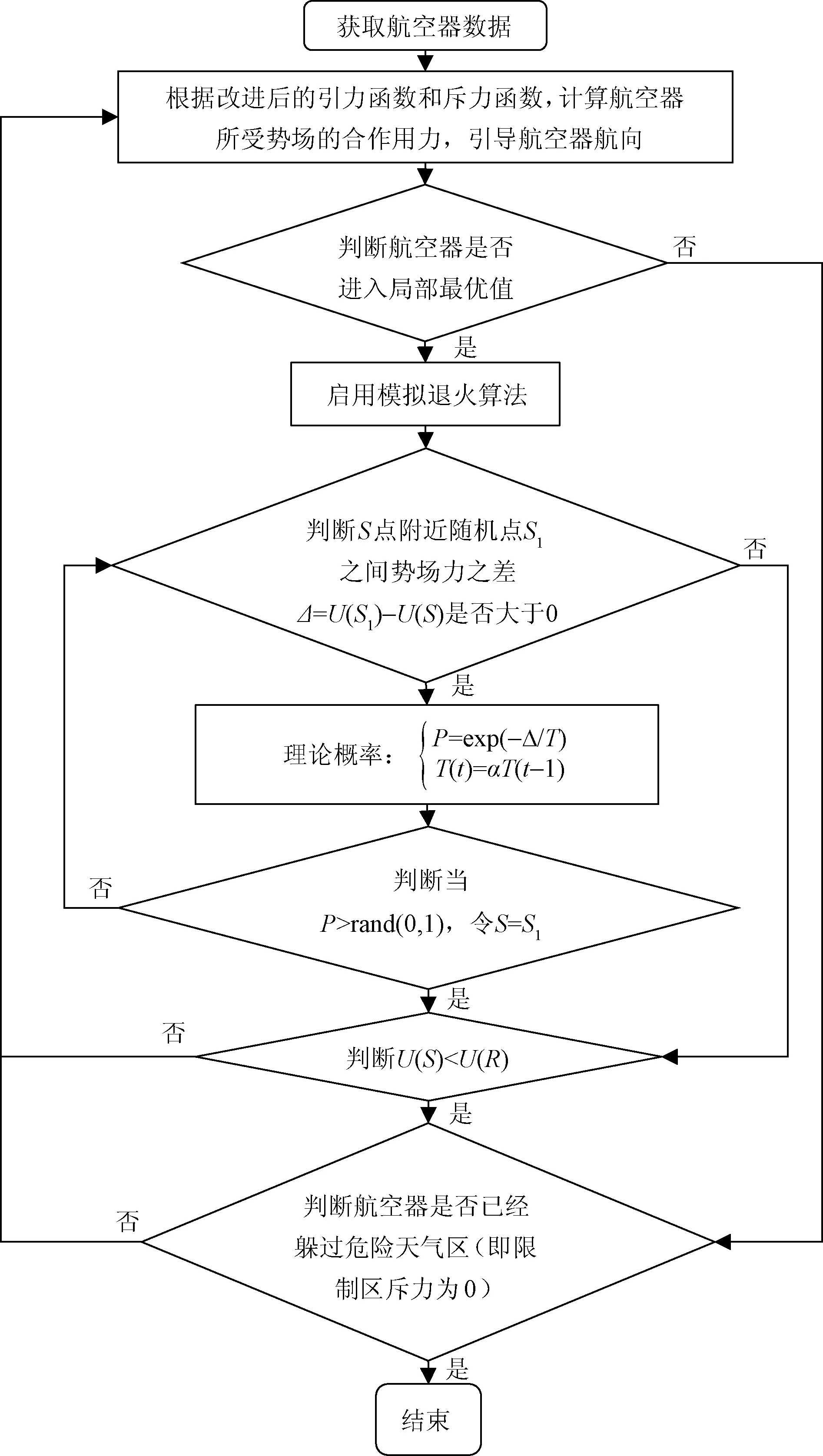
图2 改进人工势场算法的基本流程
3 动态改航策略仿真
改航路径在能够绕飞危险天气区域并保证飞行安全的同时,不影响空域利用率且兼顾运行的效率,因此在建立优化模型前,提出合理的假设,假设条件如下。
1)假设航空器为一个质点,沿航路的中心线以相同的速度匀速飞行,且不考虑航空器个体差异例如速度、机型等。
2)航路网络作为二维的平面网络,不考虑航空器上升下降,且将所有航空器置于同一高度层。
3)由于存在危险天气的限制空域内部是不可以穿越的,对其边界分别经过扩展处理后,属于安全区。
4)由于危险天气区域的移动速度远远小于航空器的飞行速度,因此假设航空器在绕飞危险天气区域时,危险天气区域的移动速度为0。
算法通过MATLAB语言编程进行仿真工作。整个路径仿真的空域运行环境在25×25的栅格中进行动态改航策略仿真,栅格化的网格边长a=20 km。
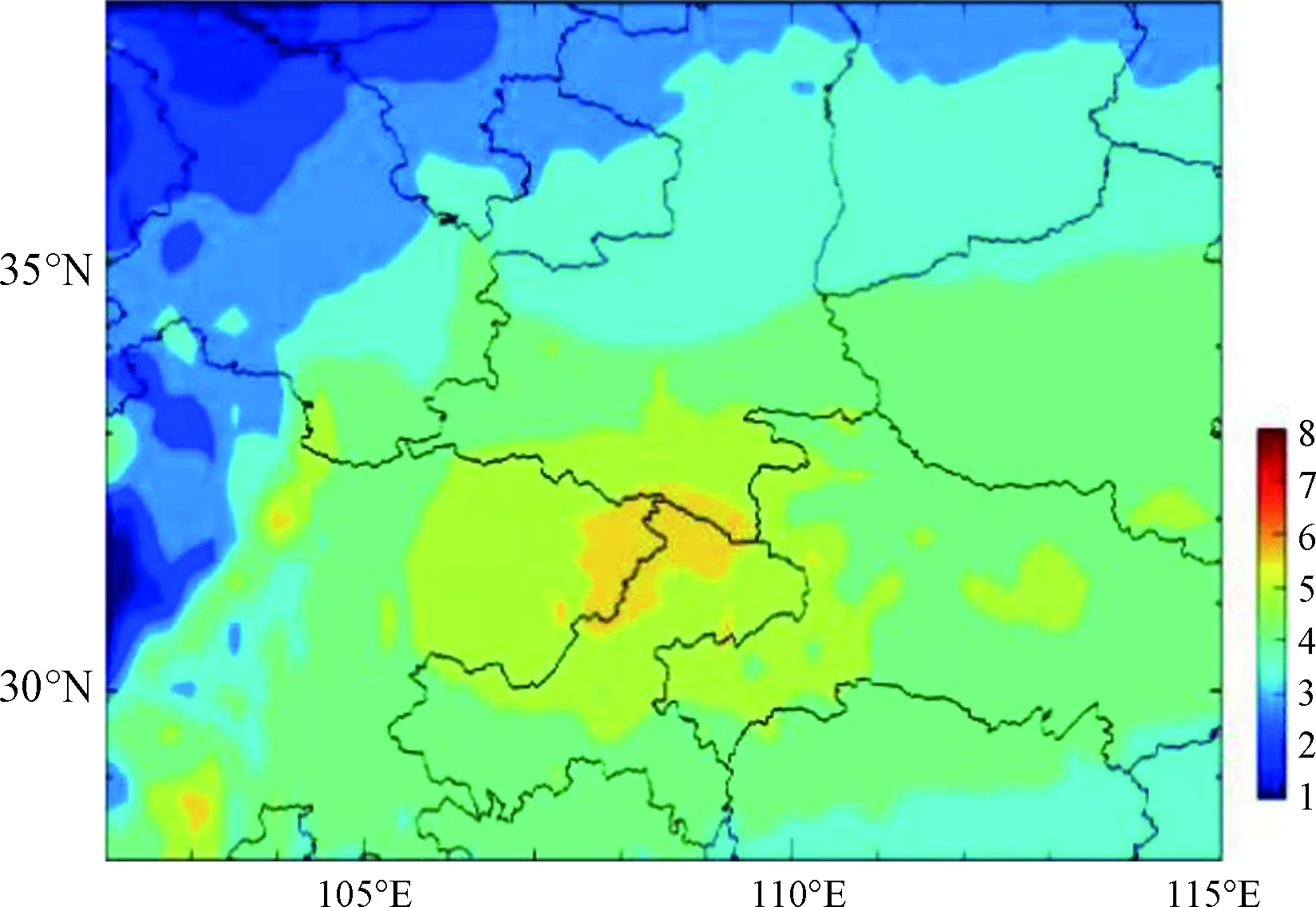
图3 中国气象数据网实时雷达数据图
使用MATLAB软件对初始危险天气区域边界点坐标进行定位。同时将预测后的危险天气区域与中国气象数据网实时雷达数据图像进行对比,拟合度较高,如图3所示,可以为动态环境模型构建提供参考。随着危险天气区域的不断移动,分析在危险天气情况下的基于改进人工势场算法的动态改航策略。危险天气区的基于改进人工势场算法的动态改航路径如图4所示。

图4 危险天气区实时动态改航路径
分析上述的仿真结果可以得知:在危险天气区域对空域航路航线造成影响的场景下,随着危险天气区域的移动,进行实时的动态改航策略,可以有效地规划出一条航路,保证航班安全的规避危险天气的同时,提升航路的容量,减小飞行的成本。在多次反复实验中,路径规划的长度以及所消耗的时间(包括危险天气区域移动、改航路径规划)见表1。
4 结论
1)将中南地区某空域利用栅格化表示,对该空域内已知危险天气区的边界及运动趋势进行预测及环境模型的构建,针对不断移动的危险天气区域,提出基于改进人工势场算法的实时动态改航策略研究,并确定了约束条件。
2)对传统人工势场算法中存在的两个主要问题进行改进,并利用MATLAB仿真实验验证了算法的可靠性。仿真结果表明,运用该算法能够针对动态的危险天气区域,得到实时动态改航策略,具有一定的稳定性和较强的适应性。
3)方法仅考虑单架航空器在二维的改航策略研究,未涉及多架航空器或多条航路的空域,该问题将是下一阶段的研究方向。
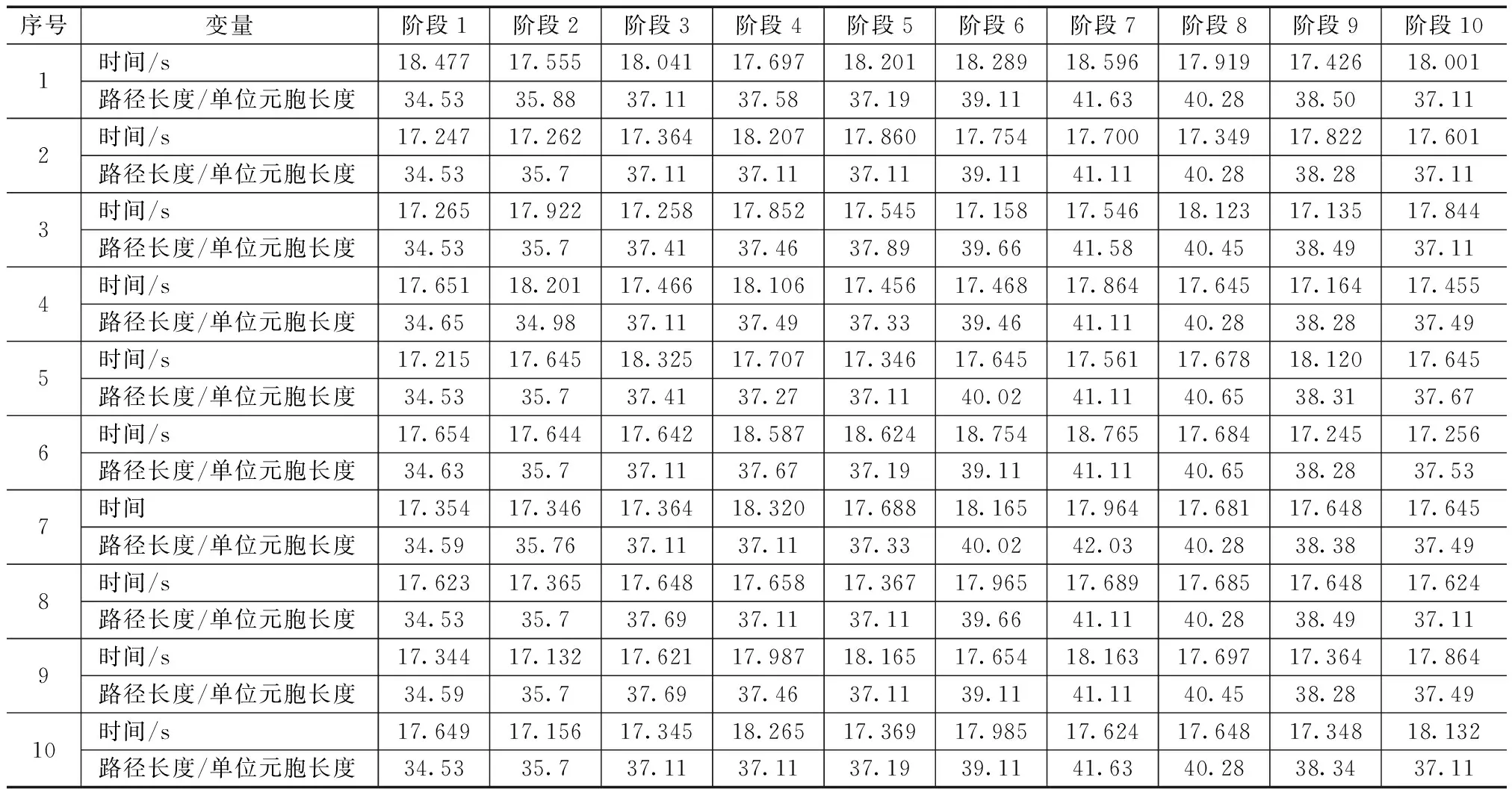
表1 3种天气下的最优路径长度及耗时结果
猜你喜欢
中国海事(2022年9期)2022-10-21
火力与指挥控制(2022年2期)2022-03-23
西华大学学报(自然科学版)(2022年2期)2022-03-17
重庆理工大学学报(自然科学)(2022年1期)2022-02-18
科技信息·学术版(2021年1期)2021-12-17
西安航空学院学报(2021年1期)2021-07-20
北京航空航天大学学报(2021年5期)2021-06-09
科学与财富(2021年33期)2021-05-10
航空维修与工程(2021年1期)2021-04-12
大科技·C版(2018年11期)2018-10-21
