
基于新型轴向电涡流阻尼器的拉索多模态减振性能研究
2022-05-05 02:30黄智文陈政清华旭刚
振动与冲击 2022年8期
肖 潇, 黄智文, 陈政清, 华旭刚
(1. 湖南大学 风工程与桥梁工程省重点实验室,长沙 410082;2. 湖南大学 振动与冲击技术研究中心,长沙 410082)
斜拉索具有自振频率低、固有阻尼小等特点,极易发生风雨振、涡振和参数共振等振动病害[1]。理论研究和工程实践表明,安装索端阻尼器是减小各类拉索振动病害的有效措施[2-3]。按阻尼特性来分,目前使用最广泛的索端阻尼器主要有线性黏滞阻尼器和磁流变阻尼器。前者采用被动控制策略,能给中等长度的拉索提供足够的附加阻尼,有效抑制拉索振动。然而,千米级斜拉桥的拉索长度超过500 m, 其多个模态都有发生大幅振动的可能,因此要求索端阻尼器能为拉索的多个模态都提供足够的附加阻尼。线性黏滞阻尼器可为拉索提供的最大附加模态阻尼比仅由其安装高度决定,且阻尼器的最优阻尼系数与拉索的模态阶次成反比[4-7]。随着拉索长度的不断增大,阻尼器的相对安装高度也不断减小,线性黏滞阻尼器也就越难同时为拉索多个模态提供足够的附加阻尼;另一方面,磁流变阻尼器的阻尼系数可以由输入电流的大小来调节,从而可以通过利用半主动控制算法对拉索多个模态实现最优控制[8-10]。然而,基于半主动控制算法的磁流变阻尼器需要有稳定的电源供应,还要防止因磁流变液沉淀而导致的性能退化[11]。
近年来,基于负刚度阻尼器和惯质的拉索被动耗能减振理论受到关注[12-14]。在保持拉索安装高度不变的条件下,在线性黏滞阻尼器系统中引入负刚度或惯质,都可以显著提高阻尼器系统对拉索单个模态的减振效果。然而相比单模态控制,引入负刚度或惯质对提升拉索多模态的减振效果并没有那么显著。一个重要的原因在于引入了负刚度或惯质后,减振系统中线性黏滞阻尼器的最优阻尼系数仍然与拉索模态阶次相关,因此难以实现多个模态的最优控制[15]。
除线性黏滞阻尼器外,指数型液体黏滞阻尼器和摩擦阻尼器等非线性阻尼器的拉索减振效果也受到一些学者的关注。Main等[16]基于单位周期内非线性阻尼力与拉索张力之间的不平衡力均方差最小的原则,推导了指数型液体黏滞阻尼器最优阻尼系数的解析表达式,并发现当阻尼器的速度指数α=0.5时,其最优阻尼系数与拉索模态阶次无关。Krenk等[17]利用非线性阻尼器在一个周期内耗能与线性阻尼器相等的原则,推导了分数阶阻尼力模型和指数型液体黏滞阻尼器的最优阻尼系数表达式。基于Krenk等提出的上述等效线性方法,Hoang等[18]分析了摩擦阻尼器和双折线阻尼器等非线性阻尼器的拉索减振效果,并发现通过合理的参数设计,可以使各阶模态对应的最优阻尼器参数较为接近,从而达到比线性阻尼器更好的多模态减振效果。周海俊等[19]和王慧萍等[20]分别通过试验和有限元分析发现摩擦阻尼器可提供的最大附加模态阻尼比大于线性黏滞阻尼器,且附加模态阻尼比具有振幅依赖性。Chen等[21]提出了采用谐波平衡法分析安装有指数型液体黏滞阻尼器和摩擦阻尼器的斜拉索稳态响应,并证明了上述非线性阻尼器可提供的最大附加模态阻尼比高于线性黏滞阻尼器。
本文研究一种非线性速度型阻尼器—新型轴向电涡流阻尼器(ball screw type axial eddy current damper,BS-ECD)对拉索多模态的减振效果。首先介绍了新型轴向电涡流阻尼器的非线性阻尼特性,并根据耗能相等的原则计算了其等效阻尼系数的解析表达式。然后基于等效线性化假定,推导了拉索附加模态阻尼比与BS-ECD设计参数之间的关系,并以使拉索多个模态附加阻尼比的最小值最大化为目标,开展了轴向电涡流阻尼器的参数优化设计和减振效果评价,最后分析了最优参数偏差和阻尼器位移幅值变化对控制效果的影响。
1 电涡流阻尼器的非线性阻尼特性
在结构振动控制领域,长期以来都认为电涡流阻尼是一种线性阻尼[22]。实际上,类似于电涡流缓速器[23],随着导体板与磁场之间的相对运动速度不断增大,电涡流阻尼的速度非线性会逐渐显著。近年来,陈政清教授团队开发了基于滚珠丝杠的新型轴向电涡流阻尼器,如图1所示,利用滚珠丝杠的放大作用,导体板和磁场之间的相对运动速度可以达到10 m/s的量级。通过理论分析[24]和大型阻尼器性能试验[25-26],表明BS-ECD的阻尼特性具有显著的速度非线性,而且能够用Wouterse模型进行较好地描述。
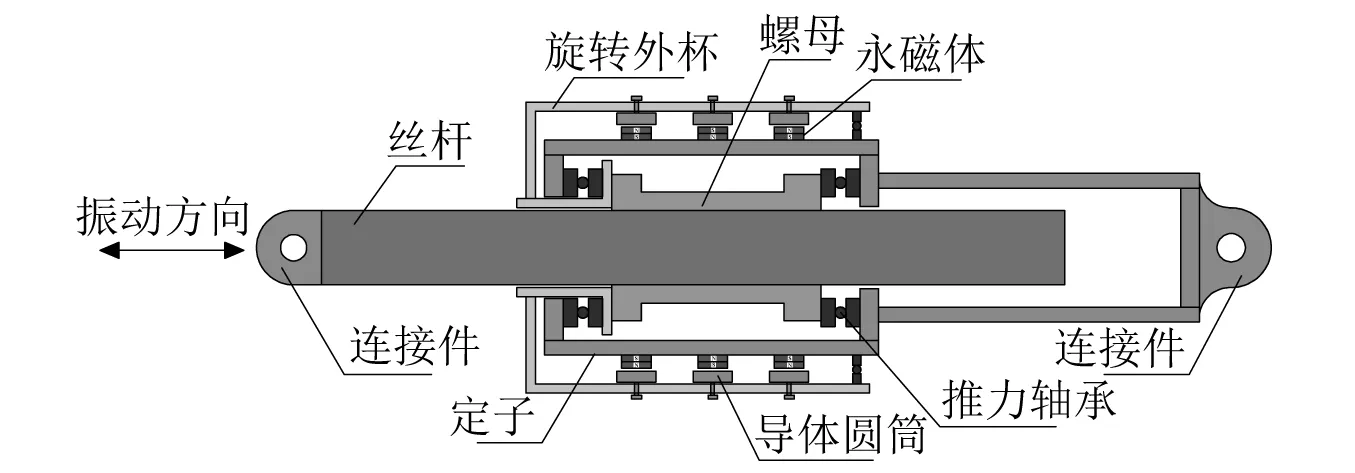
图1 BS-ECD的构造原理示意图Fig.1 Schematic of the BS-ECD
Wouterse[27]模型的数学表达式如式(1)所示
(1)

根据式(1)绘制的阻尼力速度曲线,如图2所示。可以看到,BS-ECD的阻尼力速度非线性与传统的液体黏滞阻尼器存在显著差异:在临界速度以前,电涡流阻尼力随着轴向速度的增加而增加,但增速逐渐减小;达到临界速度时,阻尼力达到峰值;超过临界速度以后,电涡流阻尼力呈逐渐下降的趋势。因此,BS-ECD的临界速度vc越小,阻尼力的速度非线性效应越强。

图2 电涡流阻尼力-速度曲线Fig.2 Eddy current damping force-speed curve
根据Krenk等提出的等效线性化原则,在分析非线性阻尼器性能及参数优化时,采用阻尼力在一个周期内耗能与线性黏滞阻尼力相等来得到对应的非线性阻尼器的等效阻尼系数ceq
(2)

(3)
从式(3)可以看到,BS-ECD的等效阻尼系数不仅与拉索参数有关,还与阻尼器的临界速度、峰值阻尼力,以及阻尼器安装处拉索的位移幅值up有关。
非线性液体黏滞阻尼器是目前应用最为广泛的一种被动耗能减振装置,其数学模型为[28]
(4)
式中:cα为黏滞阻尼器的阻尼系数;α为速度指数; sgn(·)为符号函数。当α=1时,式(4)正好表示线性黏滞阻尼器的数学模型。非线性黏滞液体阻尼器的等效阻尼系数可表示为[29]
(5)

2 拉索多模态减振性能分析
2.1 拉索-BS-ECD系统的附加模态阻尼比
本文采用张紧弦模型来描述斜拉索,张紧弦-BS-ECD的物理模型如图3所示。张紧弦模型虽然简单,但是能反映拉索的主要受力特性,而且相关研究结论只要经过适当修正就能推广到考虑垂度和抗弯刚度的斜拉索。
基于等效线性化原则,可以用等效阻尼系数来衡量并计算非线性阻尼器的阻尼性能和拉索-非线性阻尼器系统的等效附加模态阻尼比,其中系统的无量纲阻尼系数、模态阻尼比公式为
(6)
(7)
式中:ηn为无量纲阻尼系数;xp为阻尼器距拉索锚固端的距离;H为拉索张力;ζn为拉索第n阶模态的附加阻尼比;L为拉索长度。

图3 拉索-BS-ECD系统的张紧弦模型Fig.3 The model of taut cable with BS-ECD
观察式(7)可以发现,当且仅当无量纲阻尼系数ηn=1时,拉索模态阻尼比达到最大值0.5xp/L。将式(3)代入式(6),同时令ηn=1可得
(8)
由式(6)可知,对于线性黏滞阻尼器,当指定拉索安装位置时,只存在唯一的阻尼系数使某一阶的控制效果达到最优。而从式(8)可以看出,由于BS-ECD存在临界速度vc和峰值阻尼力Fm两个设计参数,在对阻尼器进行参数设计后,可以使拉索的第i阶模态和第j阶模态同时取到最优值。此时BS-ECD的临界速度vc满足
(9)
如果指定了拉索受控模态i和j,通过求解式(9)后可以求得相应的临界速度vc,再代入式(8)便可以求出电涡流阻尼力峰值Fm。
接下来以Hoang等研究中的斜拉索为例,来说明轴向电涡流阻尼器的参数特点。拉索单位长度质量m=132 kg/m,索长L=540 m,张拉力H=8 270 kN,阻尼器安装位置距拉索锚固点距离xp=10 m,阻尼器位移幅值up=2 cm。假定轴向电涡流阻尼器可以使拉索第1阶模态和第4或第8或第15阶模态的无量纲阻尼系数等于1,则根据式(9)和式(8)可以得到如表1所示的轴向电涡流阻尼器参数。可以看到,轴向电涡流阻尼器的临界速度介于0.045~0.085 m/s,它可以通过调整阻尼器中的导体板厚度和滚珠丝杠的导程实现。峰值阻尼力介于16~27 kN,它可以通过调整永磁铁的数量实现。

表1 满足不同设计工况的轴向电涡流阻尼器参数Tab.1 The ECD’s parameters corresponding to the optimal modal damping ratio in cable’s first and highest mode simultaneously
依据等效线性化原则,对于非线性液体黏滞阻尼器而言,当ηn=1时阻尼器参数应该满足
(10)
若假定非线性黏滞液体阻尼器也能使拉索某两阶模态的阻尼比同时达到最优值,则对应的阻尼器参数应满足
(11)
求解式(11)可以发现,当且仅当α=0时,拉索的各阶模态阻尼比可以同时达到最优,即此时非线性黏滞液体阻尼器转变为摩擦阻尼器。
2.2 多模态减振参数优化设计方法及结果对比
长拉索的前几阶模态都有发生大幅振动的可能,所以对于拉索的多模态减振,设计目标应使拉索前几阶模态的附加阻尼比都尽可能大。根据该设计目标,当确定了设计关注的拉索前n阶模态后,轴向电涡流阻尼器的参数采用如下方式进行优化:确定一组电涡流参数(Fm,vc),使拉索前n阶模态中模态阻尼比的最小值达到最大,即求解下列最优化问题
在部署方式上,支持分布式部署和负载均衡配置。各子站拥有独立的域名,并支持独立的子站维护管理体系,同时主站与各子站、子站间的信息可以互相共享呈送,实现站点间的数据调度与交换,即采用“Web服务器+数据库服务器+数据存储”架构。网站群的主站与各子站Web应用和数据库可部署在同一或不同服务器上。
max{min[ζ1(Fmax,vc),ζ2(Fmax,vc),…,
ζn(Fmax,vc)]}
(12)
非线性黏滞阻尼器的参数采用同样的目标进行优化。
以2.1节所述的拉索参数和阻尼器安装位置为例,基于上述优化策略,分别以拉索前4阶和前8阶模态为控制目标,求解了轴向电涡流阻尼器的最优临界速度和最优峰值阻尼力,结果如表2所示。可以看到,由上述优化策略得到的电涡流最优临界速度与表1中通过式(9)所求得的结果一致,但两种情况下所得到的峰值阻尼力不同。这表明在上述多模态优化策略所得到的电涡流最优临界速度下,通过调整电涡流阻尼器的峰值阻尼力可以使拉索第1阶和第n阶模态的无量纲附加阻尼比同时达到最大值0.5。
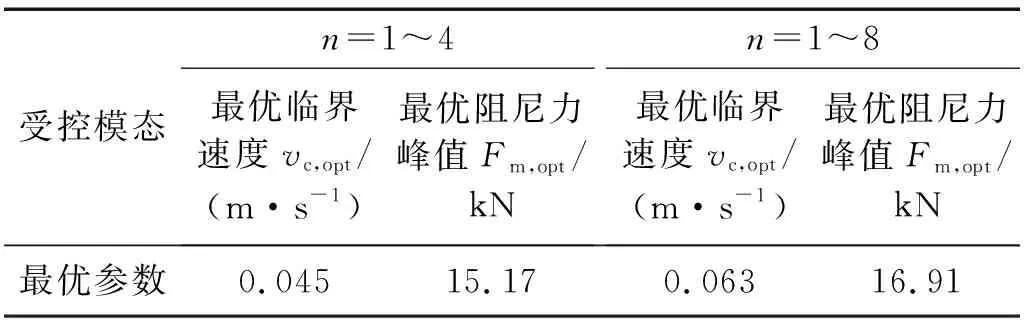
表2 电涡流阻尼器参数优化结果Tab.2 Optimization results of critical speed parameters of eddy current damper
图4(a)和图4(b)分别给出了拉索受控模态为1~4阶和1~8阶时,拉索无量纲附加模态阻尼比ζn/(xp/L)随BS-ECD峰值阻尼力的变化规律,其中阻尼器的临界速度取表2所示的最优值。可以看出,第1阶和第n阶模态阻尼比曲线正好重合,而从第2~第n阶模态,与最大附加模态阻尼比0.5xp/L对应的阻尼器峰值阻尼力随着模态阶次的增加而缓慢增加,从而使BS-ECD可以达到更好的多模态减振效果。以图4(b)为例,与第2阶模态最大附加阻尼比对应的阻尼力峰值为12 kN,而与第8阶模态对应的峰值阻尼力为22 kN。

图4 最优临界速度下拉索无量纲模态阻尼比随峰值阻尼力的变化曲线Fig.4 Variations of cable’s modal damping ratio in different orders under the optimal critical velocity
从图4可以进一步得到,当临界速度和峰值阻尼力都取最优值时,拉索各阶模态的无量纲附加阻尼比结果如图5所示。从图5(a)可以看到,当拉索受控模态为1~4阶时,各阶模态无量纲附加阻尼比分别为0.496,0.494,0.498和0.498,都非常接近最大值0.5;从图5(b)可以看到,当拉索受控模态为1~8阶时,各阶模态无量纲附加阻尼比都大于0.48,说明BS-ECD对拉索的多模态振动有较好的控制效果。
图5还对比了BS-ECD与非线性液体黏滞阻尼器的优化结果。可以看到,速度指数α越小,非线性液体黏滞阻尼器的多模态减振效果就越好,其中当α=0.3时,拉索各阶模态的附加阻尼比与轴向电涡流阻尼器基本相当。当非线性液体黏滞阻尼器退化为线性黏滞液体阻尼器时,多模态控制效果较差。

图5 电涡流阻尼器与黏滞阻尼器对拉索多模态减振性能比较Fig.5 Comparison of eddy current damper and viscous damper on cable’s multi-mode vibration control performance
3 多模态减振效果地参数敏感性分析
3.1 阻尼器最优参数敏感性分析
在实际工程中,BS-ECD的实际参数可能偏离最优设计值,因此有必要分析多模态减振效果对阻尼器最优参数的敏感性。分别考虑阻尼力峰值Fm和临界速度vc从最优值偏离±20%,得到受控模态分别为第1~4阶和第1~8阶时,拉索附加模态阻尼比的变化情况,如图6和图7所示。
从图6(a)和图6(b)可以看到,当峰值阻尼力或临界速度从最优值偏离时,BS-ECD能为拉索前4阶模态提供的附加阻尼比最小值的最大值都会有一定程度的降低,但降幅非常小。例如,当峰值阻尼力最优值偏离-20%时,前4阶模态的无量纲模态附加阻尼比中的最小值从0.497降低到0.475,相对降幅为4.6%;当临界速度从最优值偏离-20%时,前4阶无量纲模态附加阻尼比中的最小值降低到0.488,相对降幅为1.9%。

图6 最优电涡流阻尼参数敏感性分析(n=4)Fig.6 Sensitivity analysis of optimal ECD parameters (n=4)

图7 最优电涡流阻尼参数敏感性分析 (n=8)Fig.7 Sensitivity analysis of optimal ECD parameters (n=8)
综上所述,BS-ECD对拉索前8阶模态的减振效果和阻尼器的最优参数偏离敏感度都较低,因此能够较好地适应实际工程中的设计和制作偏差。
3.2 阻尼器位移幅值敏感性分析
由式(3)可知,拉索-BS-ECD系统的模态阻尼比除了与拉索和阻尼器物理参数有关以外,还与阻尼器的位移幅值相关。实际工程采用的拉索可在一定行程范围内工作,因此有必要分析附加模态阻尼比对阻尼器位移幅值的敏感性。表2给出的参数优化结果是针对阻尼器安装处拉索的位移幅值等于0.02 m的情况。图8在此基础上分析了当阻尼器位移幅值变化时,拉索前4阶或前8阶模态附加阻尼比的变化情况。
从图8(a)和图8(b)可以看到,当BS-ECD的工作行程偏离其设计位移幅值时,各阶模态的附加阻尼比都会逐渐降低,而且模态阶次越高,受到的影响就越大。例如,在图8(a)中,当阻尼器位移幅值在0~0.02 m内变化时,拉索第1阶模态的阻尼比变化幅度仅为3.3%,但第4阶模态的无量纲模态阻尼比从设计值0.498降低到了0.18,降幅达到了60%左右。对比图8(b)和图8(a)可以发现,随着受控模态阶次的增多,高阶模态的附加阻尼比受阻尼器位移幅值的影响也越明显。

图8 拉索各阶模态阻尼比随阻尼器位移变化情况比较Fig.8 Comparison of the damping ratio of each mode of the cable with the displacement of the damper
尽管由BS-ECD提供的拉索附加模态阻尼比对阻尼器位移幅值比较敏感,但振幅敏感性可能并不会降低BS-ECD这类非线性阻尼器对风雨振、涡振等拉索流固耦合振动的减振控制效果。从理论上看,在风荷载作用下,拉索的位移响应是逐渐增加的,当阻尼器位移响应未达到设计值时,它提供的附加阻尼比也较小,此时拉索和阻尼器的位移响应都继续增加。当阻尼器的位移响应增加到接近设计值时,它提供的附加模态阻尼比也达到设计目标,此时阻尼器耗能和风荷载输入的能量达到平衡,拉索响应不再增加。因此,如从时域上看,振幅依赖性可能不会对BS-ECD的减振效果造成影响,但仍应再仔细研究。
针对非线性阻尼器拉索减振性能的振幅依赖性,Hoang等提出将具有振幅依赖的拉索附加模态阻尼比在阻尼器的工作行程ΔDc内平均,得到具有行程平均意义的附加模态阻尼比。对于电涡流阻尼器而言,行程平均意义的模态阻尼比可表示为
(13)
根据式(13),图9(a)和图9(b)给出了当阻尼器工作行程设计值为0.02 m拉索受控模态分别为前4阶和前8阶时,拉索前4阶和前8阶的平均附加模态阻尼比随峰值阻尼力的变化情况。可以发现,考虑行程平均后,各阶模态附加阻尼比的峰值均有不同程度的下降,而且模态阶次越高,降低越严重。然而值得注意的是:即便在行程平均后拉索各阶模态阻尼比的最大值会略有下降,但对于拉索多模态的减振效果来说电涡流阻尼器还是要明显优于线性黏滞阻尼器。例如,对于拉索前8阶模态的减振控制,从图9(b)可以看到当BS-ECD的临界速度按2.2节的优化结果取0.063 m/s,阻尼力峰值取9.75 kN,则BS-ECD能够为拉索第1~8阶模态的无量纲附加模态阻尼比在0.408~0.494;另一方面,从图5(b)可以看到,当线性黏滞阻尼器按多模态减振控制优化时,它可为拉索前8阶模态提供的无量纲附加阻尼比在0.314~0.500,从控制效果的下限来看,明显低于BS-ECD。
综上所述,在进行实桥拉索减振设计时,可以按照式(13)计算安装电涡流阻尼器以后拉索各阶模态的附加阻尼比,其中ΔDc取为电涡流阻尼器的设计行程,这样可以偏保守地估计电涡流阻尼器的减振性能。
4 结 论
本文基于等效线性化理论分析了轴向电涡流阻尼器的速度非线性对拉索附加模态阻尼比的影响,并针对拉索多模态控制,计算了轴向电涡流阻尼器的最优临界速度、峰值阻尼力和附加模态阻尼比,评价了其减振性能,最后分析了阻尼器减振效果对最优参数和位移峰值的变化的敏感性。主要结论如下:
(1) 存在一组轴向电涡流阻尼器的临界速度和峰值阻尼力,可以使拉索任意两阶模态的附加阻尼比同时达到最大值。
(2) 当指定阻尼器的工作行程时,通过参数优化可以使轴向电涡流阻尼器的多模态减振效果优于线性黏滞阻尼器和非线性液体黏滞阻尼器,且减振效果对最优参数变化不敏感。
(3) 与其他非线性阻尼器一样,轴向电涡流阻尼器提供的附加模态阻尼比也具有明显的振幅依赖性,当阻尼器的工作行程偏离设计值时,其减振效果会有较明显的降低,后续应仔细研究。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
建材发展导向(2022年5期)2022-04-18
河南建材(2021年9期)2021-08-27
同济大学学报(自然科学版)(2021年7期)2021-08-07
电子技术与软件工程(2021年10期)2021-07-05
地震研究(2021年1期)2021-04-13
北京理工大学学报(2020年11期)2020-12-15
风能(2020年4期)2020-10-10
物理通报(2019年11期)2019-11-07
大陆桥视野·下(2016年11期)2017-02-28
