
电磁驱动机器鱼实验平台的设计
2022-04-28 04:36朱红秀褚彦斌
机械设计与制造 2022年4期
朱红秀,杜 闯,褚彦斌,徐 亮
(中国矿业大学(北京)机电与信息工程学院,北京 100083)
1 引言
机器鱼作为水下机器人的代表,因其在水下运动具有高效、高机动的特性,得到了科研人员的广泛关注[1−5]。随着各界对机器鱼的深入研究,机器鱼的驱动方式开始逐渐朝向多元化发展。文献[6]利用水中藻类的趋光性来驱动水下机器鱼游动;文献[7]基于介电弹性体致动器(DEAS)实现软仿生机器鱼的设计;文献[8]研制了一种由宏观纤维复合材料(MFC)智能材料驱动的机器鱼。因电磁驱动器具有高效,稳定,节能,易于控制等特点,故围绕电磁驱动器对机器鱼实验平台的设计进行了深入研究。
2 电磁驱动原理
所研究的机器鱼动力源为电磁驱动器,其工作原理,如图2所示。当正弦电流信号处于正半周期,刚通电时线圈处于右侧极限位置如图2位置1,随着通入正方向的电流逐渐变大,线圈的右端磁化为N极,左端磁化为S极,因此线圈和左永磁体相互吸引,而右永磁体互相排斥。在两个力的共同作用下,永磁体推动线圈绕旋转轴顺时针摆动,并摆动到左侧极限位置,如图2位置2或3所示。正弦电压信号变换为负半周期,线圈通入反方向的电流,左端被磁化为N极,右端被磁化为S极,使线圈被右永磁体所吸引并被左永磁体所排斥。在吸引力和排斥力的合电磁场力作用下,线圈被推动并绕旋转轴进行逆时针摆动至图2中的位置4。电磁驱动器的主要工作气隙由永磁体和线圈之间的气隙构成,永磁场和线圈磁场共同组成工作磁场环境。驱动器线圈在气隙磁场力的作用下带动鱼尾绕旋转轴摆动,进而使鱼尾页面实现往复摆动。

图2 电磁驱动器工作原理Fig.2 Principle of the Operation of Electromagnetic Actuators
3 电磁驱动器电磁学仿真
3.1 理论基础
3.1.1 电磁驱动器电路仿真模型
为该线圈被理想化为电感线圈,根据电磁感应定律,电磁驱动器的电路方程如下(1)式所示[9]。

式中:μ—线圈的输入电压;r—线圈的电阻;i—线圈的电流;λ—永磁体的磁通和线圈的磁通均;L—电感。根据电路方程,可以在瞬态仿真中合理设置线圈绕组的输入电压和初始电流。
在AnsoftMaxwell电路模块Simplorer中建立电路模型,如图1所示。

图1 电磁驱动器电路模型图Fig.1 Electromagnetic Drive Circuit Model Diagram
3.1.2 电磁场理论基础
在瞬态磁场中,激励源可以为时变电压源或电流源,并且在所要求解的模型中包含一些规律运动的组件。瞬态磁场求解器中矢量磁势A满足的磁场方程,如式(2)所示:

式中:Hc—永磁体的矫顽力;v—运动物体的速度;A—矢量磁势;Js—源电流密度;σ—电导率。
Ansoft Maxwell 2D瞬态分析时,使用固定在模型一部分上的参考系,并将其速度设为零。运动对象固定在自己的坐标系中,由于表达了运动方程,所以部分时间导数成为时间偏导数,时间的偏导数变成时间的导数,所以运动方程,如式(3)所示:

因此,矢量磁位在每一时间段有限元模型中每一点都可获得。
忽略位移电流和磁滞效应对模型的作用,根据麦克斯韦基本方程得出磁场矢量位函数方程,如式(4)所示:

式中:μ—磁导率;A—磁位矢量;Js—源电流密度;σ—电导率,v—线圈运动速度。整体仿真时,认为磁场为开域,无限远处磁场为零,故选择气球边界条件。
3.1.3 动力学方程
电磁驱动器通电线圈的运动形式为摆动,线圈运动方程,如式(5)所示:

式中:M—线圈的转动力矩;Mr—鱼尾页在水中摆动产生的阻力;J—驱动器通电线圈的转动惯量;α—线圈摆动过程中的角加速度。在瞬态仿真中通过该运动方程可以设置线圈的负载力矩。
综上,由式(1)~式(5),可以建电磁驱动器的瞬态场仿真模型,利用二维有限元仿真的方法仿真分析,可以得到电磁驱动器模型工作时的瞬态特性。
3.2 电磁驱动器的仿真模型
当电磁驱动器正常工作时,线圈在永磁场和电磁场的作用下绕旋转轴摆动,尾页上的力与线圈上的力成比例,线圈在磁场的驱动下移动,因此,通过直接分析磁场中的线圈的运动特性,从而在模型中近似鱼尾页的运动。
由于电磁驱动器磁路的特殊性,线圈摆动过程中摆动弧度较小,为了简化分析过程,只对线圈和两块永磁体在AnsoftMax‐Well2D环境下以z轴为圆柱坐标轴建模,将线圈绕轴旋转运动简化为在运动区域(Band)往复直线运动,其它部分在仿真分析过程中进行了省略,建模情况,如图3所示。

图3 电磁驱动器简化模型图Fig.3 Electromagnetic Drive Simplified Model Diagram
线圈运动过程中的中间位置为原点0mm,z轴正方向线圈运动方向为正,运动范围为(−15~15)mm。使用if函数表示鱼尾页在水中摆动产生的阻力,为了提高分析精度,对Band区域以及线圈处进行网格加密,经多次实验对比,磁体材料选用N35型号烧结钕铁硼,线圈材料为铜。在软件中添加完对应材料后对永磁体产生的磁场进行仿真,根据机器鱼外形尺寸和正交试验多次的仿真结果,电磁驱动器各参数为:电磁驱动器的工作气隙(两个永磁体之间的距离)为18mm,永磁体为直径8mm,高10mm的圆柱体,线圈的内径为6mm,匝数为1000匝。
模型的磁场方向及磁场强度,如图4所示。

图4 电磁驱动器永磁场方向Fig.4 Electromagnetic Drive Permanent Magnetic Field Direction
可看出在永磁体内部磁场方向为S级指向N级且磁场强度最大;在永磁体外部磁场方向为N极指向S级,与现实情况相符,故模型建立正确。
3.3 运动仿真
在AnsoftMaxwell 软件中对电磁驱动器的瞬态磁场仿真分析,仿真速度、位移与力曲线,如图5所示。
由图5可知,给线圈加载10V交流驱动电压后,线圈所受电磁力大小曲线同样呈现正弦状态,在6s的测试时间内保持稳定的变化过程,0.5s时电磁力曲线上升至最高点且最高点的电磁力的值为3.85N,而后下降至最低点且最低点的电磁力值为−3.85N;位移和速度曲线响应时间与电磁力变化时间基本一致且在+15mm与−15mm之间周期性变化。在AnsoftMaxwell 软件中通电线圈在磁场中运动的仿真结果与实际运动情况相符,所以,电磁驱动器运动仿真模型建立正确。

图5 10V电压下速度、位移、力曲线Fig.5 Voltage,Current and Displacement Curves at 10V
4 电磁驱动控制系统设计
4.1 硬件电路
硬件电路由STC89C52单片机最简系统、正弦波发生器,功率放大器,双极性电源,蓝牙控制模块,电磁驱动器组成,该硬件电路连接关系,如图6所示。

图6 硬件电路连接关系图Fig.6 Connection Diagram of Hardware Circuit
电磁驱动控制系统负责生成并输出双极性正弦波控制信号从而控制线圈得电并在磁场情况下做出响应动作,通过蓝牙模块控制单片机产生系列频率单极性正弦波数字信号,正弦波发生器将单极性信号转换成双极性信号的同时对信号进行数模转换,而且内置滤波电路,可以保证输出的正弦波信号平滑,但由于直接由正弦波发生器产生的模拟信号功率较小,驱动能力较弱无法直接驱动通电线圈运动,所以信号需通过功率放大器进行放大使其功率满足实验要求。
因功率放大器需要正负双极性供电,一般情况下只有交流电源为双极性,而机器鱼实验平台若采用交流电供电,则无法实现无线,因此采用两块14.8V的锂电池串联的方法设计出双极性电源,如图7所示。

图7 双极性电源Fig.7 Bipolar Power Supply
4.2 软件部分
在单片机开发过程中,产生正弦波属于非线性的控制过程,适合采用查表法来时时改变系统的参数以达到控制的目的。
在这里使用正弦波信号发生软件产生系列十六进制数组,其中输出点数设置为256,输出精度设置为8,然后在keil4软件中编写程序读取数组,时时改变输出的8 位字节送给外部DA,再由DA生成一个完整的正弦波,如图8所示。

图8 DA转换后的正弦波信号Fig.8 Sine Wave Signal After DA Conversion Generating Software
5 本体设计
5.1 机器鱼外形设计
扫描测量真实金枪鱼外形轮廓的几何参数,利用Matlab 的曲线拟合工具得到其鱼体外形曲线函数[10]:

式中:R(x)—鱼体纵向曲线函数;(rx)—鱼体横向曲线函数。

据此函数拟合曲线及建模,如图9所示。

图9 鱼体曲线和三维鱼体Fig.9 Curve of Fish Body and Tthree−Dimensional Fish Body
5.2 电磁驱动器及外围设计
电磁驱动器装配,如图10 所示。动力输出臂与鱼体通过轴—轴承连接,最终尾部与鱼体的装配,如图11所示。
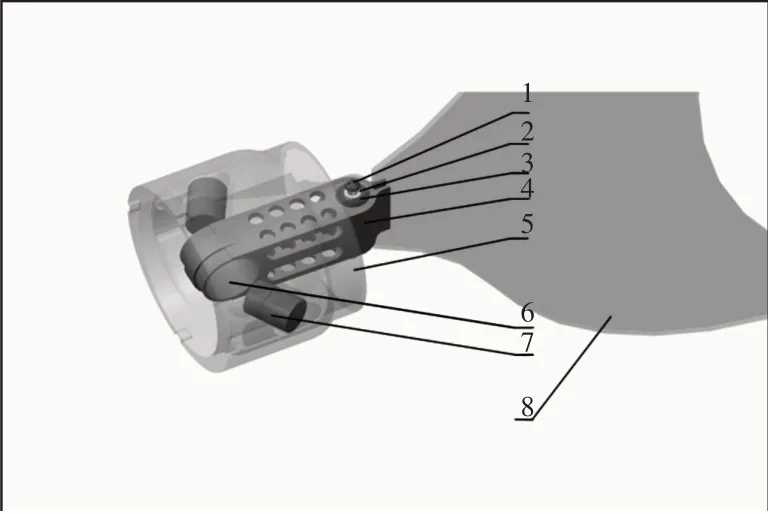
图10 尾部装配Fig.10 Tail Assembly
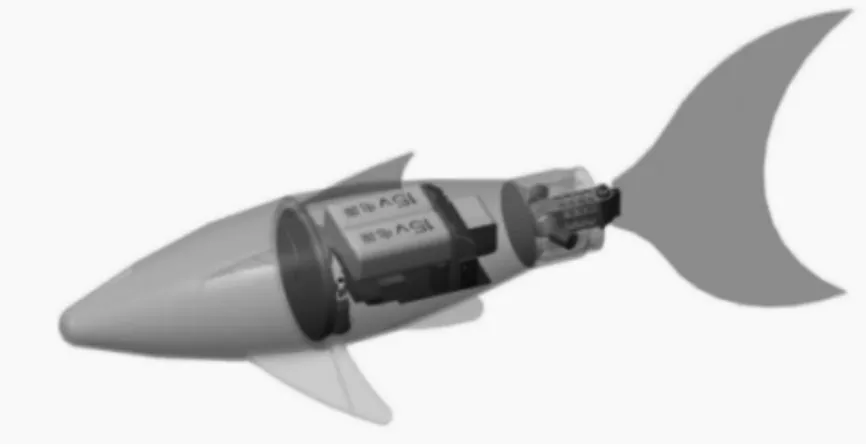
图11 机器鱼总体装配Fig.11 General Assembly of Robot Fish
6 实验
为了探究电磁驱动器通电线圈的电压幅值和频率对机器鱼游动速度的影响,别设置驱动控制信号的频率为0.125Hz、0.25Hz、0.375Hz、0.5Hz、0.625Hz、0.75Hz、0.875Hz、1Hz并在每个频率下测试6V、8V和10V三种不同驱动电压下的机器鱼游动数据,在实验中使用秒表记录相同路程下24组不同频率和不同电压下机器鱼游动时间,进而计算得出相应工况下机器鱼游速值。游动实验中的电磁驱动机器鱼样机,如图12所示。

图12 机器鱼实验现场图Fig.12 Field Map of Robot Fish
从图13可以看出,当驱动电压幅值范围为(4~10)V时,机器鱼的游动速度随着电压幅值的增加而不断增加;当驱动电压频率范围为(0.125~1)Hz时,机器鱼游动的速度首先随着电压频率的增加而增加,直到频率为0.5Hz时游速达到顶峰,0.5Hz之后游速下降。这是由于当电压频率过高时,电磁驱动器的线圈在磁场中摆动的幅度减小,从而导致尾鳍摆动的幅度减小,过小的摆动幅度无法使机器鱼有效提速。

图13 实验结果Fig.13 The Results of the Experiment
7 结论
通过使用AnsoftMaxwell 软件对电磁驱动器建模和仿真,仿真结果验证了对电磁驱动器的工作原理分析的合理性。在控制方面使用读表法编程,并且搭建硬件驱动电路成功产生了用于电磁驱动器工作的正弦波信号,最后对机器鱼进行了细节设计及水下实验。实验证明:(1)当电压范围在(4~10)V 时,随着电压增加,机器鱼的游速会随之增加。(2)电压频率变化过快会导致机器鱼的游速降低。此次研究对今后机器鱼驱动部分的设计和运动控制方面的研究具有一定程度参考意义。
猜你喜欢
大电机技术(2022年1期)2022-03-16
计算机仿真(2022年1期)2022-03-01
组合机床与自动化加工技术(2022年1期)2022-01-27
北华大学学报(自然科学版)(2021年3期)2021-07-13
微特电机(2020年11期)2020-12-30
电脑爱好者(2020年6期)2020-05-26
电子制作(2019年7期)2019-04-25
电子技术与软件工程(2018年7期)2018-02-25
北京航空航天大学学报(2017年5期)2017-11-23
中国新通信(2016年22期)2017-01-13
