
模糊PID算法在印刷机控制系统中的应用
2022-04-28 04:35吴上生任帅康
机械设计与制造 2022年4期
吴上生,任帅康
(华南理工大学机械与汽车工程学院,广东 广州 510641)
1 引言
随着消费市场的升级,消费者对商品标签的精度和质量提出更高要求。不干胶是一种复合原料,不干胶标签经印刷机加工后变成标签制品。传统不干胶标签印刷机各印刷单元之间采用机械传动方式,由于机械结构存在加工、安装误差,且长期运行后易磨损,导致印刷轴之间协同运动存在较大误差。本方案对传动方式进行改进,采用多轴同步控制方式,即各印刷单元由独立伺服电机控制,实现无轴同步运动[1]。
常见的不干胶印刷机控制系统均采用经典PID控制算法,经典PID控制器结构简单、算法易实现,具有较好的鲁棒性,已在工业控制领域中得到普及[2]。但印刷机控制系统是非线性、多干扰的复杂系统,且数学模型不确定,经典PID控制已经无法满足更高精度的运动控制。为了解决上述问题,本方案将模糊控制与PID控制相结合组成模糊PID控制器,模糊PID算法对非线性的复杂系统有更好的精度和鲁棒性,PID参数可以在线修改,提高控制性能。
2 印刷机总体设计方案
2.1 结构与工作原理
不干胶标签印刷机主要由放纸机、送纸轴、印刷轴、拉纸轴和收纸机组成,各单元之间采用无轴传动方式,即各印刷单元之间没有传动结构,由伺服电机直接驱动。
印刷机工作时,放纸机将不干胶标签送入工位,收纸机将其收纳,送纸轴和拉纸轴控制纸张进给量和张力,印刷轴圆周表面装有印刷版实现印刷[3]。
印刷机结构,如图1所示。该印刷机拥有六组印刷轴,可组合印刷多种颜色,印刷机以一组印刷轴为例,如图1所示。

图1 印刷机结构Fig.1 Structure of Printing Machine
印刷机分为间歇式运动和全轮转运动两种运动形式。间歇式运动时,当印版接触标签时,印刷轴与送纸轴、拉纸轴保持同步,实现印刷;当印版离开标签时,送纸轴和拉纸轴减速停止并反方向运动一段距离,当印刷版再次与标签接触时,进入下一次印刷过程。全轮转运动时,印刷轴和送纸轴、拉纸轴始终保持同步运动。
2.2 系统硬件设计
按照不干胶标签印刷机套印精度和生产要求,印刷机控制系统硬件主要由运动控制器、伺服驱动器、伺服电机、触摸屏、电源模块和接近开关组成。印刷机控制系统结构,如图2所示。

图2 控制系统结构Fig.2 Structure of Control System
运动控制器是整个控制系统的中枢,通过接收伺服系统和接近开关等器件信号,发出运动控制指令,控制执行机构运动[4]。
根据控制要求,选用英国TRIO公司的Euro408多轴运动控制器作为控制单元,该控制器可控制8个物理轴和2个虚拟轴的伺服运动,具有灵活的直线、圆弧和主从运动,支持Ethernet−IP、Modbus TCP等通信协议,支持多任务Trio BASIC语言编程。
确认印刷机各轴负载工况,计算负载所需交流电机功率和转矩。根据计算结果,选择安川∑−7系列SGD7S伺服驱动器和安川∑−7系列SGM7G伺服电机各8个,其中6个用于印刷轴,2个分别用于送纸轴和拉纸轴。经计算校核,该伺服电机满足使用要求。
人机交互界面必须满足工作模式切换、参数设置、状态反馈等功能,并且能增强操作人员与印刷机的交互性。
威伦MT6071iE触摸屏适用EasyBuilder Pro 组态软件,支持USB Host、USB Client串行接口,可以满足以上功能。
3 印刷机控制策略
3.1 带前馈补偿PID控制
PID控制将误差信号进行比例、积分和微分运算,三个作用量叠加的输出信号共同控制被控对象。PID控制是控制系统中一种常见的反馈控制,反馈控制是在干扰发生时,通过对偏差控制抵消干扰量,因此会产生稳态跟随误差。前馈控制是按照扰动量进行补偿的开环控制,可以直接校正扰动量,理论上可以消除偏差[5]。带前馈补偿的PID控制器结合了前馈控制和反馈控制的特点,既反应及时,又能消除扰动。
Euro408 多轴运动控制器使用Trio BASIC 语言,其中VFF_GAIN、P_GAIN、I_GAIN、D_GAIN指令分别表示速度前馈增益、比例增益、积分增益、微分增益。带前馈补偿PID控制,如图3所示。

图3 带前馈补偿PID控制Fig.3 PID Control with Feedforward Compensation
前馈补偿控制器为:

输出为PID控制和前馈补偿控制两者输出之和,公式为:

3.2 模糊PID控制器设计及MATLAB仿真
不干胶标签印刷机采用半闭环位置控制,是非线性、时变系统,在不同工况条件下需要调节PID参数,而PID参数修改需要多次调试,复杂且很难进行准确控制。模糊控制具有较好的鲁棒性,易于实现对非线性模型控制[6]。根据印刷机运动特点和控制要求,将模糊控制和PID 控制二者优点进行整合,设计模糊PID控制器,即用模糊推理的结果实时修正PID控制器的参数。模糊PID控制器结构,如图4所示。

图4 模糊PID控制器Fig.4 Fuzzy−PID Controller
模糊PID 控制系统中,编码器检测到用户单位的测量位置MPOS,与用户定义的目标位置DPOS比较得到位置偏差FE,本系统使用E和EC分别表示位置偏差和偏差变化率的语言变量,利用模糊控制得到PID 控制器的参数变化量Kp、Ki、Kd,自校正PID参数输出,使印刷机具有良好的动静态性能,控制系统中PID调节器参数校正公式:

在模糊控制系统中,E和EC作为模糊控制器的输入变量,Kp、Ki、Kd作为模糊控制器的输出量,因此,模糊推理器采用二输入三输出的结构形式。根据经验和实验,输入变量E和EC的模糊论域为[−3,3],量化因子Ke和Kec均为0.01,输出变量Kp、Ki、Kd的基本论域为[−6,6],量化因子Ku为0.01。取E、EC、Kp、Ki、Kd的模糊子集为{NL,NM,NS,Z,PS,PM,PL},其中负大、负中、负小、零、正小、正中、正大与子集元素一一对应[7]。
模糊PID控制器输入、输出选择相同隶属度函数,在语言值较大值两侧分别选择Z型和S型隶属度函数,语言值较小值处选择三角形隶属度函数,以位置偏差E的隶属度函数为例,在MAT‐LAB模糊控制器中隶属度曲线,如图5所示。
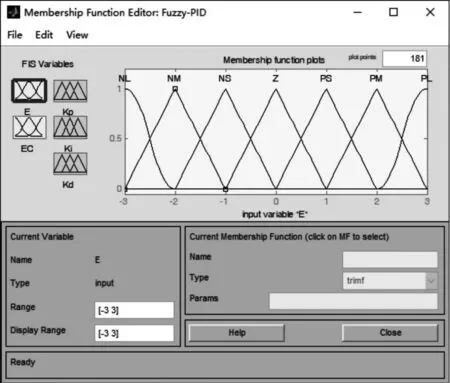
图5 隶属度曲线Fig.5 Membership Curve
根据专业知识和经验,分析偏差和偏差变化率不同值时对输出参数的影响,得出模糊控制规则,如表1所示。
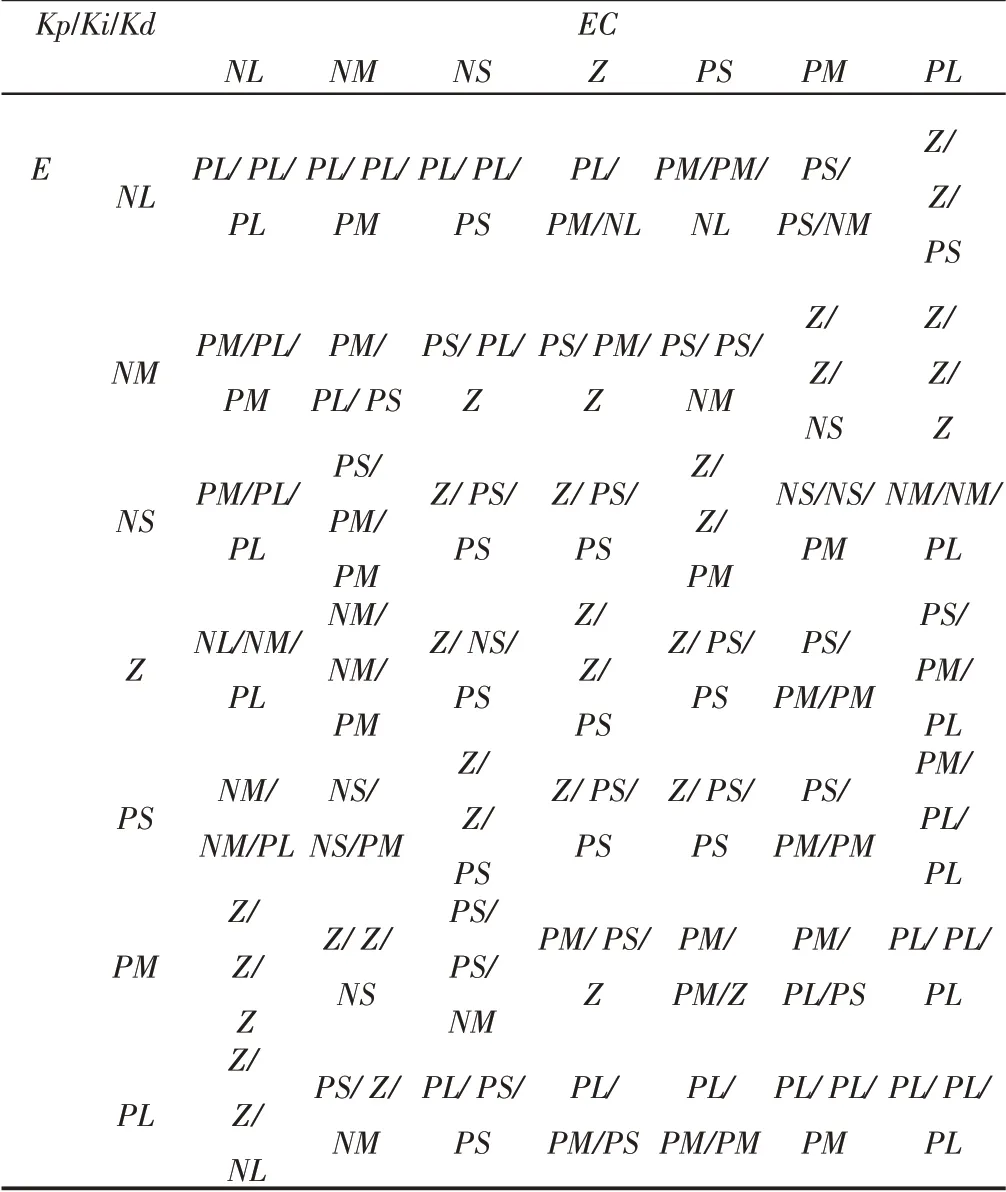
表1 模糊控制规则表Tab.1 Table of Fuzzy Control Rule
将E、EC和Kp、Ki、Kd根据如下语句编写模糊控制规则。
IFEis Ei ANDECisECjTHENKp,Ki,Kd
选择Mamdani型推理,使用重心平均法进行反模糊化得到精确调整PID参数。使用MATLAB中的模糊逻辑工具箱设计模糊控制器,按照模糊PID控制器设计原理,只需在工具箱中设置相应参数,即可得到控制器,生成推理系统的三维空间图[8−9],如图6所示。

图6 推理系统的三维空间图Fig.6 Three−Dimensional Map of the Inference System
3.3 系统软件设计
不干胶标签印刷机控制系统将控制过程分成多个模块:如轴参数设置模块、模糊PID模块、手动模块、自动模块等。根据实际生产需求,在人机交互界面选择对应模块控制印刷机工作,控制系统主程序流程,如图7所示。
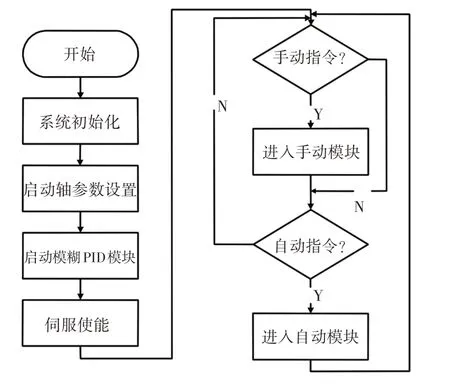
图7 主程序流程图Fig.7 Main Program Flow Chart
Euro408 控制器中有伺服滤波器,通过设置VFF_GAIN、P_GAIN、I_GAIN和D_GAIN参数,实现带前馈补偿PID控制。但是,印刷机工况复杂,不同工况需要修改、调试参数,且操作复杂。模糊PID模块作为控制系统重要的子模块,可以在线修改PID参数值,实现精确控制。在开发环境中使用Trio BASIC语言编写模糊PID控制程序。
4 实验结果与分析
不干胶标签印刷机安装完备,通过以太网将PC与控制器连接,进行现场调试。Motion Perfect v4.2.1作为Trio控制器的开发环境,可通过轴参数界面实时监视轴参数数值变化,位置偏差FE越小,说明套印精度越高。分别使用经典PID控制、带前馈补偿PID控制和模糊PID控制调试印刷机,使位置偏差FE获得一个较小值,当FE大于FE_LIMIT阈值,轴运动会出错并发出警报[10],控制系统硬件实验台,如图8所示。

图8 控制系统实验台Fig.8 Control System Test Bench
当印刷速度为1800 张/h 时,在线调节P_GAIN、I_GAIN 和D_GAIN 的值,使FE 获得较小值,设此时的P_GAIN、I_GAIN 和D_GAIN数值为PID初值。为了实验方便,保持PID初值不变,通过多次修改调试VFF_GAIN值,依然使FE获得较小值,两组数据比较,如表2所示。

表2 PID参数与FE的关系Tab.2 Relationship Between PID Parameters and FE
当印刷速度为3600 张/h 时,由于运行速度改变,再次修改PID参数较为复杂,所以经典PID和带前馈补偿PID依然保持表2中数值不变,调试运行印刷机,记录下此时FE值。以经典PID控制参数为模糊PID算法初始数值,运行模糊PID模块程序,在线自修正P_GAIN、I_GAIN 和D_GAIN,记录下此时PID 参数和FE值,如表3所示。

表3 控制算法参数与FE的关系Tab.3 Relationship Between Control Algorithm Parameters and FE
根据以上印刷机调试实验,易得出结论:带前馈补偿PID控制比经典PID控制具有更好的控制性能,印刷机运行位置偏差更小;对于印刷机非固定工况,模糊PID控制相较经典PID控制和带前馈补偿PID控制具有明显优势,即可适应变化的系统,实时在线修改参数,得到更小的位置偏差,系统稳定性更好。印刷机实物,如图9所示。

图9 印刷机实物Fig.9 Printing Machine
5 结论
针对不干胶标签印刷机进行研究,对印刷机机械传动结构进行改进,采用独立伺服电机,实现印刷机各轴之间无轴同步控制。在详细掌握不干胶标签印刷机的结构和工作原理的基础上,对控制系统进行优化,本方案重点研究模糊PID控制器对印刷机套印精度的影响。通过比较经典PID控制、带前馈补偿PID控制和模糊PID控制,模糊PID控制具有更强的适应性,更好的稳定性能和更高的套印精度。经过调试,印刷速度达到18000张/h时,套印误差仍保持在0.05mm内,满足不干胶标签印刷机生产要求。
猜你喜欢
中医外治杂志(2022年2期)2022-11-28
成都信息工程大学学报(2021年6期)2021-02-12
中医外治杂志(2021年6期)2021-01-04
数学大王·中高年级(2020年11期)2020-11-19
电子制作(2019年16期)2019-09-27
中医外治杂志(2019年3期)2019-01-06
小朋友·快乐手工(2017年8期)2017-08-10
电子制作(2017年7期)2017-06-05
电子制作(2016年21期)2016-05-17
印刷技术·数字印艺(2016年9期)2016-05-14
