基于模糊短反馈分数阶滑模的稳压器压力控制
2022-04-18 10:00钟放鸿张乐年沈冬晖
计算机仿真 2022年3期
钟放鸿,张乐年,沈冬晖
(1. 浙江中烟工业有限责任公司,浙江 宁波 315500;2. 南京航空航天大学机电工程学院,江苏 南京 210000)
1 引言
稳压器是一回路冷却剂系统的主要设备之一,其安全稳定运行直接影响了核电站的安全稳定运行,其主要作用是维持系统压力的恒定,一般设定为15.5MPa左右,过高过低的压力都将会给核电厂的安全运行带来危害[1]。目前,针对稳压器压力的控制大多数仍采用传统的PID控制,该方法具有明显局限性:控制效果、抗干扰能力等。但随着智能控制的发展,如模糊PID控制、单神经元PID控制、自抗扰控制等也被广泛应用。文献[2]介绍了利用模糊规则实现PID参数的整定,但模糊规则及隶属度函数设计完全凭经验,对系统影响较大;文献[3]介绍了单神经元PID控制稳压器压力控制,但该算法控制效果受算法增益。学习速率与控制规则的影响,同样与经验有关;文献[4]介绍了自抗扰控制的应用,但该算法参数太多,调整困难,无法得到最佳的控制效果。
本文针对稳压器压力控制系统设计了一种带有短反馈的模糊分数阶滑模双层反馈控制器。其中滑模控制策略器保证了压力控制系统模型的稳定性及有参数摄动情况下的鲁棒性;分数阶控制能够提高系统的控制余度,实现传统PID由点到面的控制;模糊控制实现滑模控制参数的自适应调整,克服滑模不连续带来的抖振;短反馈算法的引入,构成双层反馈控制,使系统能获得更好的动态响应特性和鲁棒性。经仿真验证,本文提出的方法具有响应速度快、稳定性高、鲁棒性强等性能,同时验证了本文方法的有效性和科学性。
2 稳压器压力控制系统
在核电厂运行过程中,稳压器的压力会根据系统运行情况而发生变化,如温度的变化、功率的改变以及负荷的变化等。当稳压器压力偏离设定值时,将会通过可调功率电加热器组、罐体顶部安全阀组以及喷淋系统的自动调节,以维持稳压器压力的稳定。
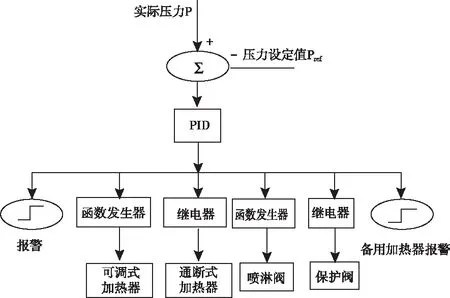
图1 稳压器调节压力工作原理图
图1为稳压器压力控制系统的工作原理。该平衡罐的控制系统由三部分组成[5]:一、异常报警系统,报警信息分为运行装置的报警和备用电加热的报警;二、电加热系统,电加热分为可调式加热器(配备函数发生器,即自动控制逻辑,根据需要的压力值选用不同的加热档位。)和通断式加热器(通断式加热器即定功率加热器,只有开关两种状态,电加热器前设有热保护继电器,防止电加热过电流。);三、喷淋及泄压系统,喷淋系统自动逻辑函数发生器和喷淋阀组成,泄压系统由继电器加安全阀组组成。冷却介质工作压力通过压力变送器将压力信号转换为模拟量的电流信号传递给PID控制器,与设定值进行对比,系统内各设备通过压差大小准确动作。当压差为负值时,冷却介质压力较低,自控模块将选择增大可调式加热器功率,平衡管内饱和蒸汽增加使系统压力上升;当压差为正值时,系统运行压力过高,自控模块将选择打开喷淋阀,冷却水穿过过平衡管上部饱和蒸汽时,蒸汽遇冷液化,系统内压力降低,当系统内压力过高达到安全阀组的阈值时,安全阀组将转换为开状态,系统内压力将迅速下降至设定值。
3 分数阶滑模变结构控制器
3.1 滑模变结构控制的理论
滑模变结构控制(SMC)与常规的控制算法不同,SMC控制是一种不连续的控制算法。在系统运行过程中,滑模控制的这种结构变化是有目的性在改变,而不是随意变化的。当系统偏离初始设定轨迹时,滑模控制会通过切换法则调节有目的使结构的改变让系统尽快恢复到目标轨迹上[6]。对于滑模的整个运动过程可以分为两个阶段,一是到达阶段,二是滑模段。其中到达阶段是指系统在完全不在滑模面上,系统将在有限时间内不断靠近切换面的过程;滑模段是指到达切换面在切换面上的运动过程,在该过程将表现出系统强抗干扰能力和鲁棒性。SMC控制的控制律通常有两部分组成,一是保证系统状态在滑模面上的等效控制ueq,二是保证系统状态不离开滑模面的切换控制uvs,该控制系统不受参数变化和外界干扰的影响,因此具有较强的鲁棒性,同时滑动模态的参数比较少,调节比较简单,因此被广泛应用[7]。但是SMC变结构控制的这种切换控制造成了系统的抖振。
3.1.1 等效控制
假如系统的被控对象为
x(n)=f(x,t)+bu(t)
(1)
跟踪误差向量
e=xd-x=[e,e′,…,e(n-1)]T
(2)
其中,xd为设定值输入信号。
切换函数设计为
s(x,t)=C1e=c1e+c2e′+…+e(n-1)
(3)
其中,切换矩阵C1=[c1,c2,…,cn-1,1]
取s′=0,则
s′(x,t)=c1e′+…+e(n)

(4)
等效控制器设计为

(5)
3.1.2 滑模控制
为了保证滑模到达条件的成立,即s(x,t)·s′(x,t)≤-η|s|,其中η>0,设计切换控制为指数趋近律
(6)
最终的滑模控制律为
u=ueq+uvs
(7)
定义Lyapunov函数
(8)
V′=ss′=s[-εsgns-ks]≤0
(9)
3.2 分数阶控制的理论
3.2.1 分数阶微积分定义
分数阶微积分是由整数阶微积分理论基础上发展而来,该理论将整数阶微积分的阶次不在看成是传统意义上的整数,二是将其延伸至分数或者是复数[8]。目前,工程上常用的定义有Grunwal-Letnikov定义、Riemann-Liouville定义和Caputo定义,其具体公式参考文献[9]。其中定义连续的分数阶微积分算子如下

(10)

3.2.2 分数阶微积分算子的近似与改进
由分数阶系统的定义可以知道,分数阶的阶次存在无限性,若要实现分数阶控制需要进行在有限的范围内进行近似。因此,本文采用了间接算法Oustaloup近似算法,其近似效果要优于其它算法[10]。其中Oustaloup滤波器在一个有限的频率段(wb,wh)内对微积分算子的近似为[7]
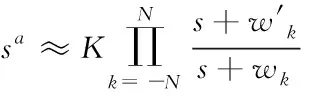
(11)
式中,wb,wh分别是Oustaloup滤波器近似频率范围的上下限;α为微积分的阶次;N为滤波器的阶次。
但是,由于Oustaloup近似算法在设定频率段(ωb,ωh)的上下限处并没有很明显的近似效果,计算结果无法使用,本文提出了改进Oustaloup近似算法,该算法是将分数阶算子用分数阶传递函数近似
(12)
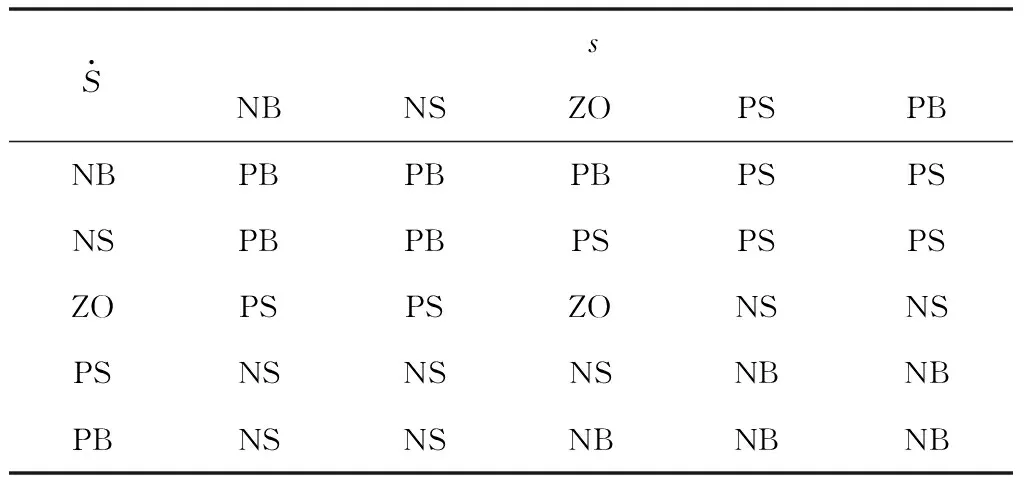
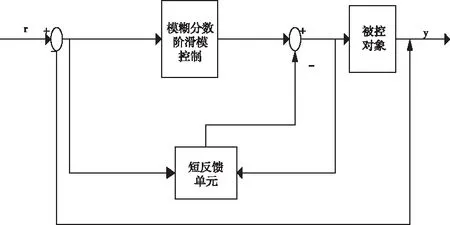
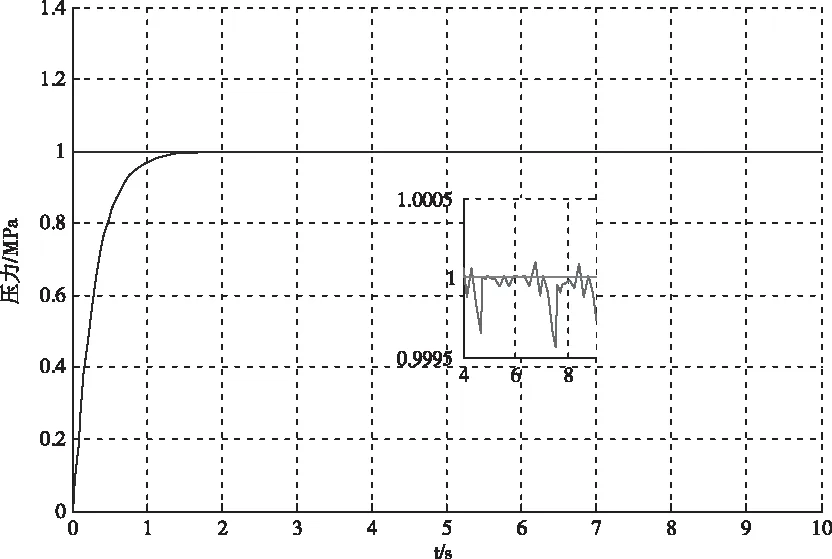
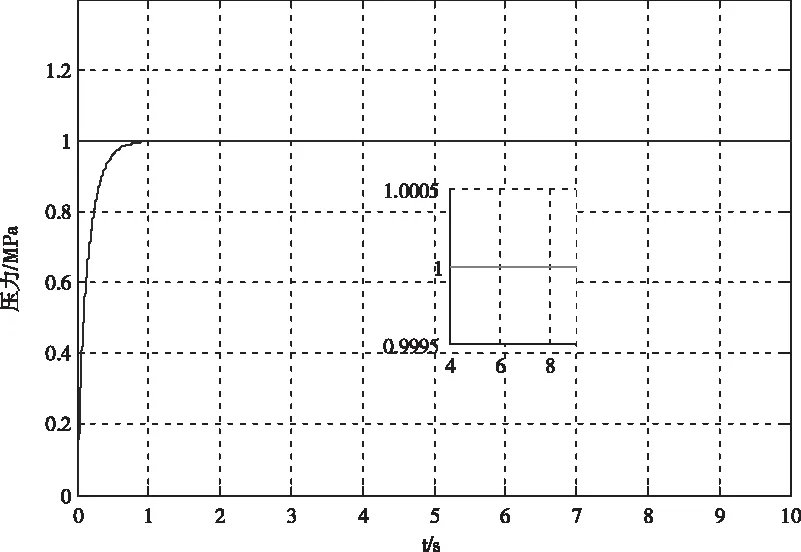
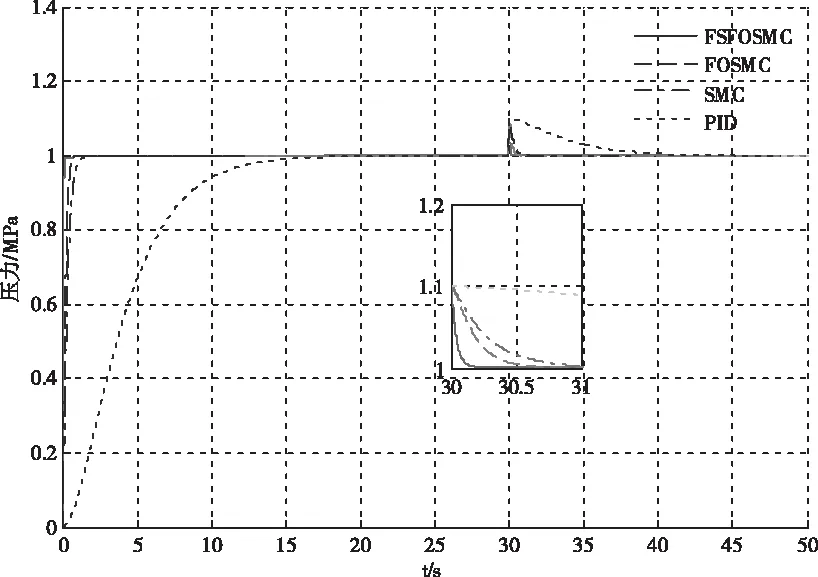
在频率段内wb (13) 综合上述公式可以得到如下微积分的近似公式 (14) 式中, 0<α<2;w为滤波器的近似频率;b、d为常数,均大于0。 滑模变结构控制因系统参数少、响应快,鲁棒性强而被广泛应用,但是由于其自身控制的特点也决定了SMC控制会给系统带来抖振现象,通过分数阶理论的分析可知,分数阶控制能够减弱这一现象[11]。为此,在滑模控制中引入分数阶控制既能够保留滑模控制的优点还能够克服滑模控制带来的抖振。针对分数阶滑模控制器的设计与传统的滑模控制类似分为两部分设计,一是分数阶滑模面,二是分数阶控制律。结合上面传统滑模控制器设计的基础上,本文设计的分数阶滑模面为 (15) 式中,C为滑模面增益,大于0;α为微积分的阶次。当α取值在(0,1)范围内表示微分作用,若取值在(-1,0)范围内表示积分作用。 对式(15)进行求导可得 (16) 分数阶滑模控制器利用了分数阶微积分的特性,即能够随着时间的变化进行衰减以及能量的传递进而能够明显减弱滑模变结构的带来的系统抖振[12]。分数阶滑模控制器通过选择恰当的分数阶阶次,能够改善系统的灵活性,提高系统控制精度。 结合传统滑模控制的几种控制律,本文选择指数趋近律。利用分数阶本身的特点,以及符号函数的特性,设计分数阶符号函数,在分数阶积分的作用下,大大削弱符号函数带来的抖振效果。为此,本文设计分数阶型指数趋近律 (17) 式中,β为微积分的阶次,ε为切换增益参数,k为趋近项增益参数。 图2 分数阶符号函数 当系统远离滑模面的时候,为了能够快速往滑模面运动,分数阶滑模与传统滑模控制一样,通过趋近项-ks决定,能够加快收敛的速度。当系统状态接近滑模面的时候,与传统滑模不同的是通过决定,由于分数阶对符号函数的作用,能够削弱系统抖振的作用。 针对分数阶指数趋近律参数ε的选择一般按照经验取值,该参数既影响系统趋近滑模面的速度同时也会造成系统的抖振,过大过小都会造成系统不良影响,参数值太大系统状态趋近速度将大大加快,但是也造成系统的严重抖振;过小将造成系统状态趋近滑模面的速度。为了避免参数选择的随意性和盲目性,实现参数的在线调整,为此引入了模糊控制来改变分数阶指数趋近律中的切换增益参数,当系统状态远离滑模面时,切换增益取大值,相反当系统状态靠近滑模面时,切换增益取较小值。其中,模糊控制控制不需要精确的数学模型,能用不精确的输入处理非线性问题,并且能比大多数非线性控制器可以获得良好的控制性能。 通过MATLAB软件设计模糊控制器,本文以系统状态变量s和微分作为二维模糊控制器的输入,ε作为模糊控制器的输出,其中,将系统状态s和其微分的基本论域为[-10,10],输出变量为切换增益ε的基本论域为[1,10]。对上面的输入、输出变量,将模糊子集定义为{NB、NS、ZO、PS、PB},分别对应{负大、负小、零、正小、正大}。针对以上输入输出的模糊变量的隶属度函数均选择为三角形类型,同时模糊控制中模糊规则的一般是在总结工程技术人员的技术知识和实际经验而建立的,其中切换增益模糊参数规则表如表1所示[13]: 表1 切换增益参数模糊规则表 短反馈算法是从神经内分泌激素调节中受到启发,与常规的反馈不同,短反馈是直接将控制器的输出反馈到控制器的本身,与控制器的输出进行叠加然后输出。系统框图如图3所示。 图3 模糊短反馈分数阶滑模控制系统框图 本文将模糊分数阶滑模控制器的输出的变化率Δuc(k)和误差信号作为算法的输入,然后在Farhy .L .S提出的神经内分泌激素调节的普遍规律对算法的输入变量进行运算处理,能够得到非线性反馈的函数[14] (18) 式中,a,n为算法系数,取值决定算法补偿的幅度;Δe(k)为误差增量;Δu(k) 为输出增量。 由上式(18)可知,短反馈算法是根据系统误差,误差增量以及输出增量来实时调整短反馈算法的输出,进而使系统往系统设定值方向进行改变。本文将以模糊分数阶滑模控制器的输出的变化率Δuc(k)当成算法的启动信号,进而模糊分数阶滑模控制器的输出u(k)为 u(k)=uc(k)-f(Δuc(k),e(k)) (19) 系统在实际运行中会受到各种各样不确定的因素干扰,为此,将短反馈算法的算法系数进行修正,以便更好地抗扰动。本文将系数a进行分段处理,来弱化算法对模糊分数阶滑模控制器带来的不良后果。a′的值如式(20)所示 (20) 式中,r为设定值。 某核电厂稳压器压力控制系统的数学模型为[15] (21) 利用Matlab仿真软件建立稳压器压力控制系统模型并进行仿真,图4为基于传统滑模控制的阶跃响应,由滑模控制本身的缺陷可知,系统由于不连续控制会出现抖振,通过图4局部放大图可知,传统的滑模控制在核电站稳压器压力控制系统中的抖振较为明显,针对核电这一特殊对象,系统在实际运行中能够希望平稳,为此引入分数阶以后,其控制系统的仿真结果如图5所示。由图5局部放大图可知,在分数阶微积分理论的作用下,系统抖振被消除了,同时控制系统的动静态性能也被改善了,为滑模控制在核电领域的应用提供了可能。 图4 基于传统滑模控制的阶跃响应 图5 基于分数阶滑模控制的阶跃响应 为了更直观的比较不同控制算法的控制性能,在同一个示波器上显示不同控制方法得到的仿真曲线。稳压器压力控制系统的仿真曲线如图6所示。 图6 系统单位阶跃响应曲线 针对核电站稳压器的压力控制系统,本文设计模糊短反馈分数阶滑模控制(FSFOSMC)、分数阶滑模控制(FOSMC)、滑模控制(SMC)以及传统的PID控制,由图6可以明显看出与其它控制方式相比,传统PID控制系统的控制性能最差,调节时间最长,而模糊短反馈分数阶滑模控制较其它控制相比,控制性能都得到了改善,上升时间、峰值时间等大大减小,稳态误差减小。同时为了比较算法的抗干扰能力,在时间为30s的时间加入幅值为0.1的阶跃扰动,模拟核电站运行中稳压器受到的不确定干扰,通过稳压器压力控制系统的实际仿真可以看出,模糊短反馈分数阶滑模在受到扰动后能够最快恢复到正常值,约0.3s左右。由此说明,模糊短反馈分数阶滑模控制不仅具有良好的动态性能,同时还具有较强的抗干扰能力。 针对复杂(时变、非线性及强干扰等)的核电站稳压器压力控制系统,将滑模控制、分数阶控制等理论融合,建立了一种带短反馈的模糊分数阶滑模双层反馈控制器,该控制器具有参数少、控制余度广、控制精度细等优点,与传统的PID控制对比,有效的解决了强干扰、非线性等问题。仿真结果表明,本文方法明显优于传统PID控制,可实现调节时间短、超调量小、响应速度快、控制精度高等优良的性能指标,具有较高的推广应用价值。
3.3 分数阶滑模控制器设计




4 模糊短反馈分数阶滑模变结构控制器设计
4.1 模糊分数阶滑模控制设计
4.2 短反馈算法


5 系统仿真

6 结论
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
舰船科学技术(2022年10期)2022-06-17
西部交通科技(2022年2期)2022-04-27
电机与控制学报(2019年10期)2019-12-03
速读·上旬(2019年2期)2019-10-21
网络空间安全(2019年8期)2019-03-18
成长·读写月刊(2018年8期)2018-08-30
求学·理科版(2018年6期)2018-07-09
中国科技教育(2016年3期)2016-04-21