基于数字孪生的六自由度工业机器人协同作业
2022-04-12 03:29:28邸志民钟相强范敬松
新乡学院学报 2022年3期
邸志民,钟相强,范敬松
(安徽工程大学 机械工程学院,安徽 芜湖 241000)
数字孪生技术是一种把制造业中物理世界和信息世界相互融合的技术,而工业机器人作为智能制造载体已经被广泛应用在各种不同的领域[1-2]。近年来,很多学者对工业机器人的虚拟调试进行了大量研究。中国科学院大学的祁若龙等[3]提出了一种基于VC平台实现机器人运动仿真与运动控制的方法,哈尔滨工业大学的郁万涛[4]基于Unity 3D虚拟现实引擎对托卡马克作业进行了研究,TIAN B.Y.等[5]对Kuka机器人手臂的路径跟随问题进行了研究。上述学者的研究虽然实现了场景漫游和人机主动交互,但仅仅停留在单边交互,未能实现产品在信息世界对物理世界的等价映射[6]。
本文旨在研究智能制造领域中数字孪生在工业机器人的应用,探索利用示教编程、Works Process组件、Python脚本3种建立数字孪生体的方法,以及工业机器人虚拟样机与物理样机间的通信方式,在制定加工方案时,将设备的数字孪生体贯穿于机器人加工产品的全生命周期过程。
1 六自由度工业机器人结构及参数
本文研究的六自由度工业机器人为埃夫特ER3A-C60,其末端执行器的有效负载为3 kg、定位精度为±0.02 mm,可完成产品装配、物料搬运、打磨等。ER3A-C60机器人运动简图如图1所示,相应的结构参数见表1,机器人的运动链由6个关节组成,均为转动副,各关节的转角用θk(k=1~6)表示,对应各机械臂长度用di(i=0~5)表示。
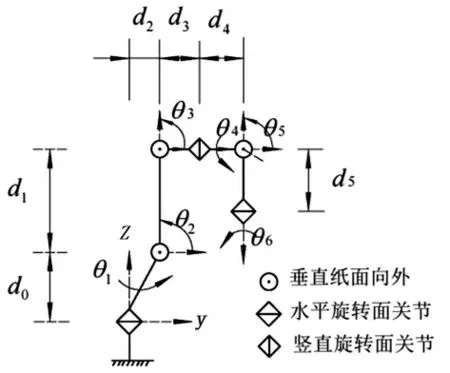
图1 ER3A-C60机器人的运动简图
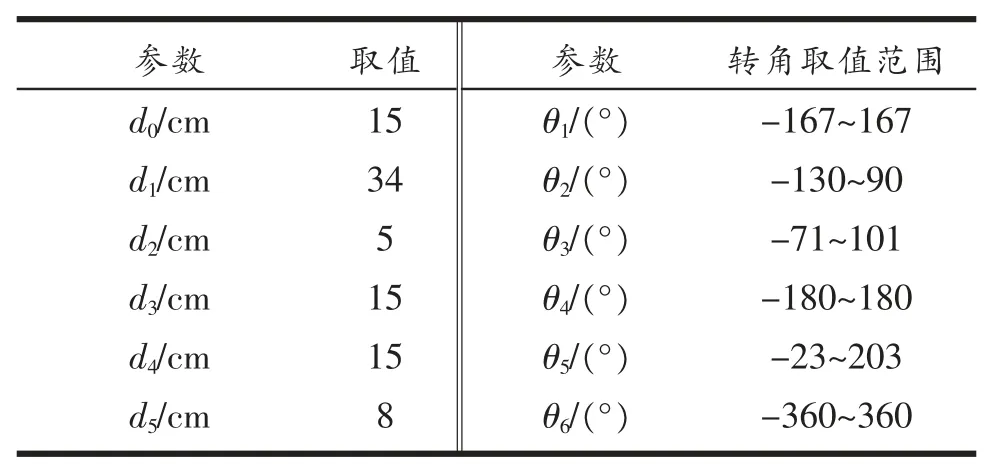
表1 机器人结构参数
2 六自由度工业机器人数字孪生体建模
数字孪生技术充分利用物理模型、运行历史等在虚拟空间中完成映射,从而反映相对应的实体装备的全生命周期过程。数字孪生技术概念模式如图2所示,数字孪生体作为实体装备在数字端的载体。本文采用的工业机器人数字孪生体建模方法为实现物理端与虚拟端的机器人的协同作业奠定了基础。

图2 数字孪生技术概念模型
2.1 工业机器人虚拟样机构建
基于SolidWorks建立ER3A-C60的三维数学模型,以step格式导入Visual One中,对机器人坐标参数进行设定以确定机器人的位置,对机器人各个关节坐标进行检查以确定各关节是否发生偏移,设置各关节的运动学属性,从而完成机器人虚拟样机(图3)的构建。

图3 工业机器人的虚拟样机
2.2 基于示教编程的工业机器人数字孪生体构建
示教器是工业机器人与操控人员进行交互的主要工具,通过示教器对机器人的点动、示教、直接编程等方式能够实现各关节运动的控制,通过TCP/IP协议与控制器进行数据交互,完成对控制器反馈信息的显示以及接口数据的传输。控制器接收操控人员发出的信号指令,对机器人进行相应的运动控制,包括对机器人运动轨迹的控制、各轴电机相关运动参数的调节[7-9]。
以抓取工件为例,将传送带、物料机等组件放置在机器人的工作范围内,对机器人的工作场景进行布局。首先定义机器人抓取、释放行为信号,通过“GripperTCP”进行匹配设置,并将各组件之间信号的逻辑关系进行连接,如图4所示。

图4 各组件间的信号逻辑关系
基于示教编程建立的孪生体及其子程序如图5所示。对机器人进行示教编程采取的是插点法,将机器人工作的全过程进行分解,每一步运动的信号指令作为一个程序发送给机器人,并控制机器人的每一次运动。
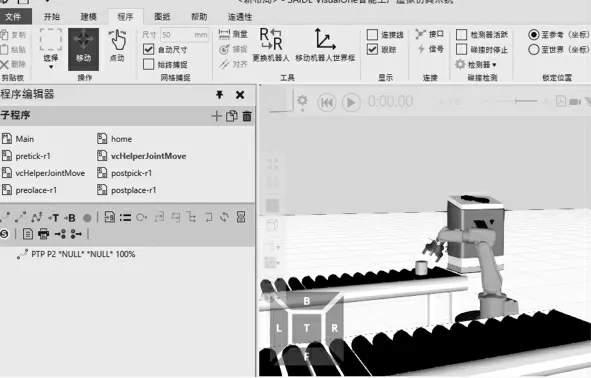
图5 基于示教编程的孪生体
2.3 基于Works Process的工业机器人数字孪生体构建
在Visual One中使用Works库中的Process组件创建一个连续作业任务、设定需执行的任务。在任务管理器中可设定和编辑多项任务,并按照在组件属性Inser New AfterLine中的排列顺序执行[10]。对机器人的工作空间范围进行设定,按照物理端机器人抓取产品的动作顺序,通过Process组件按顺序添加机器人抓取传送带上产品的步骤任务,实现机器人的抓取,完成数字孪生体的建立,如图6所示。

图6 基于Works Process的孪生体
2.4 基于Python脚本的工业机器人数字孪生体构建
基于Python脚本的工业机器人数字孪生体构建的工业机器人孪生体如图7所示。面对复杂的机器人装配、生产线的仿真,在Visual One中调用Python脚本,通过函数“getApplication”获取当前各组件位置,借助“graspComponent”函数实现机器人对工件的抓取,借助“linearMoveRel”、“jointMoveToPosition”等函数实现对工件的定位、运动路径和轨迹规划等行为动作控制,最后对设备进行复位,完成基于Python脚本的工业机器人数字孪生体的构建。
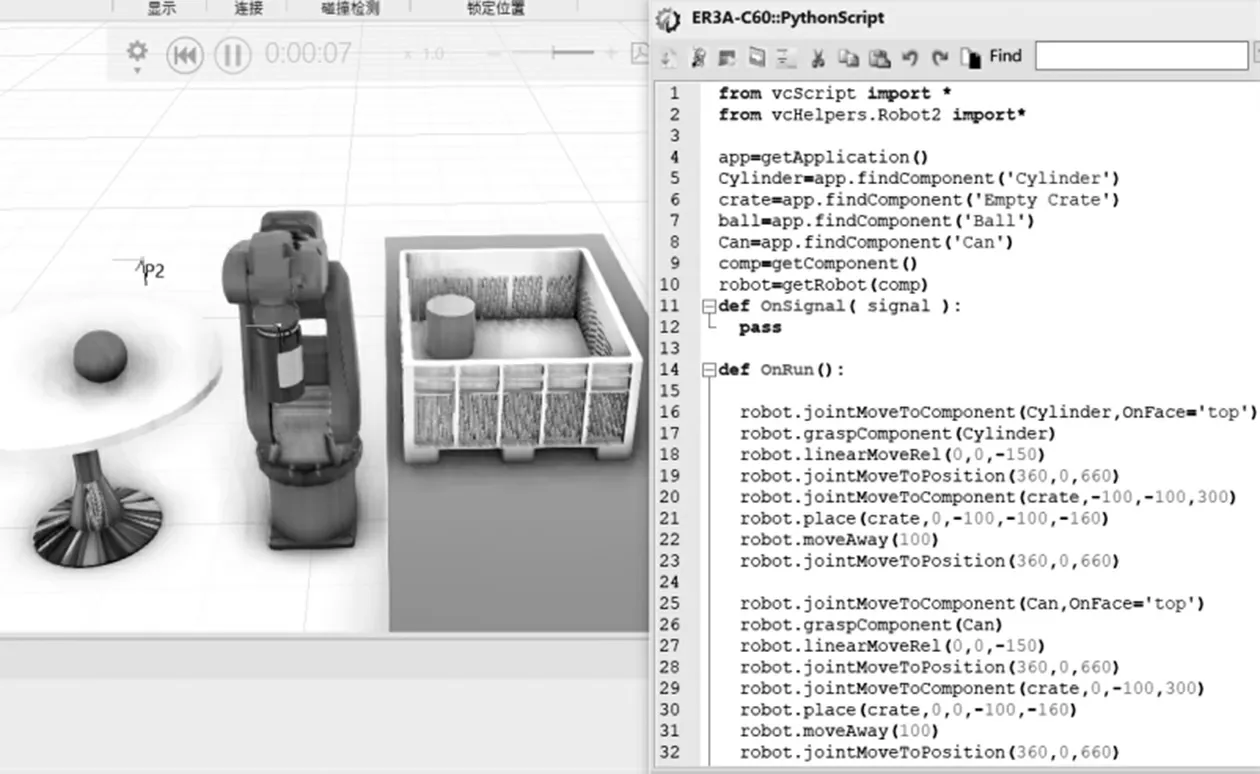
图7 Python编译孪生体
3 六自由度工业机器人虚实协同作业
3.1 工业机器人虚实间的通信构建
高时效性的数据交互是实现数字孪生体与物理实体数据交互的基础,采用Modbus TCP协议建立Visual One与ER3A-C60机器人的通信。通过网线、机器人、PC之间进行连接,在遵循类似ISO/OSI模型的基础上通过TCP/IP协议建立通信。通过TCP&UDP软件输入目标IP地址验证同一网段内PC与机器人连接情况,配置虚拟调试系统所需的虚实信号之间的数据通道。建立的机器人与计算机的TCP服务器如图8所示。

图8 机器人与计算机的TCP服务器
选取ER3A-C60机器人,通过工业以太网进行组网,将机器人与PC接入同一交换机中,通电后,在PC上对设备进行网络诊断(Ping),查看机器人与PC是否连通,如果连接成功则物理层准备完毕。随后通过KepServerEX软件,建立物理端与软件端的数据通道,对相应的目标机地址及虚实交互信号进行配置,完成基于数字孪生体信号接口连通。通过KepServerEX再次检查工控设备是否成功连接(图9),如果未连接成功,则检查设置的IP及端口是否正确。连接完成后,启动PC端的数据采集,同时运行孪生体连接和数据交互,完成工业机器人虚拟端和物理端的通信。
图9 Kep ServerEX连通性测试
3.2 工业机器人虚实协同实验
构建ER3A-C60机器人的虚实协同实验的试验台(图10)。首先,通过KepServerEX采集现场物理实体端的运动数据,当有数据更新时将更新后数据写入到数据服务器中,并通知虚拟端孪生模型,孪生模型调用接口实现数据流入,实现物理端与虚拟端的数据互通;其次,通过示教器对机器人进行操作,驱动机器人完成指定任务,同时查看Visual One中机器人孪生模型的行为数据和逻辑运行,观察数字孪生体工序执行任务与物理端机器人是否映射,若未按预期工艺路径执行,立即停止采集,查看出错工序对应的程序设计模块及信号配置,更改和优化后重新运行,直至数字孪生体能够按照预期完成任务,达到虚拟调式的目的。在所构建的实验平台上进行机器人虚实协同实验,实验结果表明:当操作者对机器人进行操作运动时,PC端数字孪生体的运动轨迹符合实验预期。

图10 ER3A-C60机器人的虚实协同试验台
4 结束语
本文探讨了工业机器人虚实交互技术中数据的实时传输、虚实间的实时交互问题,提出了一种基于数字孪生的机器人协同作业方法,完成了利用示教编程、Works Process组件、Python脚本对工业机器人数字孪生体的建模,并利用Visual One构建ER3AC60机器人数字孪生体与计算机通信方法,根据本文所提方法搭建了机器人虚实协同作业的实验平台,并进行了机器人虚实协同作业的实验。经实验验证,数字孪生能有效提高机器人运动过程的安全性和效率,数字孪生技术可以在机器人使用过程优化和全生命周期数字化管理中发挥更加重要的作用。本文可以为数字孪生技术在工业机器人领域的应用提供参考。参考文献:
[1] 陶飞,刘蔚然,刘检华,等.数字孪生及其应用探索[J].计算机集成制造系统,2018,24(1):1-18.
[2] 陶飞,程颖,程江峰,等.数字孪生车间信息物理融合理论与技术[J].计算机集成制造系统,2017,23(8):1603-1611.
[3] 祁若龙,周维佳,刘金国,等.VC平台下机器人虚拟运动控制及3D运动仿真的有效实现方法[J].机器人,2013,35(5):594-599.
[4] 郁万涛.面向托卡马克的维护机械臂作业研究[D].哈尔滨:哈尔滨工业大学,2015.
[5]TIAN B Y,XU Z,XIU L X,et al.Researches on virtual machining simulation of flexible manufacturing cell based on KUKA robot[J].Key engineering materi als,2014(3551):499-504.
[6] 吕佑龙,张洁.基于大数据的智慧工厂技术框架[J].计算机集成制造系统,2016,22(11):2691-2697.
[7] 刘检华,孙清超,程晖,等.产品装配技术的研究现状、技术内涵及发展趋势[J].机械工程学报,2018,54(11):2-28.
[8] 倪自强,王田苗,刘达.基于视觉引导的工业机器人示教编程系统[J].北京航空航天大学学报,2016,42(3):562-568.
[9] 贺玮,高贯斌,伞红军,等.SAIDE Visual One智能工厂虚拟仿真基础教程[M].长春,吉林大学出版社,2018:50-60.
猜你喜欢
能源工程(2022年2期)2022-05-23 13:51:50
少先队活动(2021年2期)2021-03-29 05:41:04
汽车维修与保养(2021年8期)2021-02-16 00:28:30
科学大众(2020年23期)2021-01-18 03:09:08
学生天地(2020年17期)2020-08-25 09:28:48
重型机械(2020年2期)2020-07-24 08:16:16
数学大王·低年级(2020年3期)2020-03-12 04:48:48
装备制造技术(2019年12期)2019-12-25 03:07:36
汽车观察(2019年2期)2019-03-15 06:00:50
中国卫生(2016年5期)2016-11-12 13:25:26