
基于模糊PID的爬楼轮椅后腿摆轮机构同步控制策略*
2022-04-12 08:37:44张谷玉曹东兴
传感器与微系统 2022年4期
张谷玉, 曹东兴
(河北工业大学 机械工程学院,天津 300130)
0 引 言
智能爬楼轮椅拓展了老年人及残疾人士的活动范围,为他/她们的生活提供了便利。但对于这种多机构协同工作的机电一体化系统,想要实现爬楼及越障功能,就要对每一部分设计一套精准的控制系统。爬楼轮椅后腿架上的摆轮机构,在运动过程需要具有同步性以及由于工作环境的变化所需要具有自适应的能力。本文控制任务是将后腿机构上的两个独立的摆轮机构调整到上位机下发的目标位置,在摆轮接触楼梯进行助推之前快速同步并同步运动实现助推功能。目前同步控制常采用比例—积分—微分(proportional integral differential,PID)控制或者模糊控制。传统PID控制精度较高,但存在控制参数难以整定、抗干扰能力差、调节时间长等缺点[1]。两个摆轮运行过程中受到扰动,其同步误差就会发生较大的变化,甚至导致控制系统的不稳定;使用模糊控制,可以避免传统PID控制参数整定复杂的弊端,抗干扰性和动态性能较好,提高同步控制的可靠性,但存在着稳态误差。不难发现,两者的控制优势是互补的,将两者有机结合起来,形成一种融合两者优点的同步控制策略——模糊PID控制系统。模糊PID控制响应时间短、超调量小、不仅具有良好的动态性能,而且具有比较理想的稳态品质[2]。利用该系统对摆轮位姿调节机构进行分段控制,当同步误差大于某个阈值时,采用模糊控制,以便提高系统的响应速度以及动态性能;而当误差小于某个阈值时,采用PID控制,以便消除静态误差,提高同步控制精度[3,4]。
1 摆轮机构的动作要求
1.1 摆轮机构作用分析
爬楼轮椅的摆轮机构主要在轮椅爬楼时启动,可以增大攀爬力,辅助轮椅完成爬楼,在爬楼过程中起着关键“助推”作用。两个独立的摆轮机构安装于后腿架上并由后腿电机提供动力。当后腿电机旋转时,如果离合器吸合,动力便通过齿轮组传递到摆轮机构上的曲柄,从而带动摆杆上的摆轮进行往复运动。在爬楼过程中,在避免与楼梯台阶碰撞的空闲时间内,将摆轮运动到不干涉爬楼运动的位置,以等待指令准备助推。当摆轮助推指令发出,摆轮便会与台阶的踏面接触,此时摆轮继续运动,就会对整个轮椅起到助推作用。在爬楼过程中,两个独立的摆轮机构需要保持高度同步,否则,整个轮椅便会发生侧倾,导致轮椅重心偏移。所以,需要设计一种摆轮同步控制系统,来保证两个摆轮在助推过程中的同步,从而避免了轮椅侧倾以及重心偏移的情况发生。
1.2 传感器安装位置
爬楼轮椅的摆轮机构,位于后腿架下方,后腿架与轮椅底盘通过四杆机构连接。其结构如图1所示。

图1 轮椅底盘机构简图
在爬楼过程中,整个底盘会沿着楼梯方向倾斜,固定在底盘上的后腿架以及摆轮机构都会发生相应角度的倾斜,如果控制摆轮所需要的角度以地平面为坐标系,会给控制系统设计增加负担,因此,这里采用了摆轮相对于底盘的角度作为控制系统反馈。在不同工况下,爬楼过程中想要精确控制摆轮机构,就需要得到摆轮相对于底盘的相对角度a,因为后腿架位姿也是可调节的,因此还需要得到后腿架相对于底盘的相对角度,所以,分别在底盘、后腿架以及摆轮上安装了3只数字角度传感器MMA8452,分别测量出底盘相对于水平地面的角度a1,后腿架相对于水平地面的角度a2以及摆轮相对于水平地面的角度a3。通过三者之间的关系就可以得到摆轮精确的相对位置a
a=180°-a1-a3
(1)
式中a为摆轮相对于底盘的角度,a1为底盘相对于水平地面的角度,a3为摆轮相对于水平地面的角度。可以看到a与a1,a3相关,而与后腿架相对于水平地面的角度a2无关,但为了实时得到后腿架的位姿角度,故后腿架上也安装了角度传感器。
2 摆轮控制系统硬件设计[5]
系统硬件部分主要由控制器、传感器模块、通信模块、步进电机模块等组成,具体的系统硬件组成框图如图2所示。其中控制器采用了TMS320F28335;而角度传感器选用了MMA8452数字式角度传感器,采用I2C通信协议;上位机通信采用RS—232异步串口通信。在摆轮位姿调节的机构中加入了离合器,这样就不会影响电机为后腿排轮提供动力;当摆轮运动到指定位置后也不需要电机停止,只需离合器断开。这样既方便了下一次位姿调节,同时也不影响后腿排轮的转动。
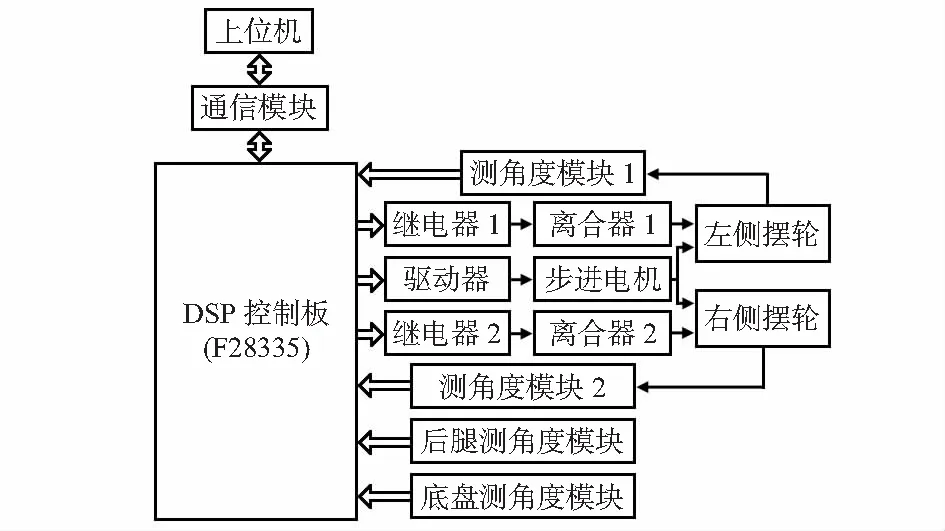
图2 系统硬件框图
3 摆轮位姿调节控制器设计
3.1 模糊PID控制策略
由于摆轮的动力是由后腿排轮电机提供的,电机动力通过齿轮组和两个独立离合器分别传输在两个独立摆轮机构的曲柄上,从而带动摆轮进行运动。在此过程中,设计一种Fuzzy-PID控制器可以对两个独立的摆轮进行精准的同步控制,并且将阈值角度设为3°。实际控制过程中只采用了Fuzzy-PI复合控制器,设计得到的控制系统框图如图3所示[6]。
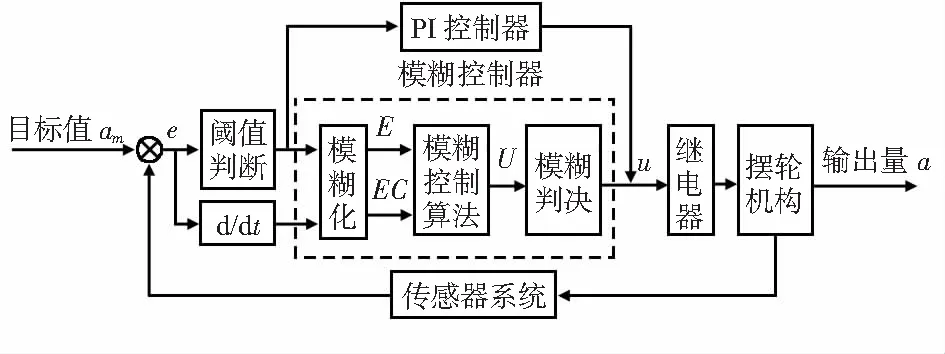
图3 摆轮机构 Fuzzy-PI系统框图
图3中控制器的输入变量为两只数字角度传感器之间实际差值a与两只数字角度传感器零差值之间的偏差,即与am=0之间的偏差e=a-am=a及其变化率e′;输出变量为两个离合器的闭合时间u。当偏差e的绝对值小于阈值时,控制器使用离散后的常规PID控制算法原理如式(2)
(2)
式中ki=kp×T/Ti为积分系数,kd=kp×Td/T为微分系数,T为采样周期[7]。
为了进一步提高积分项的运算精度,更好地消除静态误差,将式(2)中的矩形积分改为梯形积分[8],则最终的计算公式为

kd[e(k)-e(k-1)]
(3)
比例—积分(proportional-integral,PI)控制器采用了式(3)所示的原理,实际控制过程中参数kd为0,并且设置了积分限幅和输出限幅[7]。当偏差e的绝对值小于0.2°时,两侧离合器同时吸合,带动两侧摆轮同步运动。
3.2 模糊控制器设计
3.2.1 偏差模糊子集的隶属函数
摆轮机构最大运动范围角度差为95°,但考虑到摆轮机构在实际调节过程中两个摆轮之间不会有大幅度的偏差,将其偏差e的基本论域定为[-30°,+30°]便可满足实际需求。如果选定E的论域X={-6,-5,…,-0,+0,…,+5,+6},这样就可以得到偏差e的量化因子ke=6/30=0.2,其语言变量E选取8个语言值:{PB,PM,PS,PO,NO,NS,NM和NB}来分别表示偏差“正大,正中,正小,正零,负零,负小,负中,负大”。确定出其隶属度函数μ(x)和语言量变量E的赋值表,如表1所示。

表1 E的隶属度函数
3.2.2 偏差变化率模糊子集的隶属函数
实验过程中后腿排轮电机转速较慢且不变,为此摆轮运动速度也较慢,通常其偏差变化率维持在10°/s内,偏差变化率e′的范围为[-12°/s,12°/s],并且将该范围按每2°/s划分一个档位,这样就可以将偏差变化率e′的语言变量EC的论域定为Y={-6,-3,…,0,...,+3,+6},此时偏差变化率的量化因子ke′=6/12=0.5。EC的语言变量选{PB,PM,PS,O,NS,NM,NB}来分别表示偏差变化率EC“增加非常快,增加较快,增加略快,不变,减小略快,减小较快,减小非常快”[9]。确定出模糊子集{PB,…,NB}的隶属度函数μ(x),进而建立语言变量EC的赋值表,与表1类似。
3.2.3 输出量模糊子集的隶属函数
模糊控制器的输出量为两个离合器的吸合时间,将其分为6个档位,分别为(-900,-750,…,+750,+900)ms绝对值越大离合器吸合时间越长,数值前面的正负号分别代表左侧摆轮吸合和右侧摆轮吸合,这样便可以将其论域定为[-6,+6],输出量的比例因ku=900/6=150。选取其语言变量值为{PB,PM,PS,O,NS,NM,NB}来分别表示输出变量U“左侧摆轮离合器吸合时间长,左侧摆轮离合器吸合时间较长,左侧摆轮离合器吸合时间短,左右两侧摆轮离合器断开,右侧摆轮离合器吸合时间短,右侧摆轮离合器吸合时间较长,右侧摆轮离合器吸合时间长”。通过经验可以确定其模糊子集{PB,…,NB}的隶属度函数μ(x)和其语言变量U的赋值表,与表1类似。
3.3 模糊控制规则
如果左摆轮在前,右侧摆轮在后,此时规定偏差为正值,相反为负值。当偏差为负大,并且具有很大的增大趋势,则此时左侧摆轮离合器应该长时间吸合。此模糊规则表述为
ifE=NB andEC=PB thenU=PB
同理形成的56条控制语句,制成表格。如表2所示。
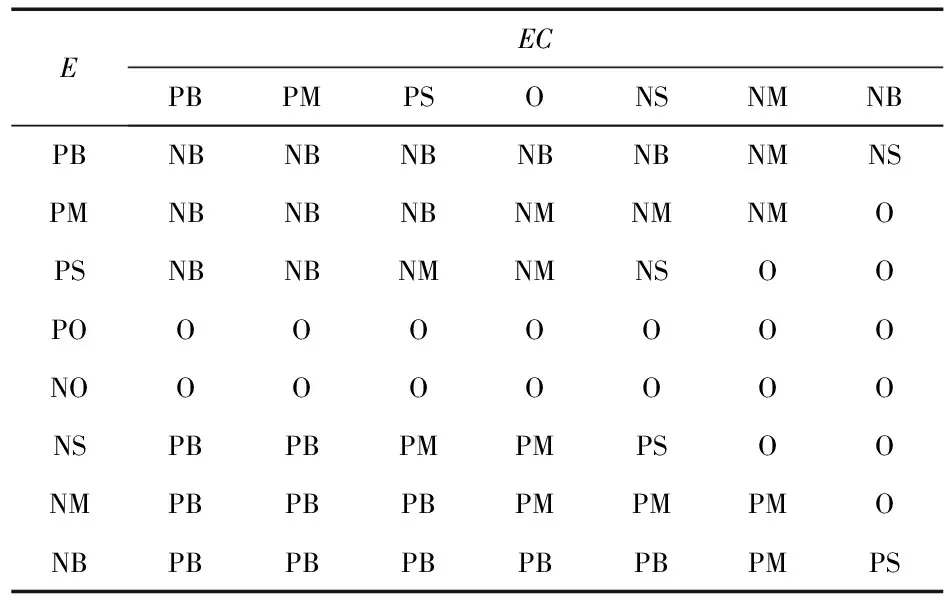
表2 U的模糊控制规则表
表2中每条控制规则之间通过“或”关系连接,可得到整个控制系统模糊控制规则的总模糊关系[6],即
(4)
3.4 解模糊与模糊控制表的制定
模糊规则输出的是一个模糊量,该量并不能直接控制离合器吸合时间,为此就需要通过模糊判决将其转换为一个精确量。常用的清晰化算法有最大隶属度法、重心法和加权平均法[9],本文应用重心法对模糊控制器输出解模糊,计算公式如式(5)所示
(5)
式中μN(xi)为隶属度。
根据系统规则算出模糊关系R,然后应用推理合成规则计算出相应情况下反应控制量变化的模糊集合Uij,接着采用式(5)对其进行模糊裁决得到模糊控制查询表,所得结果为小数的,还需要对其进行“取整”。最后将其存储在程序的数据空间,通过查表即可调用,这样既实现了模糊控制的离线,同时又提高了控制的实时性[9]。
4 控制系统测试与实验结果
4.1 系统测试流程
系统测试分为手动测试和自动测试。手动模式的目的是为了测试以及手动调节摆轮位置;而自动测试是通过上位机向下位机发送位置目标数据,然后下位机根据目标数据自动控制摆轮动作。整个测试程序的流程如图4所示。当上位机根据摆轮运动模型下发两个摆轮的目标位置后,下位机会将接收到的数据与传感器采集得到的实际角度进行对比,进而算出偏差及其变化率,然后通过模糊推理或者PI调节输出两个离合器应该吸合的时间,最终控制两个摆轮达到同步并运动到目标位置,实现助推功能。
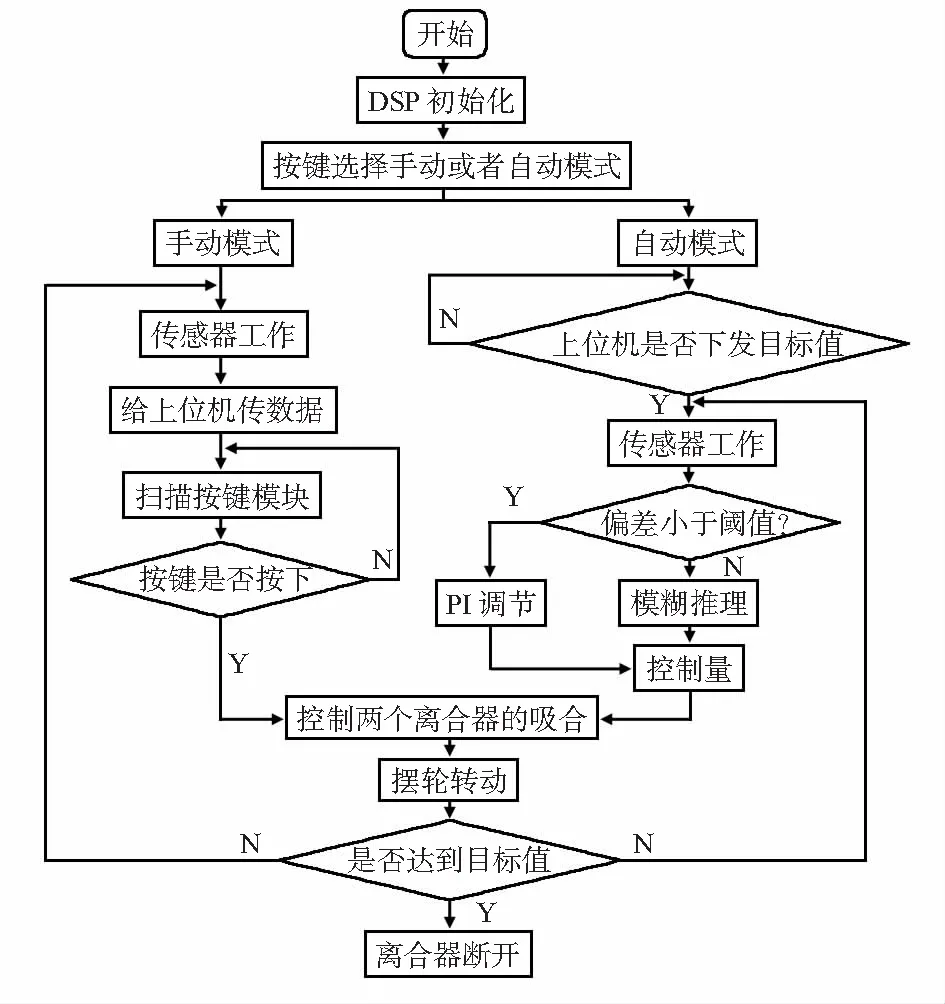
图4 测试程序流程图
4.2 实验结果与分析
图5为爬楼轮椅在爬楼测试过程中摆轮前摆和后摆时的两组数据。通过记录上位机监控界面的实时数据,分别绘制了三种不同控制策略下,两个摆轮后摆和前摆误差e的变化曲线。如图5(a),在两侧摆轮起始位置不同步的情况下后摆,上位机根据行为图向下位机发送两个摆轮的目标值,下位机上传传感器数据,此时显示两个摆轮相对于底盘的角度分别为82.26°和65.36°,相差16.9°。经过程序的自动控制,最终两个摆轮也同步到达了上位机下发的指定位置。
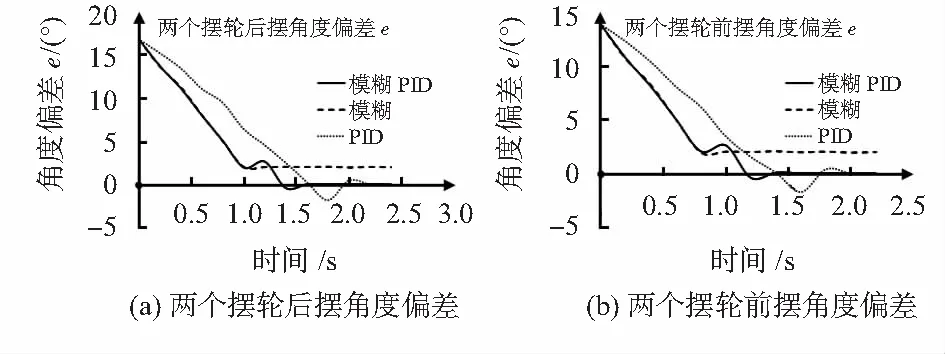
图5 实验测试曲线
通过分析图5(a)中三种控制策略下两个摆轮之间的偏差曲线可知,通过单一模糊控制器系统响应较快,时间最短,需要1.0s,但是最后会存在2.1°的静态误差,后续多次试验,发现模糊控制的静态误差在3°以内。这是因为模糊控制器是按档位处理的,而档位零对应的不是一个点,而是一个区间,当误差位于这个区间内,模糊控制器便认为已经达到要求。对于常规PID控制策略来说,需要2.2 s,而且在同步调节过程中,出现了超调量增大,动态性能较差,但是它的稳态误差很小。而对于Fuzzy-PID控制策略来说,系统响应速度介于前两者之间,需要1.6 s就可使两个摆轮达到同步并进行同步运动。具有较好的动态和静态性能,达到了控制要求。
图6为采用Fuzzy-PID控制策略时,两侧摆轮在起始位置不同步的情况下整个运动周期的一组数据曲线。
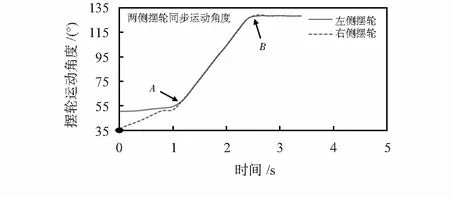
图6 实验测试曲线
如图6中,在起始位置时,左侧摆轮在前右侧摆轮在后并且相差13.92°,上位机发出助推指令,摆轮开始后摆运动,在A点两侧摆轮达到同步并继续运动准备进行助推,到达B点助推完成,此时两侧摆轮停止,到达目标位置,在避免与楼梯台阶碰撞的空闲时间内将摆轮进行前摆,到达起始位置。可以看到,在起始位置不同步的情况下,整个运动周期内两侧摆轮可以快速同步并保持同步达到目标位置,虽然在B点由于机械间隙等因素出现波动,但是B点并不在摆轮的助推有效行程内,不影响摆轮的助推工作,总体达到了控制要求。
5 结 论
为了满足爬楼轮椅后腿的两侧摆轮在爬楼助推过程中同步运动的要求。结合了常规PID控制策略和模糊控制策略的优点,设计了基于Fuzzy PID控制策略摆轮机构同步的调节控制系统,解决了两个独立摆轮同步问题。根据三种控制策略的实验比较,可以看出本文控制策略使系统具有较好的响应速度,动态性能和稳态误差优于传统PID控制和单一模糊控制,保证了双摆轮的同步要求,同时也适用于其他对同步有要求的情况。
猜你喜欢
祝您健康(2024年3期)2024-03-03 13:27:39
物流技术与应用(2021年7期)2021-08-11 02:44:14
科学与技术(2019年5期)2019-04-23 06:49:52
装备制造技术(2019年1期)2019-04-22 07:29:22
机械设计与制造(2018年2期)2018-03-05 12:33:02
青岛画报(2018年1期)2018-02-23 12:07:50
方圆(2017年24期)2018-01-17 20:55:33
课外生活(小学1-3年级)(2017年4期)2017-05-22 18:58:18
科技创新与应用(2016年8期)2016-10-21 21:37:27
中国卫生(2015年6期)2015-11-08 12:02:50
