
反射式ADB模组的光学设计
2022-04-12 07:07于存胜姚红兵黄立敏杨夏军吕万育
电子科技 2022年4期
于存胜,姚红兵,黄立敏,杨夏军,吕万育
(1.江苏大学 机械工程学院,江苏 镇江 212013; 2.河海大学 理学院,江苏 南京 210098; 3.常州星宇车灯股份有限公司,江苏 常州 213000)
随着我国个人汽车保有量逐年逐渐提升,夜间汽车行驶的安全问题也变得日益突出。传统的远光光学系统出射的远光光束呈静态分布,照明条件太过单一且需要手动切换,不能满足夜间复杂道路条件下的行车安全需要。自适应远光系统(Adaptive Driving Beam,ADB)可以通过单个LED的停用或调暗,有选择地遮蔽其他道路使用者占据的远光露出空间,有效解决了传统远光开启时产生的眩目效应。相较于传统远光光学系统,拥有ADB光学系统的车辆不仅能够给驾驶员带来更好的视觉效果,还能够改善驾乘体验,减少夜间交通事故发生概率[1-2]。
基于ADB光学系统独有的特点,本文提出了一种以数颗LED作为光源的反射式ADB光学模组。该光学模组的组成包括多颗LED光源、自由曲面、灯板和散热器。该方法以非成像理论为基础,先将所需目标照度面进行划区域处理,同时建立出射光线与各基础配光区的对应坐标关系,然后结合折反射定律依次计算出各自由曲上的离散点坐标。该方法合理地划分远光光型分布区域和基础反射面,调整并优化了各子块的面型数据,实现了远光法规的配光要求。
1 ADB配光标准
目前关于LED前照灯远光法规主要包括GB 25 991-2010《汽车用LED前照》、GB/T30036-2013《汽车用自适应前照明系统》。由于对自适应前照灯的测试评价方法的研究还不够成熟,目前关于ADB照明系统并没有明确的法规测试标准[3],只有在最新版本的欧洲汽车技术法规ECE R48《关于在照明和光信号装置安装方面对机动车辆进行认证的统一规定》和ECE R123《关于批准装有汽车自适应前照明系统的统一规定》中,对自适应远光系统设置了明确的规定和具体的测试方法要求[4-5]。
ECE R123中对于ADB的法规测试分为系统最大激活条件和自适应阶段两种模式。当其工作系统在最大激活条件(LED光源全部点亮)模式时,只需满足前照灯法规中对普通远光光束的配光要求即可。当工作在自适应阶段模式时,则需要满足下表的配光法规要求[6]。根据我国实际道路行驶规则,ECE R123中对右行驾驶的要求法规如表1所示。

表1 自适应远光配光测试标准要求Table 1. Standard requirements for adaptive high beam distribution test
2 反射面设计及配光分析
2.1 划分基础反射子块与分段设计
由ADB工作原理可知,为合理使用远光灯,避免对对向驾驶员产生眩目效果,ADB模组的主要工作模式为:通过各个基础反射面出射光型的相互叠加来变换形成各种不同亮暗组合的远光光型。本设计采用左右侧ADB模组,共使用2×2颗4芯片LED。在单独远光的基础上,将远光分布区域-15.2°~15.2°划分为16个基础分区。左侧ADB模组实现的分区范围为-15.2°~6.4°,共涉及8个分区,左右侧模组光型分区为镜像关系,每颗LED芯片对应的远光分布范围如表2所示。为实现上述远光配光要求,保证光型叠加后的均匀性,单个ADB模组内设有2个基础反射面共15个子块,分为上下两行,如图1所示。上述反射面子块主要是将LED出射的光线进一步收集,并使之有序反射成具有一定扩散角度的出射光线,以实现精细照明[6-7]。
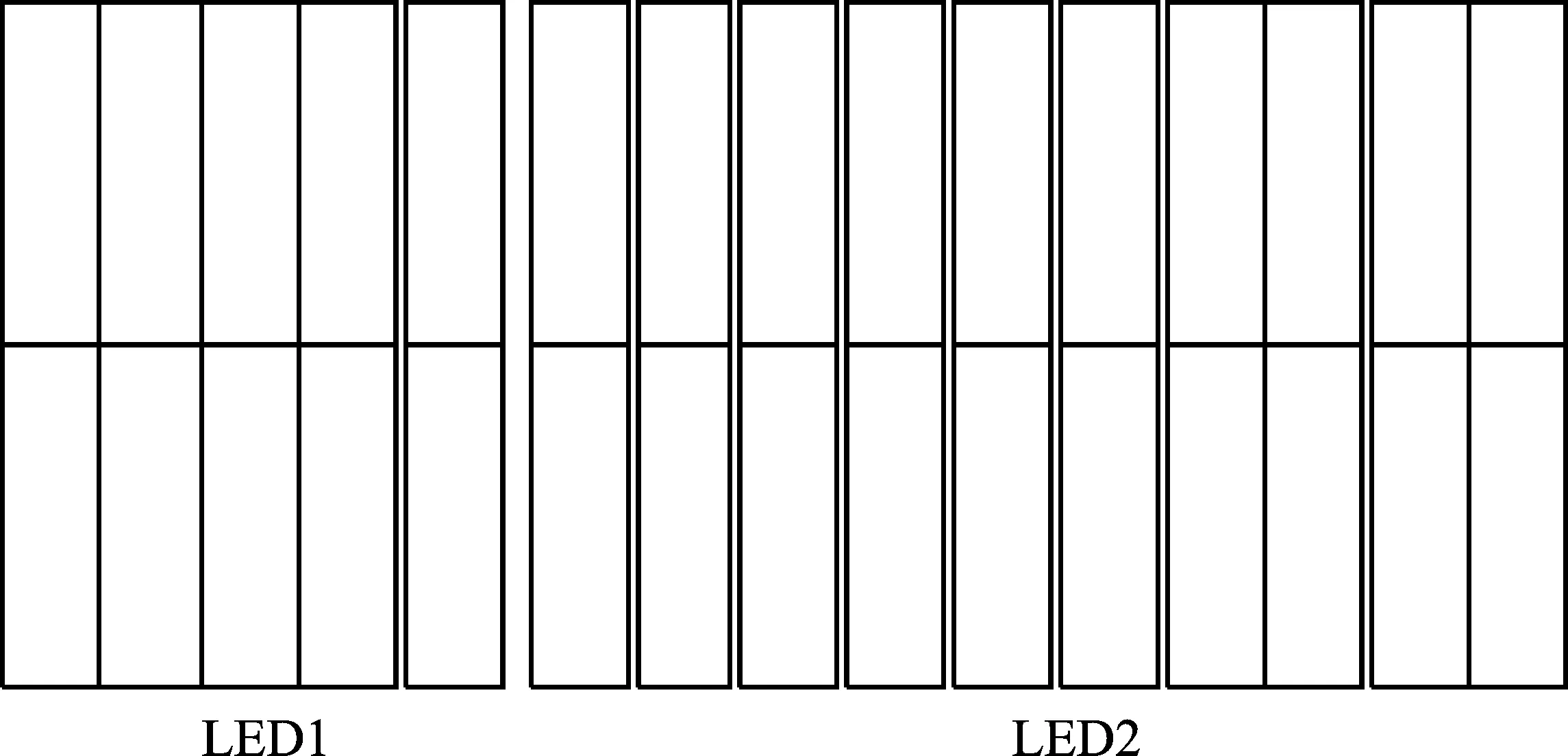
图1 基础反射面的划分Figure 1. Division of the base reflecting surface
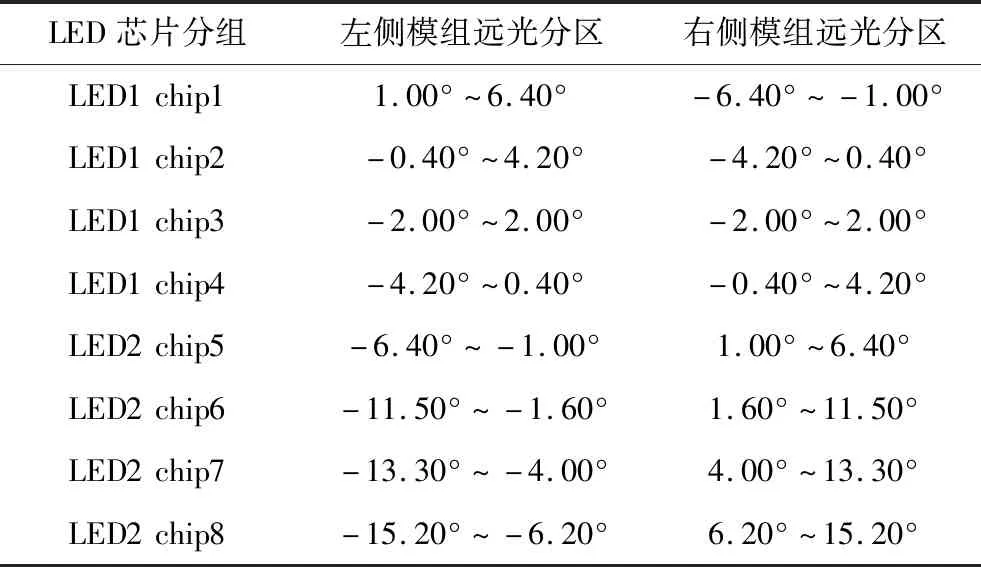
表2 远光分布区域的划分Table 2. Division of high beam distribution area
2.2 自由曲面反射面设计基础
自由曲面的求取分为以下步骤:利用能量守恒和折射定律,建立入射光线和出射光线的映射关系;然后利用给定的边界条件和所有已知曲率关系来求取对应的离散点;最后将离散点拟合成所求自由曲面。
以LED光源发光点作为原点,建立二维平面坐标系,以LED光线出射方向作为Z轴,如图2所示,其折反射定律的矢量形式表达式为
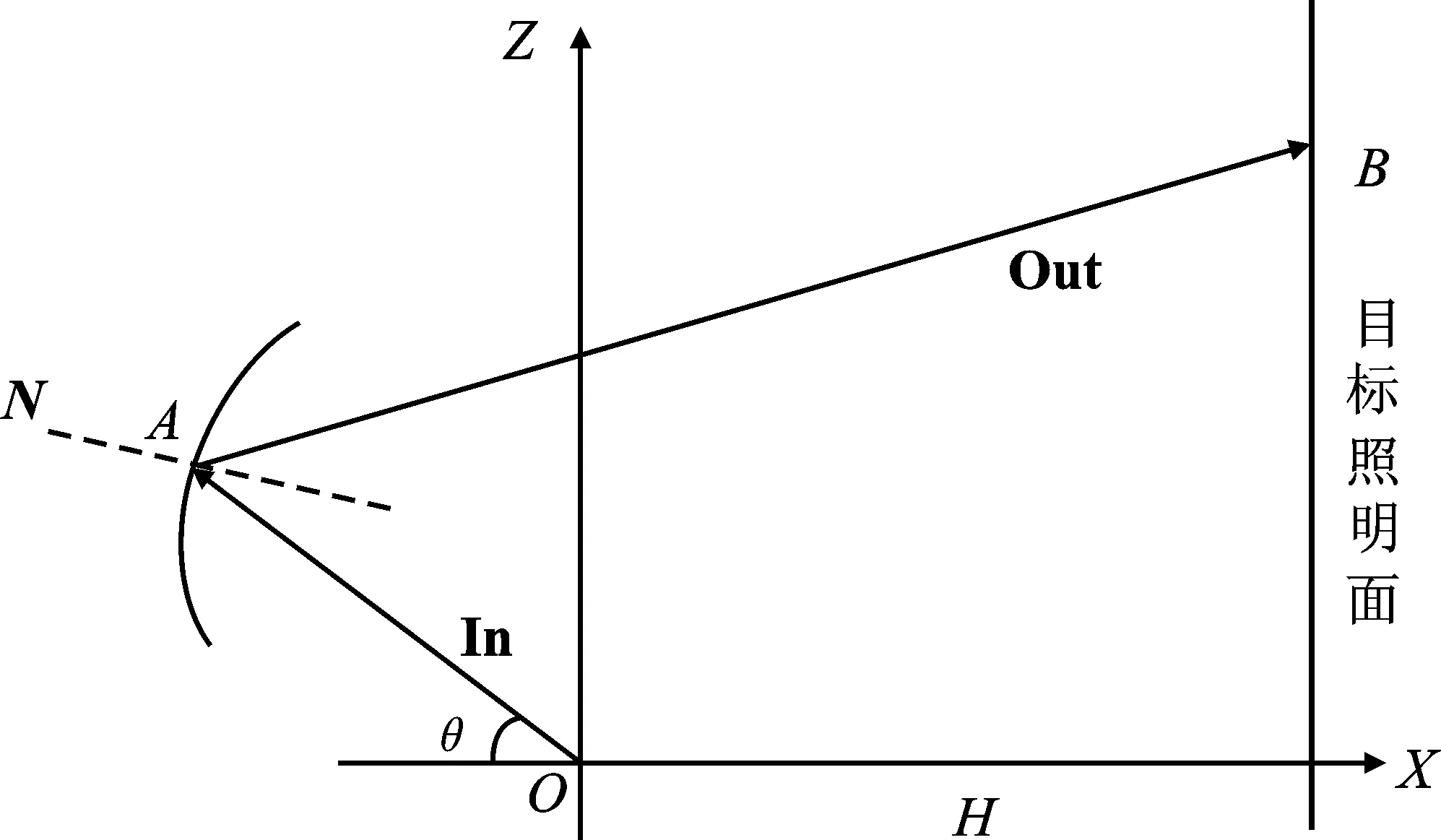
图2 入射光线和出射光线的几何关系Figure 2. Geometric relationship between incident light and outgoing light
(1)
式中,In、Out、N均为二维坐标向量形式,In和Out分别为入射光线和出射光线的单位矢量形式;N为自由曲面在某一点的单位法向量;n为自由曲面外部介质折射率。
在对自由曲面发射面上的离散点求解时,假设θ(i)是LED发射一条出射光线与X轴的夹角,该出射光线和自由曲面反射面的交点为A点,经自由曲面反射后与目标照明面的交点为B点,其中LED光源的位置到目标照明面的距离为H,则入射光线的单位向量In的矢量表达式为[8]
In=(cosθ(i),sinθ(i))
(2)
出射光线的单位向量Out的矢量表达式为
(3)
式中,z′(i)为目标照明面上的横坐标。
结合折反射定律,当n=1时,求得自由曲面上一点A点单位法向量N(a,b)[9]为
(4)

在以上求解过程中,计算出LED出射光线与自由反射面初始交点A0处的单位法向量N0。由关系式N·T= 0可求出该点处的切向量方程T0。联立以上切线方程和LED下一条出射光线方程得到下一点A1。依次不断进行数值迭代即可求出自由反射面上的所有离散点坐标[10],然后将各离散点输入到3D建模软件中进行反射面的拟合。拟合后得到的各子块自由曲面组合,如图3所示。
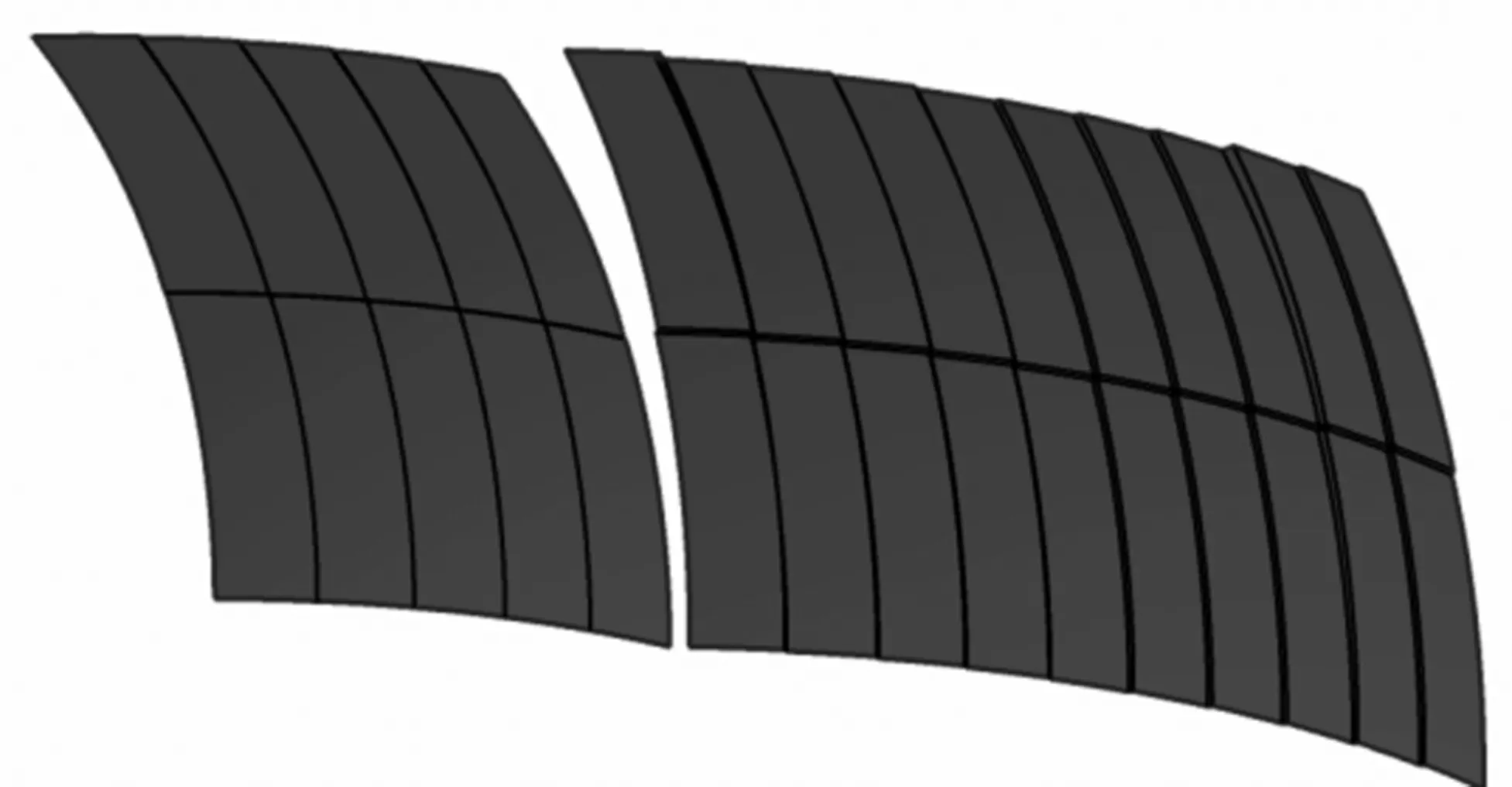
图3 各子块自由曲面组合Figure 3. Free-form surface combination of each sub-block
不断地对自由曲面反射面参数进行优化,直至在25 m远处配光屏幕上远光照度的光型分布达到所需设计要求。然后将优化后得到的各光学自由曲面子块与其他整灯部件进行组合,最终形成的ADB自由曲面装配实体,如图4所示。
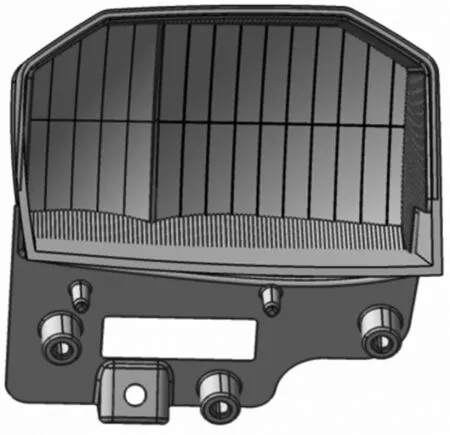
图4 建模实体图Figure 4. Modeling entity diagram
2.3 设计结果模拟分析
合理选择LED光源是车灯设计的重要组成部分,应着重从光效、封装热阻、色温、寿命等方面考虑。光源应选择封装热阻低并且光效高的LED芯片,同时在一定的环境温度下LED光电参数应趋于稳定一致,色温在4 700 K附近,光强衰减不应大于20%[11]。
本文设计选用OSRAM OSLON Black Flat S系列,型号为KW HKL531,光通量选用960 lm,光色为白色且色度特性符合GB4785的规定,发光角度典型值为120°,最大结温为150 ℃,正常工作的温度范围为-40~125 ℃。由于采用了特殊的封装技术,使其发光面尺寸仅为1.03 mm×1.03 mm,给自由反射面设计留有较大的灵活度,更有利于精简ADB模组整体结构尺寸。
当该系统处于最大激活条件,LED光源全部工作时,单个左侧ADB模组远光光型模拟结果如图5所示。
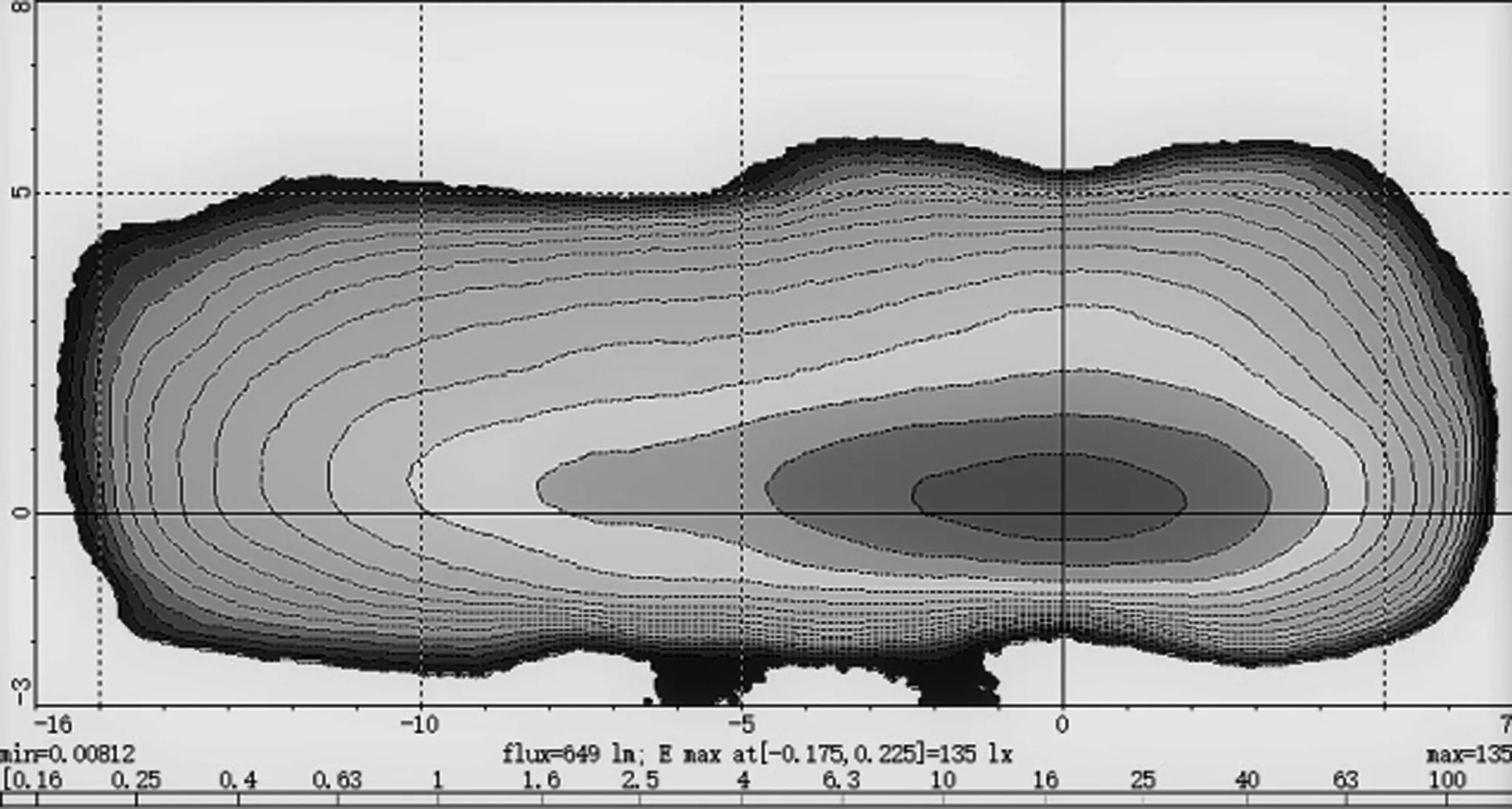
图5 最大激活条件下的模拟光分布图Figure 5. Simulated light distribution map under maximum activation conditions
由图5可以看出,该ADB模组光学系统的效率为33.8%,接收屏幕上的最大照度为135 lx,横向角度展宽为23°,纵向角度展宽为8.5°。该结果不仅符合远光法规对光型分布宽度要求,也提供了较高的中心照度数值,满足了夜间行车对视野范围和路面照度的需要。
利用Lucidshape法规判定模块LID Measure Test Table自动检测各测试点具体法规数值,各测试点具体数值如表3所示。

表3 各测试点模拟照度值Table 3. Simulated illumination value of each test point
由表3可以看出,模拟得到的各测试点数值均符合远光法规要求,验证了自由曲设计的可行性。
当该系统处于自适应模式时,通过单个不同LED芯片的停用或调暗,可以形成不少于20种的亮暗分布模式。以下给出一种自适应模式下芯片亮灭组合方式,当LED芯片chip5、chip6、chip7停用时,该系统在这种亮暗模式下光型和亮度分布如图6和图7所示。

图6 一种自适应模式下的模拟光分布图Figure 6. Simulated light distribution map in an adaptive mode
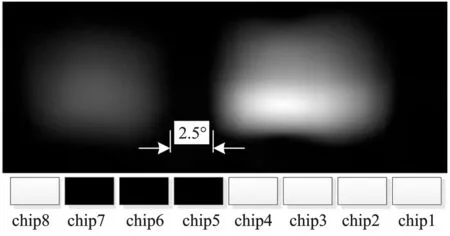
图7 一种自适应模式下的模拟亮度分布图Figure 7. Simulated brightness map in an adaptive mode
由图6和图7可以看出,当ADB系统工作在此自适应模式下时,亮度图中间形成一个宽度约2.5°的暗区。两车相会时,此暗区的形成能有效避免对对向驾驶员造成眩光刺激,且不影响驾驶员行车道路方向其他区域的照明视野,能较大程度改善驾驶员的夜间驾驶体验。
3 样件加工及配光测试
汽车照明光学元件一般都是由复杂、无轴对称的异性自由曲面拼接形成,拼接面之间不可避免地会存在一些尖锐的棱角,因此传统的切削和抛光工艺已经很难保证自由曲面面形的精度[12]。目前常用多轴超精密金刚石铣削来加工自由曲面光学元件,并通过标准工件对所建立的刀具误差模型进行验证,不断降低自由曲面光学元件加工误差,去除以上加工方式所产生的不利性刀纹。将加工完成后的光学元件,进行抛光镀铝处理,以提高反射面的反射率,增大系统光效[13-14]。加工完成后的样件实体如图8所示。

图8 ADB模组样件正视图Figure 8. ADB module prototype front view
ADB模组实物加工完成后,一般采用三坐标测量机来测试自由曲面的加工精度。三坐标测量机的工作原理为:通过高精度测头感应器沿着样件表面进行逐点运动,将探针的受力的大小和方向经模数转换变成空间三维坐标点,并在三维软件中构建测试出的面形。通过对比测试面形与设计面形的误差,为后续面形的优化和修改提供方案[15-16]。
如图9所示,本文使用型号为GO-HD5的国产远方配光机对实际加工出来的反射式ADB模组进行光型扫描测试[17]。该装置转台转角精度可以达到±0.01°,25 m处探头精度达到0.01 lx 。

图9 旋转测试法对各测试点测量Figure 9. Rotate test method to measure each test point
通过以上配光机扫描后,得到ADB模组实物光型图及各个测试点法规值[18-19]。当ADB模组处于最大激活条件(LED光源全部点亮)时,该模组实测光学系统的效率为34.3%,接收屏幕上的最大照度为134 lx,如图10和表4所示。排除测量仪器和实际加工的相对误差,实际测得的光型仍能满足远光灯法规要求。
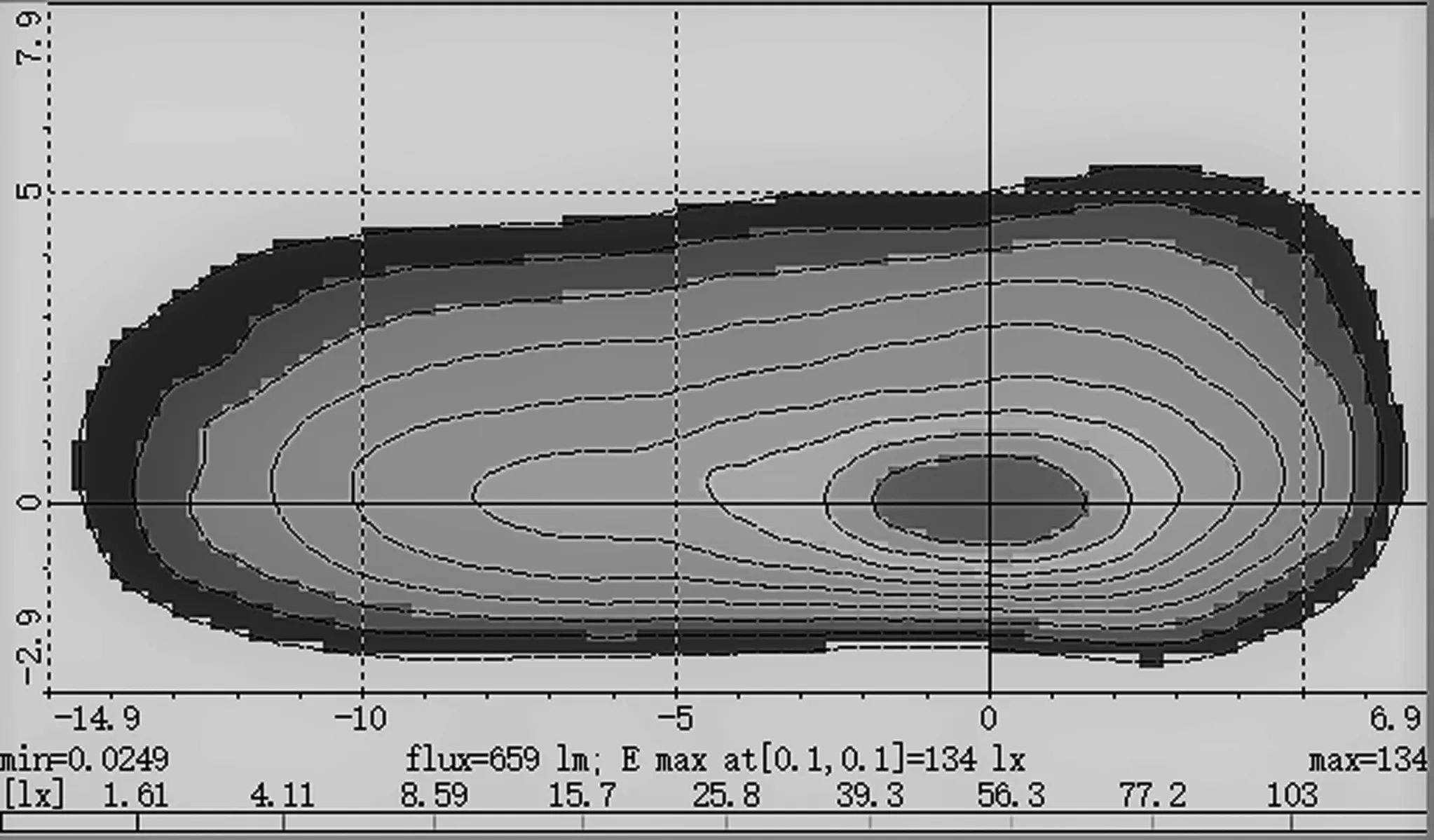
图10 最大激活条件下的实测光分布图Figure 10. Actual light distribution map under maximum activation conditions
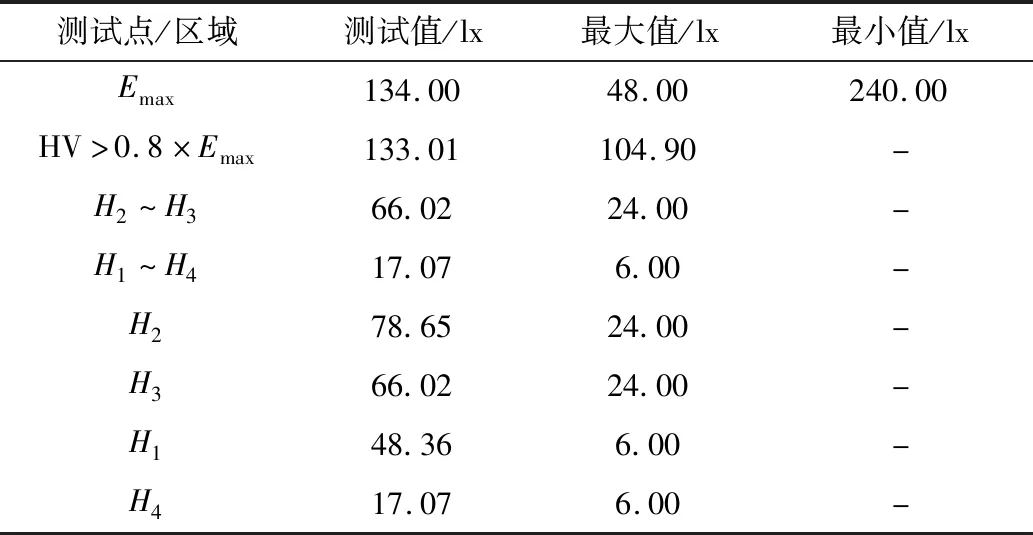
表4 实际测试点照度值Table 4. Illumination value of actual test point
由图10表4和可以看出,实际样件ADB模组光学系统的效率为33.4%,接收屏幕上的最大照度为134 lx,实际测试横向角度展宽为22°,纵向角度展宽为7°。各测试点数值均符合远光法规要求,光分布宽度及效率与模拟测试结果基本保持一致,表明实际产品能够为驾驶人员提供良好的行车照明条件。
当该系统处于自适应模式,并且LED芯片chip5、chip6、chip7停用时,实际测试得到的光型和亮度分布如图11和图12所示。
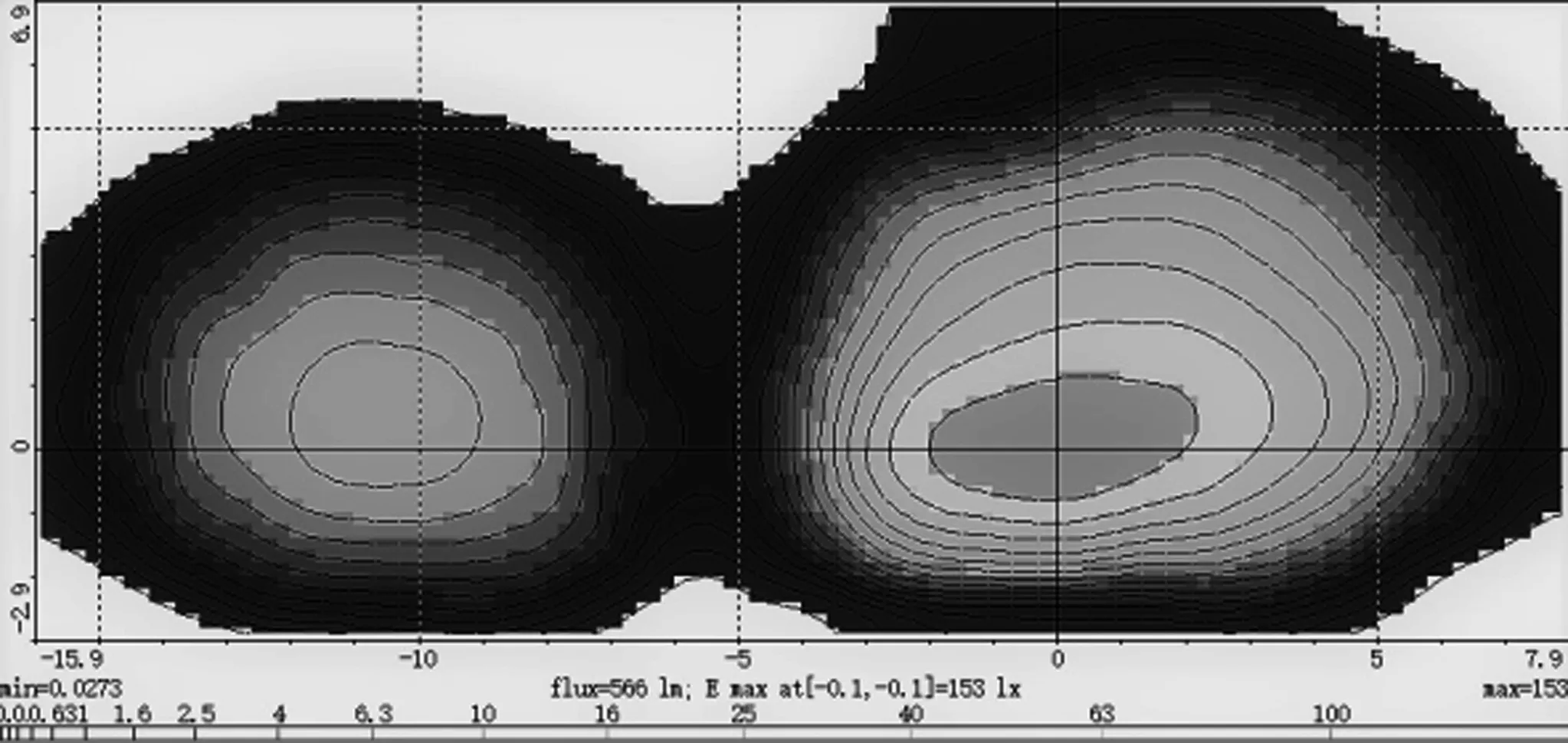
图11 一种自适应模式下的实测光分布图Figure 11. Actual light distribution map in an adaptive mode
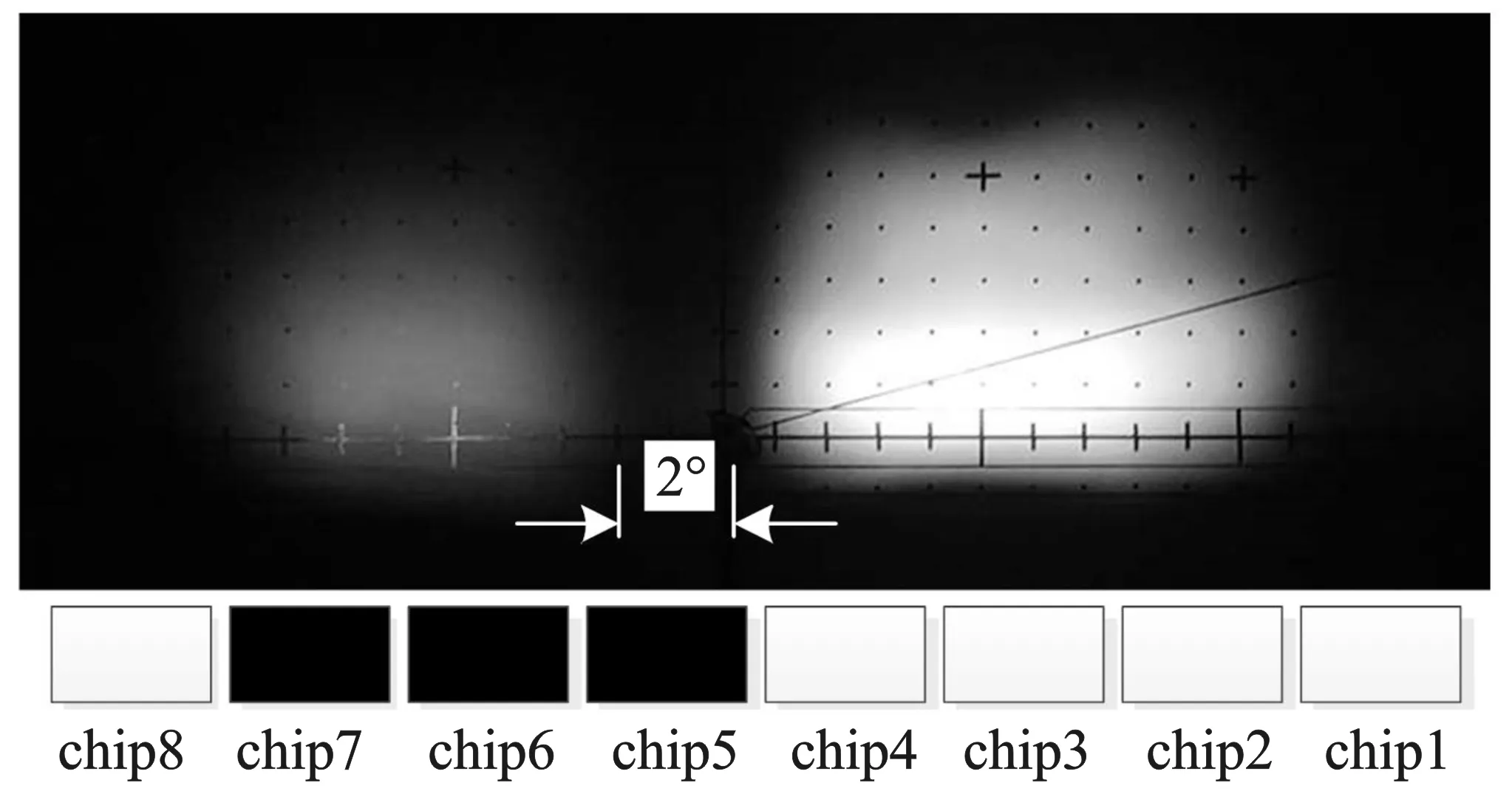
图12 一种自适应模式下的实测亮度分布图Figure 12. Actual brightness map in an adaptive mode
由图11和图12可以看出,当ADB系统工作在此自适应模式下实际点亮时,配光屏幕左侧形成一个宽度约2°的暗区,实际点亮和模拟得到的亮斑分布情况一致,证明产品设计达到了预期效果。
4 结束语
本文基于折反射定律和非成像光学理论,设计了一种通过单个LED停用或调暗以形成无眩光区域的反射式ADB模组。在LED最大激活条件下,该模组实物的有效光利用率达到33.4%,各测试点数值均符合远光法规要求。在自适应模式下,该模组也能通过LED停用形成数种亮暗光斑的组合,在夜间会车时,能有效避免对对向驾驶员产生眩光刺激,改善驾乘体验,减少夜间交通事故的发生率。
猜你喜欢
空间电子技术(2022年3期)2022-08-09
航天电子对抗(2021年5期)2021-11-30
科学与生活(2021年14期)2021-09-10
航天器环境工程(2021年2期)2021-05-12
科技视界(2020年19期)2020-07-30
智富时代(2019年8期)2019-09-23
智富时代(2019年8期)2019-09-23
卷宗(2017年16期)2017-08-30
