
基于仿人类思维的骨科机器人核心架构设计与实现
2022-04-11 23:48作者杨辉胡凯夏建松朱文武杨挺
中国医疗器械杂志 2022年2期
【作者】杨辉,胡凯,夏建松,朱文武,杨挺
浙江省医疗器械审评中心,杭州市,310009
0 引言
人工智能是机器对人类思维的信息过程的模拟,是人的智能的物化[1]。手术机器人是人工智能技术在医疗领域应用的典型代表,也是人工智能技术最早被应用于实践过程的领域之一,仿人类思维机器人是高度智能化的机器人,是人工智能发展到目前的一个最新阶段。骨科疾病是现代社会的常见病和多发病,需要手术治疗的骨科疾病日益增多,而传统骨科手术受制于医生经验和术中影像设备,存在手术风险高、内植物植入精度低、复杂术式难普及、智能设备匮乏等不足,这些会带来骨科手术创伤大、并发症多等问题。有研究报道,在传统骨科手术中,徒手放置螺钉导致的椎弓根破坏率为3%~54.7%[2-5],螺钉错位相关的并发症,包括神经损伤,发生在0~7%的患者中[2]。因此临床亟需新的治疗理念、手段和设备来满足治疗骨科疾病的需求,骨科机器人以其微创、精准的特点为骨科疾病治疗与相关研究提供了更加智能化、精准化的方案,是当前骨科临床治疗发展的一个重要方向。
然而,传统用的骨科手术机器人还是存在一些弊端,例如手术过程中医疗机器人对患者进行操作时,机器人与患者的相对位置可能并不是恒定的,机器人操作过程中患者会发生微动导致手术操作的不准确[6];术前基于图像或基于CT的计算机导航系统已被引入指导椎弓根螺钉的置入,但系统的失败率仍然可高达8.5%~11%不等[7-8]。最近发展的术中CT导航被认为可以提高仰卧位患者螺钉置入的准确性,然而,胸腰段和骶骨椎弓根穿孔的发生率仍为3.2%~4.8%[9-10]。影像漂移即手术进行中组织结构移位导致导航系统影像与真实位置的误差,大多数骨科机器人的导航系统会产生“漂移”现象,这也是导航系统最大的弊病,发生率可高达66%[11];学习曲线不一,手术配准过程不能无创配准等问题均限制了骨科手术机器人的进一步应用[12]。而且传统的手术机器人在手术过程中,是在手术视觉下,由医生通过对手术空间的坐标和视觉坐标进行不断的配准以纠正手术动作,在狭小的手术空间里,依靠人的手眼协调,完成手术定位和手术过程,该过程缺乏医生思维过程,会出现二次损伤或操作不准确的情况[13],基于以上问题的存在,我们提出了一种创新性的仿人类思维机器人,根据功能分为脑、眼、手三大模块,机器人辅助骨科手术也是机器人的“脑-眼-手”协调工作的过程,提高了手术方案的合理性及方案的执行精度,并融入了医生思维过程。下面主要针对骨科手术机器人的核心架构及临床应用展开论述。
1 设计思路
传统骨科手术主要是医生通过观察病人的影像资料后,在脑中构思,徒手操作手术的过程。而仿人类思维机器人是对医生常规操作的精准映射,通过一系列协作与协调算法,将机器的控制巧妙融入医生原有工作流,最终形成极优的人机协同控制结果,其架构设计极度贴合医生逻辑,医生思维实现了数据化,手术信息实现了即时性以及可视化,手术操作过程实现了精准化。
2 仿人类思维机器人核心架构
2.1 仿人类思维骨科手术机器人核心架构
我们提出的基于仿人类思维的机器人核心架构,根据功能分为脑、眼、手三大模块,如图2所示。
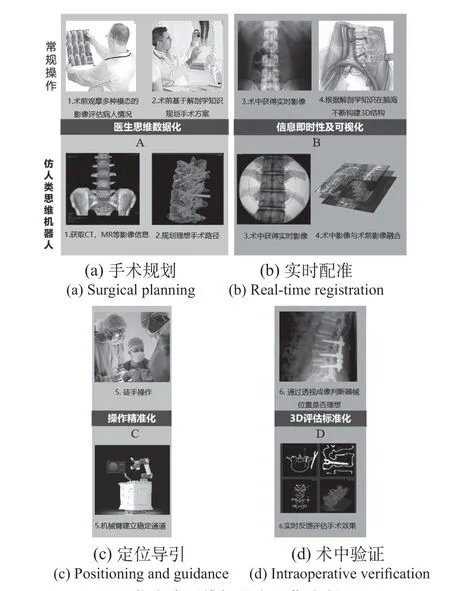
图1 仿人类思维机器人工作流程Fig.1 Work process of the robot based on human-like thinking
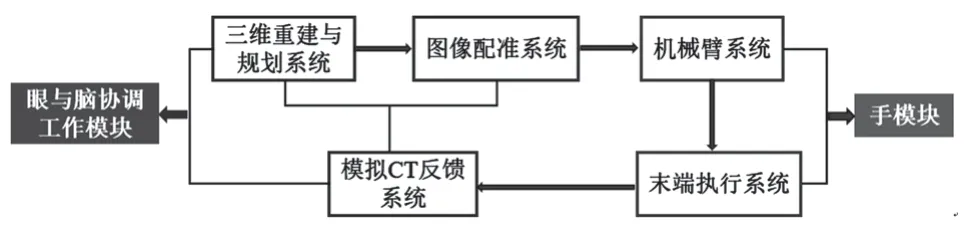
图2 仿人类思维骨科手术机器人核心架构Fig.2 Core architecture of human-like thinking orthopedic surgery robot
2.2 脑
脑的架构主要包括三维重建与规划系统和术中反馈系统两个子系统。其中三维重建与规划系统可以在术前针对不同情况为患者制定个性合理化的手术方案即进行术前规划,实现了医生思维的数据化;模拟CT反馈系统可以在术中及时反映手术情况,用于术中及时评价置入器械位置是否合理,实现了手术结果评估的标准化。
2.2.1 三维重建与规划系统
传统术前规划方式是医生在观摩CT、MR等多种模态的影像之后,在脑海中构建患者影像结构的三维模型,然后再依据个人经验进行手术方案规划,这种术前规划方法存在精度较差、主观性强、手术成功率不高等问题[14-15]。我们设计的仿人类思维机器人,只需要在手术进行前将CT、MR等多种模态的影像导入系统,本机器人的三维重建与规划系统可对导入的医学影像进行处理,提供DICOM三维图像的预览、重建、手术规划、配准及反馈的3D交互功能,机器人可辅助医生实现病灶冠状位、矢状位、横断位关键数据的测量,进行理想手术路径的规划,对3D虚拟内植入物进行个性化设计,规划复杂螺钉的置入路径,可规划创伤手术切口位置及长度,行手术风险评估,最大限度地避开危险区,帮助医生精确定位病变位置,完成手术模拟以及风险评估等,可以在很大程度上减少各种手术风险。
2.2.2 术中反馈系统
模拟CT反馈系统可以在术中及时反映手术情况,用于术中及时评价置入器械位置是否合理。目前临床判断椎弓根螺钉置入位置的方法有X线透视、CT等影像学手段,X线透视主要依靠术者经验,效果不可靠,术后CT是当前检验螺钉位置的金标准,但无法在术中实时反映螺钉位置,术后发现螺钉误置为时已晚,术中CT可在术中对椎弓根钉位置进行评估,避免术后因椎弓根钉误置而导致二次手术,但术中CT价格昂贵,目前很少应用。我们开发的机器人具有模拟CT反馈系统,医生在不增加额外X线辐射的情况下(仅需采集C臂机正侧位透视),通过横断位、矢状位、冠状位三个CT视图及3D虚拟模型直接观察螺钉位置,从而进行实时直接的干预,及时实现术中评估与纠正,提升手术安全性。
2.3 眼
眼的架构主要包括图像配准系统。图像配准系统可以在术中进行无创实时配准,患者术中影像及时更新,实现了手术信息即时性以及可视化。
机器人图像配准系统主要是辅助医生低辐射高频次获取术中病灶3D精密图像,供医生更新虚拟手术路径,保证手术设计蓝图与目标解剖结构动态匹配。目前,传统骨科治疗通常是在术中获得实时影像,医生根据解剖学知识在脑海中不断构建3D结构,术中再采集X射线图像,提供实时信息以调整手术方案。这种方法对医生个人经验要求较高,准确性不高。我们设计的机器人采用多模态图像处理技术,可在获取术中病灶透视片后,将其与术前三维模型进行实时配准,使术中影像与术前影像融合,模拟人脑的思维过程,可以保证该虚拟规划路径匹配患者实际位姿。
2.4 手
手的架构主要包括机械臂系统与末端执行系统。机械臂系统具有实时手术场景构建并更新场景功能;末端执行子系统用于建立微创手术通道,实现了手术操作精准化。
2.4.1 机械臂系统
采用具有六自由度的机械臂,采用实时运动仿真策略,具有实时手术场景构建方案,实时感知机器人周围的环境,并更新场景功能。手术机器人机械臂分为肩关节、肘关节和腕关节,每个关节都有2个电机,分别实现旋转功能和弯曲功能。具有数据通信协议,指挥控制电路执行相应的动作,使操作指令能被机器人接受,并准确按照指令执行。具有激光中心点自动识别功能:机器人可自动识别激光中心点(或激光中心点坐标),并实现手术器械中心位置与激光中心坐标完全重合;具有避障算法、运动规划算法,保证手术过程中运行平稳且保障高精度。机器人可利用机械臂建立稳定通道,使手术操作更精准。
2.4.2 末端执行系统
末端执行系统用于建立微创手术通道,过滤掉外科医生任何手动作的震颤。末端执行系统需要挂接到手术机器人的机械臂上,二者通过机械臂接口模块进行连接,因此建立匹配及牢固的接口模块,完成末端执行系统的搭载和快速更换。本子系统采用ANSYS建立力学模型并结构优化设计,保证手术器械轻量化同时又保有足够的工作精度,以完成各种精细动作。
3 临床应用
3.1 一般资料
选取2020年4月至2021年1月收治的采用仿人类思维机器人进行辅助置钉的骨盆骨折患者8例,其中男5例,女3例,年龄28~71岁,平均(55.83±16.76)岁,致伤原因:摔伤3例,交通事故3例,挤压伤1例,高处坠落1例。
3.2 手术过程
(1)手术路径规划:术前将CT影像导入系统,利用三维重建与规划系统对导入的图像进行处理,进行手术螺钉路径规划。
(2)配准:术中获取病灶透视片后,将术中影像与术前三维模型进行实时配准,使术中影像与术前影像融合。
(3)机器人辅助置钉:机械臂定位后,进行辅助置钉操作。
(4)术后位置确认:术后通过CT检查确认螺钉位置是否正确。
3.3 结果分析
回顾性分析了8例骨盆骨折手术案例,8例患者共置入10枚螺钉,对术中的各项指标进行记录并分析,并通过术后CT来评价螺钉置入位置,螺钉置入位置的评价分级标准[16]:①优,螺钉完全在通道内;②良,螺钉部分接触皮质骨但无穿出;③差,螺钉穿出皮质骨或进入关节内。患者术中以及术后评估各项指标,如表1所示。

表1 各项指标结果Tab.1 Results of various indicators
4 总结
我们提出的仿人类思维机器人核心架构与传统机器人相比,能够自然灵活地应对环境的变化与复杂的临床需求,具备了“脑-眼-手”协同操作的能力,可完成手术路径的精确定位,同时具有更好的实时性、更强的交互性、更佳的用户体验,在同类手术机器人中具有最强易用性,医生无需经过长期的培训周期,学习曲线几乎为零;在手术操作中,机器人分别对医生的脑、眼、手进行超强赋能,利用高精密3D重建技术实现医生思维的数据化,利用多模态图像融合技术实现手术信息的直观化,利用机械臂技术实现操作的精准化。仿人类思维机器人核心架构不额外增加医生的操作步骤,可以极大提升医生操作的精准性和工作效率,实现骨科手术的更加精准化与微创化。
当运用于临床骨盆骨折患者治疗时,本机器人可减少手术操作过程中对医生和患者的辐射,减少整体的手术操作时间,在术后对螺钉位置进行评价,说明机器人辅助置钉精度较高。本机器人可在临床进一步推广,并可推进外科手术实现精准定位和手术微创化。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
生物骨科材料与临床研究(2022年2期)2022-04-23
兵器装备工程学报(2021年12期)2022-01-11
中老年保健(2021年8期)2021-08-24
汽车工程(2021年12期)2021-03-08
保健与生活(2020年1期)2020-05-07
祝您健康(2019年12期)2019-12-12
当代陕西(2019年16期)2019-09-25
商品与质量(2018年36期)2018-04-15
