基于欠阻尼振动的液体黏度测量装置
2022-04-08 06:17:38张国兴卢盼功高剑飞盛桉笛蒙高庆
大学物理 2022年4期
谭 畅,张国兴,卢盼功,高剑飞,盛桉笛,蒙高庆
(1. 华北电力大学(保定) 计算机系,河北 保定 071000;2. 华北电力大学(保定) 机械系,河北 保定 071000;3. 华北电力大学(保定) 数理系,河北 保定 071000)
液体的黏度是区分液体的重要指标,而测量液体的黏度则是大学物理实验中的一项基础实验[1,2].生活中能够根据黏度区分水和食用油,但黏度差异不太大的液体则难以区分.通过对洗衣液、蓖麻油、菜籽油、水等液体的研究发现,液体的黏滞特性主要取决于液体种类和液体温度[3-5].同种的液体在温度较低时黏度一般较大,温度高时黏度较小.以往对黏度的测量大多采用落球法或落针法[6,7],其原理是小球或细针在液体中下落时,先做加速运动,随着运动速度的增大,黏滞阻力随之增大,最终匀速下落.通过测量小球或细针的匀速下落速度的大小,可以得到液体的动力学黏度[8,9].
传统落球法装置简单,原理清晰,过程直观,操作较为简便,但存在一定的弊端:落球法操作中小球的回收存在一定的难度[10];要求被测液体黏性大,有一定的透明度,限制了应用范围[11];因受到小球直径、容器内径、计时方式等因素的影响,液体黏度的测量误差多在7%~10%[12].
为了克服落球法的上述缺点和提高测量精度,本文设计了一套新的阻尼振动实验装置.该装置以一个做欠阻尼振动的弹簧振子为核心,利用光电接近开关来收集数据,并在示波器上显示图像,再将该图像数据传递到计算机上进行分析.为实现精确测量,该装置需要收集足够多的数据来进行分析,所以弹簧振子振动的次数不能太少.因此,该装置在较小和中等黏度的液体黏度测量中准确度较高,但在较高黏度的液体中表现不太理想.综上,本文的装置可以测量一定温度下中等黏度及以下不同液体的黏度,以及同种液体在不同温度下的黏度.
利用自制测量装置,在室温下分别对蓖麻油和菜籽油的黏度进行了测量.结果表明,与标准值相比,蓖麻油与菜籽油的相对误差分别为6.80%和7.55%,这说明该装置相比于传统落球法,在测量精度方面具有一定的优势.
1 实验原理及实验方案
1.1 实验原理

以竖直向下为x轴正方向,对小球进行受力分析,如图1所示.静止状态下,浸泡在液体中的小球悬挂在弹簧上,受到重力mg和浮力F1的作用,则有
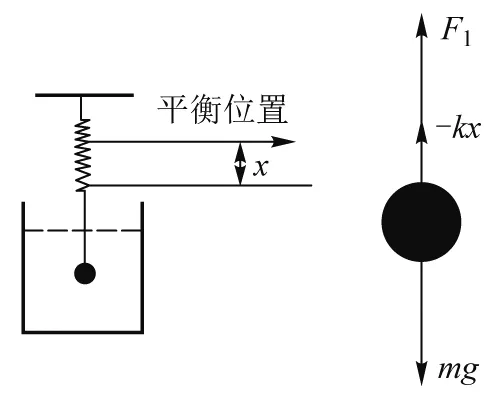
图1 小球受力分析示意图
F1=mg-kx0
(1)
小球开始做阻尼振动时,其受力方程为
(2)
由式(1)和式(2)得到
(3)

(4)
该方程的解为
(5)
其中y0为初始振幅,ω0是弹簧振子的固有振动角频率,φ为初始相位.
由于在液体当中,弹簧振子受到的阻力为斯托克斯力f=6πηrv,且f=αv,于是液体的黏度为
(6)
由公式(5)可知,根据测得的振动曲线,提取各个波峰/波谷对应的振幅及时刻,并按照指数拟合的方式求出其表达式y=aebx中参数a、b的值,其中b=-β.接着,再测量出小球的质量m和直径d=2r,便可根据公式(6)计算出液体的黏度η.

图2 装置实物图
1.2 接近开关原理
接近开关是一种无需与运动的被测物接触就可以进行检测的位置传感器.当物体接近开关的感应侧并进入到动作距离时,这种接近开关不需要与被测物体接触即可给采集装置提供信号.接近开关本质上是一种位移传感器,常见的接近开关有电感式接近开关、霍尔接近开关、超声波接近开关及光电接近开关等[13].
光电接近开关(光电传感器),是利用光电效应制成的开关,其由发射部分发射出调制后的光信号,经被检测物反射或阻隔,再被接受部分接收检测.光电接近开关一般由发射器和接收器组成,可根据发射器和接收器是否为一体分为漫反射型、镜反射型和对射型3种[13].本实验选择的光电接近开关是将发射器与接收器组成一体的一种测距传感器.当被检测物体经过测量范围时,发射器将发射足量的光线,接收器则接收反射回来的光线,进而产生电信号,得到接近开关与被检测物体之间的距离及相对应时刻.
1.3 实验模型
实验装置示意图如图3所示,弹簧振子在液体中做阻尼振动,挡板挂到弹簧振子上面,通过光电接近开关测量弹簧振子振幅随时间的变化关系,再经过RC滤波电路,在数字示波器上得到清晰的振动波形图.
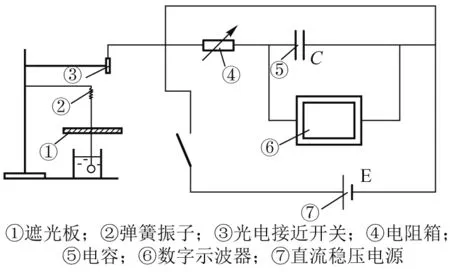
图3 实验装置结构图
待得到合适的波形图后,将示波器中的数据拷贝到电脑上,利用Excel对数据进行简单处理后,得到多个波峰/波谷对应的振幅、时间数据.然后,利用Matlab中的cftool拟合工具对所得的数据进行e指数拟合,得到表达式和其中的参数值,确定阻尼系数β的值,代入公式(6)中,即可得到待测液体的黏度η.
2 装置的设计与实现
2.1 装置设计
本实验装置主要分为三部分:振动发生装置、信号转化装置和信号显示装置.振动发生装置用于产生振动信号,信号转化装置用于将机械振动信号转化成电信号,信号显示装置用于观察波形和记录数据.
振动发生装置主要由弹簧和小球组成,经过多次筛选和反复试验,最终根据振动周期的大小和振动次数的多少,选择了拉力为4 N的弹簧和重量为32 g的小球.经实验测定,该振动系统在不同液体内振动的次数较多,有利于收集和处理数据.
对信号转化装置的设计,起初采用把机械振动信号转化为电阻变化,进而转化为电路中电流信号,再驱动发光二极管发光的思想,设计了如图4所示的装置.

图4 用滑动变阻器来转换信号的实验装置图
但是此装置在实际实验过程中,电刷和螺线管之间的摩擦太大,以至于振动次数太少,无法收集到可用数据,故将上述装置改进为不与振子接触的光电接近开关.此开关利用红外发射器发射探测光,经挡板反射,进入接收器,根据接收到的光强的大小输出线性变化的电压信号,经过实验测定,效果良好.
对信号显示装置的设计,本文之前采用了手机phyphox中的光感应器,利用实验电路中的电流变化转化为电路中发光二极管的光强变化,最后由phyphox中的光感应器测出感应曲线,传输到计算机上进行分析.但在实际实验过程中发现,手机phyphox软件采样时间的步长较大,而且无法设置步长,且发光二极管发光的强弱变化区间较小,导致不同液体中测得的振动周期不准确.
为了解决这个问题,本文利用RC振荡电路将传感器测得的信号进行滤波,最后输入到数字示波器中进行显示,经过实际计算,数据较为准确.
2.2 系统误差分析
该装置的误差主要来源于当弹簧振子振动时,挡板与空气摩擦产生的阻尼,所以需要再测量一次空气对该振动系统形成的等效黏度,再用上述数据减掉此黏度,以排除空气阻力带来的影响.
另一误差来源于弹簧振子在水平方向的晃动.本实验中考察的是弹簧振子在竖直方向的振幅随时间的变化关系,水平方向的晃动会导致挡板倾斜,使得测距开关到挡板的距离增大,导致振幅随时间变化出现异常,影响实验精度.因此,在释放弹簧开始测量时,应防止弹簧振子的晃动.
3 实验数据的测量与分析
3.1 蓖麻油黏度的测量
为了测量蓖麻油的黏度,让弹簧振子在符合国标Q/HHL04-98的蓖麻油中进行阻尼振动.室内温度为23.6 ℃,蓖麻油温度为23.3 ℃.光电接近开关的工作电压为9.9 V,RC滤波输出电路中电阻值为5 kΩ,电容值为10 μF.小球的质量为32.1 g,直径为20.0 mm.测得的振动曲线见图5.
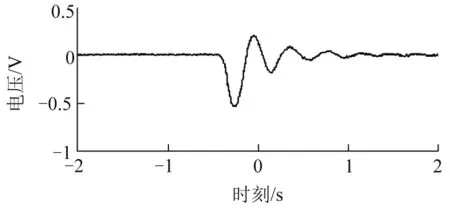
图5 蓖麻油中弹簧振子的振动曲线
实验中为避免出现偶然误差,反复测量三次,取不同时刻对应的波峰振幅数据,得到表1.

表1 蓖麻油中三次实验中不同时刻弹簧
经过三次测量,得到的平均阻尼系数为β=2.679,代入公式有
让弹簧振子在空气中自由振动,测出的振动曲线如图6所示.

图6 空气中弹簧振子的振动曲线
取不同时刻对应的波峰振幅数据,得下表2.经过计算得到的弹簧振子在空气中的等效阻尼系数β0=0.101 6,因此实际的阻尼系数应为β2=β-β0=2.577 4,代入公式(6)得到蓖麻油黏度为
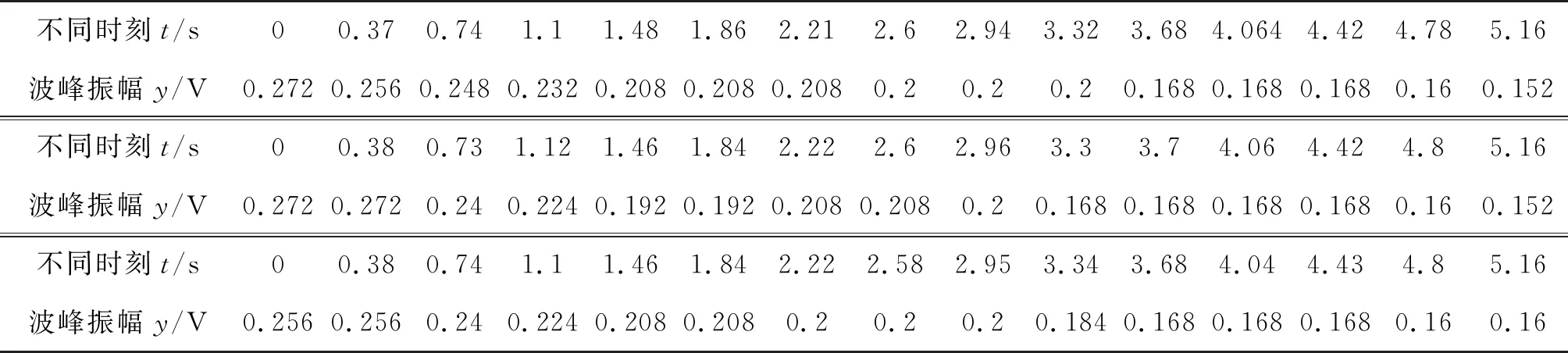
表2 空气中三次实验中不同时刻弹簧振子的振动波峰(23.6 ℃)
相对误差为
3.2 菜籽油黏度的测量
让弹簧振子在符合国标T1536的菜籽油中进行阻尼振动.室内温度为23.6 ℃,光电接近开关的工作电压为9.9 V,RC滤波输出电路中电阻值为5 kΩ,电容值为10 μF.小球的质量为32.1 g,直径为20.0 mm.测得的振动曲线见图7所示.实验中为避免出现偶然误差,反复测量三次.
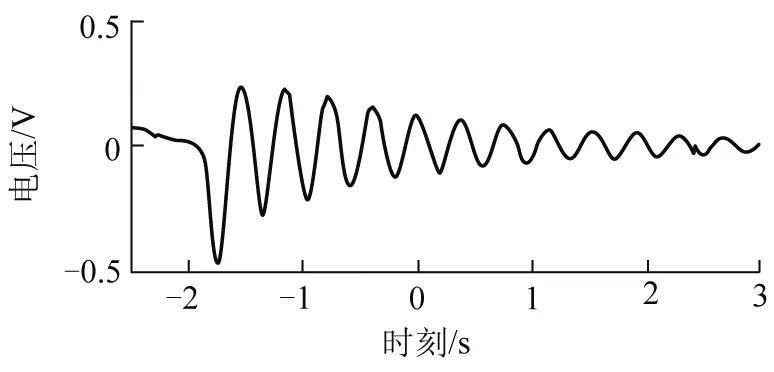
图7 菜籽油中弹簧振子的振动曲线
取不同时刻对应的波峰振幅数据,得下表3.经过三次测量,得到的平均阻尼系数为β=0.594 9.根据弹簧振子在空气中做自由振动测得的等效阻尼系数β0=0.101 6,因此实际的菜籽油阻尼系数β2=β-β0=0.493 3,代入公式(6)中得到菜籽油的黏度为

表3 菜籽油中三次实验中不同时刻弹簧振子的振动波峰(22.5 ℃)

续表
根据菜籽油黏度随温度的拟合关系式[15,16]
其中T为菜籽油温度(单位为℃),可知在22.5 ℃时,菜籽油的标准黏度应为0.156 2 Pa·s.由此可知测量相对误差为
4 性能指标
1) 测量范围:适用于中低黏度的液体,如石油、润滑油、洗衣液、蓖麻油、花生油、菜籽油、自来水等.当液体黏度较低时,受空气阻力的影响较大;当液体黏度较高时,可扣除等效空气阻尼系数,测量精度较高.通过选用合适的小球、细线和不同劲度系数的弹簧,可适用于高黏度的液体.
2) 精确度:对上述范围内的液体测量误差较小.对于蓖麻油,扣除空气阻力的影响后,相对误差为6.80%.对于菜籽油,扣除空气阻力的影响后,相对误差为7.55%.
3) 响应时间:该装置响应时间极短,能够通过数字示波器实现实时观测、测量与数据存储.
5 创新点
1) 使用光电接近开关来感应振动信号,能实现无接触地将机械振动转化为电信号,避免增加额外阻尼或出现干扰信号,保证了装置的测量精度.
2) 使用数字示波器来显示振动信号,不但可以观测到低频的振动信号,还可以实时测量阻尼振动的振幅和时间,也可以存储和复制数据,便于后续分析.
3) 实验中使用RC振荡电路来滤波,排除了光电接近开关触发信号的影响,使得数据信号不再是一个波包,而是明显的欠阻尼振动曲线.
4) 适用范围广,不受液体颜色、浓度、温度等因素的影响.
6 结论
设计并自制了基于阻尼振动的中低黏度测量实验装置.实验结果表明,液体黏度与液体种类有关,菜籽油的黏度相对较小,蓖麻油的黏度相对较大.由于采取了无接触式测量,并采用RC滤波电路,使得该装置稳定性较强,在相同条件下,反复测量得到的结果较为接近.
对于蓖麻油,由于其黏度较大(接近0.9 Pa·s),小球在该液体中做阻尼振动的持续时间较短,从弹簧振子的振动曲线(见图5)看到,经过三个周期,振动不再明显;对于菜籽油,因为其黏度较小(接近0.17 Pa·s),小球在该液体中做阻尼振动的持续时间较长,从弹簧振子的振动曲线(见图7)看到,经过九个周期,仍具有一定的振幅.
通过测量发现,消除因空气阻力造成的影响后,蓖麻油的黏度的测量相对误差为6.80%;若未排除空气阻力的因素,相对误差则达到11.01%.
由此可知,该实验装置在测量黏度中等偏下的液体的黏度时,准确性较好;黏度较大时,不易观测到明显的阻尼振动曲线,使得其黏度的测量比较困难.对于黏度较大的液体,可施加周期性驱动力,使得带弹簧的小球在液体中实现受迫振动,通过测量发生共振时的振动周期,得到液体的黏度.对此,笔者计划继续开展相应的探索和研究.
猜你喜欢
中学生数理化·自主招生(2021年8期)2021-05-30 10:48:04
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
动漫界·幼教365(中班)(2020年8期)2020-06-29 07:28:25
家教世界·创新阅读(2020年4期)2020-06-03 04:38:56
家教世界(2020年10期)2020-06-01 11:49:26
数学物理学报(2018年1期)2018-03-26 08:16:58
电测与仪表(2016年18期)2016-04-11 11:30:30
现代食品(2015年16期)2015-12-20 09:07:14
中国塑料(2015年8期)2015-10-14 01:10:52
中国塑料(2015年7期)2015-10-14 01:02:49