
实用化光力加速度计中单微球重复起支技术
2022-03-30 07:16:54邝腾芳曾炜卿陈鑫麟肖光宗
导航定位与授时 2022年2期
熊 威,邝腾芳,曾炜卿,陈鑫麟,韩 翔,肖光宗,罗 晖
(国防科技大学前沿交叉学科学院,长沙 410073)
0 引言
光阱利用光与物质之间的动量传递实现对微粒的精密操控,是一种广泛应用于生物、医学、物理等多个领域的基础研究工具。和静电悬浮与磁悬浮技术类似,光悬浮的物体不与机械部件直接接触,能有效隔绝外部环境影响。特别是在真空环境下,热噪声得到进一步抑制,这使得光悬浮粒子在精密测量领域具有非常大的应用潜力。早在2005年,麻省理工学院的W. P. Kelleher等就提出了一种基于双光束光阱的加速度计,并对其进行了深入的实验研究。此后,随着真空光镊技术的发展,悬浮粒子的等效冷却温度不断降低,基于光悬浮技术的加速度和力测量灵敏度不断提升。2020年,耶鲁大学的F.Monteiro等在真空光镊系统中利用直径10μm的微球实现了95±41n/Hz的加速度测量分辨率。近年来,国防科技大学、中国科学技术大学和浙江大学在真空光镊精密测量方面取得了较大突破,大大推动了光力加速度计向实用化发展的进程。
实用化的光力加速度计常采用小型化或集成化光阱系统,如光纤光阱,这样的光阱系统中光阱区域一般较小。由于要克服微球与初始表面之间的范德华力、毛细力等黏附力作用,在较小的区域内微球从初始表面脱离进入光阱区域并被光阱囚禁是一大挑战,这个过程称为起支。常用的微球起支方法包括喷雾与机械振动方法,其中喷雾法是利用喷雾器使得大量呈气雾状的分散颗粒充满光阱区域,随机捕获落入光阱捕获区域的微球;而机械振动法则是使用压电元件促使微球随着振动表面高频运动,微球所受惯性力克服表面黏附力后实现起支。目前,这两种方法都是在大量运动方向和运动速度随机的微球中挑选一个或多个满足捕获条件的对象,一方面捕获效率较低,另一方面会产生微球浪费并污染真空环境。浙江大学傅振海等提出了一种利用激光脉冲发射微球至光阱区域的方法,可实现单微球的起支捕获。国防科技大学邝腾芳等通过对压电元件振动模式的选择,实现了单微球的可控起支。上述文献中捕获室均未密闭,而在实用化光力加速度计中捕获室均是密闭的。国外未见光镊中单微球重复起支技术的相关报道。
本文首先介绍了光力加速度计的基本结构和原理,并描述了片上光纤光阱结构,研究了机械振动法微球起支过程中的动力学过程。通过对机械振动过程中微球运动状态的建模,分析了最优可起支速度范围。设计了微球起支闭环控制环节,通过实时监测微球的捕获状态,实现了振动起支过程的自动化控制。
1 光力加速度计结构与原理
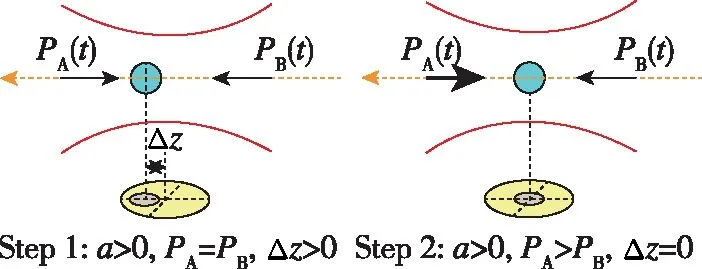
光力加速度计的基本原理如图1(a)所示,两束相向传播的激光A和B形成双光束光阱,实现对介观尺度传感质量的捕获和悬浮。通过控制两束光功率()和()的相对大小,可以实现微球位置的闭环控制。传感质量在光阱中偏离其平衡位置的相对位移Δ与载体的惯性加速度成正比,从而实现了对惯性加速度的测量。通过组合两对或三对相向传播的捕获光束,且每对捕获光束的光轴相互正交,就可实现双轴或三轴加速度测量。
(a)
光力加速度计的基本结构如图1(b)所示,由光源系统、光强调制系统、片上光阱、微球位置探测系统和信号处理模块五部分组成。光源系统为片上光阱提供悬浮光束,信号处理模块接收位置探测系统检测到的微球位置信号,并将其反馈到光强调制系统,从而改变两束悬浮光束的光强分布,保持片上光阱中的微球位置不变,形成闭环反馈回路。基于V型槽的片上光纤光阱如图2所示,在石英基片上刻有一条V型槽,两根光纤通过V型槽对准。两光纤之间为长方体状空腔,称为捕获室。在光学显微镜下使用探针将一颗透明介质微球转移到捕获室内,用另一片石英片压紧光纤并实现捕获室密封。捕获光源通过两端光纤耦合进入到捕获室形成双光束光阱。

(b)图1 (a)光力加速度计测量原理;(b)光力加速度计基本结构图Fig.1 (a) Schematic of acceleration sensing in dual-beam fiber-optic trap; (b) Structural diagram of light force accelerometer

图2 片上光纤光阱俯视图Fig.2 Top view of the on-chip fiber-optic trap
2 微球起支过程的动力学分析
微球起支与捕获过程中,受到捕获室内壁的表面黏附力、空气黏滞阻力、光力和重力的共同作用,微球将经历复杂的动力学过程。
2.1 光阱力
俘获粒子的尺寸远大于捕获激光的波长,应用射线光学近似计算光阱力,双光纤结构中的总光阱力是两根光纤出射的光束所有光线的贡献之和,每根光纤产生的光力可分解为轴向分量和横向分量,分别表述为
=

(1)
=

(2)
其中,为环境介质折射率;为单根光纤携带的光功率;和分别为入射光线的入射角和折射角;和分别为微球表面的折射系数和反射系数。利用式(1)和式(2)对所有光线求和后即可求出入射到微球上的光力。
仿真用到的各项参数为:=1,微球折射率=146,微球半径=5μm,激光自由空间波长=980nm。捕获激光出射场的束腰半径=3μm,单侧激光总功率=200mW。
2.2 表面黏附力
真空光阱中,微球黏附于捕获室内壁时受到多种力的作用,主要包括:范德华力、静电力、毛细力等。其中,通过降低起支实验环境湿度,可有效减小毛细力的影响。同时,静电力可以通过长时间静置或者接地而消除。范德华力是广泛存在于分子间的作用力,当接触表面间的距离减小到一定程度时,其大小不可忽略。对于微球与捕获室底面的接触,范德华力可以表示为

(3)
其中,为与材料有关的Hamaker常量,对于石英玻片和微球的接触,=10.38×10J;为微球与捕获室表面的距离,通常为0.3nm;为微球半径;为捕获室内表面球形粗糙峰的半径。
2.3 起支速度分析与讨论
使用正弦信号激励压电元件,其振幅()、速度()和加速度()可以表示为
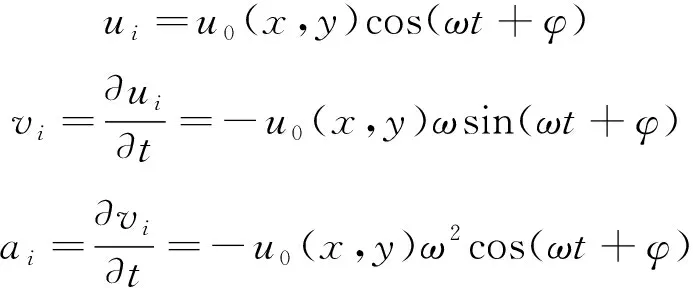
(4)
其中,和为振动平面上不同位置的坐标;和分别代表振动频率和相位。对于一个放置于振动表面的微球,其所受的惯性力可以表示为
==-(,)cos(+)
(5)
其中,为微球质量。由式(4)与式(5)可知,最大惯性力为
=(,)=(,)
(6)
其中,(,)为微球随压电元件振动时的最大幅度;(,)为最大振动速度。
通过采用机械振动方法,微球将脱离振动表面,此时微球受到范德华力、空气黏滞阻力、光力和重力的共同作用。当微球刚刚脱离捕获室底部时,其速度方向竖直向上。此时微球的受力情况如图3(a)所示,其中,点为光阱中心,为光阱离捕获室底部的距离,定义为光阱高度。微球的运动学方程为

(7)
其中,方程左边第一项为微球所受范德华力;第二项为重力;第三项为光阱力;第四项为空气黏滞阻力,为空气的黏滞系数。该方程为二阶微分方程,可以使用Runge-Kutta数值方法求解,得到微球脱离捕获室内壁后的速度和轨迹。
设微球密度为2.6g/cm,半径为5μm,折射率为1.45,单侧光功率为200mW,=58μm,只分析微球在平面的运动情况。考虑极端条件,即微球初始位置位于捕获室底部靠近光纤端面处,此时微球质心坐标为(-44μm,0,-58μm)。求解式(7)可以得到不同方向初始速度下,微球沿方向的运动轨迹与运动速度的变化,如图3(b)和(c)所示,其中十字标记为起点位置,圆形标记为终点位置。
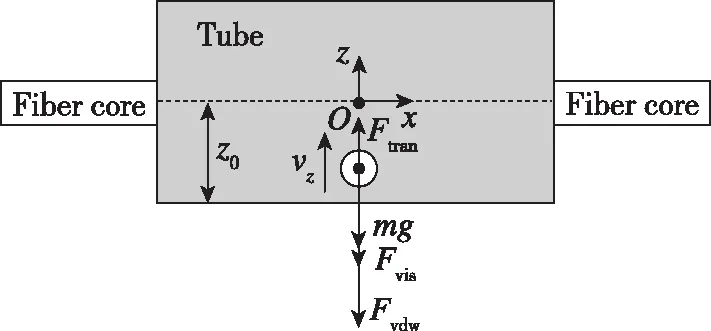
(a)起支过程微球受力示意图
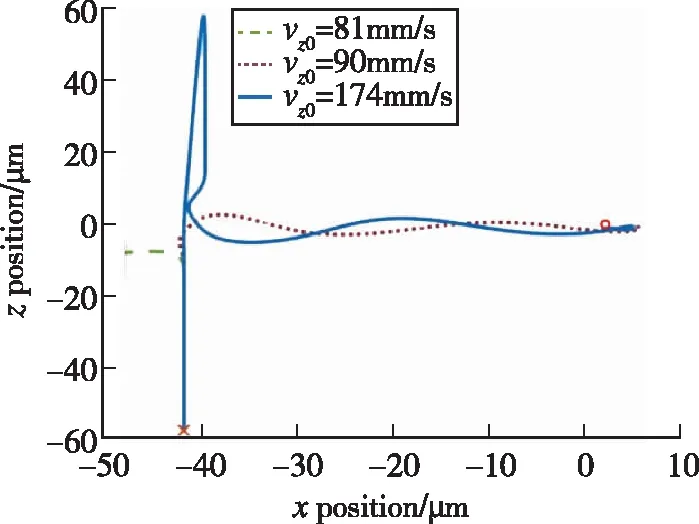
(b)不同初始速度下,微球沿xz平面的运动轨迹

(c)不同初始速度下,微球速度随时间的变化过程图3 微球起支过程动力学分析Fig.3 Dynamic analysis results of a loaded particle
由图3(b)可见,当初始速度为81mm/s时,微球位置未能稳定在=0处,而是沿轴负方向运动到光纤端面上;而当初速度大于174mm/s时,微球将运动到≈58μm处,接触捕获室顶部的石英片。其结果是微球重新被表面作用力吸附在捕获室上,直到下一次振动周期时微球以相近的初速度加速向下运动。只有当81mm/s<<174mm/s时,微球能够在光力作用下稳定在平衡位置,称满足该条件的初始速度为可起支速度。该速度范围与捕获室尺寸有关。捕获室尺寸决定了的大小,影响微球起支过程中受到的力做功的长度。同时,捕获室尺寸也决定了微球起支后运动的上边界。所以捕获室尺寸改变时,可起支速度的上下限都会改变。
图3(b)对应的速度变化如图3(c)所示,微球以一定速度脱离捕获室内壁后,开始在多种外力作用下进行变加速运动,直至达到最终稳态时速度降为0。对于不同的初速度,微球达到稳态时所需的时间均小于20ms。其中,为81mm/s时,微球最终的运动状态为速度小于0的匀速运动,这与图3(b)的分析不符,这是由于仿真时没有设置下边界,理论上微球在重力与空气黏滞阻力作用下达到力平衡。
压电元件的振动频率和幅度决定了微球的初始速度与初始动能,当初始动能足够大时才能支持微球进入光阱区域,但动能过大又将导致光阱无法捕获微球。这就要求微球随压电元件振动时产生的惯性力必须足以克服捕获室内壁的范德华力,并且相对于光阱的初速度需满足可起支速度范围(81mm/s<<174mm/s)。根据可起支速度范围,即可确定压电元件的频率和振幅,实验中一般选取谐振频率为10k~100kHz量级。根据式(6)可将振动幅度调节到合适区间,使微球初速度在起支速度范围内。除此之外,由于微球从脱离捕获室内壁开始到趋于稳定的时间在20ms以内,压电元件相邻振动周期之间的间隔也应大于20ms。
3 微球的自动起支实验
微球起支所用的压电元件振动频率较高,微球捕获后若片上光纤光阱不及时停止振动,可能导致微球逃逸。针对这种情况,本文提出了利用光纤耦合功率监测微球捕获状态并实现微球起支自动控制的技术。
3.1 微球捕获状态判断方法
双光纤光阱中,由于两根光纤相向放置且距离较近,其中一根光纤出射的激光有一部分会耦合到对侧光纤中。当微球在光阱区域时,会对光束产生折射,改变光束的传输路径。利用有球与无球情况下激光耦合功率不同可以快速判断微球是否捕获。
如图4所示,左侧光纤出射的激光经过微球后耦合到右侧光纤中。光纤出射激光近似为高斯光束,其光斑半径与波前曲率半径会随光束传输距离的变化而变化
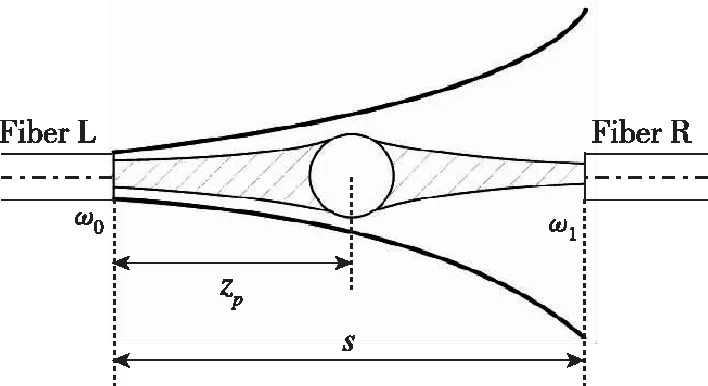
图4 双光纤光阱中激光耦合示意图Fig.4 Light coupling between two fibers in dual-beam optic-fiber trap

(8)

(9)
其中,′为目标点与束腰平面之间的距离。(′)为高斯光束的参数,利用光传输矩阵容易计算出(′)。

(10)
若将微球近似为透镜,激光从左侧光纤出射后,有部分光束(图4中阴影区域)入射到微球后将被会聚,微球的焦距为
(11)
当有微球存在时,激光从左侧光纤到右侧光纤之间的传输矩阵为
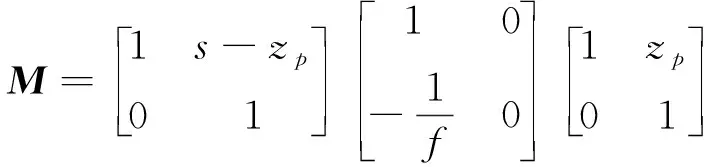
(12)
其中,为两光纤间距;为微球与左侧光纤的距离。将式(12)与式(11)代入式(8)和式(9),可计算出经过微球到达右侧光纤之前的光斑半径与波前曲率半径。到达右侧光纤处的激光与光纤的光斑半径匹配和波前曲率半径匹配表达式分别为
(13)
(14)
则激光从左侧光纤到右侧光纤的耦合效率为
(15)
根据式(15)可计算微球位于捕获室不同位置时的耦合效率(见图5),其中圆形标记线为未捕获微球的仿真结果,方形标记线为单微球捕获的仿真结果。由图5可知,片上光纤光阱的激光耦合效率与被捕获微球在光阱中的位置有关。在光阱中心时激光耦合效率具有极小值,在光阱中心两侧呈先增后减的对称分布。但无论微球位于哪个位置,微球捕获时激光耦合效率远小于未捕获时激光耦合效率。利用微球捕获前后光纤耦合功率的差异就可以判断微球的捕获状态。

图5 微球耦合效率随微球位置的变化曲线(MS:微球)Fig.5 Coupling efficiency versus the distance between MS and fiber end
3.2 单微球起支实验
采用光纤耦合功率判断微球捕获状态的实验简图如图6(a)所示。微球未捕获时,激光通过一根光纤直接传输到另一根光纤,并通过一个99∶1的光纤耦合器分束,在分光功率较小的一端使用光电探测器(PD)记录耦合功率。起支实验时,将实时测量的光纤耦合功率与预设的功率阈值进行比较。在微球进入光阱区域的过程中,耦合功率迅速降低到阈值以下,立即关闭压电元件的驱动电源,完成微球起支。

(a) 微球捕获状态监测实验示意图
如图6(b)所示,应用自动起支技术后,微球在振动起支过程中使用PD监测信号的变化情况,其功率阈值已转换为对应的电压单位,设置为2V。119.35ms之前,微球位于捕获室底部,此时探测器的信号幅度约2.8V,噪声较小。监测信号在此后0.3ms时间内快速降低至阈值以下,并经过约90ms的振荡后稳定在1.5V附近。此时微球处于稳定悬浮状态,信号噪声比未捕获时增大了很多,这主要来源于环境振动与微球在空气环境下的布朗运动。微球完成起支过程的时间约90ms,稍大于图3所示的20ms以内起支时间,但仍处于相同数量级内。

(b) 微球捕获前后的探测器测量信号图6 片上光纤光阱中微球起支过程观测Fig.6 Observation of the loading process of a partilce in the on-chip fiber-optic trap
4 结论
本文面向光力加速度计的小型化应用,设计了含封闭捕获室的片上光纤光阱。研究了封闭环境下利用压电元件起支微球的动力学过程,仿真结果表明,微球初始速度在最优范围内时才能实现光捕获,起支捕获过程需经历几十毫秒时间。
本文提出了一种利用光纤耦合功率监测微球捕获状态的方法,理论和实验显示,微球捕获前后光纤耦合功率变化明显。在该监测方法的基础上建立了压电元件的反馈控制回路,有利于提高单微球捕获重复性。
光力加速度计具有超低噪声和超高灵敏度的潜力,可实现n级分辨率的加速度测量。本文提出的单微球自动重复起支技术提高了光力加速度计的实用性。伴随着集成光学和微纳加工技术的快速发展,可进一步提高光力加速度计光学部分的集成度,有望实现高精度兼具小型化的光力加速度计,用于长航时导航、空间加速度测量等领域。
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06 05:09:08
潍坊学院学报(2020年6期)2020-11-22 08:04:10
压电与声光(2019年1期)2019-02-22 09:46:06
铜仁学院学报(2018年6期)2018-07-05 09:47:40
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年5期)2016-11-07 09:06:41
大连工业大学学报(2015年4期)2015-12-11 04:06:50
中国当代医药(2015年29期)2015-03-01 02:07:41
导航定位与授时(2014年2期)2014-04-27 13:41:11
振动、测试与诊断(2014年6期)2014-03-01 01:14:55
