
恶劣天气下的仿生偏振定向方法
2022-03-30 08:23:38吴新冬赵东花刘永鑫
导航定位与授时 2022年2期
吴新冬,赵东花,俞 华,晋 涛,刘永鑫,申 冲
(1. 中北大学仪器科学与动态测试教育部重点实验室,太原 030051;2.国网山西省电力公司电力科学研究院,太原 030001;3.中北大学仪器与电子学院,太原 030051)
0 引言
自然界中,果蝇、沙蚁、蜣螂等动物的导航能力是令人惊讶的。他们利用天空中的线偏振信息以及太阳位置信息,便可以精确地到达目的地。为了模仿动物们利用天空的偏振信息进行导航定向,近些年,国内外的许多学者对此进行了研究。2019年,国防科技大学提出了一种基于加权平均的仿生偏振光定向算法,车载实验证明精度优于0.5°,可应用于地面无人平台。2019年1月,艾克斯-马赛大学的J. Dupeyroux等根据沙蚁复眼设计了一种2像素的偏振视觉传感器,并集成到了六足机器人上,在晴朗天空静态条件下定向精度可达0.248°。2020年,北京理工大学提出了一种新的导航方向获取算法,可在小视场条件下通过对太阳方向矢量的拟合判断导航方向。通过在晴朗天空下的转台实验验证,定向精度可达0.3°,具有一定的应用前景。2021年,大连理工大学提出了一种基于模式的区域提取算法,在静态晴空的条件下定向精度可达0.2172°。
综合以上分析,基于大气偏振模式的导航定向已经在晴朗天空条件下获得了较高的精度。目前研究表明,动物在恶劣天气条件下仍然可以通过大气偏振模式进行导航定向。然而模仿动物在阴天、沙尘、雾霾等恶劣天气条件下的导航定向问题仍然处于探索阶段,主要集中在筛选出更加准确的偏振角度信息上。2017年,一种通过搜索偏振角度图像对称轴的方法实现了在雾霾天气条件下确定出大致的航向角。2020年,范颖等提出了一种用于多云天气条件下的大气偏振光定向方法,在少云情况下定向精度小于0.5°、多云情况下小于1°。同年,为解决部分遮挡天空的定向问题,一种偏振成像传感器的鲁棒梯度振幅和二元积分方位角方法被提出。然而,尽管上述文献中所述方法能够在一定程度上提高定向精度,但定向精度仍然显著受到天气影响。这主要是由于这些方法均基于被破坏的偏振角度图像进行拟合定向,而未考虑偏振角度图像本身的误差。所以寻找一种在恶劣天气条件下能够有效恢复偏振角度图像并实现准确定向的算法变得十分紧迫。
为了解决上述问题,本文提出了一种可用于恶劣天气条件下的大气偏振模式定向算法,通过块匹配的思想融合canny边缘检测算法,修补在恶劣天气条件下被破坏的大气偏振角度图像,通过对修补后的偏振角度图像进行直线拟合,实现了恶劣天气下更高精度的大气偏振模式定向。
1 原理与方法
大气偏振模式的最佳观测条件为高海拔干燥的晴朗天空,在非晴空的天气条件下偏振模式会遭到不同程度的破坏。而非晴空条件在现实中是广泛存在的,因此对大气偏振模式的智能处理就显得尤为重要。针对不同恶劣天气下的大气偏振模式受到不同程度破坏的问题,对阴天、沙尘、雾霾天气下的大气偏振模式进行了测量,如表1 所示。结果表明,无论是哪种恶劣天气,偏振强度均被显著破坏,并且强度值集中在0%~5%。在阴天、沙尘条件下,偏振角图像的对称∞模式会基本保持,但存在严重的噪声;在雾霾条件下,偏振角图像的对称∞模式会遭到破坏,但仍然关于太阳子午线存在明显的反对称模式。
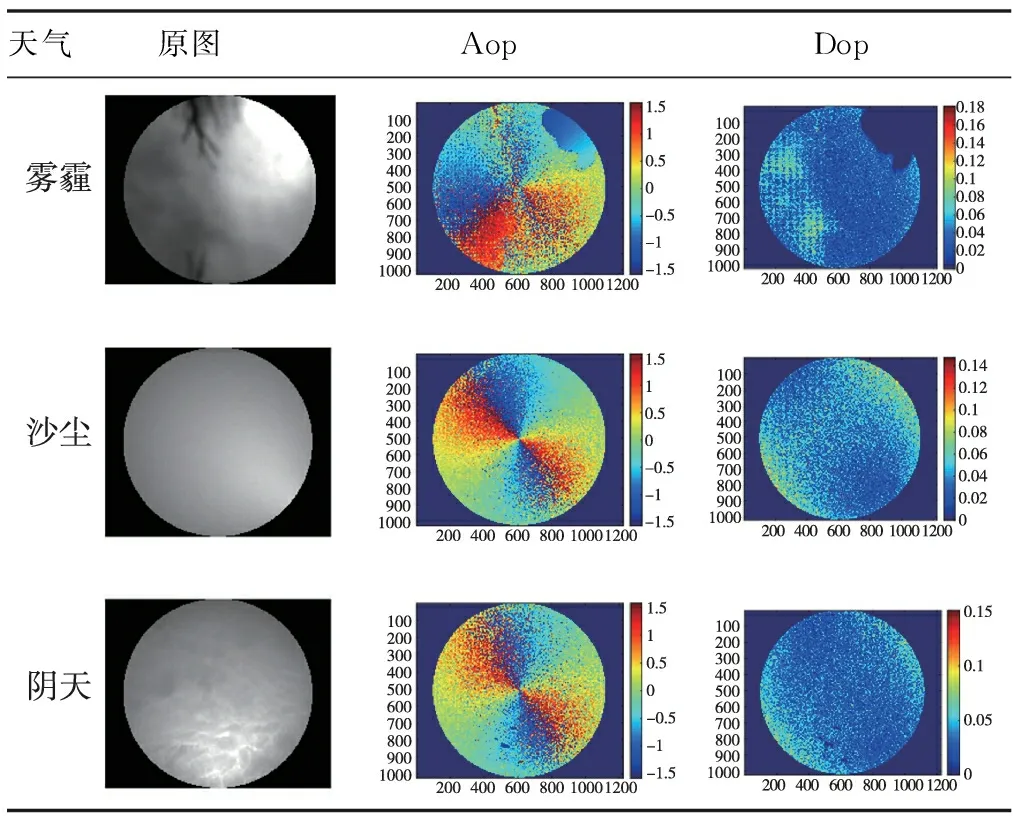
表1 不同天气下偏振信息对比
所以,在恶劣天气下基于大气偏振信息进行航向角解算之前先对其进行图像处理是有必要的。由于偏振角度被破坏的程度更低,故选择对更容易修复的偏振角度图像进行处理。将偏振角度图像的修复分为噪声粗处理和边缘提取处理去噪两部分。通过噪声的粗处理将四通道偏振图像中的大部分噪声去除,并恢复被恶劣天气破坏的偏振角度∞模式。然后通过对粗处理图像无穷型信号的边缘提取处理,对边缘之间的图像信息进行二次处理以进一步去噪。
1.1 噪声粗处理
目前,BM3D以及其延伸算法VBM3D、BM4D、VBM4D等算法为图像去噪领域峰值信噪比(Peak Signal-to-Noise Ratio, PSNR)结果较好的算法。此外,有研究表明BM3D算法对偏振图像有着良好的去噪效果。而无论是BM3D还是其延伸算法均采用了块处理的思想,所以在对噪声粗处理的阶段,沿袭块处理的思想,对噪声图像进行粗处理得到去噪后图像。
=()
(1)
式中,为噪声图像;为粗处理去噪函数。
首先,进行相似块堆叠,选出×大小的参考块,通过计算二范数2在其邻域内寻找相似块,最多个。

(2)
将相似块堆叠为三维块后,对每一个二维块进行二维离散余弦变换(Discrete Cosine Transfo-rm, DCT)

(3)
式中,()=()。
(4)

(5)
同时,由于堆叠后的图像块具有3个维度,在对第3个维度进行Hadamard变换后,对小于硬阈值的数置零。
(6)
由于DCT和Hadamard变换的高度对称性,进行三维反变换便可还原回时域,得到粗处理后的图像。

(7)


图1 三维块匹配算法流程图Fig.1 Flow chart of 3D block matching algorithm
1.2 基于边缘提取的噪声二次处理
尽管粗处理能够对被天气破坏的偏振角度图像进行一定程度的还原。然而,在实际应用中并非每次粗处理都能得到令人满意的效果。所以有效判断出处理后的结果是否如期望一致是必要的。针对大气偏振模式角度图呈现无穷型条状分布的特点,对粗处理后的图片进行二次处理。
首先,通过canny边缘检测算法提取出无穷型分布的边缘图像。
=()
(8)
其中,为边缘检测算法。基于大气偏振模式,有效去噪的边缘偏振角度二值图像均呈现出无穷型的特点,所以图像质心(,) 会更加接近天顶点。
(9)
其中,定义为

(10)
在此处、取值为0或1。 所以通过比较粗处理前后天顶点与图像质心的欧氏距离,便可以判断出是否为有效粗处理。

(11)
式中,、为天顶点在图像坐标系中的坐标。当不为有效粗处理时,图像返回粗处理部分并重新调节参数,直至欧氏距离差值大于阈值。
=|-|
(12)
其中,为粗处理后的边缘偏振角度二值图像质心至天顶点的欧氏距离;为原始图像的边缘偏振角度二值图像质心至天顶点的欧氏距离。
特别地,通过对二值图像边缘点的统计判别是否提取出图像边缘。认为当点数小于阈值1时,则未提取出边缘。若去噪前边缘点数小于1,而去噪后边缘点数大于1时,不再进行欧式距离判断,直接认为去噪是有效的。所以,通过阈值1可以免去当偏振角度图像∞模式被部分破坏时的判断,提高判断算法的准确率。
同时,设定阈值2,若去噪前边缘点数减去去噪后边缘点数大于2,则认为在此天气条件下不需要对偏振角度图像进行去噪处理,直接进行太阳子午线拟合即可得到准确的角度值。
图2展示了当一组粗处理前后的偏振角度图像输入后,算法的判断流程。
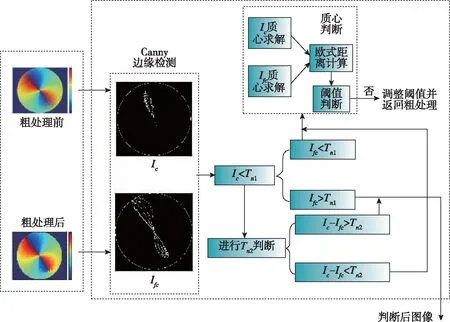
图2 判断算法流程图Fig.2 Flow chart of judgment algorithm
此外,为了对处理结果进行优化,当为有效粗处理时开始进一步去噪处理。由于偏振角度图像的无穷型条状分布的特点,通过对canny边缘图像进行再一次利用,将边缘内部的每一块小图像截取为方形长条,依据长度划分为小块并进行三维堆叠。此处由于偏振角度图像的特征,认为每一块条状内部分布均是相似的,所以在此处跳过相似块寻找部分,直接进行三维变换并去噪,得到最终处理后的图像,如图3所示。
图3中,A1为阴天条件下对粗处理后的偏振角度图进行边缘提取,B1为阴天提取边缘后的算法的最终输出图,A2为雾霾条件下对粗处理后的偏振角度图进行边缘提取,B2为雾霾提取边缘后的算法的最终输出图。实验证明,通过粗处理能有效提取出二次处理的边缘图像。算法总体流程如图4所示。

图3 噪声二次处理图Fig.3 Noise secondary processing image
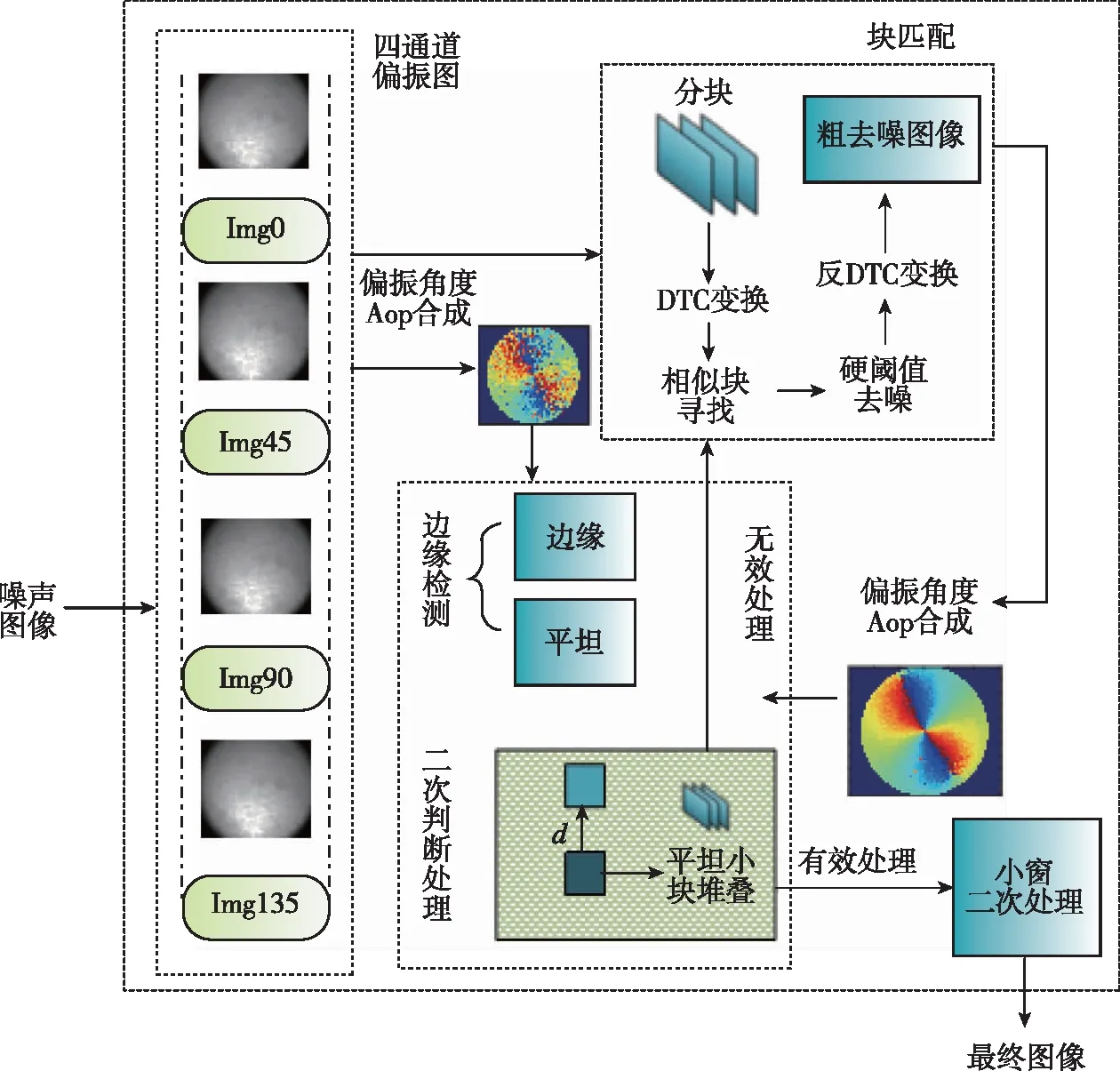
图4 算法流程总体图Fig.4 General diagram of algorithm flow
1.3 基于修补偏振模式后的航向角解算算法
基于瑞利散射理论,可以通过太阳子午线附近的偏振角度值拟合出载体坐标系下的太阳子午线。
所以,可以很容易得到载体坐标系下的太阳方位角
=arctan()
(13)
式中,为载体坐标系中的太阳子午线斜率。
在导航坐标系下,太阳方位角被定义为由反太阳位置指向太阳位置的方向与正北方向的夹角。当已知观测时间与观测点的经纬度时,可以通过天文知识求解得出

(14)
其中,为太阳高度角;为太阳方位角;为观测点纬度;为太阳赤纬角;为太阳时角。
通过导航坐标系与载体坐标系下的太阳方位角(图5),可以计算得到载体的航向角为
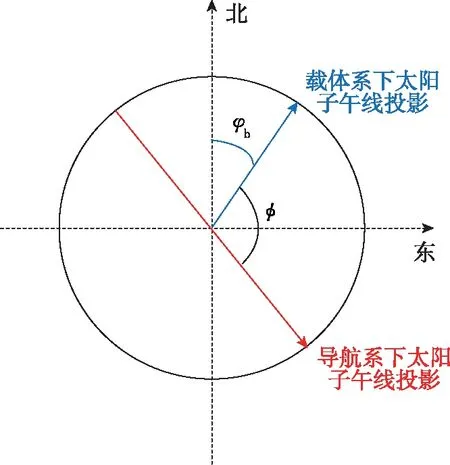
图5 定向示意图Fig.5 Schematic diagram of direction
=-
(15)
即在已知导航系下的太阳方位角后,载体的航向角误差主要由载体坐标系下太阳方位角产生。所以,通过对恶劣天气下的大气偏振模式进行修补,可以拟合出更加准确的载体坐标系下太阳子午线,能够有效减小恶劣天气下的航向角解算误差。
此外,由于不同天气条件下的偏振角度图像被破坏的程度是不同的,在晴朗少云等天气下大气偏振模式几乎不被破坏,可以直接提取边缘信息并进行处理,所以进行噪声粗处理部分是没有必要的;而在雾霾、阴天、沙尘等天气下,大气偏振模式中含有大量的噪声,导致无法直接提取出边缘信息,所以进行噪声粗处理就成为必须执行的一步。
所以依据天气情况进行参数的调整是有必要的。因为偏振强度随天气变化而发生剧烈变化,在恶劣天气下偏振强度较低,而在天气良好时会保持较高的强度值,故而偏振强度可以较好地区分出天气情况。
因此,依据偏振强度值将偏振图像划分为晴朗与恶劣天气两大部分后进行自适应偏振模式的修补。通过设置硬阈值进行天气的判断,当>20时,天气良好不进行粗去噪处理;当<20时,大气偏振模式受到破坏,需进行粗处理去噪。航向解算流程如图6所示。
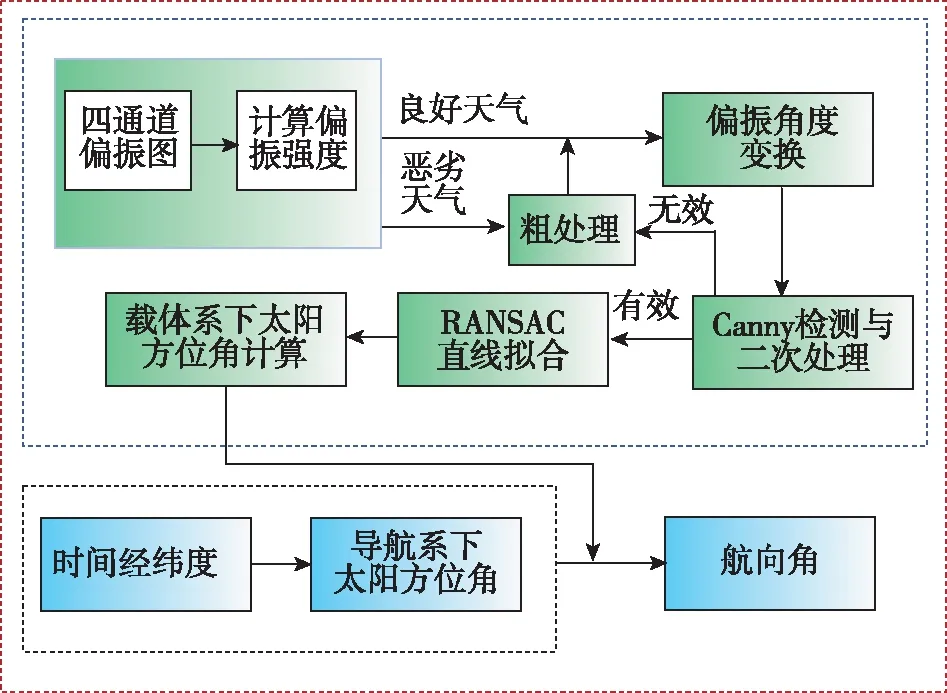
图6 航向角解算流程图Fig.6 Flow chart of heading angle calculation
2 实验
对所提算法进行了室外实验验证,于2021年3月在中北大学对大气偏振模式进行了测量,样机与参数如图7所示。测量设备为自行研制的仿生偏振定向样机,其中偏振传感器为基于Sony-IMX250MZRCOMS的四通道偏振相机,处理单元采用NVIDIA-TX2。
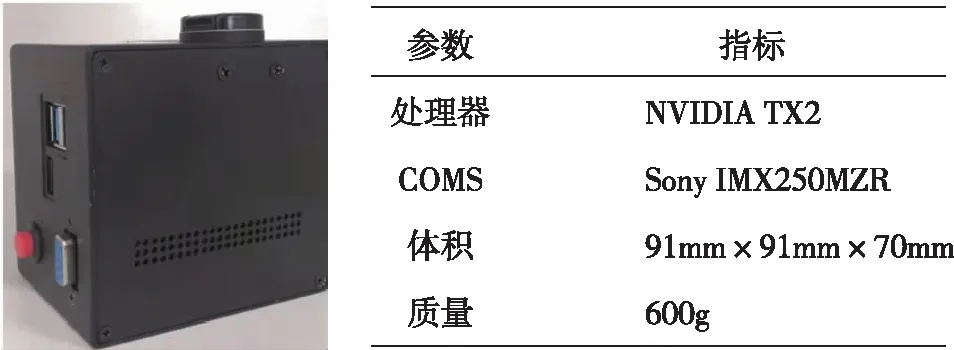
图7 样机与参数Fig.7 Prototype and its parameters
本文选择了阴天、雾霾、沙尘三种恶劣天气情况进行太阳子午线拟合,此外以晴朗天空条件下的偏振角度图拟合太阳子午线作为对比。由样机拍摄到的四种天气下的大气偏振图像如图8所示。
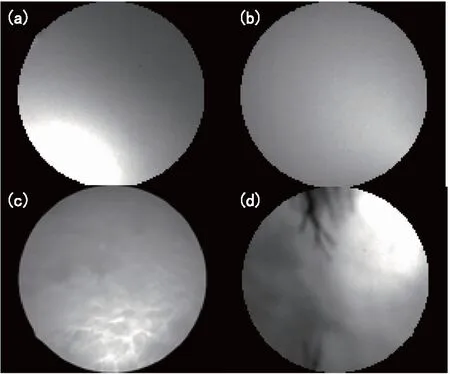
(a)晴天 (b)沙尘 (c)阴天 (d)雾霾图8 不同天气下的偏振图像Fig.8 Polarized images under different weather conditions
为了验证算法的有效性,对比采用本文算法与不采用本文算法直接拟合出的太阳方位角,如图9所示。同时,结合导航系下太阳方位角进行航向角的计算。其中基准航向角的数值来源为北斗星通公司生产的小型高精度光纤/卫星组合导航系统,型号为IMU-KVH1750,航向精度可达0.035°(RMS)。

图9 不同天气去噪结果对比Fig.9 Comparison of denoising results in different weathers
拟合结果表明,在晴朗天空下偏振角度的无穷型模式被破坏程度较低,使用本文算法拟合后能够更好地恢复出太阳子午线,达到更准确定向的目的;在阴天、沙尘天气条件下,偏振角度图像中噪声明显,直接拟合会带来较大的误差,但仍能得到大致方位;而在雾霾条件下,直接拟合时会出现较大偏移,甚至会出现12°的巨大误差,所以直接拟合去解算载体坐标系下太阳方位角就变得十分的不可信。
此外,实验结果表明,本文算法在各种天气下均可提升载体坐标系下太阳方位角的解算精度;同时在恶劣天气下,偏振光导航定向精度提升明显。如图10所示,在晴天条件下,精度从0.5657°提升为0.2411°;在阴天条件下,精度从4.0505°提升为0.7146°;在沙尘条件下,精度从3.0389°提升为0.9365°;在雾霾天气下 ,精度从12.2555°提升为1.048°。
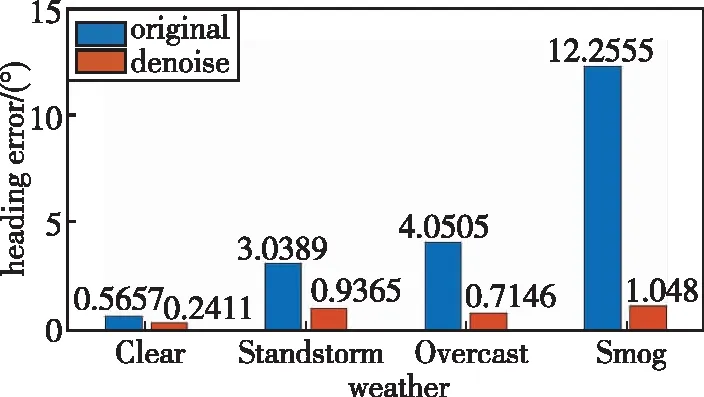
图10 去噪前后误差对比Fig.10 Error comparison before and after denoising
为了进一步验证本文算法在恶劣天气下的解算精度,分别对晴天、沙尘、阴天、雾霾条件下50组大气偏振模式进行了验证,其中对比算法分别为采用RANSAC算法直接拟合以及目前主流的利用偏振度筛选偏振角度的方法,结果如图11所示。

(a) 晴天
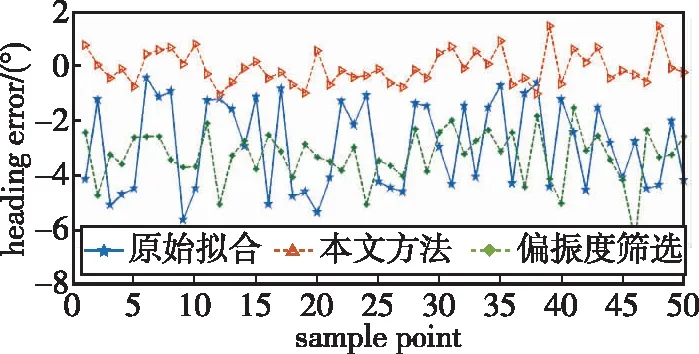
(b) 阴天
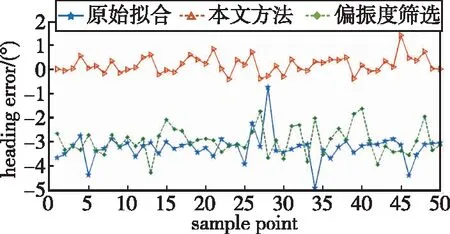
(c) 沙尘
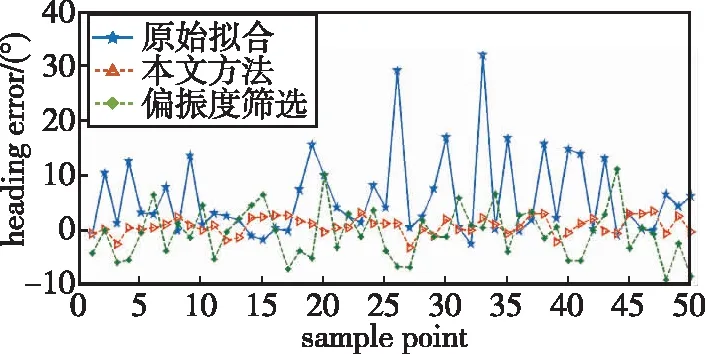
(d) 雾霾图11 航向角误差对比图Fig.11 Heading angle error comparison chart
通过对比四种天气条件下直接拟合与本文算法拟合的均方误差、标准差、平均误差、最大误差,如表2所示。实验结果表明,在晴天条件下本文算法RMS可达0.12°,在阴天条件下RMS可达0.6064°,在沙尘条件下RMS可达0.4058°,在雾霾条件下RMS可达1.6859°,对比直接拟合与偏振度筛选方法提升效果明显。

表2 去噪前后指标对比
3 结论
本文针对恶劣天气下偏振定向精度下降的问题,利用仿生偏振定向样机测量了晴天、阴天、沙尘、雾霾天气条件下的大气偏振模式,并进行了定向实验,结果表明:
1)虽然天气会破坏偏振强度模式,甚至在恶劣天气下偏振角度∞模式会消失,但反对称的模式具有高鲁棒性。
2)基于偏振角度图像关于太阳子午线反对称的特点,本文提出了一种可以在不同天气条件下自适应地进行偏振角度拟合的算法,相较于传统的拟合算法不仅能显著提高精度,而且能够有效地补偿被干扰的偏振角度模式。
3)本文算法能够有效提高定向精度,减小定向误差。在∞模式被破坏的雾霾天气下,RMS可从9.4470°提升至1.6859°。
猜你喜欢
电子制作(2019年12期)2019-07-16 08:45:20
测控技术(2018年6期)2018-11-25 09:50:24
长春师范大学学报(2018年8期)2018-08-17 12:40:20
小学生导刊(2017年13期)2017-06-15 20:29:38
通信产业报(2016年44期)2017-03-13 08:41:45
山西大同大学学报(自然科学版)(2016年2期)2016-12-12 03:19:15
食品工业科技(2014年7期)2014-03-11 18:14:50
物理与工程(2011年6期)2011-03-25 10:04:13
体育师友(2011年5期)2011-03-20 15:29:47
雕塑(1999年2期)1999-06-28 05:01:42
