
高稳定高可靠多平台兼容RTK精密定位系统设计与实现
2022-03-30 07:16:54石帅帅陈嘉宇程建华
导航定位与授时 2022年2期
齐 兵,石帅帅,陈嘉宇,程建华
(哈尔滨工程大学智能科学与工程学院,哈尔滨 150001)
0 引言
随着中国北斗三号全球卫星导航系统的建成开通,由美国全球定位系统(Global Positioning System,GPS)、俄罗斯GLONASS、欧盟GALILEO和中国北斗卫星导航系统(BeiDou Navigation Satellite Sy-stem,BDS)构成的全球卫星导航系统(Global Navigation Satellite System,GNSS)框架日渐形成。同时,GNSS产业链伴随着GNSS的不断完善而迅速发展,国内外众多机构迅速推出多类型GNSS模块快速占领市场份额,并形成了选择多、技术新、领域广的大好局面。随着精密定位需求的日渐增长,依赖于单一GNSS模块的精密单点定位技术已无法进一步满足精密定位需求,基于载波相位差分技术的实时动态(Real-Time Kinematic,RTK)定位系统较其他系统能提供更高精度的定位结果,因而得到了广泛应用。
RTK系统具有作业效率高、定位精度高、全天候作业和自动化集成度高等优点,已广泛应用于高精度位置服务,如地形测图、城市规划、精准农业等方面。然而,单一GNSS模块由于受到信号遮挡、干扰等问题可能出现定位结果连续性变差、实时性降低,进而使得定位精准性无法满足技术要求。同时,GNSS定位定向板卡快速更新换代使得RTK系统低兼容性问题日渐突出,导致其不能适应复杂多变的环境。因此,如何提升RTK系统的稳定性、可靠性和实时性是目前亟需解决的关键问题。
基于此,本文提出了高稳定高可靠多平台兼容的RTK精密定位系统:基于ARM+DSP架构的AM5728创新应用于实时解算RTK定位信息;基于冗余性设计方法的RTK定位系统创新应用于解决GNSS定位单元低兼容性问题;基于冗余方法设计的复合型高速通信链路提高了系统可靠性与实时性。该系统有效解决了稳定性差、可靠性低、兼容性低的问题。
1 总体设计方案
RTK精密定位系统由RTK定位解算单元、GNSS定位单元、修正信息交互单元和辅助单元组成,系统结构如图1所示。
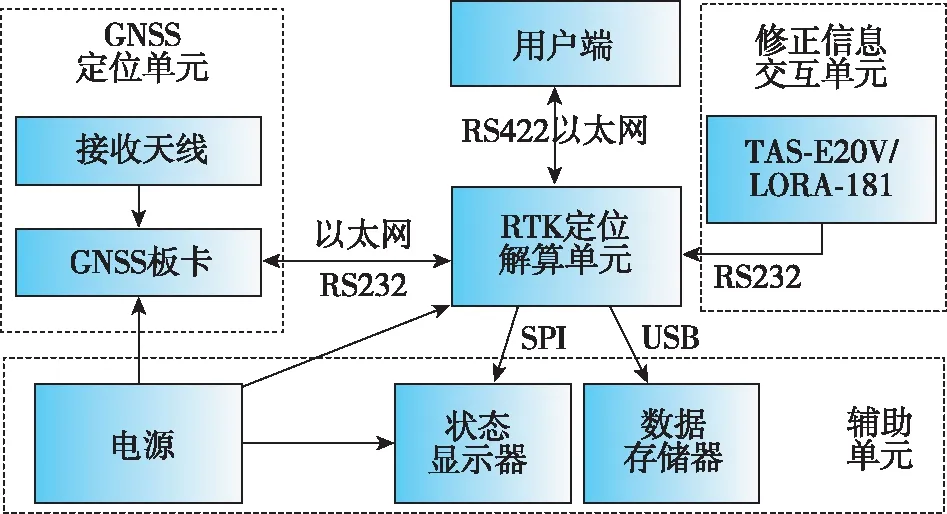
图1 RTK定位系统框图Fig.1 Block diagram of the RTK positioning system
RTK精密定位系统的总体技术方案具体如下:
1)GNSS定位单元:采用冗余式方法设计了GNSS定位单元,根据环境要求热切换备份GNSS定位板卡。基于分时工作的双GNSS定位板卡在对接收天线接收到的GNSS导航信息进行解算后,通过复合型高速通信链路发送给RTK定位解算单元。
2)修正信息交互单元:采用冗余式设计方法,根据工作范围的不同,灵活选择TAS-LORA-181或TAS-E20V完成基准站与流动站之间的定位修正信息的实时传输,并将定位修正信息发送给RTK定位解算单元。同时,采用远程终端介入方法,随时监视信息交互单元的工作状态。
3)RTK定位解算单元:采用ARM+DSP架构的AM5728处理器,基于RTK精密定位算法实时解算GNSS数据信息生成与修正信息,并通过复合型高速通信链路共享信息,从而完成RTK导航定位解算。采用ARM为主DSP为辅的架构,既提高了导航信息解算的实时性,又提高了系统的伸缩性与稳定性。
4)辅助单元:目标信息通过通信接口传输至用户平台,并在本地实时存储。此外,AM5728将当前串口工作和卫星跟踪状态实时显示,增强了系统状态的可观测性;电源对各单元分级供电。
RTK精密定位系统具有一机双用的技术特点,在实现实时RTK精密定位的同时能够满足高兼容性要求。同时,基于冗余式方法设计的各单元可以确保在当前单元故障时,提供备份工作方式,提高了RTK精密定位系统的稳定性。
2 RTK精密定位算法
双差RTK定位模型已经得到了广泛应用,该模型通过对卫星及基准站与流动站间进行求差得到双差观测方程,并进一步确定整周模糊度实现高精度定位,利用双差观测模型消除各种具有相关性的误差,从而很大程度上简化计算工作量。伪距与载波相位在进行双差处理后的观测方程可表示为
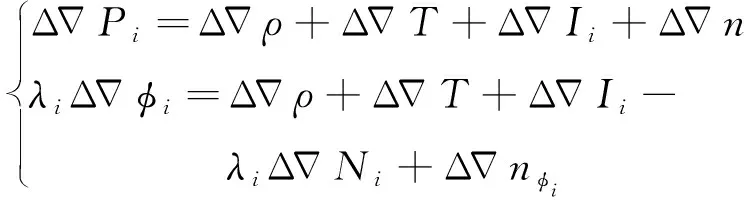
(1)

(2)

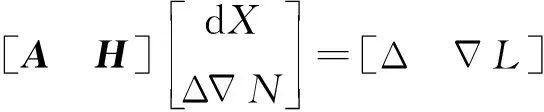
(3)
=
[′,′,′,″,″,″,‴,‴,‴,,…,-2]
(4)
式中,′、′、′为三维坐标参数;″、″、″为三维速度参数;‴、‴、‴为三维加速度参数;为模糊度参数。
3 RTK精密定位系统硬件平台设计
基于总体技术方案及RTK精密定位算法,RTK精密定位系统的主要功能包括:1)高速数据解算能力;2)实时动态差分:通过解析修正信息输出精密定位信息;3)多种无线传输方式:灵活选择定位修正信息交互方式;4)多种GNSS板卡兼容:适用多种不同工作环境;5)多类型多路输出接口:具备复合型高速链路,可实现交互数据的高速传输。由此得出其主要单元包括:定位解算单元、修正信息交互单元、GNSS定位单元及辅助单元中的通信接口。
3.1 定位解算单元
定位解算单元是RTK定位解算的核心部件,具备高速计算能力的中央处理器(Central Proces-sing Unit, CPU)是该单元设计的重点。除了高速的运算能力之外,为了系统后续的扩展性,还需要支持嵌入Linux系统,方便后续程序调试与升级。为保证数据运算的实时性,需集成高速串口、USB、CAN总线、以太网和高精度的时钟信号。基于上述需求,选用广州创龙公司设计的基于ARM+DSP架构的AM5728核心板为定位解算单元。
具备高速计算能力的AM5728完成对GNSS定位单元传输GNSS信息的预处理以及通过通用异步收发传输器(Universal Asynchronous Receiver/Trans-mitter, UART)接收修正信息交互单元传输的定位修正信息,并基于Linux系统上的双差RTK定位程序解算出当前基准站的导航信息。此外,AM5728通过SPI通信方式将RTK接收机当前的工作状态发送给GD32F103处理器,通过GD32F103控制指示灯表示对外输出高速串口的通信状态与当前导航状态的稳定性。
3.2 修正信息交互单元
为提高系统工作的灵活性,修正信息交互单元采用冗余式设计方法,针对不同工作范围,选择杭州塔石公司设计的TAS-LORA-181或TAS-E20V。修正信息交互单元模式选择示意图如图2所示。
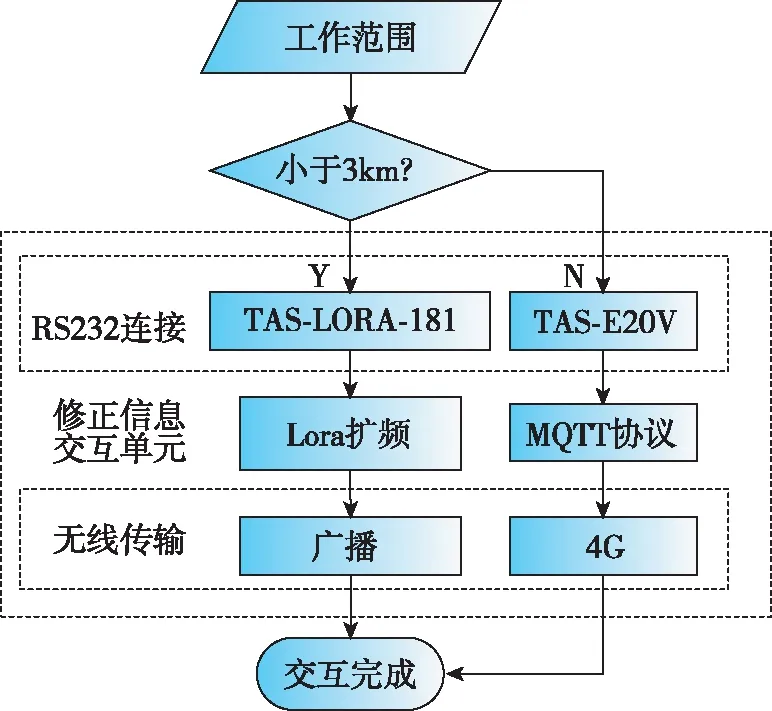
图2 修正信息交互单元模式选择示意图Fig.2 Diagram of pattern selection of modified information interaction unit
针对近距离(<3km)通信时稳定性与功耗问题,修正信息交互单元采用TAS-LORA-181进行交互。TAS-LORA-181作为无线串口中断采用Lora扩频技术,通过RS232与定位解算单元相连,实现近距离定位修正信息在基准站与流动站之间的实时传输。
针对中远距离(≥3km)通信实时性、稳定性与可靠性问题,修正信息交互单元采用TAS-E20V。TAS-E20V支持消息队列遥测传输(Message Queuing Telemetry Transport, MQTT)协议,该协议的低开销、低带宽特点极大节约了AM5728的运算消耗;此外,修正信息经TAS-E20V以4G传至定位解算单元,提高了系统实时性。中远距离信息交互过程如图3所示。

图3 中远距离修正信息交互示意图Fig.3 Medium and long distance correction information interaction
由图3可知,定位解算单元中的定位修正信息来自于修正信息交互单元,修正信息交互单元基于UART将信息传输至定位解算单元。在RTK基准站中,通过TAS-E20V与定位解算单元结合,将修正信息通过UART实时传输至TAS-E20V后,基于4G网络传输至RTK流动站。此外,为方便远程调试以及监控单元状态,交互单元设计有短信与网络两种指令工作模式,可以基于短信或Internet实时配置修正信息交互单元,实时远程监测、调整修正信息交互单元,从而进一步提高系统稳定性与可靠性。
3.3 GNSS定位单元
GNSS定位单元是RTK定位系统的重要信息来源,其输出的原始观测信息是RTK定位的基础。因此,保证稳定捕获跟踪卫星信号及稳定可靠获取定位信息是GNSS定位单元设计的关键环节。
为了在兼顾系统兼容性的同时保证系统的可靠性和稳定性,采用冗余式方法设计GNSS定位单元,不仅具备双GNSS板卡热冗余备份的工作方式,而且可以基于高覆盖的GNSS板卡选型提高系统兼容性。基于不同的环境要求,RTK精密定位系统选择不同的板卡配合完成任务:针对要求全面支持北斗三号卫星、全星座全频点定位且支持RTK星链续航时,装载P40;针对RTK作业距离50km左右、E-RTK测量作业距离300km左右且要求高可靠载波精度时,装载K708;针对支持全系统全频点且要求1s内完成RTK重新捕获以及热启动时,装载UB482;针对要求厘米级差分定位并支持SPAN GNSS+INS组合导航技术时,装载OEM719;针对要求1mm的载波相位观测值、厘米级高精度RTK定位且支持全系统全频点时,装载UB4B0M。因此,针对复杂的环境要求,GNSS定位单元以不同系列的五款GNSS板卡(P40、K708、UB482、OEM719、UB4B0M)为例,采用冗余式通信接口复用方式展开设计。根据定位单元的工作状态,采取远程操作方式切换系统内热冗余备份的另一套GNSS定位板卡完成GNSS信号处理作业,从而提升系统的可靠性和稳定性。
基于此,系统通过GNSS板卡对卫星天线接收的导航信息进行捕获解算,结合各高精度定位板卡的情况,GNSS定位单元通信接口关系如图4所示。
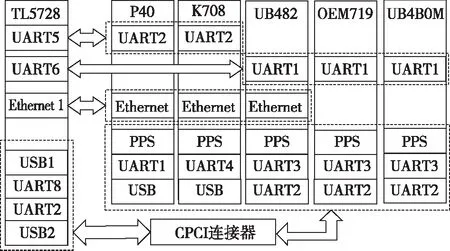
图4 GNSS定位单元通信接口关系图Fig.4 Communication interface diagram of GNSS positioning unit
3.4 辅助单元
为了提高系统的普遍适用性,各单元间采用复合型高速链路进行通信,通过串口、以太网、CAN实现数据交互,通过USB实现数据的冗余存储备份。因此,RTK系统共有UART、USB、CAN、Ethernet四类对外通信接口。其中,UART、USB、CAN均满足高速数据交互的要求。以太网是RTK定位系统的调试接口,可以远程登入RTK定位系统的Linux操作系统,方便随时对系统进行调试,并且可以通过SSH对Linux系统中的数据进行读写以及对系统内程序进行升级。基于复合型高速链路的设计方法,提高了系统各单元间通信的稳定性与可靠性。RTK定位系统通信接口如图5所示。
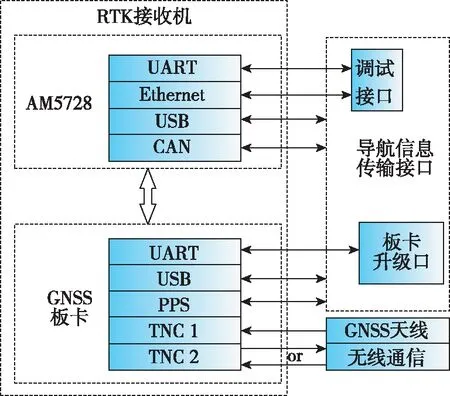
图5 RTK定位系统通信接口示意图Fig.5 Communication interface of the RTK positioning system
2个外接TNC天线接口采用标准同轴电缆工艺,TNC1负责连接GNSS天线,TNC2负责连接TAS-E20V与TAS-LORA-181,发送、接收修正信号。此外,预留UART接口以满足后续因卫星导航水平提高而可能产生的GNSS板卡固件升级需求。
4 实验测试及性能考核
为考核基于RTK精密定位系统的性能,设计了定位性能考核实验,以经过多频多模全球卫星导航定位系统多重标定的精准定位结果为参考,通过对比RTK定位结果与定位参考的最大位置误差、平均位置误差以及CEP结果,评估RTK精密定位系统的可靠性与精准性。RTK定位系统的卫星天线摆放地点要与定位参考点完全重合或尽量接近。然而,由于2个天线存在高度差,如果摆放过近会使得二者相互遮挡,进而影响卫星信号质量及连续性。为精准确定卫星天线的最佳摆放距离,针对智能天线和参考卫星天线的实际摆放位置进行了多次实验,摆放距离在15~25cm为宜,因此,选定卫星天线的摆放距离为15cm。为避免环境因素影响,流动站装于实验车上,周围无明显遮挡物。图6给出了实地测试情况图。图7给出了RTK定位实测偏差结果。

图6 实地测试情况图Fig.6 Pictures of field test

图7 RTK定位实测偏差结果Fig.7 Results of deviations in RTK positioning measurement
如图7所示,在东、北、天向上,根据位置偏离误差的波峰与波谷可以看出,数据整体在±0.05m范围内波动,为进一步分析系统稳定性与可靠性,计算最大位置误差、平均位置误差以及实验数据标准差,表1所示为东、北、天向的位置偏离误差。

表1 位置偏离误差
由表1可知,系统最大位置误差为0.0496m,平均位置误差最大为0.0056m,均在可接受范围内。基于实验数据标准差,东向、北向实测的CEP值为0.0071m,天向的标准差比东北天的标准差有所增加,这是由于单天线导航系统不利于精准测量高程信息导致。因此,RTK精密定位系统具备连续稳定可靠的精密定位能力,可实时输出精密定位结果。
5 结论
本文针对RTK定位系统存在的稳定性、可靠性差与系统兼容能力低等问题,提出了高稳定高可靠多平台兼容RTK精密定位系统设计。硬件平台实现以及后续实验验证表明:
1)基于冗余性设计方法的RTK定位系统设计思路具备可行性。本文设计的GNSS定位单元通过冗余性设计方法解决了单一RTK系统仅支持单一GNSS板卡的兼容性问题,为后续解决多平台兼容问题提供了思路。
2)基于ARM+DSP架构的RTK精密定位解算架构实现了RTK实时精准解算,复合型高速通信链路确保了各单元间实时有效信息交互,通过CEP评估标准评估RTK定位精准性,其CEP=0.0071m,并且定位结果连续稳定输出。
3)本文提出的修正信息交互方法采用广播与4G两种传输方式相互切换使用,后续在实时性要求更高的场合,可以增加5G传输方式,进一步提高修正信息传输的实时性。
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
高技术通讯(2021年3期)2021-06-09 06:57:24
法律方法(2019年4期)2019-11-16 01:07:28
测控技术(2018年3期)2018-11-25 09:45:46
测控技术(2018年12期)2018-11-25 09:37:42
电测与仪表(2017年24期)2017-12-19 05:15:16
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
北京航空航天大学学报(2017年12期)2017-04-23 08:31:39
火控雷达技术(2016年3期)2016-02-06 02:30:33
