基于驾驶性的车辆蠕行加速度信号处理方法研究
2022-03-26 07:06:12莫易敏
数字制造科学 2022年1期
莫易敏,熊 钊,王 骏,2,胡 恒
(1.武汉理工大学 机电工程学院,湖北 武汉 430070;2.上汽通用五菱汽车股份有限公司,广西 柳州 545007)
驾驶性是驾驶员对驾驶员与车辆之间相互作用的复杂主观感知[1],而车辆蠕行是车辆启动过程中的一个常见工况,通常发生在驾驶员释放制动踏板,变速器挂空挡,并且不施加油门这段时间,由于车辆从静止变为运动,车辆的加速度突然提升以及起步后的加速度波动必然会对驾驶员的主观感知产生影响,因此车辆蠕行品质是整车驾驶性不可忽视的因素,值得相关汽车厂商进行深入研究。
目前基于工况的驾驶性研究主要集中在驾驶性主客观评价上[2],关于车辆蠕行的研究仅限于客观指标的评价方法研究[3],与客观指标值相应的原始数据处理方法研究较少。因此笔者在分析蠕行控制机理的基础上选定驾驶性客观指标,之后对试验取得的原始加速度信号进行处理,通过对驾驶性信号预处理常用数字滤波方法与笔者选定的小波阈值去噪、加权平滑滤波方法得到的参数值波动情况对比,确定蠕行起步整体客观评价指标的信号处理方法。
1 蠕行驾驶性评价指标选取
起步工况的低速蠕行是在平坦路面上,依靠发动机的怠速转速,通过变速箱(自动变速箱、部分无级变速箱依靠液力变矩器传递动力,离合器断开,双离合变速箱挂挡离合器连接)传递至主动轮,实现车辆缓慢平稳运行。分析车辆蠕行控制机理[4],可得到起步蠕行客观评价指标为:
(1)制动踏板释放响应延迟。释放制动踏板到车辆进入运动状态所需要的时间、加速度大小相较于静止状态上升超过设定值时,称为进入运动状态。
(2)制动踏板释放加速度跳跃。车辆进入运动状态后第一次到达局部最大加速度时,指标包含局部最大加速度与静止时加速度的差值,以及上升到局部最大加速度所需要的时间两个参数。
(3)制动踏板释放后振喘。当车辆蠕行起步实现加速度跳跃,并到达第一次加速度峰值后,车辆开始出现振喘现象,表现为汽车有规律的前后震动,振喘客观评价指标包含3个参数:加速度振喘均方根值(root mean square, RMS)、加速度波动幅值、振喘的平稳性(vibration dose value, VDV)。一般选取加速度跳跃,并到达第一次加速度峰值为初始时间,之后的第二个波峰为结束时间(此处的波峰数可以根据情况选取,但初始时间不变),分析这段时间的振喘参数计算方法如下:
(1)
(2)
(3)

均方根值主要反映振喘的总体平均幅度,波动幅值以及平稳性均反映的是振喘的极端情况。
学生根据教师指导修改后的方案进行实施。实际操作过程中,由于刚长出的根难以准确判断,所以学生只选择根的总长度作为观察指标。所获取的实验结果见表4。
(4)加速扰动。蠕行的加速扰动考虑的时间范围是制动释放为开始,当车辆速度超过蠕行限值时结束。客观评价指标的参数包含扰动能量占比,通过处理的加速度信号与扰动信号进行傅里叶变换后的能量谱比值得到。
2 驾驶性指标信号采集
确定蠕行的驾驶性评价客观指标后,需要采集的信号包括汽车纵向行驶整车速度、加速度、油门踏板开度和制动踏板闭合信号。
2.1 整车基本参数
试验车辆采用某企业专门用于测试的车辆,行驶里程均在1 000 km,已度过磨合期,能最好地发挥车辆的性能。试验车参数如表1所示。
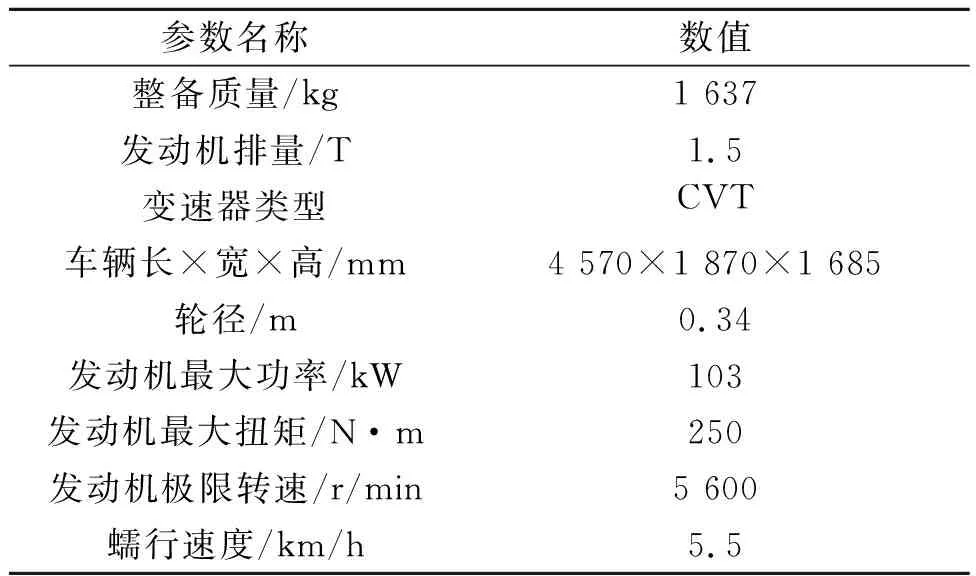
表1 试验车参数表
2.2 测试设备
采用AVL-Drive相关测量设备,测量系统硬件组成如图1所示。由于试验车辆为某企业研制车型,可以直接从ECU(electronic control unit)中读取制动踏板以及油门踏板信号,因此实际测量时测量系统只需要1、2、3、5、9、10这6个设备, ECU的转数与踏板信号通过扩展的CAN(controller area network)通信协议接口传递至驱动主机;最后通过USB接口将汇总的信号传递至电脑端。驱动主机接线如图2所示,连接表如表2所示。
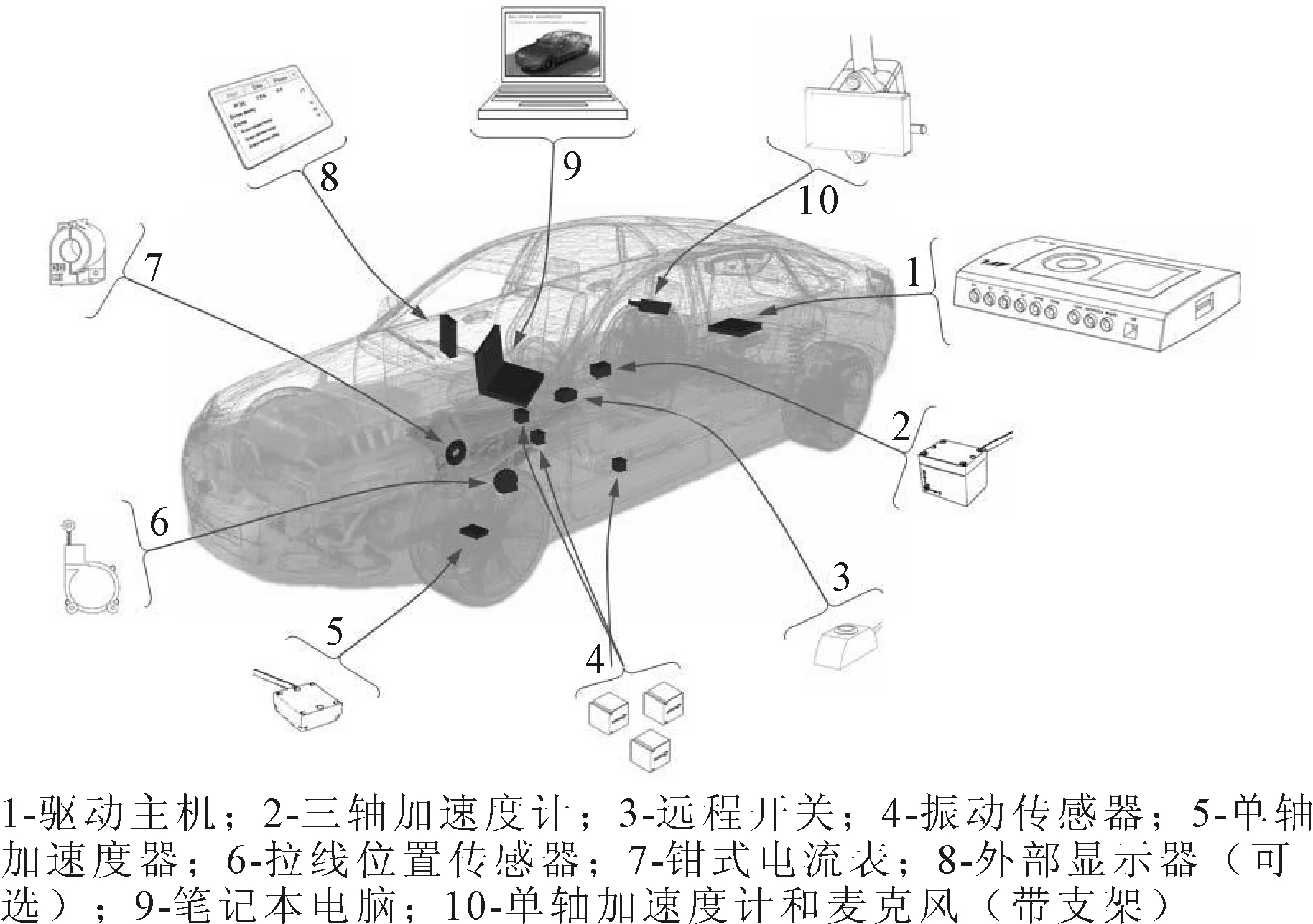
图1 测量系统硬件组成图
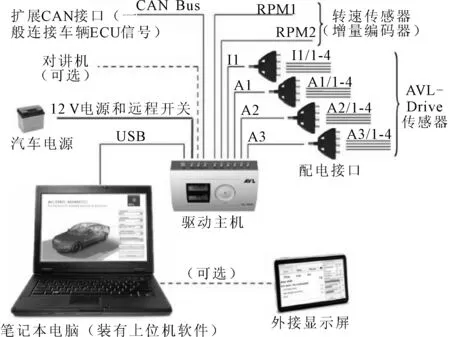
图2 驱动主机接线图
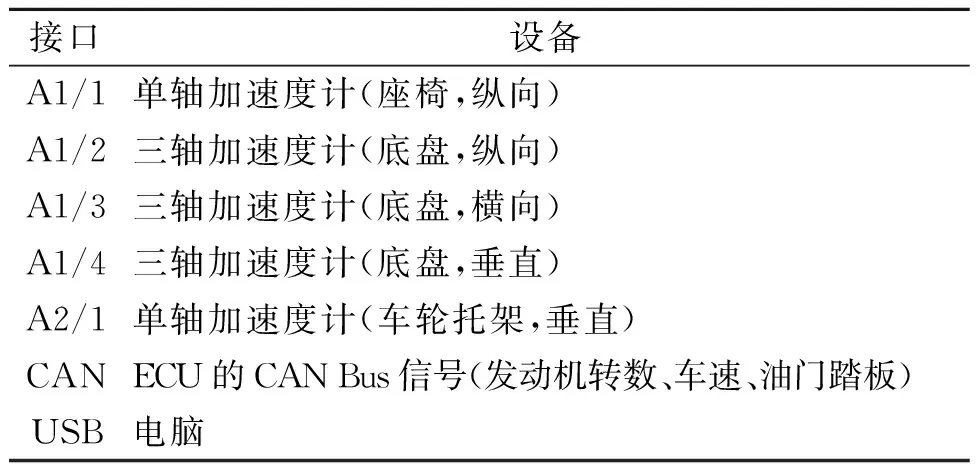
表2 驱动主机接线接口表
2.3 测试条件
测试时的驾驶员是有经验的车辆驾驶评测师。车辆在已热车状态下踩制动踏板为车辆测量的初始状态。
试验在某新建纵向直道上进行(直道满足国家技术要求),室外风速要求小于3 m/s,温度为25±5 ℃,周围环境的气压为101.3 kPa,测试在满载(280 kg)条件下进行。
3 蠕行加速度信号处理
3.1 原始加速度信号分析
试验车辆3次起步蠕行的原始加速度信号如图3所示,从图3可知,在车辆静止时,虽然事先已经进行了加速度调零,但由于高频噪声的存在,静止时仍出现了加速度小幅波动,3次试验时静止最大加速度波动为0.097 4 m/s2,试验车的运动状态加速度增量设置为0.1 m/s2,当进入运动状态后,车辆本身的振喘现象又会与噪声一起对加速度信号产生干扰,得到的加速度曲线振荡在起步后依旧很强烈,因此原始信号是不能直接用于客观指标参数提取的。
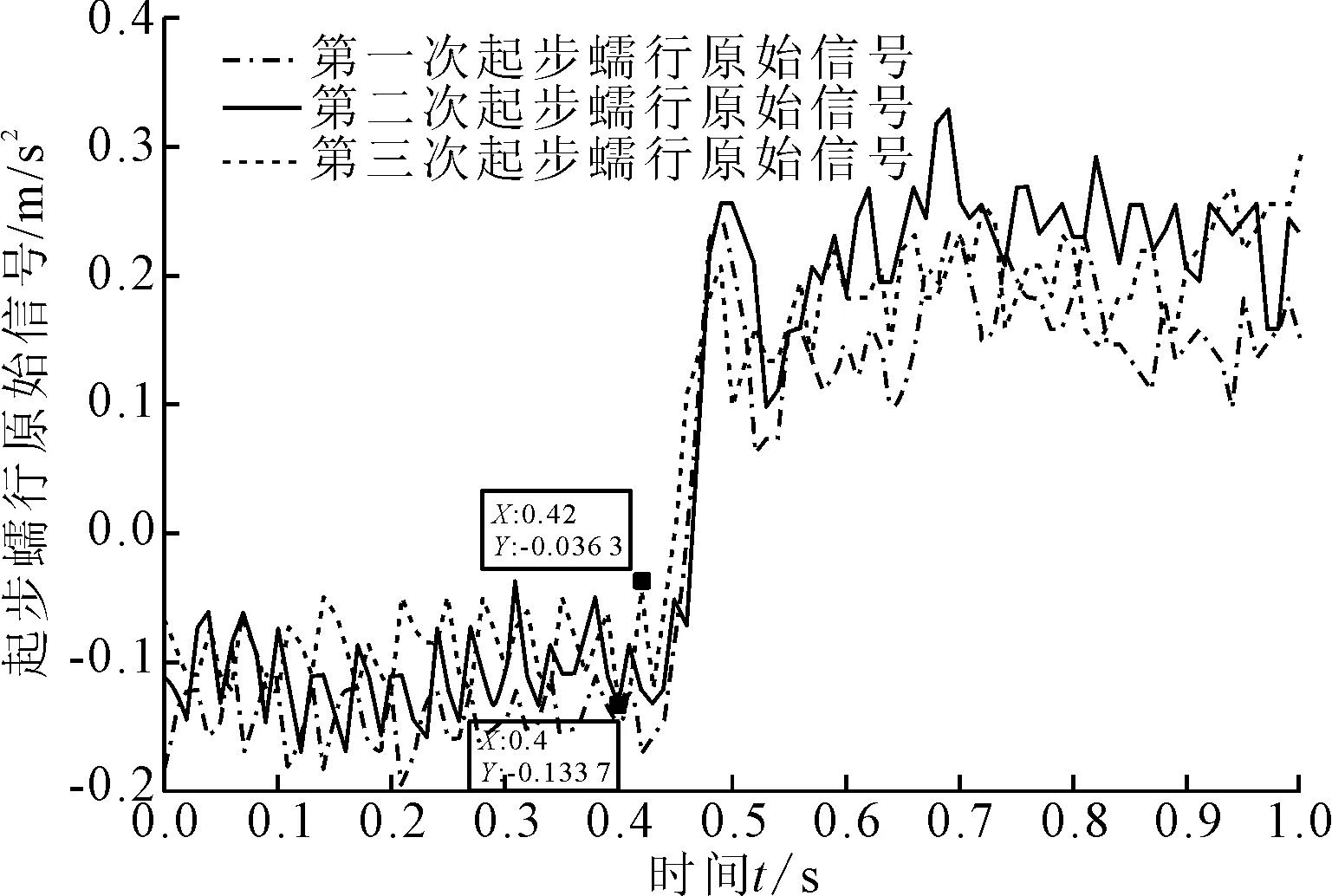
图3 3次起步蠕行原始加速度信号
常规的处理方式一般采取基于傅里叶变换的数字滤波,相关学者则采用小波去噪以及EMD(empirical mode decomposition)分解等方法进行原始数据处理,处理的目的均是从原始信号去噪出发,得出噪声最少的信号用于客观指标的参数提取[5]。
从驾驶性定义出发,车辆的高频扰动是会影响驾驶员的主观感知的,并且不同的客观指标参数的提取所需的信号类型也有差异。因此将根据评价指标的特点,进行数据处理,选取合适的处理方法,处理方法主要依据同一车辆相同工况下多次试验后得到参数值的波动情况来选取。
蠕行的4个客观指标中,制动踏板释放延迟以及加速度跳跃指标参数与时间有关,反映的是车辆起步过程。高频噪声与低频振喘等信号会造成加速度突变,这对多次相同试验时的参数值产生影响,因此该类指标需要加速度曲线尽可能平滑;而振喘指标主要讨论车辆低频振喘(一般频率在2~10 Hz范围内)[6],要排除高频扰动,因此需要保留低频扰动;加速扰动指标则是将扰动能量纳入考量,需要将原始加速度信号进行分解。
3.2 制动踏板释放响应延迟、加速度跳跃信号处理
由于客观指标参数与时间有关,过程类指标信号处理需要加速度信号尽可能平滑,而常见的数字滤波方法中,相较于IIR(infinite impluse response)数字滤波方式,FIR(finite impulse response)数字滤波后数据为线性延时,进行延时修正后,是不会影响信号的时间特性的,这对参数的稳定性有重要影响,此外将加权平滑滤波以及小波分解去噪方法也纳入考量。
加权平滑滤波,主要参数是加权节点数目的确定[7],多次试验最佳节点选为20个,FIR数字滤波为2 Hz低通滤波,带阻为10 dB,采用参考文献[8]中的线性时延计算方法得到线性延时为0.58 s;根据小波分解去噪原理[9-10],笔者主要构造的97双正交小波,采样频率为100 Hz,目标频率为2 Hz,因此选取分解层数为4层,对第4层逼近信号(频率0~3.125 Hz)进行软阈值去噪,阈值选择自适应阈值。响应延迟与加速跳跃指标原始数据处理对比图如图4所示。
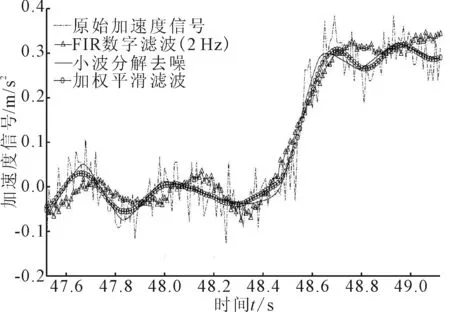
图4 响应延迟与加速跳跃指标原始数据处理对比图
从图4可知,小波分解去噪与加权平滑滤波得到的加速度信号较为平滑,FIR数字滤波信号由于通带在0 dB波动,因此滤波后数据存在振荡,将试验车3次蠕行信号分别进行图4所示的3种处理方法,并提取客观指标参数,将加速度跳跃的两个指标处理后,变为平均加速度变化率,如表3所示。
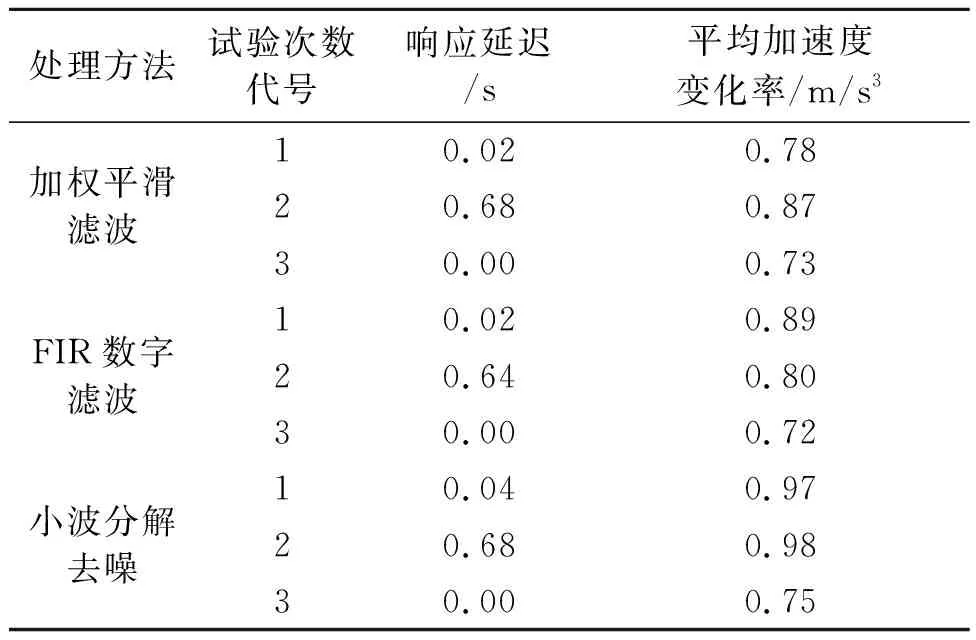
表3 3种方法处理数据参数值
3次相似条件试验,对于响应延迟与加速度跳跃指标的参数,加权平滑滤波数据处理得到的客观指标参数数值相对波动最小(响应延迟第二次试验数据可以看做粗大误差,不纳入考量)。
3.3 振喘指标信号处理
振喘指标所需的加速度信号需要保留低频扰动,消除高频扰动,由于指标参数与时间无关,需要精确的计算速度值,数字滤波方式中虽然FIR有线性相位,但由于振喘指标与时间无关,而FIR滤波的幅频精度相较于IIR数字滤波有所不足,因此选择能更好保留加速度精度的IIR数字滤波,采取10 Hz低通滤波,带阻与构造模型不变;小波分解去噪与所需信号的频率范围有关,由于要保留10 Hz以下信号,采取2层小波分解,对第2层的逼近信号进行软阈值去噪,参数与之前相同;由于加权平滑滤波主要目的是将振荡信号变平滑,不满足振喘指标的要求,在此处不使用该方法进行数据处理。
图5为使用IIR数字滤波与小波分解去噪后的加速度曲线,可以看出IIR数字滤波会明显的出现非线性延时,但是由于提取振喘客观指标的参数是没有影响的,其滤波后幅值特性很好;而对应的小波阈值去噪保留了较多的加速度特征,但加速度幅值精度相对较小。
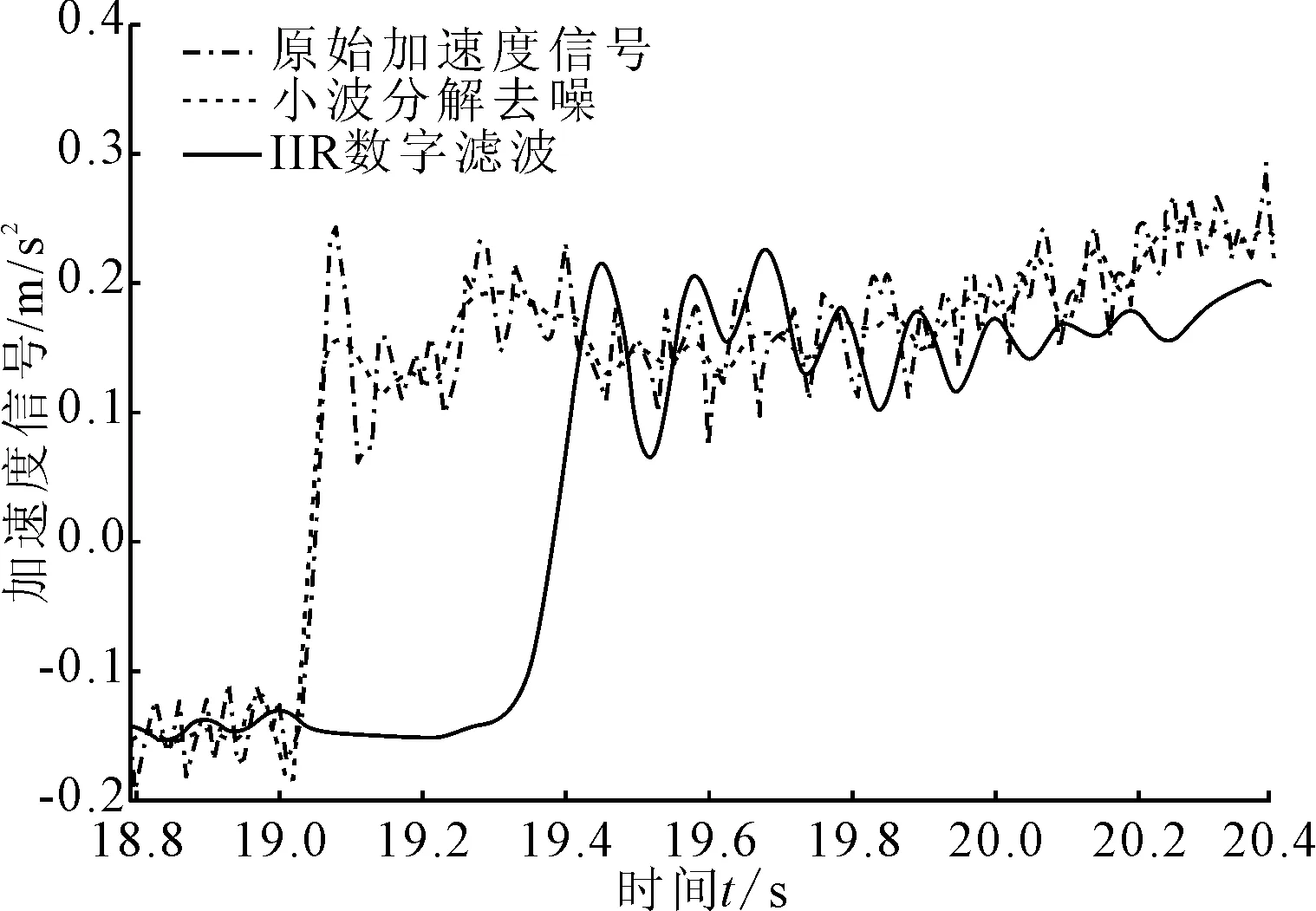
图5 振喘指标原始数据处理对比图
将试验车3次蠕行信号分别进行图5所示的两种处理方法并提取客观指标参数,如表4所示。
表4中两种方法的振喘指标参数数据中小波阈值去噪的信号参数值相对较小,且分布相对集中,相对波动较小,因此提取振喘指标参数选用小波阈值去噪较好。
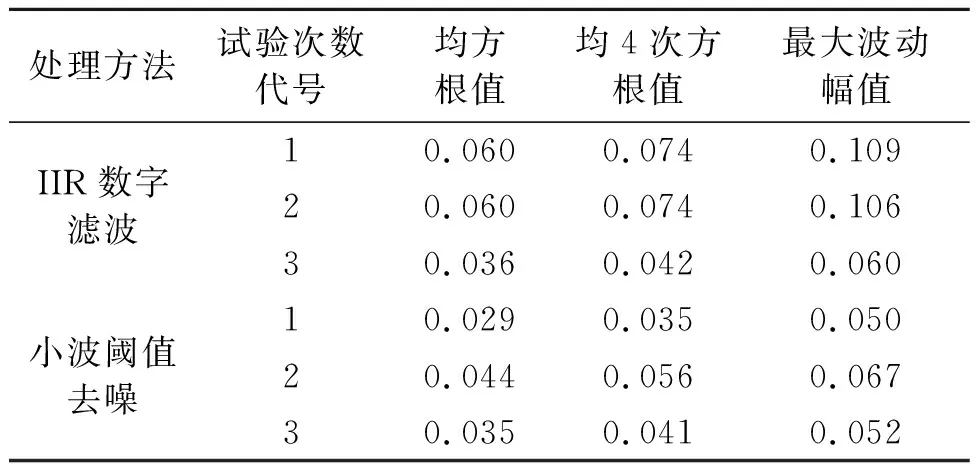
表4 两种方法处理数据参数值
3.4 加速扰动指标信号处理
加速扰动指标参数为扰动能量占比,由于采取FIR高通滤波时,得到的扰动信号与IIR与小波去噪分解得到的扰动信号差异较大,此处主要选取IIR数字滤波以及小波阈值去噪。由于需要采集的信号为扰动信号,IIR数字滤波采用2 Hz高通滤波,其余参数不变;小波分解阈值去噪,沿用延时响应时的处理方法,在处理完后,需要将第4层逼近信号的噪声与1、2、3、4层高频分量相加,共同组成扰动信号。
扰动信号与理想加速度信号频谱图如图6所示,点画线为去扰动加速度信号的频谱图,车辆蠕行时加速扰动包含高频噪声,以及车辆自身的低频扰动(振喘),因此去扰动信号又称为理想加速度信号,其能量主要集中于低频段,去噪得到的扰动信号频谱,能量主要集中在高频段区域,扰动能量与理想加速度频谱能量比值能从整体上客观的反映蠕行过程中,扰动对整车工况的影响,扰动能量比值越小,表明动力系统动力传递越平稳。

图6 扰动信号与理想加速度信号频谱图
同样的3次蠕行试验后,得到扰动能量比如表5所示。
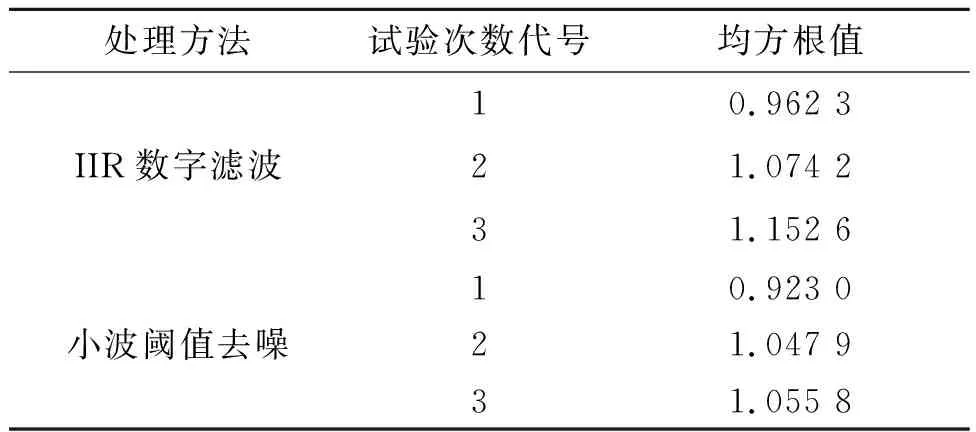
表5 扰动能量比
从表5可知,小波分解去噪得到的扰动比参数整体值较小,这是由于IIR滤波在阻带内带阻是缓慢下降的,导致所得扰动信号值偏大,而小波分解去噪能根据频率很好地进行分解;小波分解去噪所得信号提取的参数波动较小,因此针对加速扰动指标,选取小波分解去噪方法。
4 结论
(1)根据选取的蠕行客观评价指标进行了参数定义,并搭建了信号测量平台。
(2)分析试验测量的原始加速度信号,按客观评价指标参数特性将指标分为3类分别进行数据处理。
(3)根据客观指标,选取加权平滑滤波、小波阈值去噪与驾驶性常用的预处理方法(数字滤波,FIR、IIR)进行指标参数提取,其中响应延迟与加速跳跃宜采用加权平滑滤波;振喘与加速扰动宜采用小波分解去噪;并对原有的数字滤波预处理方法进行了改进。
猜你喜欢
化工自动化及仪表(2024年4期)2024-01-01 00:00:00
数学物理学报(2022年4期)2022-08-22 04:06:36
数学物理学报(2019年4期)2019-10-10 02:38:56
电子制作(2019年24期)2019-02-23 13:22:40
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
物联网技术(2015年10期)2015-11-10 09:42:19
电源技术(2015年11期)2015-08-22 08:50:38
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
电子设计工程(2014年20期)2014-02-27 12:01:00