一类平面五次扰动系统的极限环分支
2022-03-26 07:52杨春妮洪晓春
云南民族大学学报(自然科学版) 2022年2期
杨春妮,洪晓春
(1.陕西师范大学 数学与统计学院, 陕西 西安 710119;2.云南财经大学 统计与数学学院, 云南 昆明 650221)
为了解决希尔伯特第16问题,Aronld于1990年提出了弱化的希尔伯特第16问题[1],即研究扰动系统的Abel积分孤立零点个数的上界问题.在此之后的几十年里,大量学者对Abel积分零点个数问题进行了研究,也获得了很多优秀成果,但是此问题也没有得到彻底解决.
对于四次哈密顿系统
(1)
其中a,b,c∈.文献[2]证明了系统(1)在(α+βx+γx2)y扰动下的极限环个数至少是2.
对于扰动的三次系统
(2)
文献[3]证明了系统(2)的极限环个数不超过12.
对于扰动的三次系统
(4)
文献[4]使用判定函数方法[5]及数值模拟方法[6]得出系统(4)可以同时分支出3个极限环,而且给出了3个极限环的具体位置.
对于扰动的四次系统
(5)
文献[7]使用判定函数及数值模拟的方法得出系统(5)可以同时分支出3个极限环.
对于扰动的五次系统
(6)
文献[8]使用判定函数及数值模拟的方法得出系统(6)可以同时分支出3个极限环.
对于扰动系统
(7)
其中R(x,y,λ)=mx2+ny2+ky4-λ.文献[9]使用判定函数及数值模拟的方法得出系统(7)可以同时分支出15个极限环,而且给出了15个极限环的具体位置.
对于五次哈密顿系统
(8)
文献[10]对系统(8)相图情况进行了分类,分为a,b,c,d,e,f,g7种情况.进一步证明了系统(8)在任意n次多项式扰动下的极限环个数不超过54n-13.

(9)
其中0<ε≪1,a0,a1,a2,a3∈.当a3=0时,文献[11]得出系统(9)可以同时分支出3个极限环,给出了出现双尖点极限环的情况.
继续使用判定函数及数值计算的方法,得出系统(9)可以同时分支出4个极限环.当ε=0.001,a0=-0.231 771,a1=-2,a2=2.8,a3=-2.6时,使用数值模拟方法给出了4个极限环的具体位置,同时呈现了双尖点极限环.
1 对非扰动系统的定性分析
这一部分,将对系统(9)所对应的非扰动系统的性态进行分析.
系统(9)对应的非扰动系统为
(10)


图1 非扰动系统(10)的相图
系统(10)的首次积分为
(11)

由(11)得
(12)
当y=0时,由(11)得
x6-3x4+3x2-6h=0.
(13)
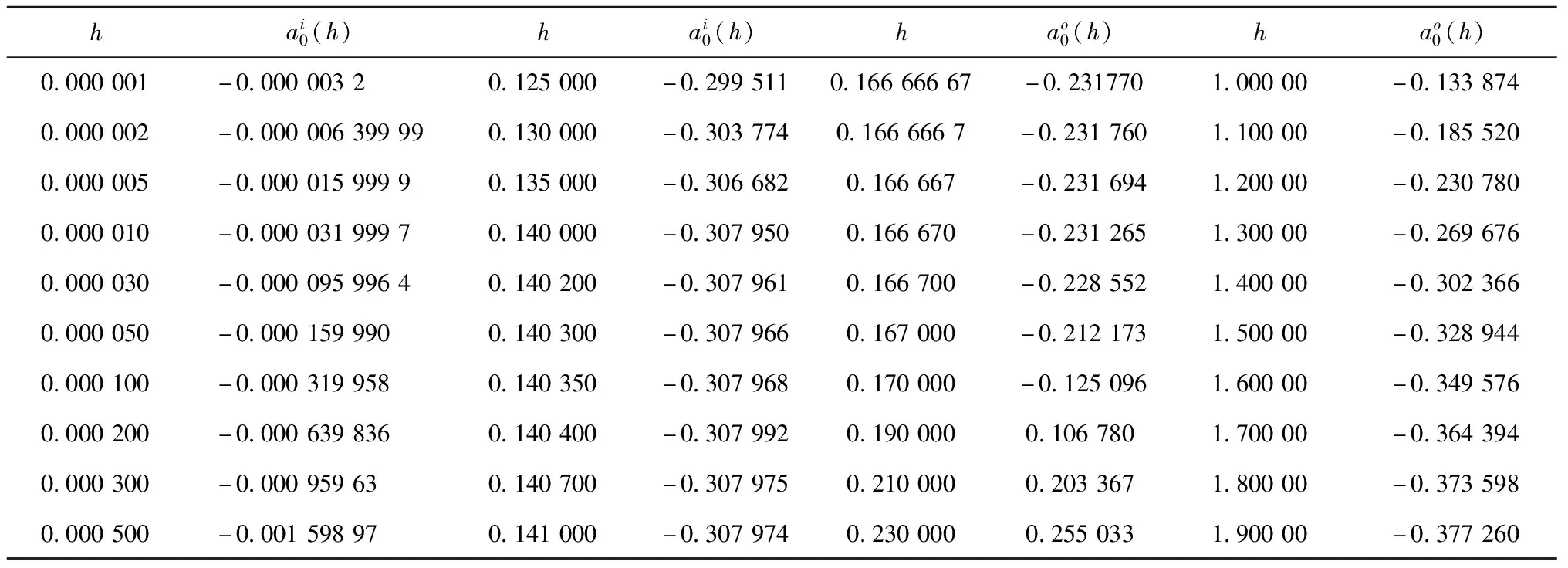
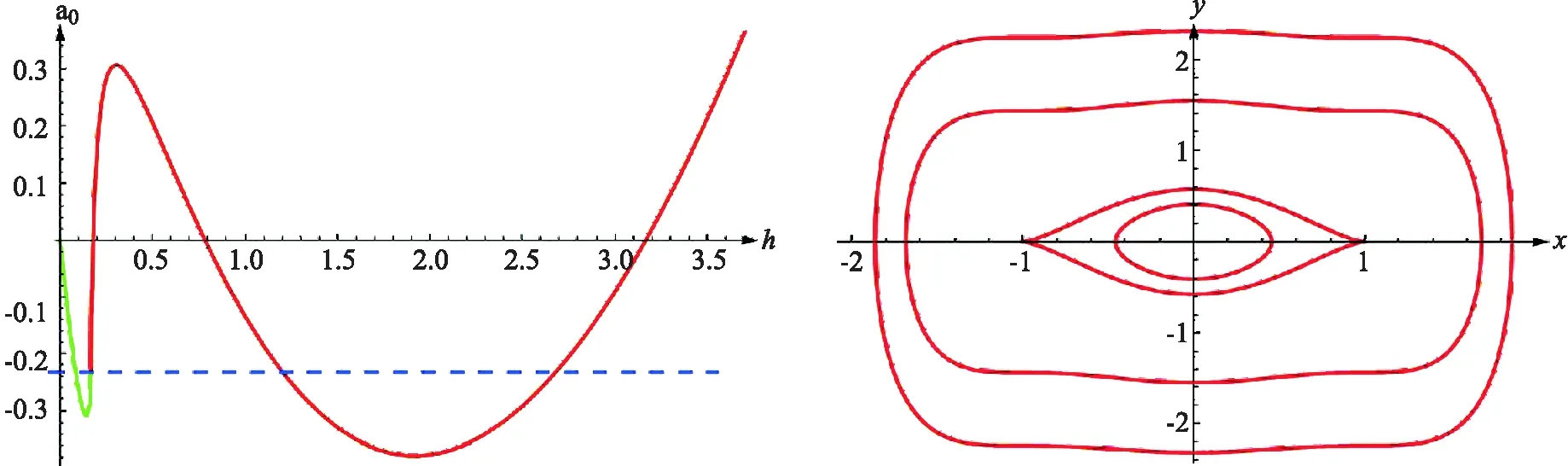
对于任意给定的h(0 这一部分,将引入扰动系统的判定函数、判定曲线等概念,以及需要使用的定理. 文献[5]中研究了扰动系统 (14) 其中p(0,0)=q(0,0)=0.系统(14)的Abel积分为 A(h)=∮Γhy[q(x,y)-λ]dx-x[p(x,y)-λ]dy. (15) 令Abel积分A(h)=0,使用格林公式,我们得到 (16) 其中Γh(D)表示闭曲线Γh所围的区域.函数λ(h)称为扰动系统(14)的判定函数,判定函数对应的图像称为判定曲线. 定理1[12]对于任意给定的λ0, (i)如果点(h0,λ(h0))是直线λ=λ0与判定曲线λ=λ(h)的交点,且λ′(h0)>0(<0),则当λ=λ0时,系统(14)在Γh0附近有一个稳定(不稳定)的极限环. (ii)如果直线λ=λ0与判定曲线λ=λ(h)没有交点,则当λ=λ0时,系统(14)没有极限环. 同理,如果随着h的增加,Γh向内收缩,则极限环的稳定性与之相反. 这一部分,将给出扰动系统(9)的判定函数及判定曲线,使用判断曲线得出结论,再用数值模拟方法对结论进行了检验,给出极限环的具体位置. 对于扰动系统(9),可得其Abel积分为 A(h)=∮Γh(a0+a1x2+a2y2+a3x2y2)ydx. (17) 对于(17),使用格林公式得 A(h)=∬Γh(D)(a0+a1x2+3a2y2+3a3x2y2)dxdy. (18) 令A(h)=0,由(18)可得2个判定函数如下: (19) (20) 当a1=-2,a2=2.8,a3=-2.6时,由(12)、(13)、(19)、(20),得判定函数如表1. 表1 当a1=-2,a2=2.8,a3=-2.6时, 扰动系统(9)的判定函数 由表1表示的函数,可以得系统(9)的判定曲线见图2.由定理1及系统(9)的判定曲线,可以得出以下定理. 图2 扰动系统(9)的判定曲线 图3 系统(9)的4个极限环图 定理2对于扰动系统(9),当a1=-2,a2=2.8,a3=-2.6,0<ε≪1时,由系统的判定曲线,可得到以下结果. (i)当a0>0.307 368 或a0=-0.377 335 时,系统有1个极限环. (ii)当-0.377 335 (iii)当0≤a0<0.307 368 或a0=-0.307 992 时,系统有3个极限环. (ⅳ)当-0.307 992 特取a0=-0.231 771,a1=-2,a2=2.8,a3=-2.6,ε=0.001,使用数值模拟方法得到系统(9)的4个极限环,由大到小的极限环顺次通过点(1.863,0),(1.684,0),(1,0)(即双尖点极限环),(0.4568,0),它们的稳定性顺次是: 稳定,不稳定,稳定,不稳定,其中1个是双尖点极限环,见图3. 使用定性理论和数值计算方法研究了扰动系统(9)的极限环分支情况,结果表明,在特殊五次扰动下,当a1=-2,a2=2.8,a3=-2.6,-0.307 992 以上内容为纯理论研究,对于许多实际问题,若系统能够出现稳定极限环,这是一种非常好的性态,例如在生物数学中,研究人员也研究这一类极限环问题,见文献[13,14,15]等.2 判定函数与判定曲线
3 扰动系统(9)的极限环分支

4 结语
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11汽车实用技术(2022年5期)2022-04-02黑龙江大学自然科学学报(2022年1期)2022-03-29煤气与热力(2022年2期)2022-03-09计算机系统应用(2021年10期)2022-01-06中学生数理化·高一版(2021年11期)2021-09-05北京航空航天大学学报(2021年7期)2021-08-13舰船科学技术(2021年12期)2021-03-29舰船科学技术(2021年12期)2021-03-29上海师范大学学报·自然科学版(2018年3期)2018-05-14