基于随机模型预测控制的插电式混合动力汽车多目标能量管理策略
2022-03-25 07:36孙蕾林歆悠莫李平
控制理论与应用 2022年12期
孙蕾 ,林歆悠 ,莫李平
(1.华侨大学机电与自动化学院,福建厦门 361021;2.福州大学机械工程及自动化学院,福建福州 350002)
1 引言
能源匮乏和环境污染的加剧促使传统燃油汽车向新能源汽车方向发展[1].插电式混合动力汽车(plug-in hybrid electric vehicle,PHEV)因其具有电池容量大、可外插充电、行驶里程长等优点,是目前新能源汽车的研究开发热点之一[2],其能量管理策略是影响整车燃油经济性和排放性的关键技术[3].传统基于车辆自身内部参数进行优化的控制策略对于发掘PHEV的燃油经济性和排放性的空间很小.因此,融合车联网信息,通过获取车辆外部环境信息并据此优化能量管理策略,以达到减少油耗和排放的目标,成为新能源汽车领域的研究热点[4–5].
传统的PHEV能量管理策略根据其实现方式,可分为基于规则和基于优化的能量管理策略两大类[6].虽然基于规则的控制策略算法简单、实时性好、控制成本低,但其难以达到全局最优[7].基于优化的能量管理策略主要有全局优化和瞬时优化两类.全局优化中,动态规划、二次规划等都受限于需预知工况,无法直接用于车辆的实时控制[8].以等效燃油消耗最小策略为代表的瞬时优化策略虽然执行效率高,但仍然存在等效系数最优取值困难的问题[9].
为了更好的实现对PHEV的控制,提升其燃油经济性,文献[10–12]采用模型预测控制(model predictive control,MPC)的方法,通过预测汽车在未来时间域内的动力需求,并进行优化得到最优转矩分配策略,从而改善汽车的燃油经济性和排放性.作为处理有约束最优问题最有效的方法之一,MPC已经被广泛运用于混合动力汽车的能量管理[13].但MPC用于能量控制时仍然存在以下两个需要进一步解决的问题:一是MPC的参考值应如何确定的问题;二是MPC在处理预测时域内的局部优化问题时在一定程度上追求全局最优.那么应如何考虑预测时域内求解的子问题和求解全局最优问题的关系.针对第1个问题,文献[14–17]将MPC和马尔科夫预测结合,构建随机模型预测控制(stochastic MPC,SMPC),通过对未来一段时间内的目标输出(踏板位置、需求车速、需求转矩等)进行预测,并将预测值作为MPC的参考值以提升控制效果.针对第2个问题,工业过程大多使用分层模型预测控制(hierarchical MPC,HMPC)的方法,在时间尺度进行规划,使得MPC趋向全局最优[18].
根据上述分析,本文针对一款插电式混合动力汽车,采用基于马尔科夫模型预测的车速和交通信息规划获取的电池参考SOC作为预测时域内的参考值与MPC进行结合,提出了一种多目标分层随机模型预测控制策略(multi-objective hierarchical stochastic MPC,M–HSMPC),并在构建的综合工况下进行验证分析,结果表明该策略能有效地改善整车燃油经济性和排放性.
2 插电混合动力汽车模型
2.1 车辆动力学模型
本文以一款插电式混合动力汽车为研究对象,其动力系统结构如图1所示.动力传输过程为发动机和电机动力耦合后直接输入主减速器,向驱动轮提供动力.由于发动机和电机处于同轴位置,发动机的转速和电机的转速总是相等的.因此,本文简化发动机和电机动力耦合部分和变速箱部分.
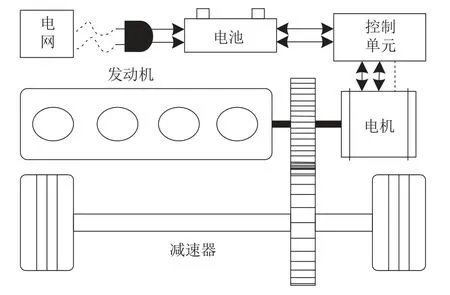
图1 插电式并联混合动力汽车结构Fig.1 Structure of PHEV
以发动机转速ωeng为状态变量,发动机输出转矩Teng、电机转矩Tmot和制动转矩Tbra为控制变量,构建系统状态方程如下:
式中:Ieng为发动机的转动惯量,其值为0.1 kg·m2;Itot为驱动电机的转动惯量,值为0.0203 kg·m2;Iwheel为车轮的转动惯量,值为3.1039 kg·m2;mr2为车辆直线加速的质量转化为车轮的转动惯量,值为211.75 kg·m2;i为传动比,其值为11;Treq为车轮需求转矩.车轮需求转矩为
式中:车辆总质量m为2800 kg,空气密度ρair为0.0129 g/cm3,车辆迎风面积A为1.9 m2,风阻系数Cd为0.25,滚动阻力系数f为0.0054,重力加速度g为9.8 m/s2,θ为道路坡度.
2.2 多元线性回归的发动机和电池模型
2.2.1 发动机模型
式中ai,bi和ci为多元非线性回归方程拟合系数.
表1为显著性概率α=0.05时发动机各指标多元非线性回归结果评价参数.由表1可知,各指标参数回归R2均大于0.7431,表明多元非线性回归模型能较好反映发动机的燃油消耗率和排放率,F检验值均大于阈值f,符合要求.图2为发动机燃油消耗率和排放率的原始数据曲面(网格稀疏)以及多元回归曲面(网格较密).

表1 显著性概率α=0.05时发动机各项参数多元非线性回归结果的评价参数Table 1 Evaluation parameters of multiple linear regression results of engine under significance probability α=0.05

图2 发动机燃油消耗率和排放率非线性回归模型Fig.2 Regression model of Engine fuel rate and emission rate
2.2.2 电池模型
本文忽略温度对电池的影响,采用一阶等效电路方法进行建模.电池的荷电状态(state of charge,SOC)和电池输出功率Pbatt计算如下:
式中:Vbatt,Rbatt和Qbatt分别为电池端电压、内阻和最大容量;ωmot为电机转速;ηmot为电机效率.
根据式(4)和式(5),结合SOC与电池内阻、电池与开路电压的关系以及电机效率,单位时间SOC消耗量dSOC如图3所示.由图3可观察可知,在某一确定电机转速下,dSOC和电机转矩大致成线性关系,而且这种线性关系随着SOC变化而变化.这种线性关系的变化主要是因为电池内阻和端电压随着SOC变化而导致.
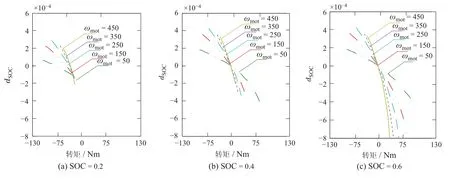
图3 在不同SOC下dSOC与电机输出转矩的关系Fig.3 Relationship between dSOC and motor output torque under different SOCs
图4所示为电池内阻和电池开路电压与SOC之间的关系.本文设置电池放电范围为[0.3,0.9],在此范围内电池内阻和端电压变化较小,故SOC对于电池模型的影响可以忽略.根据dSOC和电机转速、转矩关系数据,使用多元线性回归的方法获得线性的电池模型为

图4 电池内阻和开路电压与SOC的关系Fig.4 Relationship between SOC and battery resistance and open circuit voltage
该回归模型在显著性概率为0.05的情况下获得,其R2值为0.998,F检验值为200,大于阈值f=0,电池的回归模型结果符合要求.
3 多目标分层随机模型预测控制
3.1 多目标模型预测控制的建立
MPC使用的预测模型强调的是模型的功能而非模型的形式,即能够根据系统当前信息和未来控制输入,预测其未来输出值的模型均可用于MPC[20].本文选取计算速度高效的线性状态空间的模型作为预测模型,优化PHEV燃油消耗和排放量.根据式(1)–(2)(5)建立离散的状态方程,如式(7)所示.
式中:x为状态变量;u为控制变量;A,Bu和Bd为状态矩阵、控制矩阵和输入干扰矩阵;k为当前时刻.
忽略控制变量u对于目标函数的直接影响,建立多目标模型预测控制的优化过程如下:
其中:系统采样周期为1 s;Np为预测时域长度,取为5 s;Ny为输出的个数,取为6.由于燃油消耗和排放的拟合面在不同转速转矩下的差异变化,加入输出部分在价值函数中的权值Ω,Ω={Ω1,Ω2,Ω3,Ω4,Ω5,Ω6},分别代表实际车速和目标车速跟随效果的权值、燃油消耗的权重、CO排放的权重、HC排放的权重、NOx排放的权重以及实际SOC跟随参考SOC效果的权重.由于权重的取值可有多种组合,本文将其取值0或1,即在价值函数中是否考虑某一参数以进行简化.yj(k+i+1|k)为k时刻预测k+i+1时刻的输出;rj(k+i+1|k)为k时刻预测的k+i+1时刻的参考输出值;ρε和是松弛项;ε为控制时域长度,取为5 s;Nε是k时刻控制视距内的控制序列;Z∗k为最优控制序列;uj(k+Nc+1|k)是k时刻的控制序列中作用于k+Nc −1时刻的控制.
预测控制的约束条件为
3.2 马尔可夫车速预测模型建立
把整个行驶工况速度的变化视为一个马尔科夫链[21–22],当前车速只与上一时刻的实际车速相关,则马尔科夫链可建立如下:
式中:将速度分为了p个状态,Pi,j为t时刻车速为vi条件下,t+1时刻速度为vj的转移概率;mi,j为从速度vi转移到vj的次数;mi为从速度vi转移的次数.典型城市高速工况和城市低速工况下的概率转移矩阵如图5所示.

图5 不同工况下的概率转移矩阵Fig.5 Probability transfer matrix of different cycle
3.3 基于网联信息的参考SOC计算
对于PHEV的能量管理而言,控制其SOC的轨迹至关重要.为获取更优的参考SOC,本文基于网联信息,采用可用于实时控制的动态规划方法对参考SOC进行求解.
根据GPS,ITS等交通基础设施获取各路段的长度l、平均车速、车速标准差Sv、平均加速度以及加速度标准差Sa等数据,假设各段的速度和加速度均服从正态分布且相互独立,则速度加速度分布,以及发动机转速转矩的分布如下:
以电池SOC为状态变量,单位时间消耗的电池电量β为控制变量,在初始电池荷电状态SOC0给定的情况下,动态规划状态转移方程计算如下:
根据式(6)电池的线性回归方程,在单位时间消耗电量β下的电机平均转矩和发动机转矩以及发动机转矩的分布如下:
车辆的速度和加速度服从正态分布且相互独立,则可得知在某一β情况下发动机转速和转矩均服从正态分布且相互独立,由此估算第N个路段在某一β下的燃油消耗和排放量如下:
其中:mN,β∗为第N段路程在单位消耗电量为β时发动机燃油消耗和排放量(g);∗(ωeng,Teng)为发动机转速ωeng和转矩Teng下燃油消耗率和排放率(g/s);分别为第N段路程单位消耗电量为β时发动机转速和转矩的概率密度函数.
基于式(14),加入发动机燃油消耗和排放的权值ωFuel,ωCO,ωHC和ωNOx,建立用于动态规划的单步价值函数如下:
动态规划过程中总的价值函数为
运用动态规划求解使得JDP最小的控制序列
根据控制序列[β1β2··· βN−1βN],通过状态转移方程获得每个路段需要消耗的SOC,进而由线性插值的方法获得每个时刻参考SOC.
3.4 多目标分层随机模型预测控制策略构建
将基于马尔科夫模型预测的速度和利用交通信息规划获取的参考SOC作为预测时域内的参考值与MPC进行结合,构建多目标分层随机模型预测控制策略,其构架如图6所示.
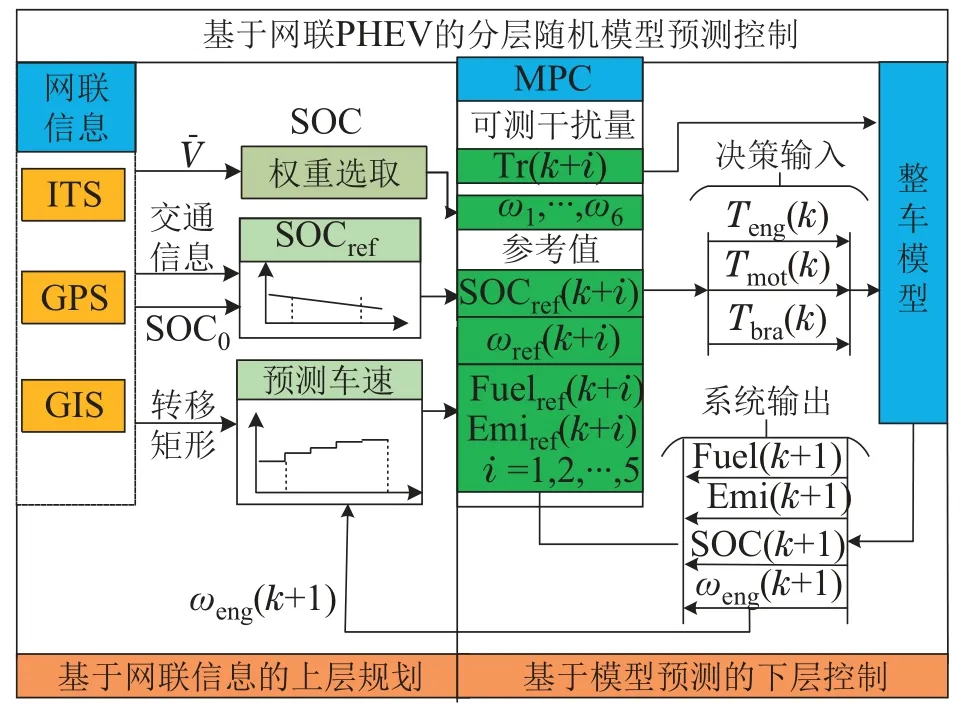
图6 多目标分层随机模型预测控制控制策略构架Fig.6 Structure of multi-objective hierarchical stochastic model predictive control
多目标分层随机模型预测控制策略控制过程可描述为:获取当前车辆速度后,选取一组适用于当前车速的MPC控制权值Ω={ω1,ω2,ω3,ω4,ω5,ω6}在获取车辆的初始SOC的前提下,结合网联信息提供的包括平均速度、加速度和各段里程等交通信息规划得到参考SOC.在给定当前车速情况下,由网联信息提供的当前的所属的工况结合马尔科夫的概率转移矩阵对未来车速进行预测.将以上3部分信号输入设计的MPC控制器中进行控制.
4 验证及结果分析
本文由高速工况和低速工况数据构建综合工况,用以验证提出M–HSMPC的有效性,该综合工况如图7所示.首先通过分析不同控制策略下的发动机输出转矩和发动机工作点验证M–HSMPC在燃油消耗和排放的有效性,对M–HSMPC在多目标方面的性能进行对比分析.
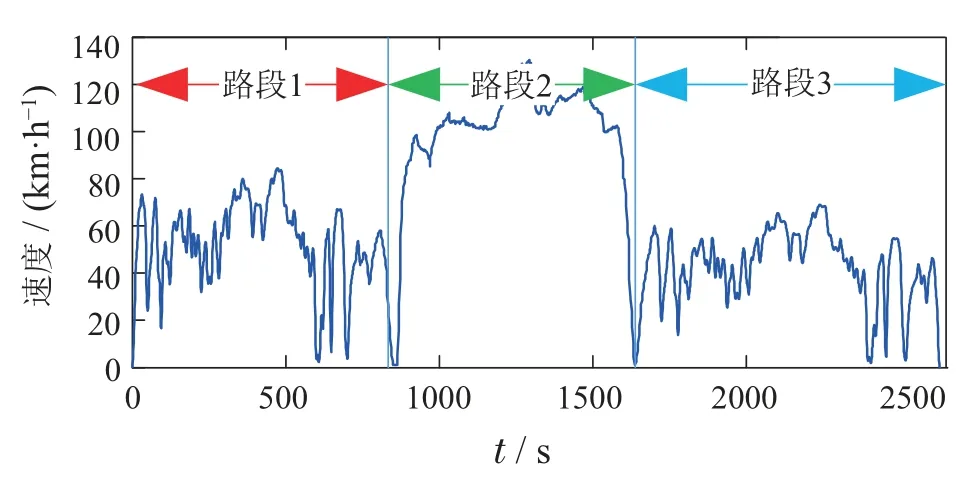
图7 汽车行驶综合工况图Fig.7 Comprehensive working condition map
4.1 M–HSMPC性能验证
在综合工况下使用DP,MPC和HMPC等策略作为参照,与所制定M–HSMPC策略进行对比,以验证其在燃油消耗和排放方面的有效性.当电池SOC下降到0.3前,不同策略控制下的SOC变化曲线对比如图8,PHEV发动机工作点分布情况对比和发动机输出转矩分布对比分别如图9和图10所示.
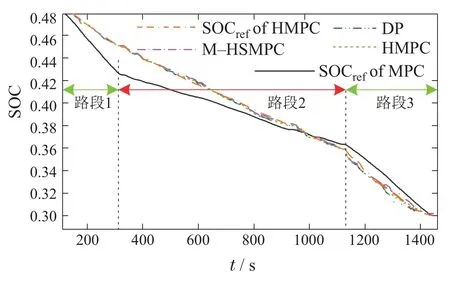
图8 不同策略的SOC对比图Fig.8 SOC trajectory of different strategies

图9 不同控制策略下发动机输出转矩分布图Fig.9 Engine output torque in different strategies
由图8可以看出,M–HSMPC和HMPC策略下基于V2I参考SOC和DP下的SOC轨迹基本重合,且均较好地跟随由上层规划给出的参考SOC.另一方面,MPC参考SOC则与DP参考SOC轨迹偏离较远.
由图9中MPC发动机转矩输出图,结合图8MPC下SOC轨迹可知,由于MPC参考轨迹并非最优,这使得其在第1段路程消耗较多电量,而在第2段路程消耗较少电量,具体表现为图9中③虚线框中MPC策略下发动机输出转矩要多于其他3种策略.此外,从图中①虚线框可得出,M–HSMPC和M–HMPC在速度波动较小的情况下,二者发动机转矩均与动态规划发动机转矩基本一致.但在速度波动比较大的情况,由于M–HMPC缺少车速预测,因此会有更多发动机转矩输出,如图9中②虚线框所示.由此可知,M–HSMPC通过车速预测和基于V2I对SOC规划,更合理输出发动机转矩以提升燃油经济性.
由图10可知,M–HSMPC和HMPC在发动机转速处于低速时(ωeng<400),发动机基本工作于发动机最优曲线附近,而HMPC的发动工作点更多的分布在燃油经济较差的低转速区间,这是因为HMPC没有合理的规划SOC导致其在低速路段电量过低而输出过多的发动机转矩.M–HSMPC在发动机高效区间的工作点要多于其他控制策略,这是因为M–HSMPC通过合理的规划SOC,在高速工况下发动机效率较高时,输出较多的发动机转矩,提升了整个行程的燃油经济性.
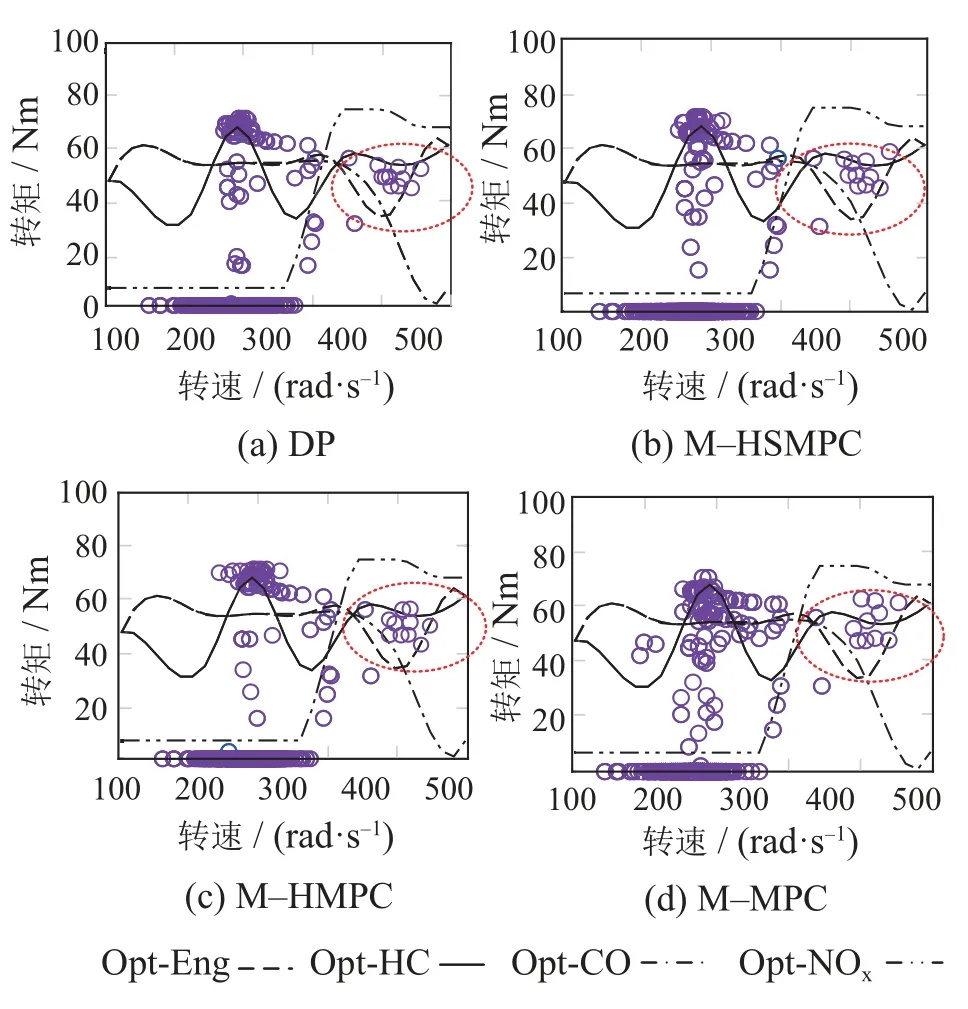
图10 不同控制策略下发动机工作点分布对比图Fig.10 Engine working region in different strategies
由表2所示,以低速+高速+低速的结果为例.相比MPC和HMPC两种策略,M–HSMPC的燃油消耗和污染物排放最接近DP的控制效果,其燃油消耗、CO排放、HC排放、NOx排放与DP策略比较相差2.5%,1.2%,2.6%,6.8%;HMPC由于缺少对未来需求车速的预测,导致其部分的燃油消耗和污染物排放增加,与DP策略相比较,HMPC的燃油消耗、CO排放量、HC排放量和NOx排放量分别增加3.6%,7.1%,7.8%和9.5%;MPC由于参考SOC是通过由经验给出,其与DP的结果差距最大,MPC的燃油消耗、CO排放、HC排放、NOx排放分别增加了21%,20%,14%,11%.

表2 低速+高速+低速,SOC0=0.5,总里程=32.42 km条件下燃油消耗和排放结果对比Table 2 Low speed+High speed+low speed,SOC0=0.5,comparison of fuel consumption and emissions under total mileage=32.42 km
4.2 多目标权值的设定分析
为验证M–HSMPC在多目标方面的性能,在综合工况下,使用M–HSMPC方法设置两组权值进行验证.其中一组权值仅考虑燃油消耗,即Ω2=1,其余权重为0,称为S组.而另一组则是在低速时仅考虑油耗,高速时综合考虑NOx,CO和油耗,即在低速时Ω2=1,其余权值为0,而高速时的权重Ω2=Ω3=Ω5=1,
其中:ωm,ωm_min,ωm_max分别为电机转速与转速上下限;ωe,ωe_min,ωe_max分别为发动机转速与其上下限;Tm,Tm_min,Tm_max分别为电机转矩与其上下限;Te,Te_min,Te_max分别为发动机转矩与其上下限.其中电机与发动机的约束范围受其转速影响,采用插值法计算如下:
图11为综合工况下每个路段的仿真结果.S组与M组的SOC都是随着里程逐渐减少,而S组则在高速段耗电较少.结合各段的发动机工作点进行分析,在路段1的低速段两组仿真结果的发动机工作点均落于发动机最优工作线附近,而由于M组消耗较多的电量,使得发动机的输出转矩较少,这导致在油耗上M组均要优于S组.在路段2的高速段,S组由于仅考虑燃油消耗,其工作点处于燃油消耗最优曲线上,而M组除了燃油消耗还权衡了排放,因此M组发动机工作点处于最优工作线的下方区域.除此,S组在第2段由于电能使用较少的原因而输出更多的发动机转矩,因此第2段M组在油耗和排放都要优于S组.路段3的过程与路段1类似,这里不再做分析.
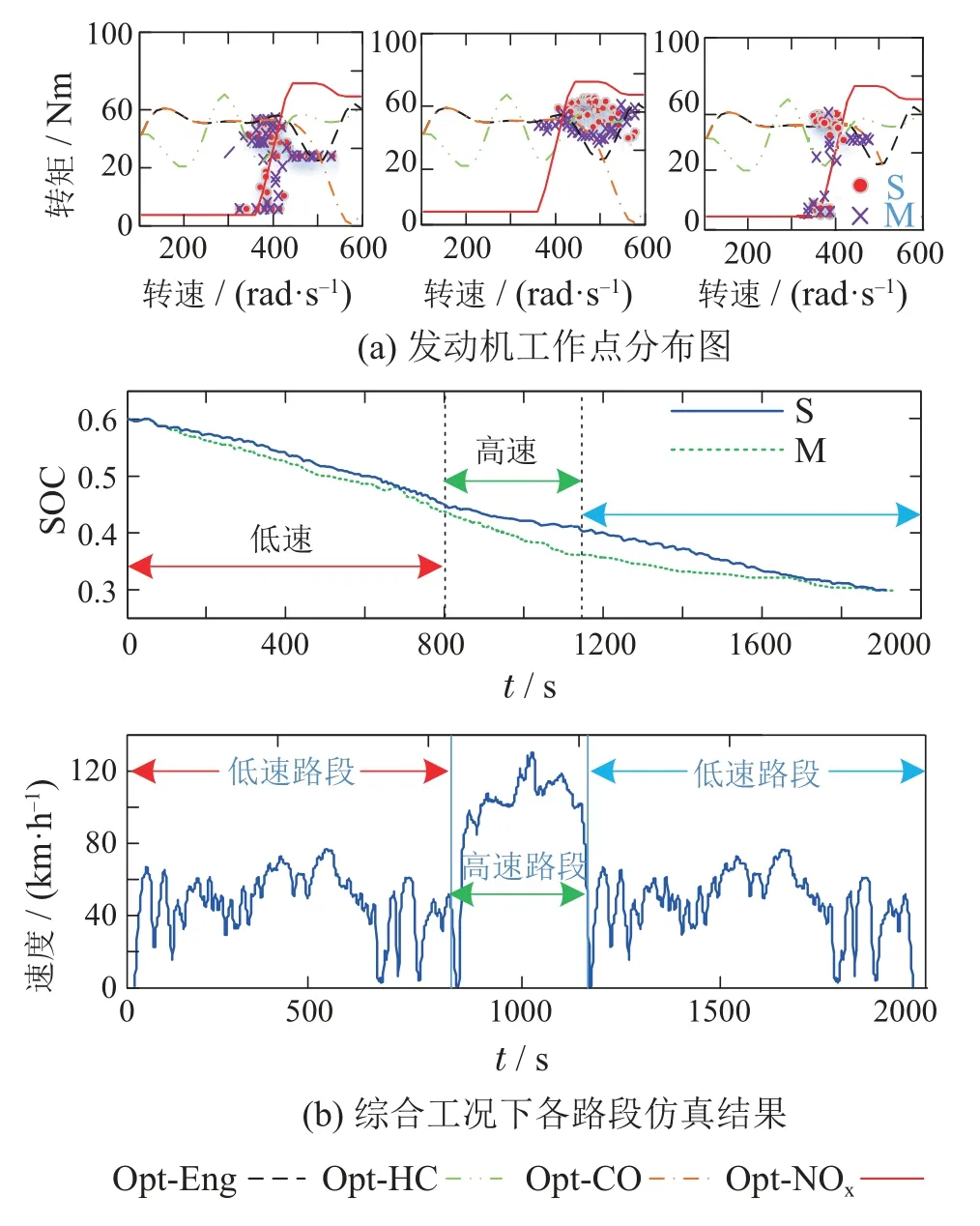
图11 M组和S组的仿真结果图Fig.11 Simulation results of M group and S group
最终油耗对比结果如表4所示,由表4的整个工况的结果来看,M组燃油消耗相比S组增加3.5%,CO排放增加2.8%.在HC和NOx排放上M组相比S组分别减少了5.3%和7%.约束取值如表3所示.
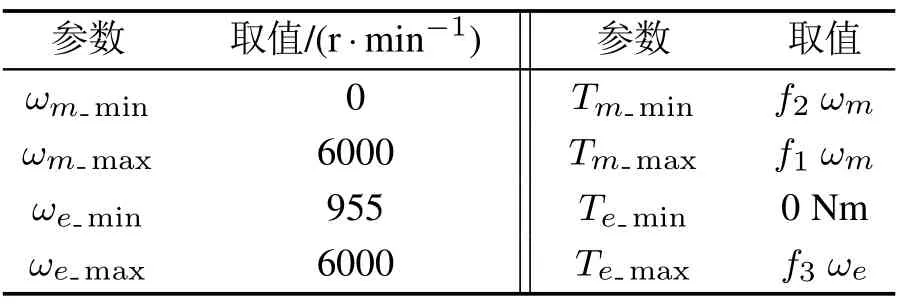
表3 仿真约束取值Table 3 The constraint values of simulation model
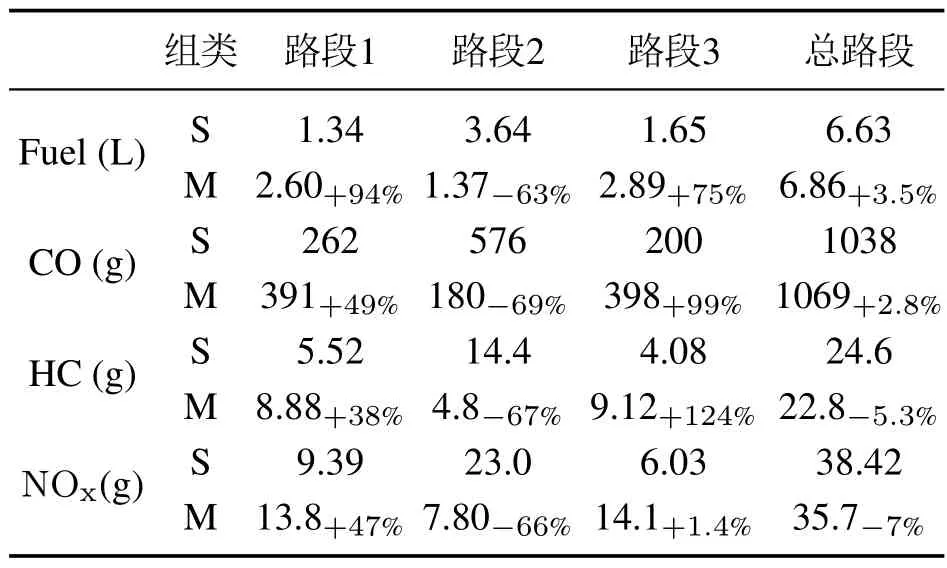
表4 S组和M组仿真结果燃油消耗和排放数据Table 4 Fuel and emission comparison between________Group M and Group S
5 结论
1) 以改善插电式混合动力汽车燃油消耗和排放为目标,将基于马尔科夫模型速度预测和基于V2I动态规划优化参考SOC与MPC相结合,构建了多目标分层随机模型预测控制策略;
2) 验证结果表明,相比MPC和HMPC两种策略,M–HSMPC的燃油消耗和排放最接近DP的控制效果,可获得多目标的性能改进;
3) 通过不同行行驶工况设置不同权重值进行M–HSMPC的性能验证,结果表明不同行驶工况下的权重值设置可获得不同的控制目标,说明所制定的M–HSMPC能有效的提升PHEV能量管理的性能,且可为进一步研究多工况适应性和多目标权衡提供研究方向.
猜你喜欢
昆钢科技(2022年4期)2022-12-30
昆钢科技(2022年1期)2022-04-19
小哥白尼(野生动物)(2021年3期)2021-07-21
昆钢科技(2021年6期)2021-03-09
小学科学(学生版)(2019年4期)2019-05-11
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年5期)2015-02-28