
Biomechanical analysis of the“running”vs.“conventional”diagonal stride uphill techniques as performed by elite cross-country skiers
2022-03-24 02:36BrbrPellegriniChirZoppirolliFedericoStellLorenzoBortolnHnsChristerHolmbergFedericoSchen
Brbr Pellegrini*,Chir ZoppirolliFederico Stell,Lorenzo BortolnHns-Christer Holmberg,Federico Schen
a CeRiSM(Research Centre of Mountain Sport and Health),University of Verona,Rovereto 38068,Italy
b Department of Neuroscience,Biomedicine and Movement,University of Verona,Verona 37129,Italy
c Swedish Winter Sports Research Centre,Department of Health Sciences,Mid Sweden University, €Ostersund 83125,Sweden
d School of Kinesiology,University of British Columbia,Vancouver BC V6T 1Z1,Canada
e Biomechanics Laboratory,Beijing Sport University,Beijing 100084,China
Abstract
Keywords: Classical skiing;Kinetics;Roller skiing
1. Introduction
The Olympic winter sport of cross-country skiing has seen considerable developments in technique at the same time that improvements in equipment and track preparation have elevated skiing speed substantially.1Today’s cross-country skier must master a wide range of speeds,terrains,race distances,and racing formats.The new sprint and distance races,in which skiers compete head-to-head, demand more technical execution, including more rapid development of propulsive force and higher peak forces.2,3Moreover,the trend toward skiing with little or no grip wax during classical races in order to optimize glide has resulted in modifications of certain traditional classical subtechniques.4
With the “conventional” diagonal stride (DSCONV) technique, utilized on moderate and steep uphill slopes,5the propulsive force is exerted alternately by 2 skis and 2 poles,with the arms and legs moving in a coordinated alternating pattern.During each cycle,there is a substantial gliding phase after the contact of each ski/roller ski with the ground on either roller skis6-8 or snow.5,9-12 This is followed by a propulsive action by the leg that can be described as a backward kick entailing a stop of the motion of the ski(ski-stop phase),which requires a certain amount of static friction between the snow and the skis.13The herringbone technique, utilized primarily on very steep uphill terrain, involves alternating arm and leg movements with the skis edged at a v-angle and no gliding.14In addition to these conventional classical techniques,many modifications have been developed for use under different conditions, including “hill running”, which has already been described in a cross-country skiing manual.15Hill running differs from the DSCONVtechnique in that it involves no bending of the knee during foot contact and no free gliding because at least one of the poles is always in contact with the snow.Years later, St€oggl and M€uller16reported that during the final and steeper part of a maximal anaerobic roller skiing test using the diagonal stride technique, their participants began to partially“run or jump”,no longer demonstrating a rolling phase.
The requirement for the greater speed associated with sprint skiing and other head-to-head competitions has contributed to the further development of a new, modified diagonal stride technique, which involves significantly less gliding and may be characterized as including an aerial phase resembling running and, further, called “running” diagonal stride (DSRUN),although different from that described in earlier manuals for skiing technique.15This particular variant of diagonal skiing is utilized uphill, both to maintain high speed and to accelerate.Moreover,it may allow the force exerted on the skis to be elevated and/or timed differently, thus ensuring sufficient grip if the skier chooses stiffer skis or less grip wax,as well as when the layer of grip wax has been reduced in thickness due, e.g.,to wear and/or changing weather and snow conditions.
Recently, this variant has received more attention because of its use by the Norwegian athlete Johannes Klaebo, one of the best male sprint skiers. He has developed a distinct running-stride technique, called the “Klaebo-step” by some, the unique characteristics of which are high positioning of the knee and ski during leg recovery.1Although this new technique pattern,as performed by this particular skier,appears to be singularly effective, certain biomechanical and physiological characteristics of DSRUNas performed by other skiers have yet to be compared in any detail with those of DSCONV.
Therefore,the present investigation was designed to compare the biomechanics of these 2 variants of the diagonal stride technique during uphill skiing by elite skiers at comparable and high skiing speeds.Our hypothesis was that the running diagonal technique:(1)allows more rapid propulsion;and(2)involves greater force perpendicular to the skis,which may influence grip.
2. Methods
2.1. Subjects
At the time of their participation in this study, the 10 elite Italian male junior cross-country skiers recruited were competing internationally,training for an average of 20 h/week.This training included 8 h of roller skiing, and all were highly skilled and familiar with roller skiing on a treadmill. These skiers were 18.8§ 1.9 years old and 1.80§ 0.06 m tall; they weighed 71.7 § 4.8 kg and had a maximal oxygen consumption while performing diagonal stride on the treadmill of 69.4§3.6 mL/min/kg and 105.3§40.0 F-ed-eration Internationale de Ski(International Ski Federation)points(mean§SD).They were informed about the nature of this study before giving their written consent to participate, and the protocol was preapproved by the Ethical Committee of Verona University.
2.2. Overall design
Measurements were performed while the subjects roller-skied on a motorized treadmill with a belt surface 2.5 m wide£3.5 m long (RL3500E; Rodby, V€ange, Sweden). All subjects used the same model of roller skis (Nord; Ski Skett, Sandrigo, Italy) that had a coefficient of friction of 0.024.Pole length was adjustable in multiples of 2.5 cm, and each subject selected his own preferred length. After a standardized warm-up (10 min at 60% of maximal oxygen consumption while performing DSCONV), each subject performed a 2-min trial starting on a 10˚incline with the speed being increased rapidly to 10 km/h, at which point this speed was maintained for an additional minute,with data collection during the final 30 s(when the pattern of movement had stabilized). The trials with the DSCONVand the DSRUNwere conducted in random order for each subject. The incline and speed were set at the values reached(or values somewhat higher)in the last stage sustained during the routine incremental test with DSCONV, because some skiers switched from the traditional to the running variant at about that stage.The biomechanics of the 2 techniques were thus compared under conditions in which they appear to be preferred equally and could be performed by the skiers on the treadmill.On average,the mechanical power output under these conditions was equivalent to 110% § 9% of the power attained at the end of the incremental maximal test to exhaustion performed by these same skiers employing DSCONV.
2.3. Experimental measurements
Kinematic data were acquired at 100 Hz utilizing an optoelectronic motion-capture system (6 cameras, MCU240,ProReflex; Qualisys AB, Gothenburg, Sweden). For this purpose, 14 reflective hemispheric markers were positioned on each subject,7 at key anatomical positions on both sides of the body: the glenohumeral joint, lateral condyle of the humerus,dorsum of the wrist, great trochanter, lateral condyle of the femur, lateral malleolus, and fifth metatarsophalangeal joint.Two additional markers on each pole allowed the time points of pole contact and take-off to be monitored and pole inclination to be determined. The position of the center of mass was estimated by the Dempster anthropometric procedure.17
Pole force was measured by a lightweight single-axial load cell (Deltatech, Sogliano al Rubicone, Italy) mounted inside the standard poles (Diamond Storm 10 Max; OneWay OY,Vantaa, Finland). Analogue signals from the force transducer were sampled at 200 Hz by a data acquisition board(NI DAQPAD-6016, 16 bit; National Instruments, Austin, TX, USA).These force transducers were calibrated dynamically prior to each test,as described previously.18
Plantar pressure was monitored at 100 Hz using 2 pressure distribution insoles, each with 99 capacitive sensors (Novel,Munich, Germany). The force exerted through the roller skis was derived from the pressure and area of each sensor.Prior to testing, the insoles were calibrated in accordance with the manufacturer’s instructions.
To ensure synchronization of pole force, plantar force and kinematic data,the collection of all of these data was triggered by a digital signal.
2.4. Data analysis
In the case of techniques, pole contact and pole take-off were defined as the first point at which poling force was above and below 10 N,respectively.The duration of a skiing cycle—cycle time (CT)—was taken to be the period that elapsed between 2 subsequent pole contacts. The duration of poling action—poling time (PT)—was the period that elapsed between pole contact with the ground and pole take-off.7
The leg can produce propulsion only when the ski is stationary with respect to the ground,5so the period during which the roller ski was not moving on the treadmill—ski-stop phase time(SkiST)—was determined.7,19Specifically, the velocity of a marker placed 2 cm in front of the ski binding with respect to the treadmill belt (vski) was calculated, and SkiST was defined as periods during which vskiremained below 0.5 km/h.Rolling time (RT), which corresponds to gliding time on snow, was defined as the time that elapsed between the instant when the roller ski is first loaded(i.e.,the first point at which the plantar force was greater than 100 N)and the start of a ski-stop phase.7Swing time(ST)was calculated as follows in Eq.(1):

All durations were expressed in both absolute terms and as a percentage of CT.Cycle length(CL),the distance traveled during 1 cycle of skiing, was calculated by multiplying the treadmill velocity by CT. The distances traveled by the roller skis in the forward direction during the rolling and swing phases,i.e.,rolling length(RL)and swing length(SL),respectively,were calculated by integrating vskiduring these phases and were expressed both as absolute values and as a percentage of CL(rRL and rSL).
The inclination of the pole with respect to the horizontal plane (perpendicular to the gravity direction) at the time of pole plant(Inc_pon)and end of pole ground contact(Inc_poff)was calculated.The propulsive component of the poling force was obtained by calculating the component of the total poling force tangential to the inclination of the treadmill. For each cycle, the peak poling force (PFpeak), average poling force(PFavg),and average propulsive component of the poling force(PFavgP) were calculated over the entire cycle. The ratio between the propulsive component and the total poling force,which reflects the force effectiveness, was also calculated.20The integral and average forces exerted through the roller skis were calculated during the ski-stop phase(SkiFintand SkiFavg,respectively). The ski force at the beginning of the ski-stop phase (SkiF_stp) was calculated as well. The peak poling and peak ski force (PFpeakand SkiFpeak, respectively) and times required to attain these peak forces(TTPFpeakand TTSkiFpeak,respectively) were calculated. In addition, the time delay between the occurrence of SkiFpeak and PFpeak on the contralateral side was calculated.
The angular values for the hip,knee,and ankle in the sagittal plane were determined, including these values at the instants of ski-ground contact,ski stop,and ski lift-off,as well as the minimal value reached during the ski-stop phase.
The mechanical work performed against friction was estimated from the rolling distance and force exerted perpendicular to the roller skis. The mechanical work performed to lift the body against gravity was determined from the gain in elevation (see Pellegrini and colleagues7for further details).These values for mechanical work are expressed per meter traveled and unit of body mass(J/m/kg).
2.5. Statistical analyses
The data are presented as means § SD for all subjects with each technique and were checked for normal distribution using the Shapiro-Wilk test.To compare differences between the 2 conditions,the Student t test was used when normality of distribution was confirmed for both;otherwise,the Wilcoxon signed-rank test was applied.The difference between the 2 conditions was evaluated in terms of the Cohen effect size (ES) and interpreted as small(ES=0.2),medium(ES=0.5),or large(ES=0.8).Statistical analyses were carried out with SPSS Software for Windows(Version 11.0;IBM Corp.,Armonk,NY,USA),and the limit for statistical significance was set at p<0.05.
3. Results
3.1. Spatiotemporal parameters
The temporal and spatial characteristics of each cycle of skiing are presented in Table 1. Stick figures illustrating the positions of body segments at important points in the cycle and a bar diagram representing the timing of the ski and pole phases are presented in Fig. 1. Cycle time was 28% shorter with DSRUNthan with DSCONV. Absolute ski-stop and swing times did not differ,whereas the rolling(gliding)time was significantly shorter, and the relative propulsive phases of the poles and roller skis(as a percentage of CT)were both longer with DSRUN. During DSRUN, each pole made contact with the ground slightly before the roller ski on the contralateral side,whereas with DSCONV, each pole made contact with the ground 0.16 § 0.04 s following the contralateral roller ski(Fig. 2). The distance covered by rolling was shorter during DSRUN, which explains entirely the shorter CL with this subtechnique. The distance covered during the leg-swing phase was the same for both variants of DS.
As shown in Fig.1,DSRUNinvolved 2 short periods when neither skis nor poles had contact with the ground(the first,after the end of the contact of the right ski and left pole with the ground,and the second,after the end of the contact of the left ski and right pole).In contrast,DSCONVinvolved no such phase.
3.2. Kinetics and the timing of force application by the poles and roller skis
The total poling force averaged over the skiing cycle did not differ between the 2 variants of DS (Table 2), although the integral of pole force was 37% lower and the peak pole forcewas 13%higher with DSRUN(Table 2 and Fig.2).The propulsive component and effectiveness of pole force were both lower for DSRUNthan for DSCONVand, moreover, the poles were more inclined at the time of pole plant and less inclined at pole take-off when using the DSRUN(Table 2).The integral,average, and peak force exerted through the skis during the ski-stop phase did not differ. The ski force attained at the beginning of the ski-stop phase was 2-fold greater, and the time required to reach peak ski force was shorter with DSRUN(Table 2 and Fig.2).
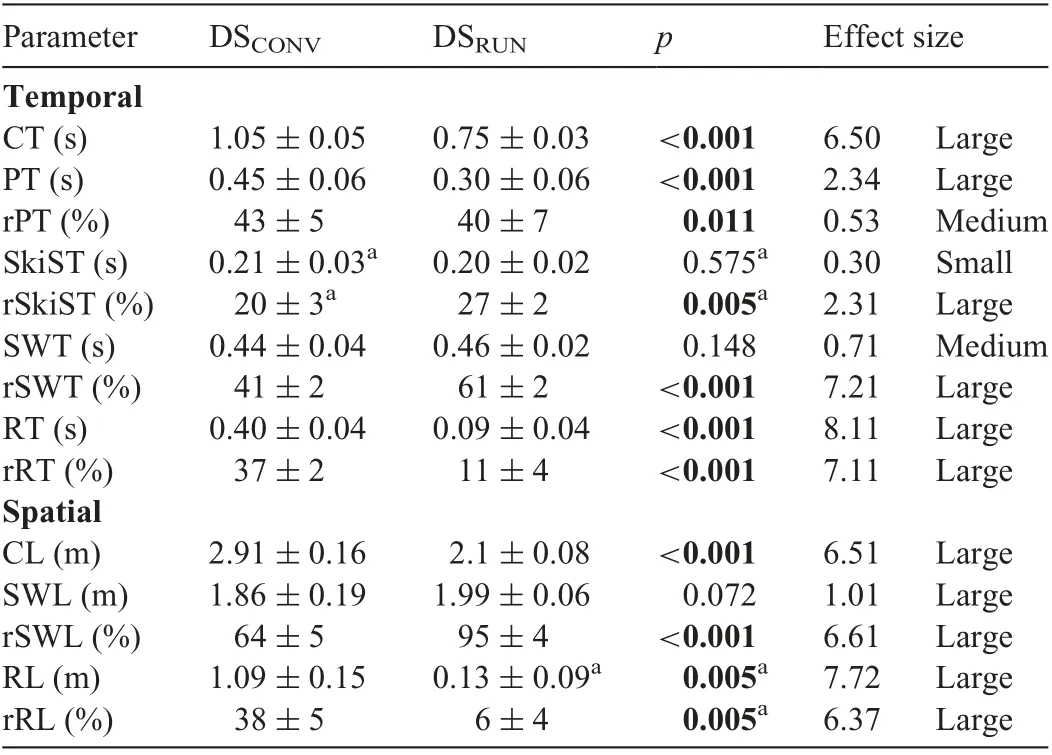
Table 1 Spatiotemporal parameters during the performance of DSCONV and DSRUN.
There was almost no time delay between PFpeakand SkiFpeakwith either variant of DS,with PFpeakoccurring slightly before SkiFpeak. PFpeakhad more pronounced intersubject variability when employing DSCONVthan when employing DSRUN(0.12§0.08 s vs.0.09§0.02 s,p=0.1169).
The mechanical work performed against friction was significantly less with DSRUNthan with DSCONV(0.04§0.01 J/m/kg vs. 0.10 § 0.02 J/m/kg, ES=3.45, p < 0.001). The minimal work required to lift the body (derived directly from the gain in body height for every meter covered) was 1.70 J/(m¢kg)for both variants of DS and for every skier moving at the same speed.
3.3. Angular joint kinematics
At the time point of the first ground contact after the leg swing (i.e., the beginning of the rolling phase), extensions of the hip,knee,and ankle joints were more pronounced(“open”and with“more extended”leg)with DSRUNthan with DSCONV(Table 3 and Fig.3).
With both techniques, maximal leg flexion was obtained sequentially:hip joint first,then knee and ankle last.In the case of the hip joint, maximal flexion occurred shortly prior to and after ski-stop for DSRUNand DSCONV(-0.023 § 0.023 s vs.0.011§0.032 s,ES=1.22,p=0.0314).With DSRUN,the knee joint was 14˚more flexed at the instant of ski-stop,reaching its minimal angle early (at approximately 16% of the ski-stop phase)(Table 3)and remaining extended thereafter until the end of this phase. With DSCONV, the knee joint was initially more flexed during the ski-stop phase until the minimal angle was reached (approximately 38% of the way through this phase),after which the knee was again extended until the end of this phase (Fig. 2 and Table 3). Maximal knee flexion during the ski-stop phase was smaller during DSRUN(Table 3)than during DSCONVand was attained earlier(0.043 § 0.024 s vs.0.078§0.026 s,after the instant of ski-stop,ES=1.42,p=0.0033).The subsequent knee extension was maintained during more of the ski-stop phase in DSRUNthan in DSCONV(76%§12%vs.64%§11%,ES=1.09,p=0.0107),and the angular range of motion(RoM)was approximately 2-fold greater(28˚§4˚vs.16˚§3˚,ES=3.36, p=0.00014) (Fig. 3). SkiFpeakoccurred approximately 0.02 s after the minimal knee angle,with no differences between the 2 techniques.In addition,flexion of the ankle joint was similar(Table 3),occurring approximately halfway through the ski-stop phase in both subtechniques.
From approximately 10% to 80% of the way through the swing phase, the hip and knee joints were more flexed during DSRUNthan during DSCONV, with the minimal angle of the knee at the midpoint of this phase being 94˚§ 7˚during DSRUN,i.e.,approximately 40˚less than during DSCONVat the corresponding time point and significantly less (p < 0.001)than the minimal angle during DSCONV,which occured at the end of the gliding phase(Table 3).
4. Discussion
The present investigation was designed to characterize differences in the biomechanics of the novel “running” diagonal(DSRUN) and the conventional diagonal stride technique involving gliding(DSCONV).The major differences associated with DSRUNwere as follows:(1)a distinctly more rapid cycle rate,due entirely to substantial shortening of the rolling phase;(2) deeper knee flexion, followed by earlier extension of the hip and knee joints during the ski-stop phase; (3) more pronounced knee extension RoM during the ski-stop phase; (4) a 2-fold greater force exerted perpendicularly to the roller skis(when they had stopped rolling forward), with peak force being attained earlier; (5) more pronounced and characteristic knee flexion during most of the forward leg swing,with minimal knee flexion occurring midway through this phase; (6)more pronounced hip flexion during the first two-thirds of the swing phase;and(7)a slightly greater peak pole force,with a smaller propulsive component and less effectiveness.
4.1. Cycle characteristics
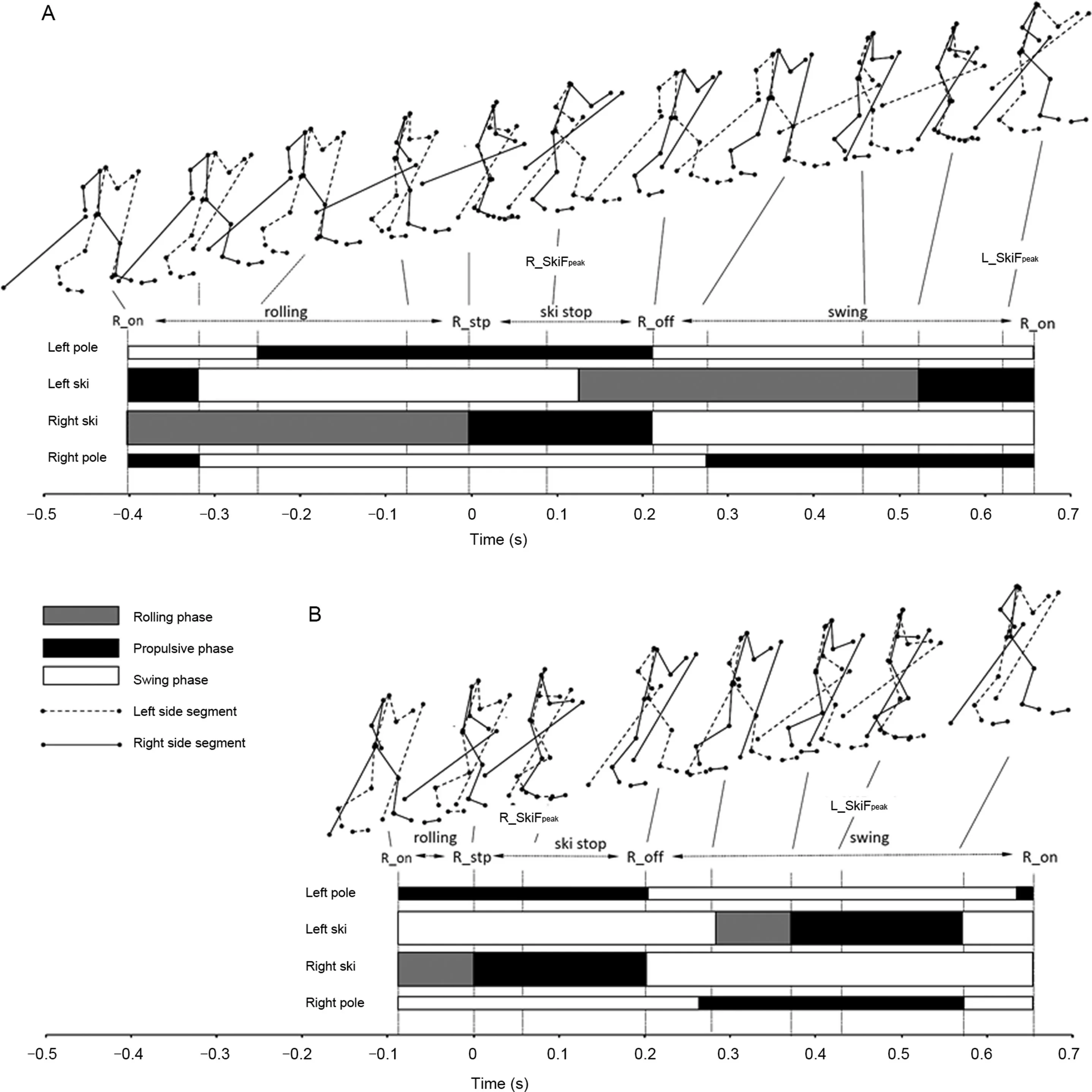
Fig.1. Stick figures illustrating the positions of body segments at key points in the cycle and bar diagrams representing the timing of the ski and pole phases when performing DSCONV(A)and DSRUN(B).DSCONV=conventional diagonal stride;DSRUN=running diagonal stride;L_SkiFpeak and R_SkiFpeak=peak ski force for left and right force,respectively;R_on=instant of first load of the right ski with the ground;R_stp=instant of right ski-stop;R_off=instant of right ski lift-off.
The durations of the various phases of DSCONVskiing observed here are similar to those reported for elite skiers employing the diagonal skiing technique while roller skiing on a treadmill at a 9˚ incline at 11 km/h6and are closely similar to those found when employing the diagonal skiing technique on snow, on less steep slopes,and at moderate speed(7.5˚,3.5 m/s).12
The most characteristic feature of DSRUNis its more rapid cycle rate (i.e., shorter cycle length), which is due entirely to the substantially shorter rolling (gliding) phase, with no difference in the absolute duration of roller ski-stop and leg swing forward. This increase in cycle rate has been proposed to be employed by elite skiers utilizing a variety of various subtechniques at higher speed, when cycle length reaches a plateau (or even becomes shorter) and/or more speed is desired.2,12,16Moreover, the elevation from submaximal to maximal speed involves an increase in relative leg-thrust times16and reductions in glide and swing leg times,with unaltered absolute push-off times.2,12Specifically during sprint skiing, it has been observed that cycle rate appeared to be an important parameter in velocity production, contrary to other distance races where speed was correlated with cycle length.21DSRUNexhibits all of these features (i.e., more rapid cycle rate, unaltered push-off time, and reduced rolling (gliding)time), potentially explaining why this variant is employed by skiers both to reach and to maintain higher speeds.
4.2. The rolling(gliding)phase
Although the duration of the rolling phase during DSRUNis quite short (0.09 s), this phase may nonetheless have a functional role to play. The duration of the ski-stop phase during DSRUNis much shorter than foot contact during running on a similar slope and at the same speed; the total duration of rolling plus ski stop during DSRUNis very similar to the duration of ground contact while running.22The rolling phase during DSRUNcorresponds to the knee flexion at the beginning of ground contact when running. In other words, cross-country skiers flex their knees at the beginning of ski contact while still rolling(gliding),allowing the ski-stop phase to be shorter than foot contact when running,thereby allowing skiers to lose less speed than runners.
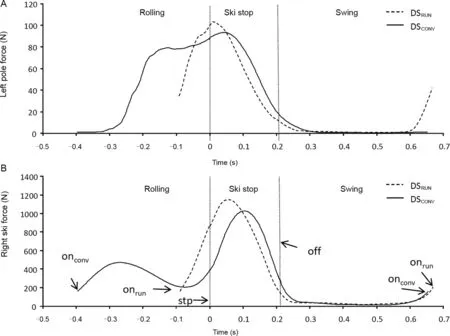
Fig.2. The time course of force exertion through the left pole(A)and right roller(B)ski while performing DSRUN and DSCONV.These curves were obtained by normalization to the average cycle time for each variant and averaging the data on all subjects,setting the instant of ski-stop to 0 s for both DSRUN and DSCONV.The instant at which the roller ski is first loaded, the instant when the ski stops rolling forward, and the instant when the roller ski is unloaded are indicated as“on”,“stp”,and“off”,respectively.DSCONV=conventional diagonal stride;DSRUN=running diagonal stride;onconv and onrun=instant of first load of the roller ski with the ground in DSCONV and DSRUN,respectively.
Resistive forces exert considerable impact on the total mechanical work required to ski, and thereby their decrease may allow skiers to expend less metabolic energy.1,23Mathematical simulation indicates that even small reductions in friction can improve race time considerably.24The shorter distance covered by rolling (gliding) with DSRUNresults in work against friction that is approximately one-third of that when using DSCONV. Previously, we estimated that the work against friction while DS roller skiing on a treadmill at an incline of 2˚accounts for 17% of the total external work.7Here,on a considerably steeper incline(10˚),the work against friction(the work required to lift the body against gravity)was estimated to be 6% and 2% for DSCONVand DSRUN, respectively. The work against friction was estimated to be 6% and 2%of the work required to lift the body against gravity in the case of DSCONVand DSRUN,respectively
The work against friction, although significantly different under these 2 conditions, does not appear to be relevant with respect to the mechanical work required to climb a hill.
During skiing on snow and depending on the preparation of the skis and environmental conditions,the gliding friction coefficient can vary from values slightly lower to 5-fold larger than those involved in roller skiing,which was used in our investigation.25Friction higher than that encountered in the current investigation could reduce gliding distance when skiing on snow and,at the same time,increase the work per meter required to overcome friction while gliding, resulting in a final balance with respect to work against friction that is not easy to establish.
The rolling/gliding phase, which allows cycles to be long,certainly contributes to the relatively low metabolic cost of skiing compared to walking or running at the same speed, but it can also be detrimental when the goal is higher speed.Indeed,in addition to requiring work against friction,rolling or gliding leads to a loss of the time that can be utilized for propulsion.This is in agreement with Hoffman and collegues,26who observed that a high cycle rate minimizes the decrease of velocity within a cycle while reducing the duration of the gliding and recovery phases,which are nonpropulsive phases.
4.3. Leg propulsion
In previous investigations, the beginning of the leg-thrust phase during DS,sometimes referred to as the kick or push-off phase,has usually been defined as the time point at which the2 feet are side by side5,10,16or when the roller skis stop moving.7,12,19,27After measuring both the motion of the roller skis and the propulsive force, Bellizzi and colleagues19observed that the duration of propulsion was 28%-29%shorter than the ski-stop, indicating that the leg thrust starts after the skis have stopped.On the basis of these observations and the assumption that leg thrust and extension occur simultaneously,we analyzed the ski-stop phase here while taking into account the occurrence of leg-joint extension.
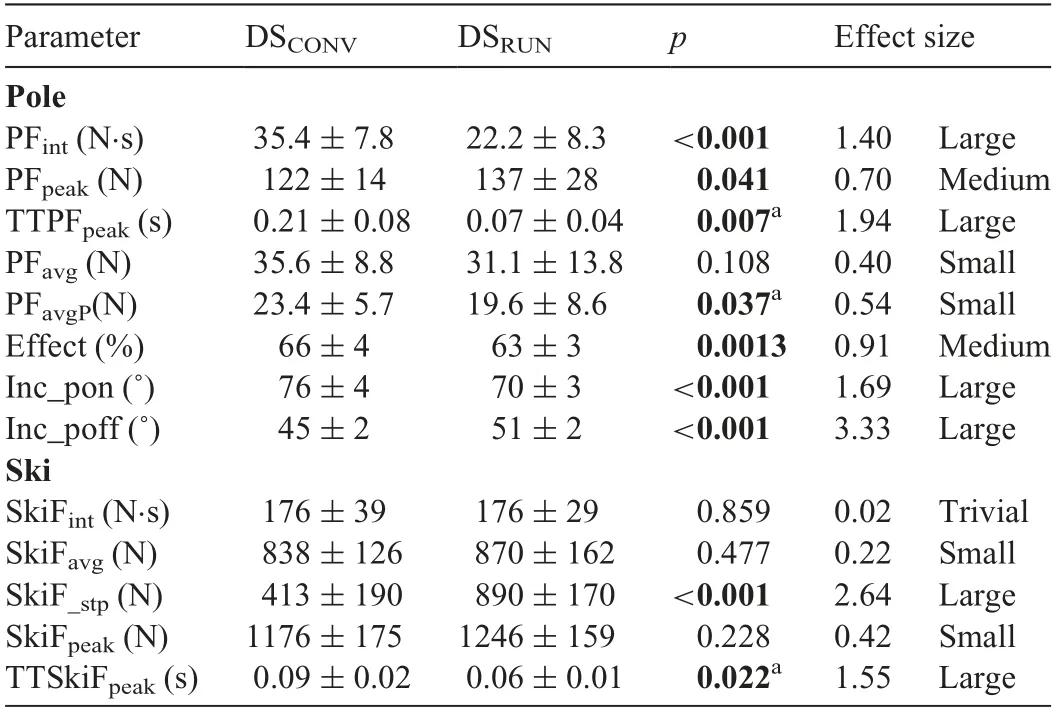
Table 2 Kinetic parameters during performance of DSCONV and DSRUN.
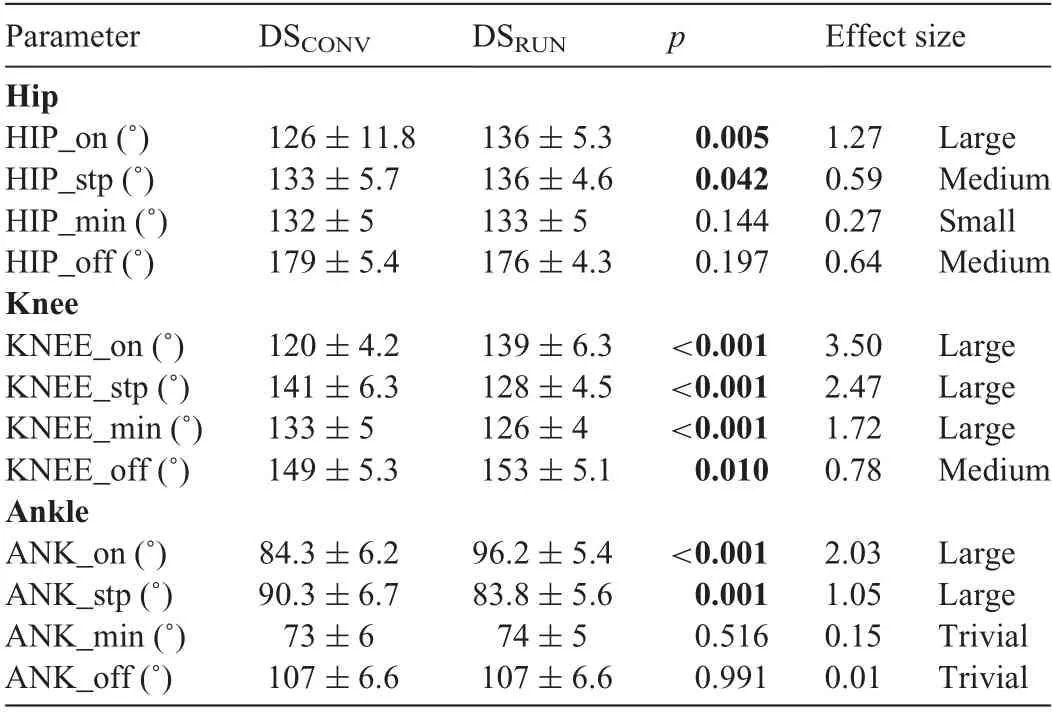
Table 3 Angular kinematics during performance of DSCONV and DSRUN.
The ski-stop phase was of equal duration during DSRUNand DSCONV, but the pattern of joint movement during this phase differed. Extension of the hip began slightly prior to the skistop phase in the case of DSRUNand around the beginning of this same phase with DSCONV.Moreover,when employing the DSRUN, the skiers demonstrated more pronounced (deeper)knee flexion and greater and more prolonged(78%of the duration of the ski-stop phase vs. 64% for DSCONV) RoM knee extension,indicating superior propulsion by the knee extensor muscles during the concentric phase of this subtechnique.
The forces exerted through the skis were estimated here by a pressure insole system that did not provide information concerning tangential forces.Consequently,it was not possible to establish the influence of the difference in biomechanics observed on the propulsive component of force exerted through the skis.More detailed information could be provided by systems that measure 2-or 3-dimensional forces.
The stretch-shortening cycle during diagonal skiing has been demonstrated previously.9In our current investigation,extension of the knee during both DSCONVand DSRUNwas preceded by a rapid knee flexion, indicating possible involvement of stretch-shortening of the knee extensor muscle. However, our present data do not allow identification of potential differences in the effectiveness of this mechanism between the 2 variants of diagonal stride.9Further investigations,including electromyography designed to detect the occurrence of preactivation when the muscle is forced to stretch, are required in order to determine whether utilization of elastic energy stored when muscles are stretched is more effective during DSRUNthan during DSCONV.
Our present observations provide only partial support for the belief by elite skiers and their coaches that the DSRUNtechnique provides better grip on snow.Although at the beginning of the ski-stop phase, the vertical ground reaction force was twice as high with DSRUNas with DSCONV, the average and peak vertical ground reaction forces did not differ. On snow,application of force perpendicular to the ski flattens the ski camber, thereby increasing friction between the skis and snow.13Consequently, the resistance force provided by static friction (preventing the skis from sliding back during the kick phase)is highly dependent on this force and,in theory at least,DSRUNcould provide a substantial benefit in this respect.However,this was verified here only during the first part of the ski-stop phase, involving extension of the hip, and not during knee extension.Further investigation of this issue is necessary.
In the case of the DSRUN, static friction between the skis and snow(which was not investigated here)can be elevated by positioning the skis as an angled herringbone. This strategy cannot be utilized when using classical techniques, because gliding with the skis in a“V”shape is not allowed by the International Ski Federation rules.
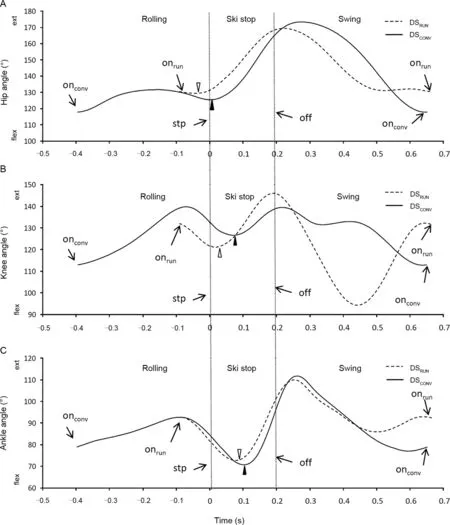
Fig.3. The time-course of changes in the hip(A),knee(B),and ankle angles(C)in the sagittal plane while performing DSCONV and DSRUN.These curves were obtained by normalization to the average cycle time for each variant and averaging the data on all subjects,setting the instant of ski-stop to 0 s for both.The instant when the roller ski is first loaded, the instant when the ski stops rolling forward, and the instant when the roller ski is unloaded are indicated as“on”, “stp”,and“off”,respectively.The minimal values reached by the joints during the ski-stop phase are indicated by filled triangles for DSCONV and empty triangles for DSRUN.DSCONV=conventional diagonal stride;DSRUN=running diagonal stride;ext=extension;flex=flexion;onconv and onrun=instant when the roller ski is unloaded in DSCON and DSRUN,respectively.
Potentially, DSRUNmight enhance grip during the ski-stop phase, thereby allowing application of less ski grip wax and thus improving gliding, which has been demonstrated to result in more rapid skiing on variable terrain.28Moreover,it has been suggested that an increase in static friction decreases both oxygen uptake and heart rate and improves performance.29
4.4. The leg-swing phase
During the leg-swing phase(i.e.,recovery of the ski),DSRUNwas associated with more pronounced hip and knee flexion, a pattern of movement particularly evident in certain individual skiers,including Johannes Klæbo.1In the present investigation,the knee showed a maximal flexion about 40˚more pronounced in DSRUNthan in DSCONV.Hip and knee flexion during the leg swing potentially reduces the distance between the rotational mass and point of rotation,thereby decreasing the leg’s moment of inertia. During walking, knee flexion lowers both the mechanical and metabolic demands,which may also be the case when running.30The trade-off between lowering mechanical demand and the increase in muscular work required to flex the leg should be examined in detail.
4.5. Propulsion by the poles
Force exerted through the pole provides much of the total propulsion during diagonal skiing.18Here, our observations concerning the kinematics and kinetics of poling during DSCONVare similar to those reported previously on a similar incline and at a similar speed,2,8,12,18as are our findings on synchronization between the arms and legs.6,12The integral of force over the poling phase was lower with DSRUNdue to less prolonged poling, but the average poling force over the entire cycle was similar with both subtechniques. The observation that with DSRUNthe skiers finished poling with their poles less inclined could be attributed to the shorter duration of pole propulsion. As a consequence, the effectiveness of pole-force application and the propulsive component of poling force were both lower for DSRUNthan for DSCONV,with poling,nonetheless,playing an important role in propulsion in both cases.The use of poles has been reported to be helpful when running uphill because it lowers the sense of effort,even though it does not save energy.31However, with their stronger upper-body muscles, skiers probably gain more advantage from using poles than do runners.
4.6. General considerations concerning DSRUN and performance
During a race,DSRUNis usually performed at high speed on a steep slope, so our experimental speed and slope required a power output approximately 10% higher than that attained at the end of the incremental diagonal stride test to exhaustion.Even if our subjects could ski for several minutes under these conditions,this high intensity did not allow them to reach a metabolic steady state. Therefore, we could not determine the energy uptake of these 2 variants of diagonal stride,and we can only speculate about the relative economy. During DSCONV,some of the distance is covered by gliding (rolling), and both the cycle rate and the rate of propulsive actions were lower than during DSRUN,so DSCONVmight provide greater economy.19,32
St€oggl and M€uller16found that despite a relative rolling duration of 40.2%at the beginning of 30 s of skiing with diagonal stride at a very high incline and speed,the skiers began to partially run or jump during the final part of this trial,demonstrating a markedly shortened or even no rolling phase.Although this behavior may have been demonstrated by only some of the skiers(the SD in the average relative rolling duration (5.9%) was high (§15.5%)), these findings suggest that DSRUNmight be preferable when skiers are fatigued. The increased relative duration of the propulsive phase when skiers are fatigued is consistent with what has been reported for uphill running33as well as for double poling.34
Although because of the shorter time involved, skiing economy is not particularly relevant in connection with this new variant, it is nonetheless important to understand physiological aspects, such as the rate of lactate accumulation and neuromuscular effort. A particularly interesting point is the degree to which skiers become fatigued while performing either DSCONVor the DSRUN. This question can be addressed by investigations designed specifically to assess neuromuscular fatigue.
Even though DSRUNmay be energetically unfavorable,this new variant could be advantageous in providing greater peak speed, which is one of the most important determinants of success in sprint skiing.3Future investigations specifically designed to determine the maximal speed attainable will clarify this.26
4.7. Limitations of the present study
Numerous previous investigations of the biomechanics of cross-country skiing have involved the use of a treadmill in the laboratory because this approach has certain obvious advantages,including the use of more advanced,high-precision kinematic measurement systems not applicable on snow,as well as the assessment of numerous consecutive cycles of movement at precise and constant speeds and inclines. However, the biomechanics on snow may differ, even more so with the diagonal stride than with skating or double poling techniques.When performing diagonal stride on roller skis with ratcheted wheels,static friction is nearly unlimited and prevents the roller skis from sliding backward during the push-off phase. On the contrary, on snow, grip during the kick is influenced by both the vertical loading of the ski and the wax employed.During steep uphill climbs in particular, the tangential forces exerted during propulsion are very close to the resistive force of ski-snow friction, so that skiers often must adjust the intensity and/or direction of force application to avoid slipping backward.
In addition,the mechanical properties of roller skis and skis used on snow differ. The differences in the height at which force is applied (4.0-5.0 cm for roller skis (the height at the top of the frame)vs.2.5-3.0 cm for skis)and the lateral width of the area of contact (3.8 cm vs. 4.4 cm) makes the moment of rotation on the longitudinal axes of roller skis higher and probably requires more effort to maintain stability.This could be even more relevant with the new technique,where the duration of single support lasts longer.
Friction on snow can be comparable to or even higher than the rolling friction involved here, so skiing on snow could be characterized by a shorter gliding phase than that observed in the present investigation. Further investigations on snow are,therefore,required to determine the validity of our current data in the field.
Here, we compared the 2 technical variants under conditions that are likely to be equally favorable to both.During races,skiers usually employ the running variants for relatively short periods of time and probably attain much higher velocities than those examined here.Consequently,the values for biomechanical parameters documented here are not entirely representative in racing scenarios. If we had compared these 2 techniques at maximal speed,we would have obtained the difference in peak speed, but then we would not have known whether the differences in biomechanical parameters were due to the techniques themselves or to the different speeds. Peak speeds must be determined in future studies,preferably on snow.
5. Conclusion
Our present findings indicate that due to its more rapid propulsion and more pronounced flexion-extension RoM of the knee joint together with prolonged leg extension, DSRUNmay produce higher acceleration and/or allow reaching higher peak speed than does DSCONV.Moreover,the higher ski load at the instant of the ski-stop with DSRUNmight, at least in theory,lower the need for grip wax.Finally,other biomechanical differences,such as more flexed hips and knees during the swing phase, which reduces the moment of inertia of the leg, may result in more economical and rapid skiing.Further investigation is required in order to determine the extent to which our biomechanical findings in elite cross-country skiers roller-skiing on a treadmill are also valid on snow.
Authors’contributions
BP conceived, planned, and carried out the experimental measurements, perfomed the calculations, analyzed the data, interpreted the results, contributed to the Discussion section, and wrote the paper; CZ conceived, planned, and carried out the experimental measurements, interpreted the results, contributed to the Discussion section, and wrote the paper; FS performed the calculations and analyzed the data, interpreted the results, and contributed to the Discussion section; LB conceived, planned, and carried out the experimental measurements, interpreted the results, and contributed to the Discussion section; HCH interpreted the results, contributed to the Discussion section, and wrote the paper; FS interpreted the results and contributed to the Discussion section. All authors have read and approved the final version of the manuscript, and agree with the order of the presentation of the authors.
Competing interests
The authors declare that they have no competing interests.
 Journal of Sport and Health Science2022年1期
Journal of Sport and Health Science2022年1期
- Journal of Sport and Health Science的其它文章
- Residual force enhancement in human skeletal muscles:A systematic review and meta-analysis
- Sex differences in injury rates in team-sport athletes:A systematic review and meta-regression analysis
- Physical exercises for preventing injuries among adult male football players:A systematic review
- Interference screws vs.suture anchors for isolated medial patellofemoral ligament femoral fixation:A systematic review
- Incidence of injuries in professional snow sports:A systematic review and meta-analysis
- “When you’re down,stay down”:A lesson for all competitive alpine skiers supported by an ACL rupture measured in vivo