
基于窄带物联网的智能输液系统设计
2022-03-21 02:25杨春杰田晓旭
西安邮电大学学报 2022年5期
杨春杰,田晓旭,梁 耀
(1.西安邮电大学 自动化学院,陕西 西安 710121;2.中国石油集团测井有限公司测井技术研究院,北京 昌平,102200)
静脉输液是一种通过静脉输入大量无菌溶液或药物的治疗疾病基础手段[1]。传统的输液模式需要患者在输液过程中,实时监控或有专人陪护,存在许多弊端。随着治疗的精细化,输液环节对输液种类、速度和混比等要求愈加严格,且输液环节中存在过敏、滚针、滴速快和透压高等各种安全隐患,若不及时处理,严重时会导致重大医疗事故[2]。
目前,输液监控技术主要包括电容式输液、探针式输液、机械式输液和光电式输液。电容式输液因要针对不同输液瓶容量规格设计对应装置,生产成本极高,不适用大批量生产。探针式输液需要探针直接接触药液,并不安全。机械式输液太过依赖物理基础,如弹簧,精度无法保证。光电式输液利用红外原理与单片机等技术,可以较好地解决输液方面安全与精度问题,但其功能较为单一,仅可供患者进行单机使用,无通讯扩展功能,医护人员无法进行全面监管,存在安全隐患。
针对当前输液系统功能单一、滴速控制精确度不高、无通讯扩展和价格高昂等问题,拟提出一种基于窄带物联网的智能输液系统。系统由输液终端、嵌入式网关和窄带物联网云平台组成。在输液终端精确控制的基础上,所有输液终端通过远距离无线通信网[3](Long Range,LoRa)进行通信架构,并利用窄带物联网(Narrow Band-Internet of Things,NB-IoT)技术实现网络的外延。同时,系统通过物联网云平台建立输液档案进行数据共享,并根据个人数据库生成相应的决策机制,为输液过程提供相应的辅助信息支持,使输液过程更加安全、智能。
1 系统硬件平台设计
1.1 系统总体结构
智能输液系统主要包括感知层、网络层和应用层。感知层为输液终端部分,包括输液仪和病理手环,主要获取输液起始时间、持续时间、速度、异常情况和体征信息等相关输液及病理信息。网络层将多个输液仪节点数据以LoRa方式汇集至智能网关,智能网关对数据处理后,将数据组包以RS232方式转发监护上位机,并经协议转换发送到NB-IoT基站,上传至物联网云平台。应用层采用华为物联网云平台作为数据的接收和信令下发的中转站,在平台上完成设备 profile 和编解码插件的设计,用来解析收到的数据和下发应用发送的命令。系统总体架构如图1所示。
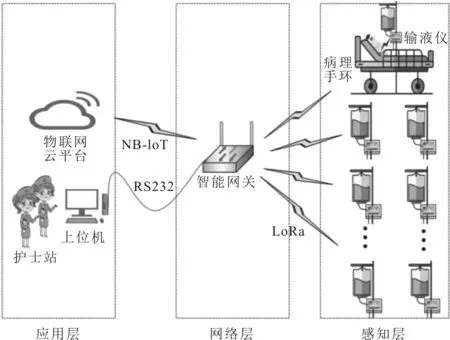
图1 系统总体架构
1.2 硬件设计
输液系统的核心部分为输液仪、病理手环和智能网关,各个部分协调工作,使输液过程安全、稳定和智能。系统硬件设计如图2所示。
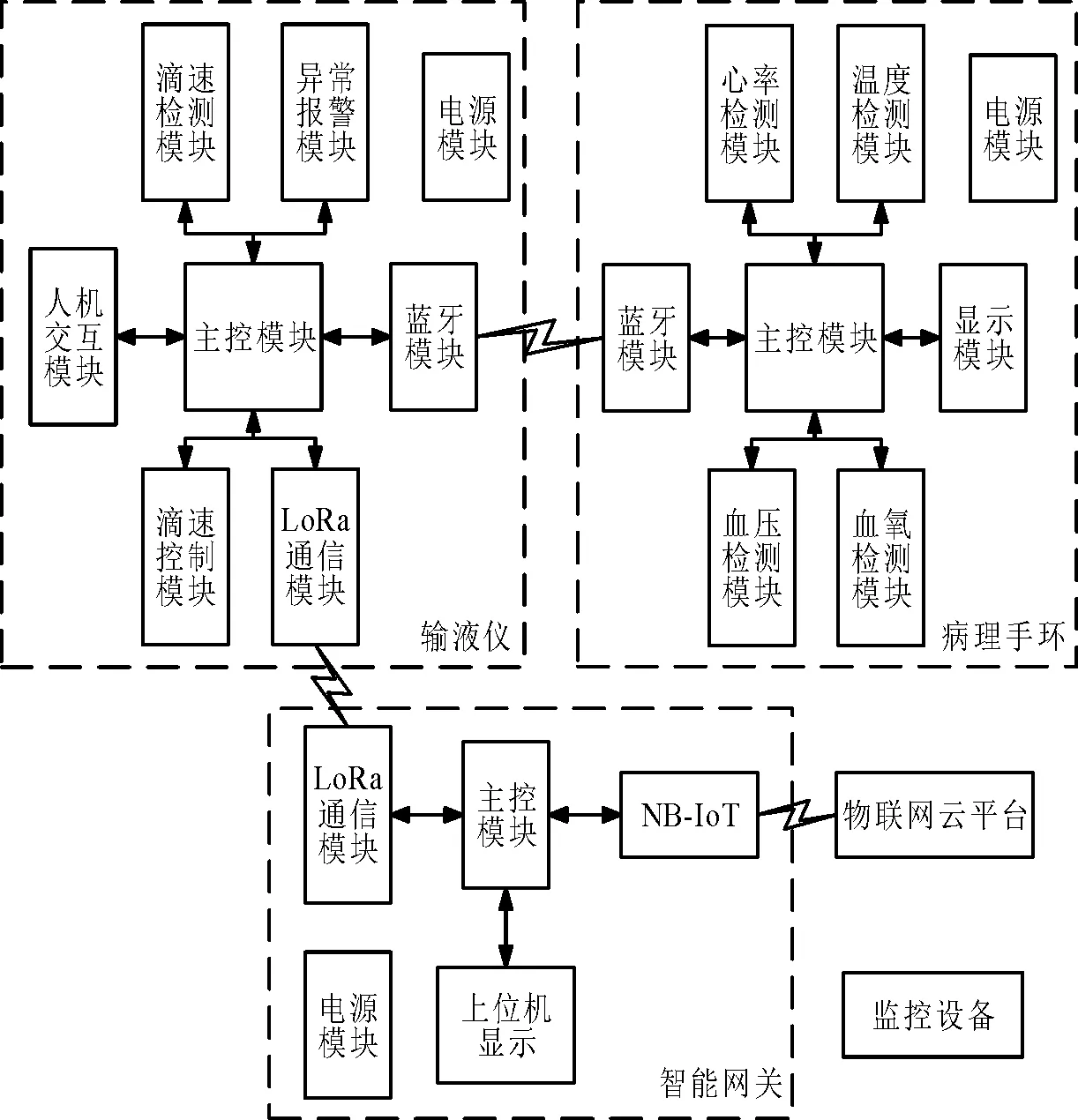
图2 系统硬件设计
1.2.1 输液仪结构及硬件设计
输液仪由主控模块、滴速检测模块、滴速控制模块、驱动电源、人机交互模块和通信模块等组成,主要完成数据采集、信息检测、数据融合、电机控制、人机交互和无线通信等功能。主控模块采用STM32型号单片机,滴速检测模块采用红外检测技术,利用直射式光电传感器,创新设计夹紧装置结构,配合滴速控制模块进行精确滴速控制,通信模块由LoRa和蓝牙模块构成。
1.2.2 病理手环硬件设计
病理手环由主控模块、体征监测模块、蓝牙通信模块和显示、电源管理模块等组成,其中体征监测模块包含温度、血氧检测模块等,主要完成各项体征参数的检测,通过蓝牙模块将数据实时发送给输液仪。
1.2.3 智能网关硬件设计
智能网关由STM32主控模块、LoRa通信模块、NB-IoT通信模块和电源管理模块构成,搜寻和连接多个LoRa节点,将接收到的由输液仪LoRa节点发送的输液信息进行数据处理、协议转换和重组打包,汇总后实时报送上位机[4],同时将其通过NB-IoT上传至物联网云平台[5]。
2 系统软件设计
2.1 输液仪软件设计
系统主控芯片采用STM32F105VC,主要分为主控程序与BootLoader程序,其开始地址分别为0x08003000和0x08000000。输液的所有功能设计由主程序完成,BootLoader程序则完成程序的引导与升级。当主控程序完成功能优化改进后,其对应的bin文件将通过BootLoader重新加载烧写到对应地址中。主控程序包含初始化模块、异常报警模块、滴速监测模块和通讯模块。为了保证输液过程可靠性,根据程序异常标志量进行针对性的操作,如当药液余量超限时,将根据余量减少程度进行梯度报警,触发信息远程推送,当到达极限时,将激活本地声光报警,并切断输液回路。输液主控程序流程如图3所示。
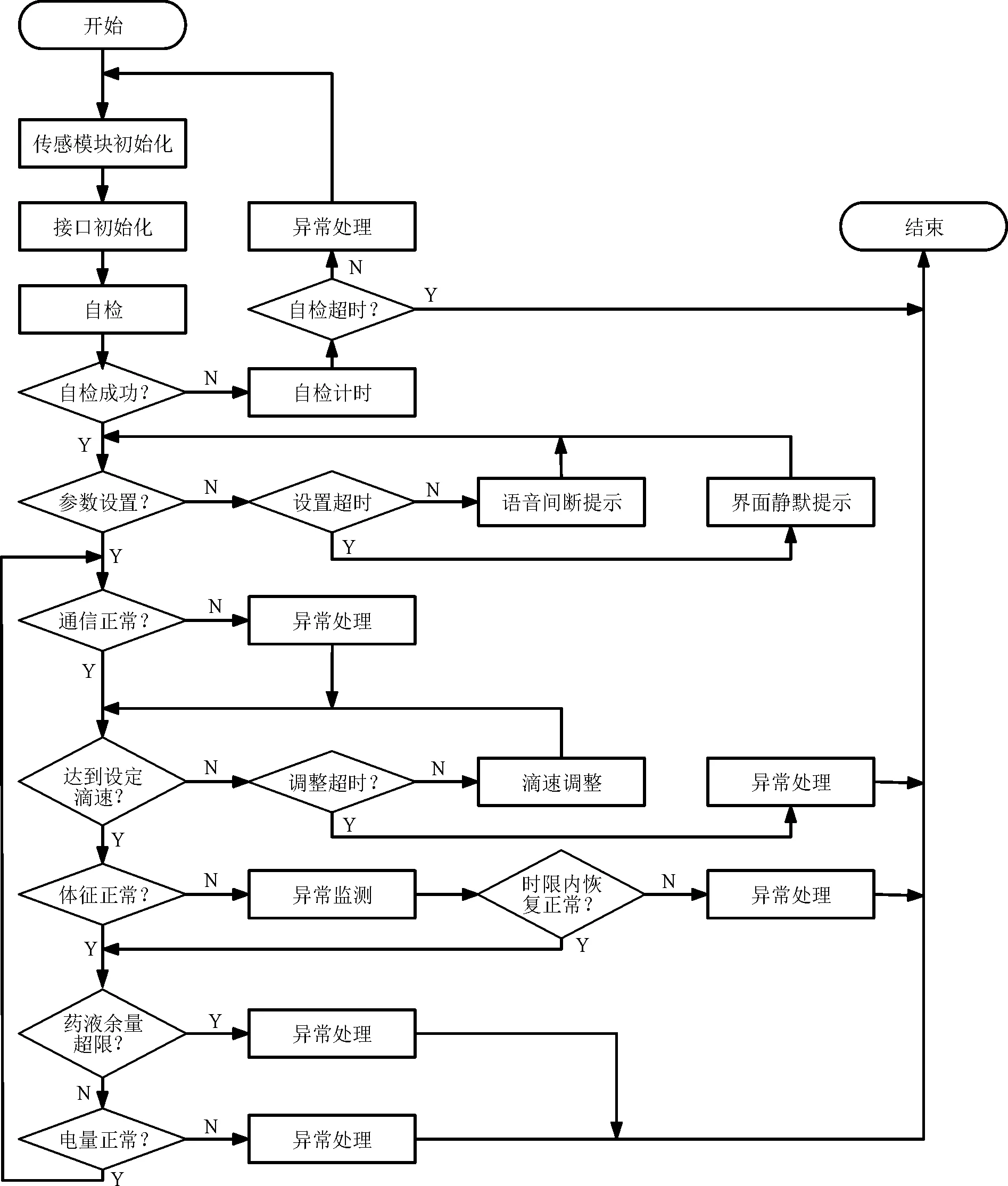
图3 输液主控程序流程
2.2 智能网关软件设计
在Keil-MDK5平台上进行智能网关软件设计调试。智能网关的LoRa模块接收来自输液仪的数据,主控制器根据预设的协议对数据包进行校验,使用NB-IoT模块上发物联网云平台[6]。网关的工作流程如图4所示。
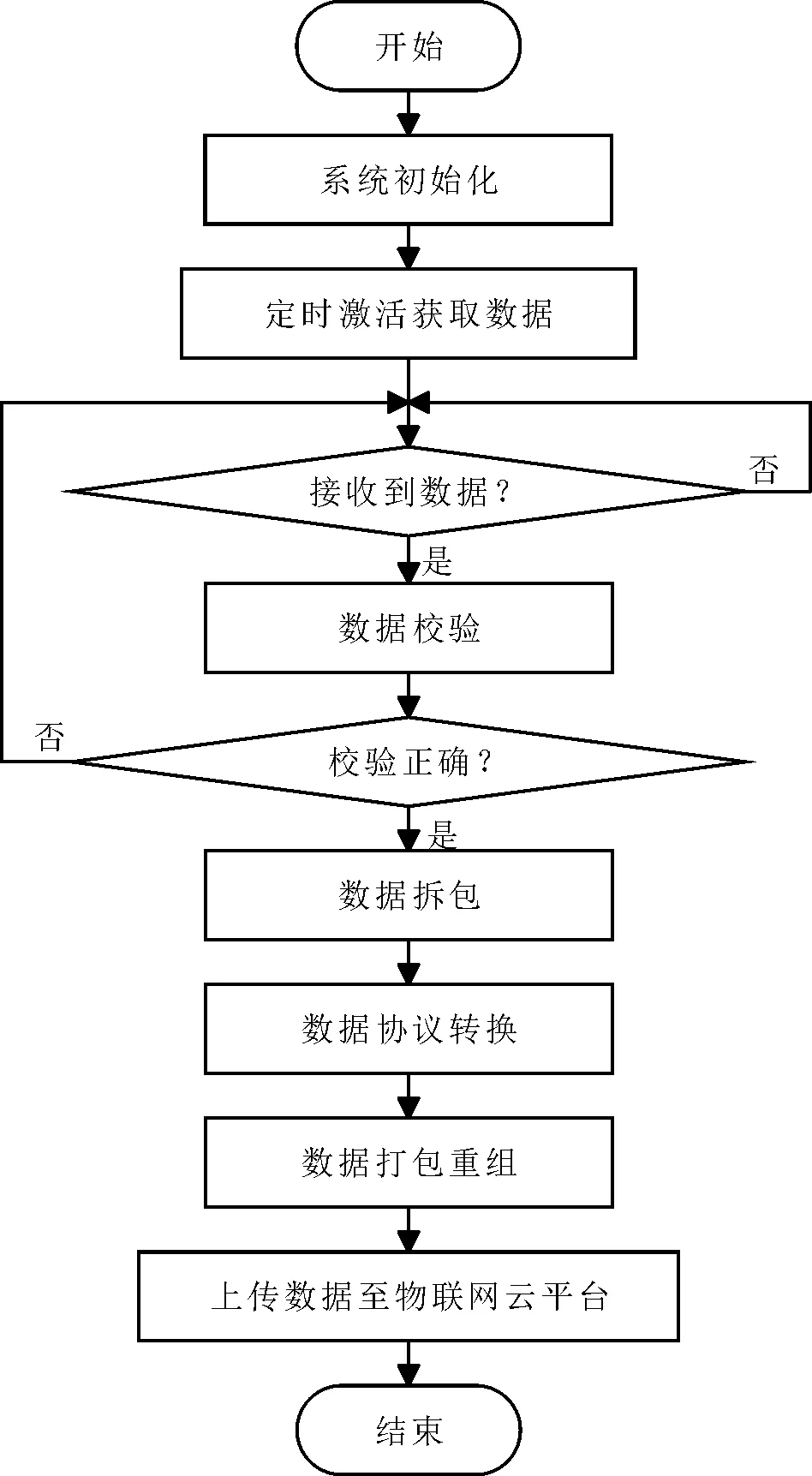
图4 网关工作流程
2.3 物联网平台软件设计
物联网平台中的网络层采用华为物联网云平台作为数据的接收和信令下发的中转站,完成设备 profile 和编解码插件的设计,解析收到的数据和下发应用发送的命令[7]。华为物联网云平台提供的 OceanBooster 平台可以进行无码化开发 Web 应用。应用层主要包括智慧输液的后台管理系统,采用图形用户界面应用程序开发框架Qt作为平台,完成设备数据监控、设备远程控制和设备定位等功能。Qt 具有良好的跨平台特性,所设计的桌面应用程序不仅可以用于 Windows 平台,还可以通过简单的设置和修改将其移植到嵌入式设备,使设计的管理平台具有更广泛的应用场景。
2.4 滴速控制模型建立
在患者输液时,输液管中的药液成脉动式流淌,只有在液滴滴落时,药液液面和其内部压强会发生微细的更新[8]。药液流动的伯努利方程[9]为
(1)
式中:P为药液中某点的压强;v为药液在某处的流动速率;ρ为该瓶药液的密度;g为重力加速度;h为该点所在的高度;C为一个常量。忽略其损失。
在输液过程中,设大气压强为P0,输液瓶上部的气体压强为P1,输液瓶上液面处液体流速为v1,输液瓶口处药液流速和压强分别为v2和P2,茂菲氏滴管上部控制夹处药液流速和压强分别为v3和P3,茂菲氏滴管中气液连接处药液流速和压强分别为v4和P4,茂菲氏滴管口处药液的流速和压强分别为v5和P5,针头处药液流速和压强分别为v6和Pp,输液瓶中液面高度为Δh1,上输液管中药液高度为Δh2,茂菲氏滴管内部药液高度为Δh3,下输液管中药液高度为Δh4,则建立的滴速控制模型如图5所示。
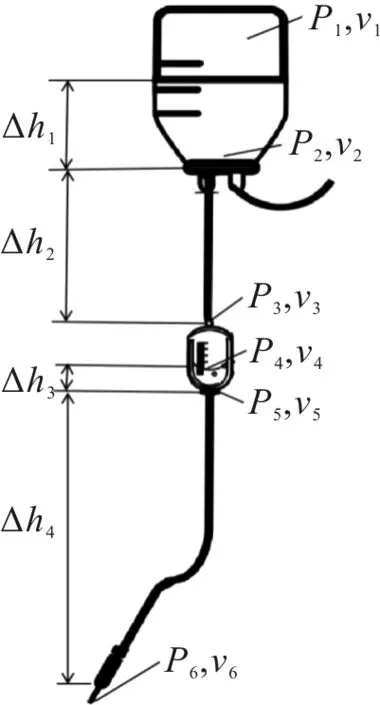
图5 滴速控制模型
近似认为v1=0,v2=0,由式(1)可推导得出
(2)
当排除输液系统的漏气、漏水和阻塞等非正常情况的影响时,当前每分钟输液药液的流量公式可表示为
Q=S·v3=d·V
(3)
式中:d为输液速率;V为药滴的体积;S为输液管切面的面积。
根据式(2)和式(3),输液速率可表示为
(4)
为了使滴速控制的过程更加精确稳定,系统采用步进电机作为执行器[10],根据电机型号不同选取相应参数构造传递函数,其表达式[11]为
(5)
式中:s为复变量;θi为步距角(输入);θ0为转子实际转过的角度(输出);Zr为转子齿数;iA为相电流;L为相电感;B为电机粘滞阻尼系数;J为转子转动惯量。
2.5 智能控制算法
为了达到对滴速的精确控制,系统采用基于遗传算法比例积分微分(Proportion Integration Differentiation,PID)控制器对输液速率进行控制[12]。以二次性能指标最优为衡量标准,利用遗传算法整定PID参数KP,KI和KD。遗传算法优化PID的流程如图6所示。
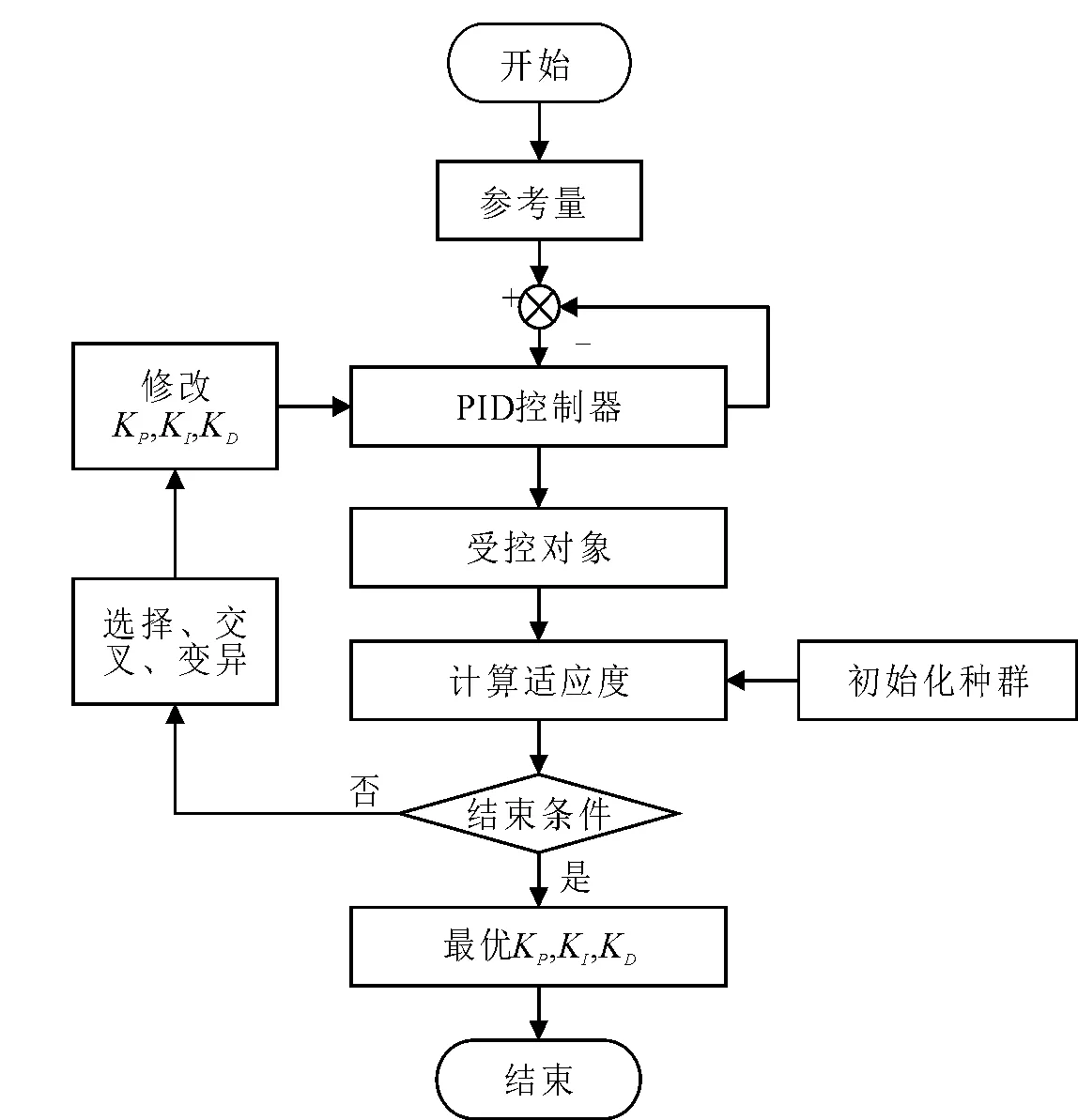
图6 遗传算法优化PID流程
采用误差绝对值时间积分性能指标作为参数选择的最小目标函数[13],为滴速控制模型选取最优的遗传参数。为了使滴速控制模型仅使用最小的控制能量达成最优的效果,目标函数中加入一个平方项,并在目标函数中加入惩罚函数为避免超调[14]。若产生超调,则将超调量作为一项最优指标,若系统无超调,其代价函数为[15]
(6)
式中:e(t)为系统误差;u(t)为控制器输出;tu为上升时间;α、β和η分别为e(t)、u(t)和tu对应的权重。经过权重选择与调试,α取0.999,β取0.001,η取2。
当产生超调时,式(6)可表示为
(7)
其中,
ye(t)=y(t)-y(t-1)
式中,γ为其权重,且γ≫max(α,β,η),γ取100;y(t)为被控对象的输出。
3 系统实验
3.1 滴速控制仿真实验
为了验证滴速控制模型及智能控制算法的可行性,采用实验环境为Windows 10,CPU型号为Intel i5-6200U的计算机,利用Matlab R2016a软件进行仿真[16]。为了使控制效果更加稳定,系统采用步进电机作为被控对象,选取参数Zr=50,iA=1.5 A,B=0.03,J=0.114,L=6.5代入式(5),得到其执行器的传递函数为
(8)
设定遗传算法的种群大小为30,交叉概率为0.9,变异概率为0.033,采用实数编码方式,迭代150次,基于遗传算法PID控制器进行参数寻优,得到PID的3个参数值分别为KP=48.848 9,KI=0.895 7,KD=34.212 3。其代价函数F的优化过程如图7所示。采用基于遗传算法PID控制器的单位阶跃响应如图8所示。
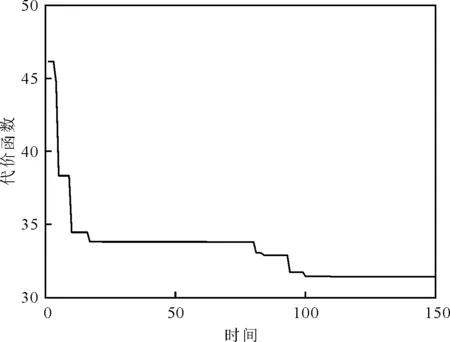
图7 代价函数F优化过程
由图7可以看出,代价函数F的值随时间逐渐减小,即逐渐得到优化,最优代价函数F=31.406 1,验证了滴速控制模型及算法可行性。
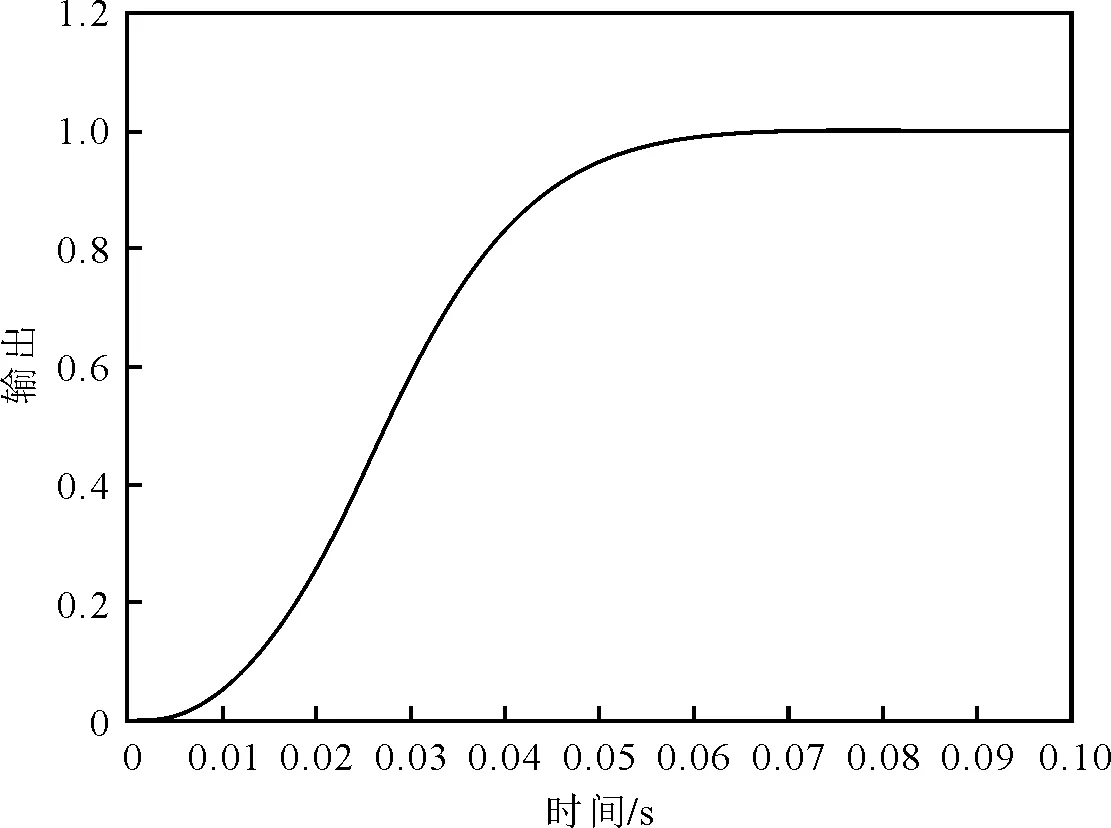
图8 阶跃响应
由图8可以看出,通过阶跃响应对基于遗传算法优化PID的峰值时间为0.071 s,无超调,验证了滴速控制模型的控制时间短、精度高。
3.2 滴速控制实测结果
为了验证输液仪的滴速控制效果,改变点滴的给定值,实验条件为输液管形变范围为0~1.5 mm,滴速控制范围为0~100滴/min,最终测试数据如表1所示。
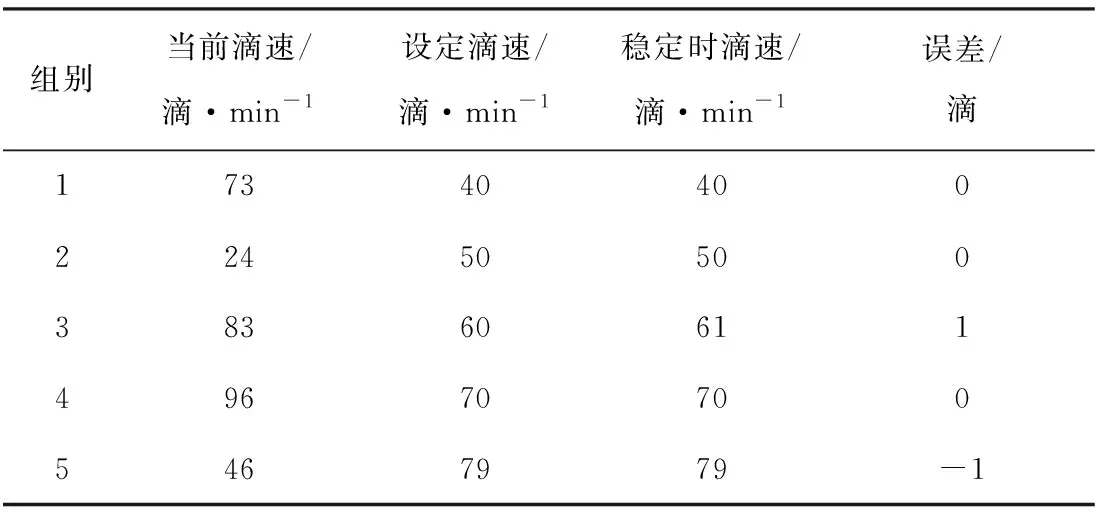
表1 测试结果数据
从表1中数据可以看出,输液仪对滴速的控制可以达到预设值,并且误差为100±1滴,效果良好。
4 结语
基于窄带物联网的智能输液系统采用多元通信网络架构,通过建立滴速控制模型,利用基于遗传算法PID控制器控制滴速,实现了对输液情况的实时监测与精准控制。同时,实时采集现场信息并调整输液进程,包括输液速度、是否发生报警信号等,实现了输液监控的安全化、智能化、网络化和信息化。实验结果表明,该系统对滴速的控制可以达到预设值,误差仅为100±1滴,控制精度高。通过较完备的异常报警机制和可靠的窄带物联网传输,实现了输液全过程智能化管理。
猜你喜欢
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
农技服务(2020年7期)2020-12-17
工业经济论坛(2020年6期)2020-04-13
汽车观察(2018年12期)2018-12-26
妇女生活(2018年12期)2018-12-14
汽车观察(2018年10期)2018-11-06
中国当代医药(2018年12期)2018-06-16
护士进修杂志(2016年10期)2017-01-05
现代制造技术与装备(2015年4期)2015-12-23
健康博览(2015年7期)2015-08-08
