基于卷积神经网络的钝体尾迹识别研究1)
2022-03-19 01:54杜祥波陈少强侯靖尧胡海豹
力学学报 2022年1期
杜祥波 * 陈少强 侯靖尧 ** 张 帆 * 胡海豹 *, 任 峰 *,
* (西北工业大学航海学院,西安 710072)
† (中国船舶集体有限公司第七〇五研究所,西安 710077)
** (中国船舶科学研究中心水动力学科研部,江苏无锡 214082)
引言
在流体中运动的物体通常会留下长长的尾迹,这些尾流场中包含有丰富的运动对象和运动状态信息,可用于探测,甚至用于制导运动[1-4].本文为获得清晰的流场尾迹图像,专门搭建了竖直肥皂膜水洞.由于肥皂膜中的流动是目前最为近似的二维流动[5-7],因此吸引了大量学者的关注.早在2001 年,Rutgers等[8]对二维肥皂膜水洞装置及相关的实验测量方法,流场显示等问题进行了详细的阐述,为后续实验研究打下了坚实的基础.在国内,同样有大量学者基于肥皂膜水洞开展了流体相关研究.例如,高宗海等[9]搭建并测试了用于小雷诺数流动显示研究的水平式肥皂膜水洞,拍摄到钝体在小雷诺数下的细微流动特征.贾来兵[10]利用竖直肥皂膜水洞研究自由摆动的柔性体与流体的相互作用,并建立了相应的数学模型.上述研究有力证实了肥皂膜装置用于显示二维流场尾迹时具有稳定可靠的性能,相关实验研究比较成熟.不过,由于一般钝体的尾流场十分复杂,造成流动结构的分辨仍比较困难,例如,相同特征长度、不同形状钝体的尾迹结构大体相似,单凭人的肉眼难以区分.目前,针对这一问题仍未见相关研究的报道.
随着深度学习算法的发展,以数据驱动方式建立特征识别与预测模型的方法[11-12],已经在许多领域取得了良好的应用效果.如赵西增等[13]利用卷积神经网络(CNN)对不同工况下的波浪透射系数及透射波波形进行了成功预测.Roggen[14]基于CNN和长短期记忆神经网络(LSTM)的模型和多模态可穿戴设备实现了对人体活动的识别.Dong 等[15]基于无监督学习的CNN 模型准确识别了交通工具类型.魏晓良等[16]利用混合的LSTM 和CNN 对高速柱塞泵的空化程度进行了预测,该模型在无噪声情况下准确率高达99.5%.可见,卷积神经网络在用于数据预测和特征识别时,具有优异的精度特性.
基于深度学习方法,前人虽做过不少特征识别研究,但由流体尾迹结构预测钝体形状或判断雷诺数的研究尚未见报道.针对同一特征长度不同类型的钝体,尾迹结构十分相似,即尾迹图像对应的钝体形状信息或雷诺数难以提取.因此,本文提出基于卷积神经网络的尾迹识别方法,通过竖直肥皂膜水洞,采集三种钝体的尾迹作为CNN 的输入,对应钝体的形状或雷诺数作为CNN 的输出,由卷积神经网络建立相应的数据映射关系,以期实现根据尾迹图像准确识别出对应钝体的形状或雷诺数的效果.
1 实验平台
1.1 竖直肥皂膜实验装置
竖直肥皂膜装置结构如图1 所示[17],肥皂膜水洞主要由上水箱、喷嘴、流量调节阀、导引线、下水箱和水泵等组成,支撑结构采用4040C 铝型材,整体装置高约2.5 m,宽约0.6 m.
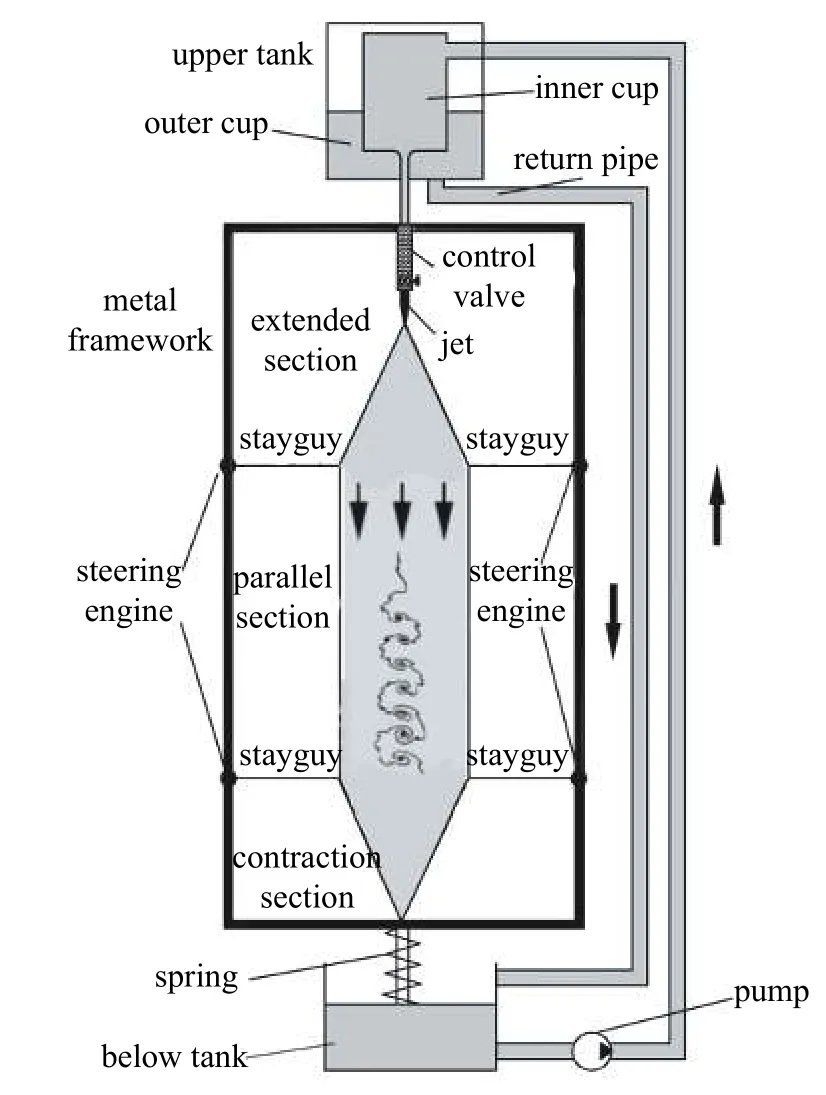
图1 肥皂膜水洞结构图Fig.1 Schematics of the vertical soap-film tunnel
肥皂液采用工业洗洁精和水按体积比为1:4 配置,搅拌均匀后放置在下水箱中,在水泵的作用下输运至上水箱.装置顶部的上水箱采用有机玻璃制成,并分为内杯和外杯.肥皂液泵入上水箱内杯,由于水泵输出的流量大于实验需要的流量,保证在实验过程中内杯顶部的溶液能够一直溢流到外杯,使系统的水头高度保持不变.内杯下端连接流量调节阀,通过调节流量调节阀改变系统的流速.实验前,4 根拉线处于放松状态,两根导引线合拢.打开流量调节阀后,在重力的驱动下,肥皂液经由上水箱与喷嘴流出,待导引线完全被肥皂液润湿后,舵机自动拉开导引线从而避免手动牵引引入误差,此时会形成宽14 cm的导流框,导流框分为3 段,即扩张段、平行段和收缩段.平行段肥皂膜由于重力和空气阻力相对平衡,流速平稳,作为试验段并用于捕获流场尾迹特征.肥皂液流回下水箱,再由水泵泵入上水箱,从而循环往复工作.
1.2 钝体模型及图像采集系统
典型钝体模型采用3 种截面形状为圆柱,三角柱和方柱的钝体.材料采用白色树脂,利用3D 打印技术加工,特征长度统一取10 mm,并垂直于来流方向放置在水洞试验段.钝体的展向长度远大于肥皂膜的厚度,保证该流动实验有效近似二维流动.
实验采用光学干涉法来显示流场,图2 为照明和拍摄装置的位置示意图.为使拍摄到的尾迹图像清晰,选择功率为800 W 的高压钠灯作为干涉光源,在高压钠灯前布放一块柔光板,使钠灯光线更均匀,尾迹图像更加清晰、光亮.待钠灯亮度稳定后,进行实验拍摄,拍摄的装置为高速相机和高清单反相机,高速相机拍摄钝体尾迹近场形态结构,还用于标定实验系统的流速,拍摄频率为500 帧,分辨率960 ×240,高清单反相机主要是录制钝体后的尾迹结构,频率为10 帧,分辨率4096 × 2160.
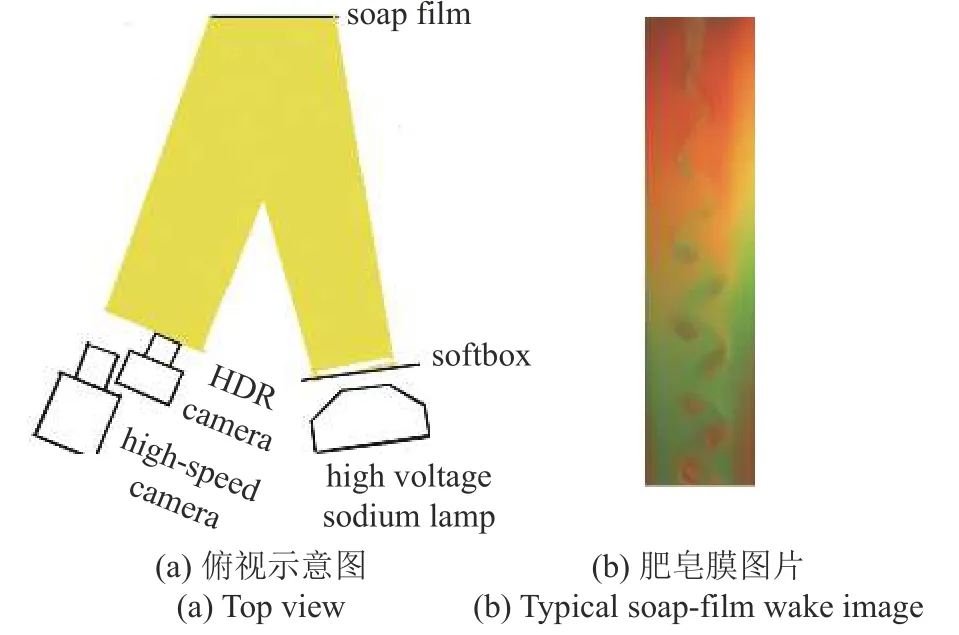
图2 照明和拍摄装置示意图Fig.2 Positions of the lighting device and the shooting device
2 实验测量和图像捕捉的方法
2.1 肥皂膜参数测量
实验中采用粒子示踪法测量肥皂液流速,即通过高速摄影技术捕捉肥皂膜中伴流颗粒物(肥皂液落入的少量微颗粒,不需要另加粒子)在前后两帧照片中的位移量来换算出肥皂膜流速.为减小测量误差,这里进行3 次重复测量,取平均值(速度的相对误差<2%).从图3 中给出的流量与液膜流速对应关系曲线可以看出,该装置流速稳定可调,调速流速范围为1.0~ 2.0 m/s.
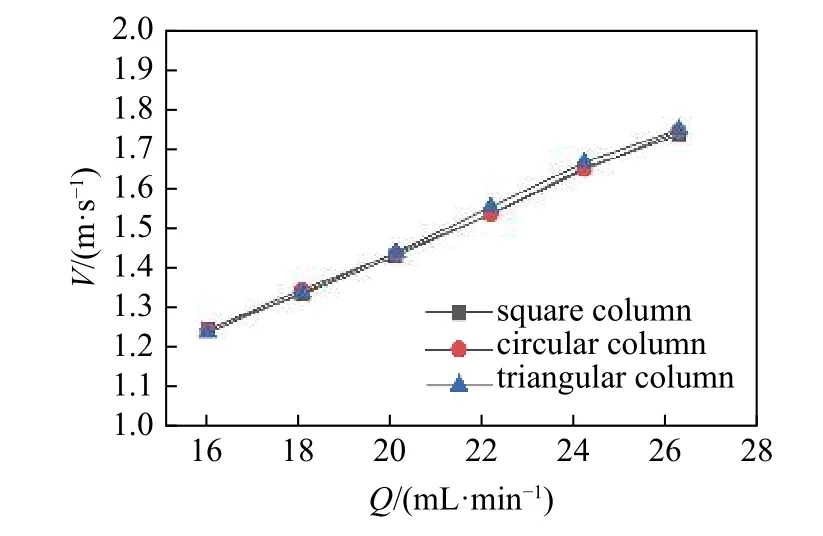
图3 不同流量下的速度曲线Fig.3 Velocity curves at different flow rates
实验在求解肥皂膜黏性系数和雷诺数时,利用文献[18-19]中的单圆柱绕流实验的Re-St拟合关系的经验公式求解
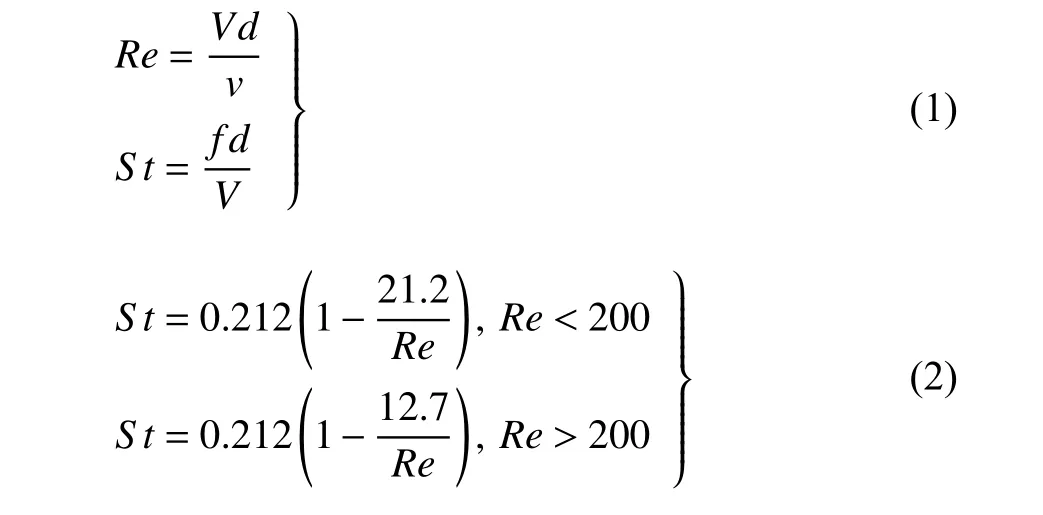
式中,f表示圆柱涡街脱落频率,d为圆柱直径,V为来流速度,v为流体的运动黏性系数.
为了更好的计算涡脱落的个数,采用直径较大的圆柱,实验采用的圆柱为d=10 cm,在V=1.43 m/s的条件下,测得其脱涡频率f=29,并计算出相应的St=0.202 80,利用Re-St拟合关系经验公式求出Re=300,最后利用雷诺数公式,计算出肥皂液在此流速下运动黏性系数为v=4.77 × 10-5m2/s.
肥皂膜的厚度也是肥皂膜实验装置关键的参数之一,不同的肥皂膜的厚度,干涉出的肥皂膜颜色不同,因此肥皂膜的厚度在实验中应均匀一致,使得肥皂膜干涉的流场区域内颜色均一.该实验肥皂膜厚度利用流量公式求解

式中,Q为流量,V为流速,L=14 cm 为肥皂膜试验段宽度,B为肥皂膜的厚度.
如图4 为肥皂膜速度和膜厚关系曲线,由图可知,随着速度的增大,肥皂膜的膜厚也逐渐增大.对比潘松和田新亮[20]的实验结果,在同一流速下,本实验肥皂膜的厚度较低,是因为该实验肥皂膜试验段的宽度L=14 cm,相比潘松肥皂膜试验段的宽度大3 cm,所以在相同的流速下,该实验肥皂膜的厚度较小,但具有相同的增长趋势.
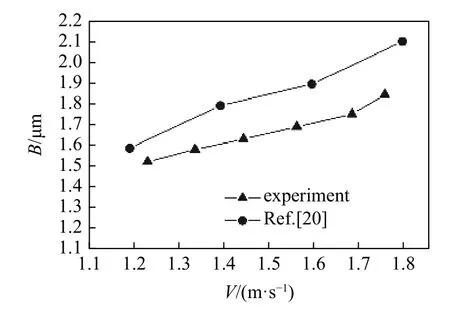
图4 肥皂膜厚度与流速关系Fig.4 Relationship between the film thickness and the flow rate
2.2 实验尾迹图像采集
实验分别采集了Re为160,220,275,480 和550下3 种钝体的尾迹图像,每种工况采集600 张时间序列的尾迹图像,时间间隔为0.03 s(速度在1.41 m/s 每个尾涡脱落的时间间隔),15 种工况下共采集9000 张尾迹图像作为数据集.如图5,在V=1.41 m/s,Re=295 时,圆柱、三角柱和方柱3 种钝体产生的尾迹.

图5 典型钝体绕流尾迹图像Fig.5 Image of wake around a typical blunt body
从典型钝体绕流尾迹图像中可以看出,在流动过程中,随着逆压梯度的增加,肥皂液流体边界层在钝体表面开始分离,经过一段距离的发展,可以清晰地看到两排平行而方向相反的尾涡结构,并按照一定的间距在空间交错排列,该结构为卡门涡街.这3 种钝体涡脱落之间的距离相近,即对于相同特征长度、不同形状钝体的尾迹结构相似,仅靠人眼从尾迹结构图像分辨产生尾迹对应的钝体类型和时下的雷诺数是不易的.
3 卷积神经网络识别模型
3.1 卷积神经网络
卷积神经网络[21-25]是深度学习的一种算法,它充分利用局部相关性和全值共享的思想,大量地减少网络的参数量,提高训练效率,其强大的特征提取能力使它在图像识别方面尤为突出.卷积神经网络一般由输入层、卷积层、池化层、全连接层和分类层组成[26].该网络主要功能是特征提取和识别,卷积层和池化层用于提取深层次的特征信息,全连接层和分类层构成识别分类模式,通过全连接层将图像转化为一维向量,最后由分类层输出图像所属类别[27].
3.2 尾迹识别分类模型
分析卷积神经网络原理之后,提出基于卷积神经网络的尾迹识别模型,输入信息是不同钝体形状下采集的尾迹图像,输出是钝体形状或雷诺数的预测值.搭建的网络结构如图6 所示,主要结构是卷积层,池化层,全连接层组成.由文献[28]可知卷结核越小,深度相对越深,模型性能越好,该模型的卷积核大小为5 × 5,神经网络层数共11 层,即卷积层和池化层各4 层,全连接层2 层,参数采用金字塔架构(网络结构的特征数目按倍数增加),更能有效利用计算资源.网络模型结构中的dropout 的作用[29-30]是按照一定的比例随机剔除部分神经元个数,有效防止过拟合现象[31-32],该比例设置为0.5,其他具体的参数设置如表1 所示.
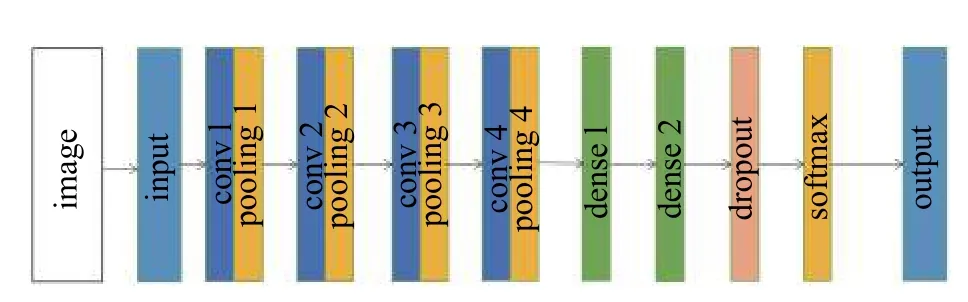
图6 尾迹识别CNN 模型Fig.6 CNN model for wake recognition
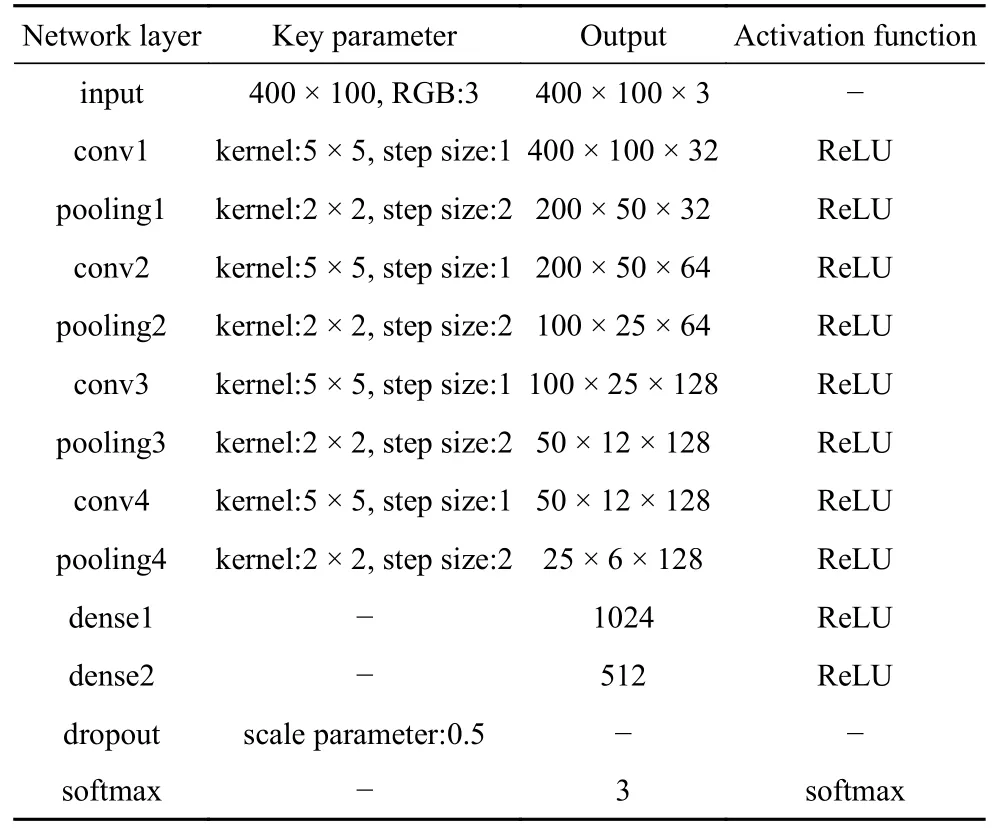
表1 CNN 网络结构参数Table 1 CNN network structure parameters
尾迹分类识别是一个多分类问题,故损失函数采用多分类交叉熵损失函数,其表达式为

式中,N为数据样本数,M为钝体类别数量,yic为指示变量,预测类别与样本类别相同取1,反之为0;pic为样本预测类别的概率,由softmax 层输出.
4 实验及分析
4.1 模型识别的流程
通过竖直肥皂膜实验,采集5 种不同雷诺数下3 种钝体的尾迹图片,实验依据尾迹图像采集方法进行采集.然后按照如下步骤进行数据处理和模型训练,首先为保留图像视野内全部为尾迹结构,将尾迹图像统一调整像素大小为400 × 100,然后按照训练集,验证集和测试集比例为4:1:1 划分数据集,其中验证集和测试集均未参与模型训练,仅用于评价模型的优劣,再根据模型参数建立卷积神经网络模型并导入图像开始训练,最后利用混淆矩阵显示测试结果.如图7 所示,卷积神经网络训练的流程.
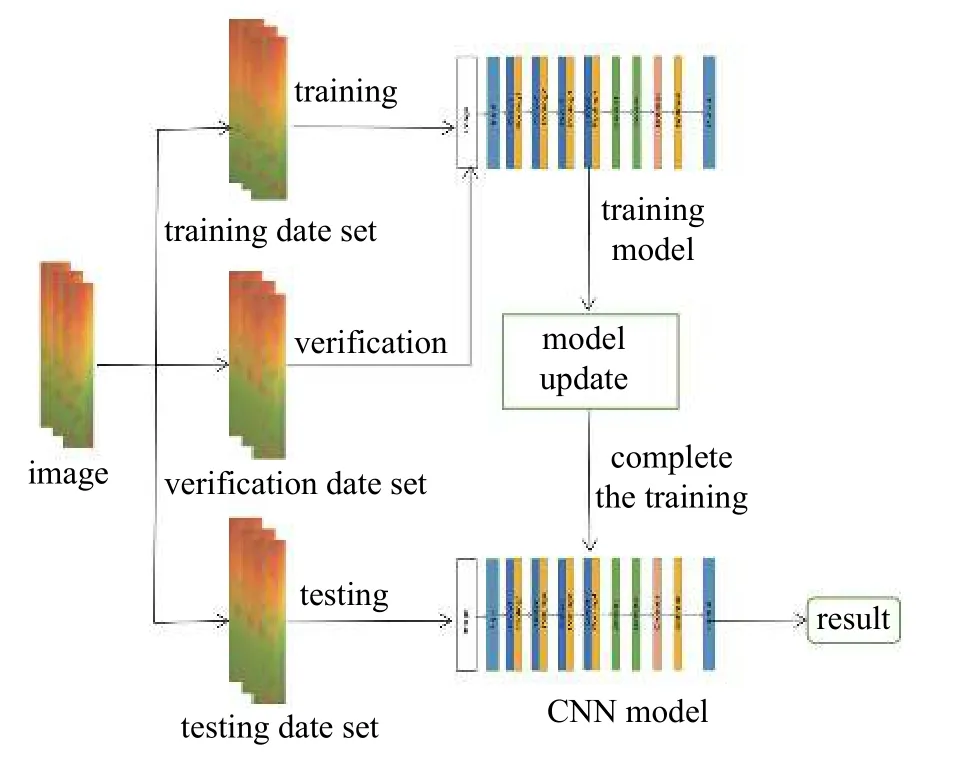
图7 CNN 流程图Fig.7 Flow chart to establish the CNN model
4.2 相同雷诺数尾迹识别结果分析
实验按照每间隔0.03 s 采集一次尾迹图像,采集Re=275,特征长度为10 mm 的三角柱,方柱,圆柱的尾迹图像各600 张,共1800 张尾迹图像作为数据集,任取其中1500 张(每种钝体尾迹图像各500 张)导入CNN 中进行训练,学习速率0.001,迭代次数为120 步.剩余的300 张作为测试集用于评价模型优劣.图8 给出了卷积神经网络的损失函数值和验证集正确率,由图可知在模型开始迭代,损失函数值快速下降,在迭代15 步时,损失函数值开始收敛并趋于0.而验证集的正确率,通过图像可知迭代40 步时,正确率逐渐趋于1.
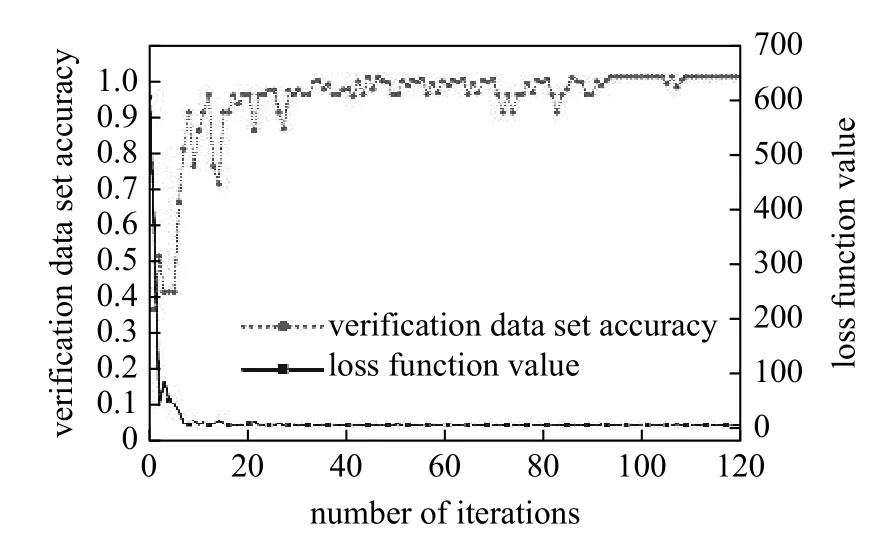
图8 卷积神经网络的损失函数值和验证集正确率Fig.8 Loss function value and verification data set accuracy of the CNN
模型训练后,对该模型进行图像识别测试实验,将测试集300 张尾迹图像导入模型进行评估,运用混淆矩阵显示实验结果,如图9 所示,case1,case2,case3 分别表示方柱,圆柱,三角柱的钝体尾迹识别情况.方柱正确识别率为98%;圆柱中正确识别率为98%;三角柱正确识别率为97%;整体效果来看,正确识别率为97.6%,该模型识别效果良好.
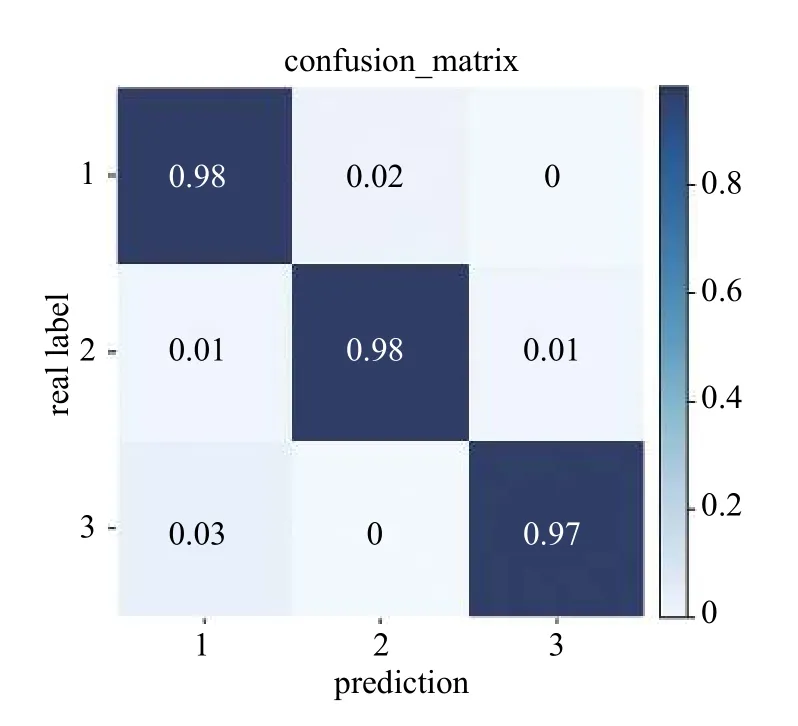
图9 测试识别结果Fig.9 Test recognition results
为进一步验证该网络模型是否具有一定的鲁棒性,对测试集300 张图片进行处理,每张图片进行裁剪至原图像的80%大小,利用训练的好的卷积神经网络模型进行测试.实验结果如图10 所示,虽然每种钝体实验结果均有所降低,但识别的正确率均在90%以上,仍有较好的识别能力,验证模型具有一定的鲁棒性.
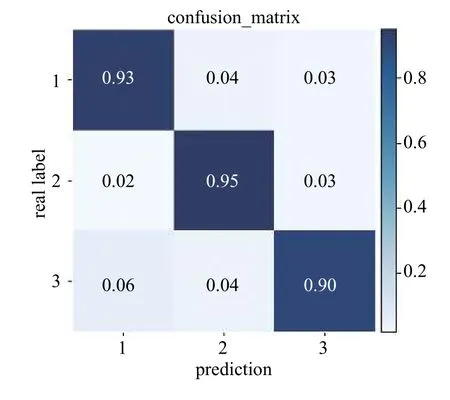
图10 图像裁剪后的识别结果Fig.10 Test image recognition results with reduction
4.3 不同雷诺数尾迹识别结果分析
通过4.2 可知,在相同雷诺数下的测试结果比较好,基于此,实验又对不同雷诺数下的尾迹图像进行训练并测试,在Re为160,220,480 和550 下采集3 种钝体的尾迹图像,每种工况下采集600 张,共7200 张尾迹图像,其中6000 张(每种钝体每个雷诺数下各500 张)尾迹图像导入卷积神经网络模型中用于训练模型.
模型训练结束后,运用该模型识别测试集的1200 张图像对应的钝体形状,用于评估模型优劣,实验结果为图11.图中case1,case2,case3 分别表示方柱、圆柱、三角柱的钝体尾迹识别情况.由混淆矩阵可知,三角柱识别的正确率最高为97%,且每种类型的识别准确率也均在95%以上;从整体效果来看,测试集的正确识别率为96%,体现训练的模型具有学习雷诺效应的能力,对不同雷诺数下的尾迹图像具有良好的表现效果.
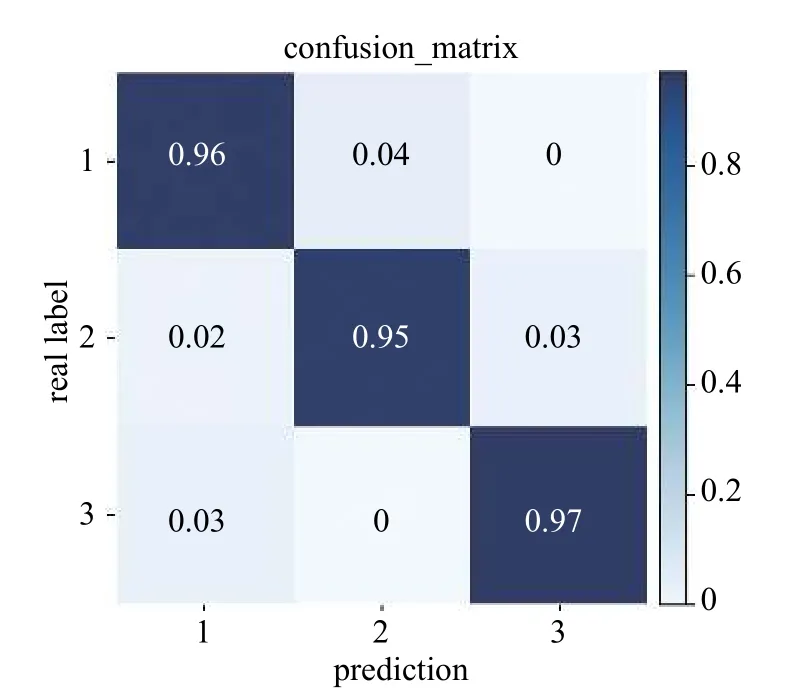
图11 不同Re识别结果Fig.11 Different Rerecognition results
为进一步验证模型对相近的雷诺数实验工况的识别能力.把训练好的不同雷诺数模型去识别Re=275 的实验数据,识别结果为图12,虽然较识别相同工况(图11)的尾迹正确率有降低,但识别该雷诺数下的数据正确率均在93%以上,体现训练的模型用于识别相近的工况,仍具有良好的识别能力,该模型具有一定的泛化能力.
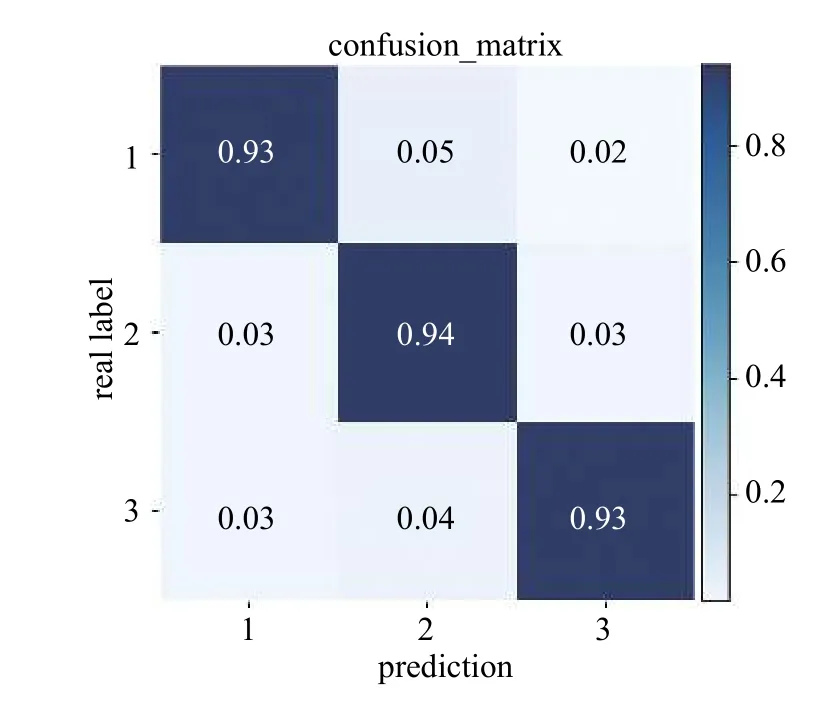
图12 相近工况识别结果Fig.12 Identification results of similar working conditions
4.4 尾迹识别钝体形状和雷诺数
上述实验均是通过尾迹图像识别相应的钝体形状,仅涉及一个变量.为验证该模型对多变量识别的能力,即通过尾迹图像,识别出尾迹对应的钝体形状和雷诺数.接着又做了如下实验,实验工况如表2 所示,
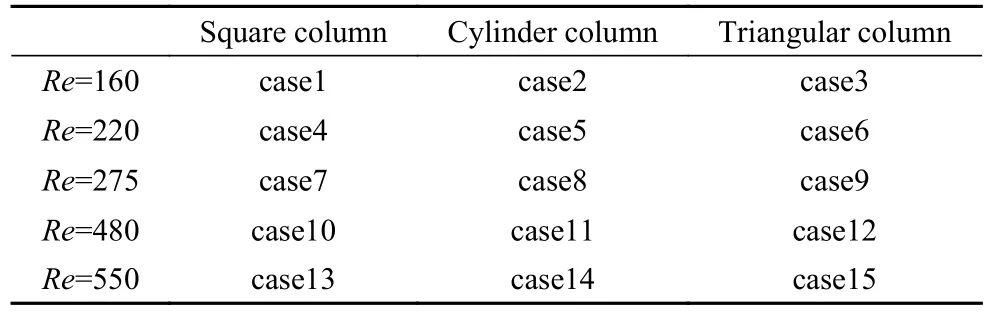
表2 实验工况Table 2 Experimental conditions
在Re为160,220,275,480 和550 下采集3 种钝体的尾迹图像,每种工况下采集600 张,共9000 张尾迹图像,其中7500 张尾迹图像导入卷积神经网络模型中,学习率为0.001,迭代次数为300 步.余下1500 张图像(每种钝体在每个Re下各取100 张)作为测试集用于评价模型优劣.
图13 为卷积神经网络的损失函数值和验证集正确率,由图可知在模型开始迭代,损失函数值快速下降,在迭代270 步时,损失函数值开始收敛并趋于0.001.而验证集的正确率,通过图像可知迭代100 步时,正确率逐渐趋于1.
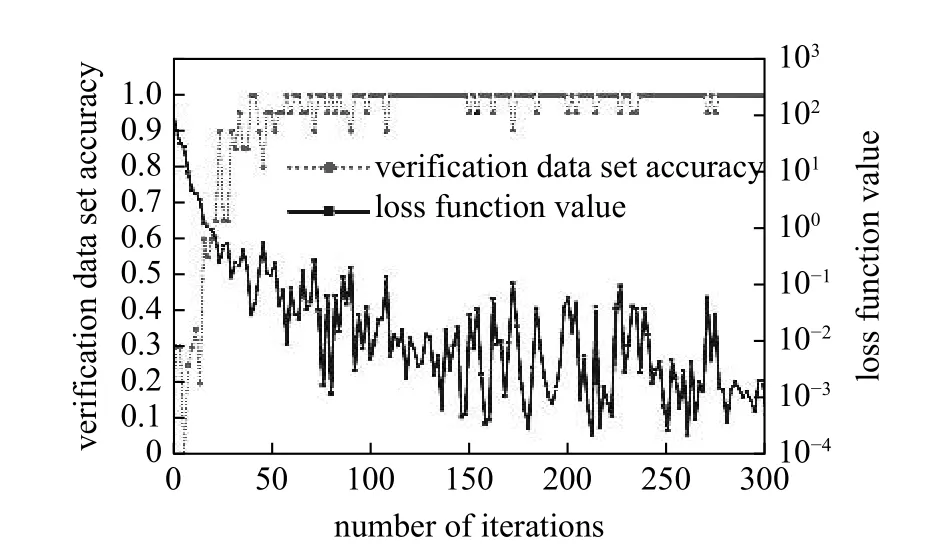
图13 卷积神经网络的损失函数值和验证集正确率Fig.13 Loss function value and verify set accuracy of CNN
模型训练结束后,运用该模型识别测试集的1500 张图像(每种钝体每个雷诺数下各100 张),实验结果为图14 所示,在识别钝体形状和雷诺数两变量时,而在识别case6 和case9 的准确率最高为97%,识别效果最好.但识别case3 时,即Re=160,三角柱的尾迹,识别准确率最低为82%,通过混淆矩阵可知,识别错误的图像多发生在同一雷诺数或相同的形状下,原因可能是在这些条件下,尾迹图像结构较相近,易混淆.另一方面,对于较大的数据量且类别比较多的识别问题,所建立的卷积神经网络模型较简单,可能使卷积神经网络的深度不足,从而使网络不能从尾迹图像提取更深层次的特征结构,使得模型识别多变量问题时易出错,导致模型识别性能变差的原因.从整体上来看,实验识别混放1500 张尾迹图片的准确率为91%,说明该模型用于由尾迹图像,同时识别出尾迹图像的雷诺数和产生尾迹钝体的类型,仍具有不错的识别能力.
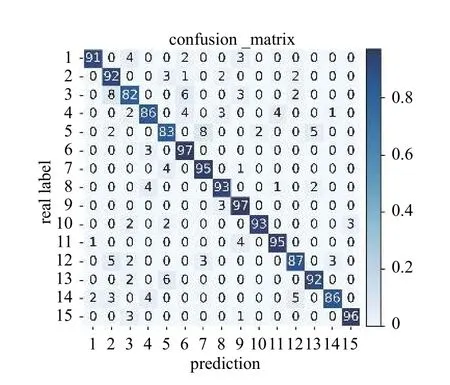
图14 混放识别结果Fig.14 Mixed identification results
4.5 可视化分析
模型的识别效果在实验数据上得到了初步验证,但机器学习过程难以表达.为直观理解 CNN 模型卷积层和池化层对尾迹特征的学习过程,采用tensorboard 对卷积池化后进行可视化.每层卷积池化后的图像如图15 所示,卷积层和池化层提取输入图像的边缘、轮廓特征,可看成是边缘检测器,并把相似的特征合并起来,使得特征对噪声和变形具有鲁棒性,从图上可看出,各层提取的特征以增强的方式从不同角度表现原始图像,但是随着层数的增加,其表现形式越来越抽象,特别在在第4 次卷积池化后,得到的尾迹图像特别抽象,人眼已无法识别出尾迹图片提取的哪些特征,仅有机器才能辨别其代表的特征含义.
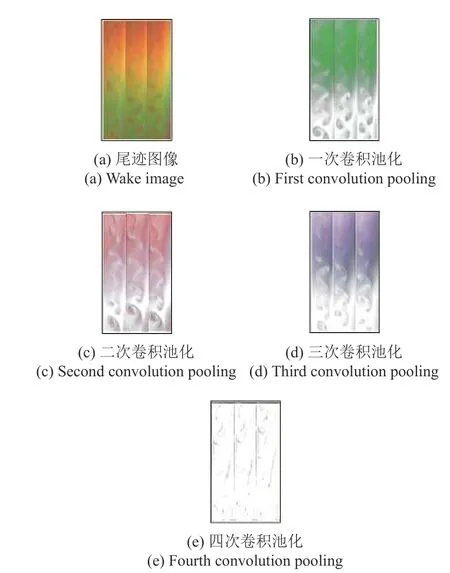
图15 卷积池化过程Fig.15 Convolutional pooling process
5 总结
本文利用机器学习实现了从尾迹图像中提取钝体结构信息的设想,即建立的卷积神经网络完成了对结构相近的肥皂膜尾迹图像,能够准确地识别出尾迹图像对应的钝体形状和雷诺数.该方法为进一步利用人工智能提取流体尾迹中的物理信息提供了借鉴.具体而言,本文可得出以下结论.
(1)利用卷积神经网络,建立了尾迹图像与钝体形状之间的映射关系,该模型在相同雷诺数下,验证300 张尾迹图像的准确性为97.6%;该模型识别裁剪的尾迹图像,即保留原图像的80%,每种钝体识别的正确率均在90%以上,仍具有较好的识别能力,说明该模型具有一定的鲁棒性.
(2)对于不同的雷诺数尾迹图像下,验证不同雷诺数1200 张尾迹图像的识别出钝体形状的准确率为96%,体现该模型具有一定的学习雷诺效应的能力.利用该模型识别相近雷诺数的尾迹图像,同样具有超过90%的准确率,说明模型具有一定的泛化能力.
(3)在识别钝体形状和雷诺数双变量时,测试集结果表明网络识别的性能一定程度上出现恶化,可能是卷积神经网络结构相对简单,深度不足等原因造成的.基于此,未来工作将继续围绕卷积神经网络结构的改进等方面进行,同时考虑把时间维度信息导入模型中,从而进一步提高对多变量的识别精度.
猜你喜欢
农业工程学报(2022年12期)2022-09-09
医学食疗与健康(2022年3期)2022-04-23
健康体检与管理(2021年6期)2021-11-17
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年9期)2021-11-02
计算机系统应用(2021年9期)2021-10-11
故事作文·低年级(2021年6期)2021-06-23
家教世界·创新阅读(2016年11期)2016-12-27
故事会(2016年15期)2016-08-23
学苑创造·A版(2016年1期)2016-03-10