基于搜索优化的“FAST”主动面板调节方案设计*
2022-03-16 00:28牛伯钦危浩彬
贵州科学 2022年1期
王 一,邓 强,牛伯钦,危浩彬,郭 祥
(贵州大学大数据与信息工程学院,贵州 贵阳 550025)
“Fast”望远镜是国际上具有极高灵敏度的500 m口径球反射面射电望远镜,通过主动反射面的调节来观察天体。主动反射面调节技术是提高射电望远镜观测精度的重要技术手段。为建立主动面板移动模型以得到观测效果最佳的工作抛物面,需要在获得理想抛物面的基础上通过在约束条件下移动主索点使工作抛物面尽可能贴合理想抛物面,获得最大光线接收比。为此,我们首先做出如下几条基本假设:
1)理想抛物面底点与工作抛物面底点重合且均在基准球面上;
2)天体光线为平行光;
3)主索点位置仅有其对应促动器决定,不受其余索点运动影响;
4)反射板为平面,表面光滑且各向反射性一致;
5)电磁信号在空间、反射面均无损耗,馈源舱接收面可完全接收射入的信号。
1 旋转抛物面模型
对于旋转抛物面模型,首先建立理想抛物面模型,再先后将所得理想抛物面分别绕z轴、x轴旋转得到绕原点旋转的旋转抛物面模型,最后代入对应方位角度和焦距求解模型。
1.1 模型建立
首先得抛物面方程:
其中,p为两倍焦距长,即p=2F,再经过两次绕轴旋转得到旋转后抛物面方程。
设θ为逆时针旋转角,根据二维坐标轴旋转公式将xOy二维坐标轴旋转,z轴在此次旋转中不变。

(1)

(2)

(3)
由式(2)、式(3)得到新抛物面的坐标x″y″z″对于原坐标xyz的变换公式,再进行矩阵求逆即可得到在原坐标系中抛物面的坐标表示:
(4)

1.2 模型求解
首先需要确定抛物面的焦距,从而确定抛物面的几何方程,已经假设抛物面底点在基准面上,因此需得出基准球面上主索点到球心的距离[2-3]。随机均匀抽取12个主索点位置计算这些主索点到球心(原点)的距离,见表1。
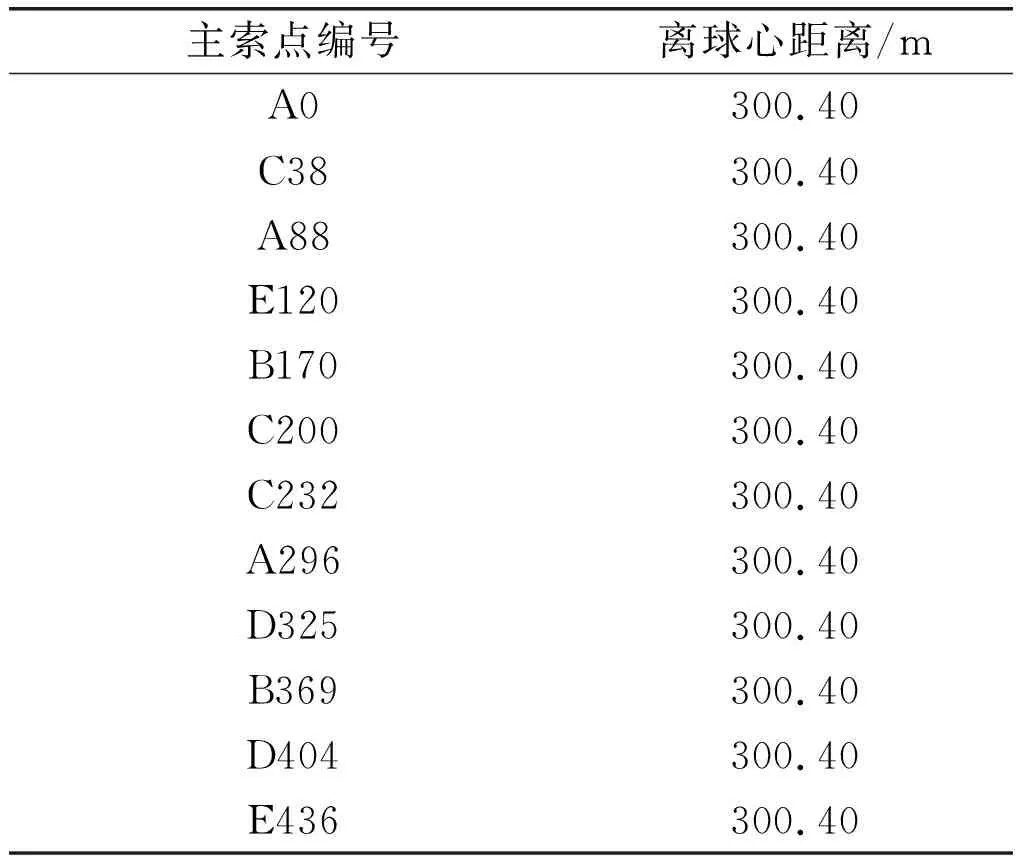
表1 主索点到原点距离Tab.1 Distance from main cable points to the origin
可以看出,由于反射面受重力向下拉伸使基准面实际位置下移产生与题中所给标准300 m球面半径的误差。由于促动机的伸缩范围为±0.6 m,因此实际基准球面与理想300 m半径球面之间产生的0.4 m误差不可忽略。根据题中所给焦径比为0.466,代入实际球面半径为300.4 m,可以得出焦距F=139.9864 m。
根据假设中抛物面底点在基准球面上,将得到的抛物面方程整体向z轴负方向平移300.4 m就可以得到理想抛物面方程:
z=1.786·10-3(x2+y2)-300.4 m
(5)
要求抛物面的口径为300 m,将抛物面方程的x、y轴坐标限制在-150~+150 m范围内得出口径为300 m的理想抛物面,见图2、图3。
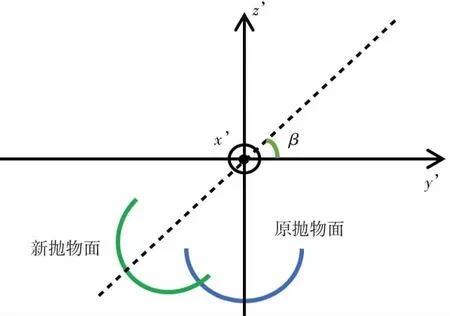
图1 抛物面三维坐标旋转Fig.1 Three dimensional coordinate rotation of the paraboloid

图2 基准球面与抛物面俯视图Fig.2 Top view of the reference sphere and the paraboloid

图3 基准球面与抛物面正视图Fig.3 Front view of the reference sphere and the paraboloid
其中散点曲面为理想抛物面,实心曲面构成基准球面。通过可视化可以看出,理想抛物面部分存在于基准球面外侧而部分处于内侧。
结合反射面板调节因素,即在基准状态下,促动器顶端径向伸缩范围为-0.6~0.6 m,故可做出促动器顶端伸缩至极限的基准面方程:
x2+y2+z2=300.4±0.6
(6)
则由此式(6),即可判断工作抛物面能否实际贴合到构造出的理想抛物面。
接下来计算在固定天体方位角、仰角α=36.795°,β=78.169°时的旋转抛物面方程[1,4]。将式(4)代入原抛物线式(5)中得理想抛物面方程为:
[(6.000×10-1x+7.838×10-1y-1.642×10-1z)2+(8.008×10-1x-5.862×10-1y+1.228×10-1z)2]×1.786×10-5-2.050×10-1y-9.788×10-1z-30040=0
(x,y,z单位均为cm)
(7)
原抛物面顶点坐标为(0,0,-30040),代入坐标转换公式(4)即得到理想抛物面顶点坐标为:(49.3200,36.8894,-294.0185)(m)。
如图4所示,水平面点集为基准球面,倾斜面点集为理想抛物面。
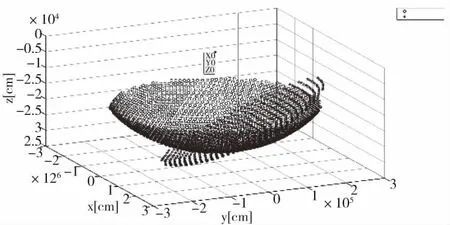
图4 理想抛物面与基准球面对比图Fig.4 Comparison between the ideal paraboloid andthe reference sphere
2 馈源舱接收比评估模型
对于馈源舱接收比评估模型,首先建立面板反射方程,根据馈源舱位置得到反射光投影面模型,再计算反射板的板光密度得到反射光强模型,最后在对应反射板投影面内利用蒙特卡洛法得到馈源舱接收比评估模型[5~6]。

图5 反射面板投影示意图Fig.5 Schematic diagram of reflector projection
因为天体光线是平行光源,先根据每块反射面板的三个顶点位置得出该反射面板的法向向量,再由入射光向量与反射板法向向量得到入射点为反射板三个主索点的三个反射向量。以焦点位置为面上一点,平行光方向为目标面法向量得到馈源舱圆环所在的目标平面方程,将各反射面板的三个反射光向量延长直至到达目标平面,得到反射光在目标平面上的投影点位置,此时每个反射板的三个投影点构成一个投影面,该投影面容纳了所有来自对应反射板的反射光线。
由于每块反射板在垂直平行光方向的有效面积不同,我们定义第i个反射板在垂直平行光方向上的有效面积与反射板的实际面积之比为板光密度ρi。利用蒙特卡洛法在反射板的投影面上随机生成10000×ρi个点作为反射板反射的光线,计算10000×ρi个点到馈源舱的距离L,其中L≤0.5 m的点为反射到馈源舱内部的点,馈源舱内部点与蒙特卡洛法生成点个数之比为馈源舱对该反射面板的接收比,馈源舱对所有反射面板接收比之和为最终馈源舱接收比。
2.1 建立反射光向量求解模型

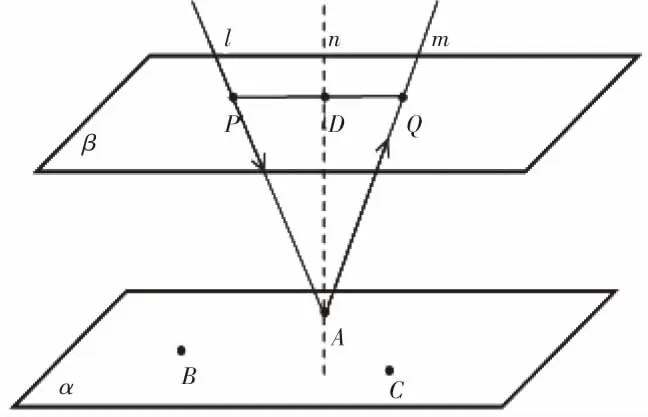
图6 入射光在平面反射光线的求解Fig.6 Solution of incident light reflected on the plane
(8)
在入射直线l在α上半部分任取一点P(p1,p2,p3),可知P满足l方程;再过P点作平行于α的平面β,过A点的法线n方程与平面β方程为:
(9)
式(9)联立可得法线n与平面β的交点D坐标D(d1,d2,d3),由几何关系可得若点P以点PD延长至反射线m,可交于一点Q(q1,q2,q3),D即为线段PQ的中点:
(10)

(11)
2.2 计算板光密度

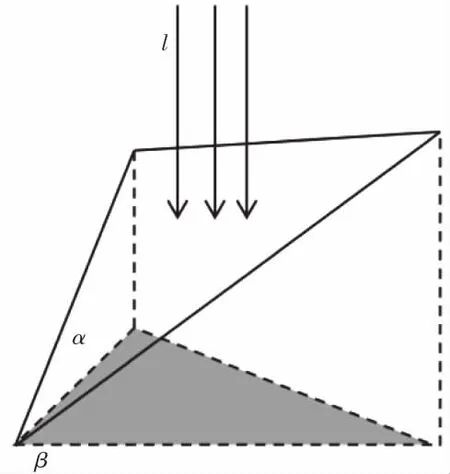
图7 光强占比投影Fig.7 Light intensity ratio projection
(12)
则平面β面积为:
(13)
可以得出光强占比为:
(14)
3 模型在最优化中的应用
对于主索点移动优化模型,首先确定约束条件:
1)促动器结构仅能朝球心径向方向移动;
2)相邻主索点距离变化不超过0.07%;
3)主索点最大位移不超过0.6 m。
以所有主索点离理想抛物面距离之和最小为目标函数,基于软约束用搜索法进行目标优化,得到搜索优化工作抛物面的逆向搜索模型。
首先需要确定当主动反射面调整时主索点的可移动方向。
理想抛物面模型建立中证明了基准球面上的主索点到球心距离相同即处在径向上,因此用主索点坐标与球心相连得到的向量作为径向向量。再将促动机的上下端点坐标转换为向量形式表示促动机的伸缩方向,将径向单位向量与促动机朝向方向的单位向量进行比较。
图8中每一个圆圈表示促动机伸缩方向的单位向量端点,每一个五角星表示沿径向方向的单位向量端点。

图8 促动机向量及径向向量Fig.8 Actuator vector and radial vector
图9中叉、点、线分别表示x、y、z方向上偏离值。根据图8中圆圈与五角星绝大部分完全重合小部分贴合和图9中只在极少数点存在小于0.1 mm的位移偏离,我们可以一般地认为所有主索点只会从当前位置沿着径向移动。接下来将球心坐标减去各主索点坐标得到径向向量(Δxi,Δyi,Δzi),其中i表示不同主索点,则主索点在三个方向上的位移为:

图9 促动机伸缩方向与径向方向偏离值Fig.9 Deviation value between telescopic direction andradial direction of actuator
(15)
其中h为每一次移动的步长。不考虑相邻点距离变化小于0.07%,仅考虑主索点位移量小于0.6 m,得到一个正向寻优的极限抛物面,对位置不满足相邻点距离变化小于0.07%主索点进行反向寻优来缩小与相邻点之间的距离,得到最终的工作抛物面主索点位置。
逆向寻优过程如图10。

图10 逆向寻优流程图Fig.10 Reverse optimization flow chart
4 结束语
本文基于光学和反射板空间几何关系建立了理想反射面的计算模型和约束条件下的多目标优化反射板动作策略模型,同时利用蒙特卡洛法计算馈源舱接收比评估模型。该模型可移植性高,可以灵活应用到主动反射射电望远镜的反射策略场景。
进一步研究中,可尝试使用人工神经网络代替搜索法实现多目标优化过程,提高目标优化的拓展性。此外,设计更为简便的馈源舱的接收比评估模型,有效减少蒙特卡洛法带来的巨大计算量。
猜你喜欢
贵州科学(2022年4期)2022-09-05
河西学院学报(2022年2期)2022-07-13
哈尔滨轴承(2022年1期)2022-05-23
航天器环境工程(2022年1期)2022-03-11
军事文摘(2021年16期)2021-11-05
天文研究与技术(2021年3期)2021-07-15
河北理科教学研究(2021年4期)2021-04-19
科技传播(2019年22期)2020-01-14
科教新报(2019年16期)2019-09-10
科学导报(2019年24期)2019-09-03