
基于能量变化的水下航行器声引信被动检测
2022-03-16 04:12:56李荣融王明洲
水下无人系统学报 2022年1期
张 俊, 李荣融, 朱 健, 王明洲
基于能量变化的水下航行器声引信被动检测
张 俊, 李荣融, 朱 健, 王明洲
(中国船舶集团有限公司 第705研究所, 陕西 西安, 710077)
针对水下航行器对运动目标拦截末程声引信实时有效检测问题, 利用水下航行器所接收目标的辐射噪声能量快速变化特性, 提出了一种水下航行器声引信被动检测方法。通过快速傅里叶变换对接收的目标辐射噪声进行转换, 在频域实现频带内能量计算, 得到信号能量变化曲线, 利用设计的滤波器对能量曲线进行平滑处理, 并计算曲线斜率。仿真分析与实测数据处理结果表明, 信号能量曲线斜率能有效地反映水下航行器与目标交汇过程中声引信接收噪声的能量变化特点, 可以作为交汇最短距离和引信输出最佳时刻的重要判据。
水下航行器; 声引信; 被动检测; 辐射噪声; 斜率
0 引言
声引信作为水下航行器在拦截目标末程完成运动目标探测、判定最小交汇距离、输出引爆信号的有效近场声感知手段, 越来越受到国内外学者的重视, 具有重要的工程应用价值[1-5]。对于鱼雷等来袭目标, 在一定航行速度下其辐射噪声谱级普遍大于100 dB[1]。理论分析和试验表明, 当接收到的目标辐射噪声能量远高于自噪声和环境噪声时, 通过对运动目标辐射噪声的被动检测实现目标感知和引信判定的方法是有效的[6-9]。
时域能量检测是一种基本、传统的声引信被动检测方法[10-11], 其基本检测过程为: 对目标辐射噪声进行声电转换、滤波放大、能量平方和累积后, 输出值与设定的门限进行比较, 最后输出判决结果, 过程如图1所示。

图1 时域能量检测基本过程
快速傅里叶变换(fast Fourier transform, FFT)是目前能量检测的常用方法之一, 该方法将信号转换到频域, 然后对频带内信号进行求模平方和累加, 最后将计算所得的能量值与门限进行比较, 若超过判决门限, 则判断检测为有效。
由于水下航行器拦截运动目标是一个速度高、时间短, 空间相对方位变化快的过程, 水下航行器声引信接收到的目标辐射噪声具有明显的空间通过特性, 噪声能量随着水下航行器与目标间相对距离的变化而快速起伏。基于此, 文中对声引信接收的目标辐射噪声能量曲线的斜率进行计算和分析, 将斜率特征作为声引信被动检测的重要判据, 为交汇最短距离和引信输出最佳时刻的判定提供一种有效的方法。
1 声引信被动检测模型
1.1 被动声引信信号变化过程

水下航行器位置坐标为

二者距离为

根据三角正弦定理

得到


根据远场条件下球面波传播规律, 目标辐射噪声强度与距离的平方成比例, 水下航行器声引信接收到的噪声级为


1.2 斜率检测器
斜率检测是对信号能量变化的检测, 本质上仍然为能量检测。水声信号二元能量检测器如下式

在工程实践中, 构造检测准则为




1.3 具体实现过程
基于目标辐射噪声能量曲线斜率的声引信被动检测包含信号接收、滤波放大处理、数模转换和后续信号处理过程; 信号处理过程包括信号能量计算、数据平滑、斜率计算和判定。图3为基本检测过程。

图3 基于斜率特征的被动检测基本过程
1.3.1 基于FFT的噪声能量计算


将1个检测周期内的信号分为一定长度的数据帧, 对每一帧数据进行FFT后计算频带内能量。各帧的能量构成如下能量序列

1.3.2 数据平滑滤波

FIR滤波器是一种具有稳定输出的线性相位滤波器, 其基本结构是具有多个分节的延时线, 对每1节的输出进行加权累加得到滤波器的总输出。也就是说, 通过设计FIR滤波器系数对当前及之前各帧的被动噪声能量的加权累加, 可以得到当前时刻的输出。滤波器的输出与输入相比, 各点幅度有所改变, 且具有固定的时延。
利用FIR滤波器对被动噪声能量数据进行平滑滤波的计算过程为



2 仿真分析

图4 交汇夹角35°时的仿真结果

图5 交汇夹角52°时的仿真结果

图6 交汇夹角69°时的仿真结果
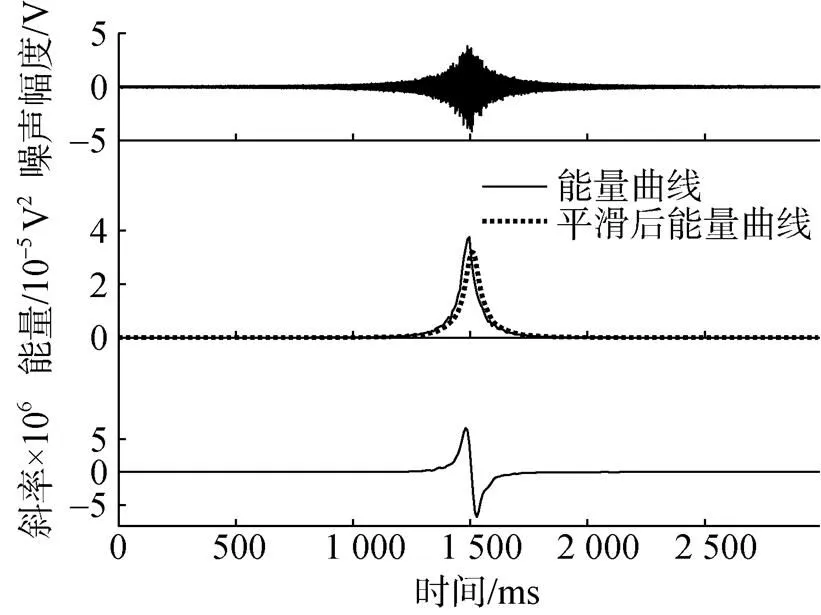
图7 交汇夹角86°时的仿真结果

图8 交汇夹角101°时的仿真结果

图9 交汇夹角116°时的仿真结果

表1 不同交汇态势条件下最大斜率
由上述图所示结果可见, 在6种不同夹角的交汇态势下, 平滑滤波器对航行器声引信接收的目标辐射噪声能量曲线均起到较好的平滑效果, 保留了能量曲线的变化特点, 说明所设计的平滑滤波器参数是合理的。
在各态势下, 目标辐射噪声通过特性明显,水下航行器与运动目标交汇时刻, 在时域上能看到明显的噪声信号, 与无目标时刻有明显变化, 能量曲线斜率有显著提高。不同夹角态势下最大斜率值均达到了106量级, 相对于无噪声信号时刻的斜率均有较大的检测余量。
3 试验结果与分析

图10 通道1数据斜率计算结果
Fig.10 Data slope of channel 1

图11 通道2数据斜率计算结果

图12 通道3数据斜率计算结果
表2 各通道数据最大斜率值

Table 3 Maximum slope value of each channel data

图13 通道4数据斜率计算结果

图14 通道5数据斜率计算结果
图15 通道6数据斜率计算结果
Fig.15 Data slope of channel 6
由各通道信号能量曲线斜率的计算结果可以看出, 由于通道1和通道6换能器接收波束在水下航行器与目标的快速交汇过程中扫过目标, 时域上可看到明显的目标辐射噪声波形, 交汇时刻能量快速上升, 能量曲线斜率相应地明显变大。随着交汇后水下航行器与目标空间距离的增大, 通道1和通道6的辐射噪声又快速下降, 斜率值呈现负值并且绝对值与之前的正斜率相当。与通道1和通道6形成明显对比的是通道3和通道4, 由于对应换能器波束没有指向目标, 其接收到的信号以环境噪声为主, 信号幅值均匀, 没有明显的起伏, 故其能量曲线不具有能量突变的特点, 整个斜率值接近0且比较稳定。通道2和通道5换能器波束没有扫过目标, 所以也没有收到目标辐射噪声, 干扰的存在使其信号能量曲线不如通道3和通道4平缓, 但经平滑滤波器的滤波后其能量曲线相对平缓, 相应的斜率值与有目标背景噪声的通道1和通道6相比小得多。可见在航行体与目标高速交汇的情况下, 能量较低或时间尺度较小的干扰不会对目标的检测造成影响。
4 结束语
文中针对水下航行器声引信被动实时检测问题进行了研究, 利用拦截过程中水下航行器与目标空间方位变化快、声引信接收到的目标辐射噪声强度随距离快速上升和下降的特点, 给出了基于能量曲线斜率的被动检测具体实现方法。利用FFT分析实现噪声能量的计算, 讨论了用于能量平滑的FIR参数选取思路, 并进行了仿真分析和试验数据验证分析。通过仿真分析和试验数据分析, 表明了所述被动检测方法的有效性。
文中基于简单的提前角拦截态势对所述的检测方法进行分析和仿真, 后续可针对复杂导引方法下的末程拦截弹道进行检测方法的性能分析; 同时, 对于平滑滤波器参数的选择也可开展理论分析研究, 建立科学有效的参数选择模型, 为实际应用提供理论依据。
[1] 陈川.基于水下小平台的被动声探测定位技术研究[D].哈尔滨: 哈尔滨工程大学, 2013.
[2] 张士忠.声引信中线谱检测的相关方法和时频分析[D].哈尔滨: 哈尔滨工程大学, 2007.
[3] 赵国库.引信水中超声波探测技术研究[D].南京: 南京理工大学, 2005.
[4] 谭菊琴.引信水下目标探测超声波发射与控制技术研究[D].南京: 南京理工大学, 2015.
[5] 崔户山, 崔贵平, 王明洲.基于短时傅立叶变化反鱼雷鱼雷主动声引信浅水检测方法[J].舰船科学技术, 2012, 34 (6): 87-90.
Cui Hu-shan, Cui Gui-ping, Wang Ming-zhou.Detection Methed of Anti-torpedo Torpedo’s Active Acoustic Fuze in Shallow Water Based on STFT[J].Ship Science and Technology, 2012, 34(6): 87-90.
[6] 尤立克.水声原理[M].哈尔滨: 哈尔滨船舶工程学院出版社, 1990: 274.
[7] 陈子铨, 何文翔.干扰背景下的被动声引信处理方法[J].声学技术, 2018, 37(4): 58-59.
Chen Zi-quan, He Wen-xiang, The Treatment of Passive Acoustic Fuse in Presence of Interference[J].Technical Acoustics, 2018, 37(4): 58-59.
[8] 孙钟阜, 庞博.主被动声引信联合使用策略研究[J].声学技术, 2017, 36(6): 545-548.
Sun Zhong-fu, Pang Bo.Research on Joint Use Strategy of Active/Passive Acoustic Fuze[J].Technical Acoustics, 2017, 36(6): 545-548.
[9] 刘科满, 相敬林, 侯铁双, 等.基于目标过零特性与能量特性的声引信检测方法[J].兵工学报, 2008, 29(9): 1044-1048.
Liu Ke-man, Xiang Jing-lin, Hou Tie-shuang, et al.A Joint Method of Zero-crossing Detection and Energy Detection[J].Acta ArmamentarII, 2008, 29(9): 1044-1048.
[10] 孙钟阜.基于目标能量特性的被动声引信[J].声学技术, 2012, 31(6): 574-577.
Sun Zhong-fu.Passive Acoustic Fuse Based on Energy Feature of Target[J].Technical Acoustics, 2012, 31(6): 574-577.
[11] 姚晓莹.水下目标信号的能量熵检测与倒谱特征分析技术[D].哈尔滨: 哈尔滨工程大学, 2014.
[12] 胡广书.数字信号处理-理论、算法与实现[M].北京: 清华大学出版社, 2003: 122.
Passive Detection of Undersea Vehicle Acoustic Fuze Based on Energy Variation
ZHANG Jun, LI Rong-rong, ZHU Jian, WANG Ming-zhou
(The 705 Research Institute, China State Shipbuilding Corporation Limited, Xi’an 710077, China)
Aiming at the problem of real-time and effective detection of an acoustic fuze at the end of the intersection between an undersea vehicle and a moving target, a passive detection of acoustic fuze for undersea vehicles was presented, which used the fast-changing energy characteristics of the
noise radiated by target.The noise received by the undersea vehicle acoustic fuze was converted using the fast Fourier transform(FFT), and the energy of the noise in the working frequency band was calculated to obtain the signal energy changing curve.Finally, the energy curve was smoothed by the designed filter, and the slope of the curve was calculated.The results of the simulation and processing of the measured data showed that the slope of the signal energy curve can effectively reflect the energy change characteristics of the noise received by the acoustic fuze in the intersection process between the undersea vehicle and moving target, and the slope of the signal energy curve can be used as an important criterion for the shortest distance between the undersea vehicle and moving target and the best time for acoustic fuze to give out an action signal.
undersea vehicle; acoustic fuze; passive detection; radiated noise; slop
张俊, 李荣融, 朱健, 等.基于能量变化的水下航行器声引信被动检测[J].水下无人系统学报, 2022, 30(1): 102-108.
TJ630.32; TB566
A
2096-3920(2022)01-0102-07
10.11993/j.issn.2096-3920.2022.01.013
2021-05-26;
2021-09-29.
张 俊(1984-), 男,在读博士, 高级工程师, 主要研究方向为水中兵器仿真、水声信号检测.
(责任编辑: 杨力军)
猜你喜欢
天津外国语大学学报(2021年1期)2021-03-29 03:07:20
少儿美术(快乐历史地理)(2020年4期)2020-08-24 07:21:36
物理之友(2020年12期)2020-07-16 05:39:16
中学生数理化(高中版.高考数学)(2020年3期)2020-05-25 06:53:14
疯狂英语·新策略(2019年9期)2019-10-17 01:51:34
趣味(语文)(2019年5期)2019-09-02 01:52:44
中学生数理化(高中版.高考数学)(2018年12期)2019-01-17 01:31:52
福建中学数学(2016年7期)2016-12-03 07:10:28
光学精密工程(2016年1期)2016-11-07 09:01:53
电测与仪表(2016年6期)2016-04-11 12:05:54
