
永磁同步电机分段变交轴电压弱磁控制方法
2022-03-16 05:57:32刘维亭魏海峰李垣江
水下无人系统学报 2022年1期
梁 裕, 刘维亭, 魏海峰, 张 懿, 李垣江
永磁同步电机分段变交轴电压弱磁控制方法
梁 裕, 刘维亭, 魏海峰, 张 懿, 李垣江
(江苏科技大学 电子信息学院, 江苏 镇江, 212003)
水面生命探测机器人等救援探测设备在运行状态下, 其供电电压会发生下降, 为提高其机动性和稳定性, 可进入弱磁扩速状态。在供电电压恒定的情况下, 通过变交轴电压法的单电流调节器控制, 可有效避免双电流调节器造成的控制系统复杂化, 以及系统失控和控制效率过低等问题, 实现结构简单、控制安全和方便的效果。文中改进了弱磁控制系统的反馈环节和变交轴电压给定方式, 增加了限幅处理, 提出一种交轴电压给定方式, 将电机弱磁过程划分为恒功率弱磁和深度弱磁2个部分, 分段实时调节交轴电压, 使电机在深度弱磁状态下鲁棒性更强, 提高电机高转速下的稳定性。通过Simulink仿真及实验数据分析, 证实了该控制方法的可靠性。
永磁同步电机; 深度弱磁; 单电流调节器; 电压反馈; 分段变交轴电压
0 引言
永磁同步电机(permanent magnet synchronous motor, PMSM), 特别是稀土PMSM以其结构简单、运行可靠、效率高和功率密度大等优点广泛应用于电动汽车[1-2]、航空航天[3]、风力发电以及水面设备, 如快速机动的环境监测领域、军事侦察等领域[4-6]。PMSM的转速在稳定运行时与电源频率保持恒定关系, 并随着频率的改变而调节转速, 其具有高效、小振动、低噪声和高转矩密度的特点。PMSM可直接驱动水面航行器, 如探测器、水面机器人, 同时也可直接驱动对转螺旋桨推进系统, 在鱼雷和无人水下航行器等水下电力推进领域有广泛的应用前景[7], 因此PMSM弱磁控制方法有着很重要的研究意义。
为了得到更宽的调速范围, 常见的弱磁扩速方法包括: 恒转矩弱磁控制、查表法、超前角弱磁控制、最大输出功率弱磁控制、引入电流压缩系数的弱磁控制、定交轴电压单电流调节器(single current regulator-fixed Q-axis voltage, SCR-FQV)弱磁控制以及变交轴电压单电流调节器(single current regulator-variable Q-axis voltage, SCR-VQV)弱磁控制等。文献[8]采用恒转矩前馈结合电压反馈的电流补偿弱磁控制策略, 该方法可以获得良好的转矩和转速动态性能, 但是调速范围较窄。文献[9]采用查表法进行弱磁控制, 该方法结构简单, 对参数不敏感, 但是需要大量测试来制表。文献[10]采用超前角的弱磁控制方法, 该方法可实现恒转矩区到弱磁区的电流稳定切换, 但是在弱磁区输出转矩较弱, 且电流调节器易饱和, 故而在此基础上提出了单电流调节器控制弱磁的方式, 该方法可以防止电机在进入弱磁或者深度弱磁过程中因电流调节器耦合严重而导致的电流调节器饱和, 使得PMSM失控。文献[11]~文献[15]分别采用了SCR-FQV和SCR-VQV这2种方式, 解决了弱磁时2个电流调节器解耦的问题: 通过对定交轴电压的弱磁控制, 使得电机的可调整范围较小; 通过对变交轴电压的弱磁控制, 能够保证转速在弱磁过程中的稳定变化。但在深度弱磁中, 仍采用同样的交轴电压给定方式会造成系统和转速不稳定, 容易造成失控。因此, 为防止在深度弱磁状态下失控, 完善弱磁控制系统, 文中改进了变交轴电压的给定方式, 在恒功率弱磁和深度弱磁2个状态中, 采用不同交轴电压给定的控制方式。通过实验与仿真验证了文中方法的优越性和可靠性。
1 PMSM数学模型
以内置式PMSM为研究对象, 在直角坐标系下的数学模型为


通过坐标变换, 在-坐标系下的数学模型为


由式(2)可知,和是互相耦合的, 因此单电流调节器能够减少电流的解耦过程, 控制简单, 优势十分明显。
运行在-坐标系下, 电流和电压需要满足电流圆和电压圆, 具体关系为
式中:max是电机定子电流空间矢量最大值;max是电机定子电压空间矢量最大值。转速升到基速以上进行弱磁时, 可以忽略定子电阻, 因此, 电压限制公式(3)结合式(2)可以写为

2 PMSM弱磁控制
PMSM进入弱磁状态会使得转速增加, 转矩下降。因此弱磁控制可用于需要有快速机动性能及带载的电机控制模式下。该方法可用于PMSM供电电压充足和不足的情况。以水面生命探测设备为例, 在供电电压充足时, 通过弱磁系统可以达到转速极限的运行状态, 快速机动辅助人员搜救; 在供电电压不足时, 通过弱磁系统可以让该设备保持基速运行, 保证设备的正常使用。
2.1 弱磁控制曲线分析
在内置式PMSM转速控制中, 系统转速控制区域可分为恒转矩区、恒功率弱磁区和深度弱磁区。文中分别采用以下控制方式: 最大转矩电流比(maximum torque per ampere, MTPA)控制、恒功率弱磁控制以及最大转矩电压比(maximum torque per voltage, MTPV)控制。控制曲线如图1所示。

图1 弱磁控制曲线
恒转矩区: 在电机启动后, 在红色的恒转矩1的曲线运行, 该曲线和电流极限圆以及MTPA曲线的交点为当前输入电流为时的最大输出转矩点, 因此电机在该区域的运行曲线为沿着MTPA曲线从0点到点, 为最优工作区域。
恒功率弱磁区: 图1中阴影部分为恒功率弱磁区。当运行到点时, 此刻电压已经受到了限制, 为了使转速继续增大, 则需要在电流保证最大值的条件下增加励磁, 继而增大电压, 结合式(2)可知


深度弱磁区: 在曲线边缘, 此刻逆变器可以输出的电流和电压已经达到了最大值。还可以通过减小来减小转矩电流分量, 继续增加转速。由于电机种类和参数不同, 进入深度弱磁区域, 定义深度弱磁率为
2.2 SCR-VQV控制系统
双电流调节器作为传统的弱磁控制方法之一,在低速阶段,轴电压未到最大值, 可以进行双电流调节器控制; 在高速阶段,轴电压被限制, 会导致、轴电流耦合严重。
通过式(2), 可以得到轴电流和轴电流的关系式
由上式可知, 得到轴电流, 就可以计算出轴电流, 因此在弱磁阶段, 只需轴单电流调节器, 就可以消除高速阶段电流的耦合, 从而使控制系统得到简化。

为了使弱磁状态下的转速和转矩都保持在设备最优状态, 提出了变交轴电压的弱磁控制方法, 防止在弱磁状态下转矩输出过小。
综上, 文中设计了一种改进型分段式SCR- VQV弱磁控制方法。改进型的控制系统见图2。

图2 SCR-VQV弱磁控制系统图



采用SCR-VQV控制方式时, 由于弱磁控制条件下需限定轴电压, 需满足式(2)中Li+ψ≥0, 因此轴电压需要进行限幅处理, 如图2所示, 以保证>0。将得到的、轴电压传输到控制系统中, 通过磁场导向控制方式控制电机运行。
3 系统交轴电压给定方式
传统的变交轴电压给定方式需要建立给定轴电压和电流之间的关系, 在深度弱磁区, 会出现给定轴电压不准确, 致使系统不稳定, 会有一定几率造成弱磁失控的现象。因此, 文中提出了一种新的弱磁轴电压给定方式。将弱磁区分为恒功率弱磁区和深度弱磁区, 分段采用不同的轴电压给定方式进行控制。
通过检测轴电流判定当前所处的区域: 恒转矩区、恒功率弱磁区、深度弱磁区。引入线性变化的交轴电压,是线性变化的值, 由式(7)可进一步得到、轴电流的关系, 即
式中:base为线性变化的轴电压值。文中对于base的计算采用以下给定方式:轴电流小于(B)时, 电压给定值为

当轴电流大于(B)后, 处于深度弱磁状态。在深度弱磁状态下,轴电流会减小, 若轴电流采集不准确, 会导致式(10)中值变化过大, 致使给定的base不稳定, 造成深度弱磁失控的现象。为避免该情况, 应适当将base值的增长放缓, 防止轴电流检测有误造成系统的不稳定。因此, 在深度弱磁区,base的给定值为

式中, 参数的选择是根据直流母线电压波动或者定子电阻引起的电压裕度确定的, 取值范围为0.7~1, 且需要根据转速升高的速度进行调节, 可通过试凑法提高数值选取的精确性; 参数则根据与转速提升速度的线性关系进行设定, 并在其取值范围内进行选择。
该方法可以提高PMSM的工作效率, 且保证在进入深度弱磁后, 系统仍可较为稳定的运行。
4 实验验证与分析
为验证该方法的有效性和可靠性, 以PMSM为研究对象, 且保证供电电压恒定的前提下, 使用上文所述的弱磁控制系统图和分段SCR-VQV控制方式, 通过仿真、上位机控制及具体实验验证, 分别对电机启动过程、电流波形、电机效率、电机转速和转矩进行对比和分析。
4.1 实验设备及条件
实验采用内置式PMSM, 基于STM32F051单片机进行程序设计。PMSM的参数如表1所示。
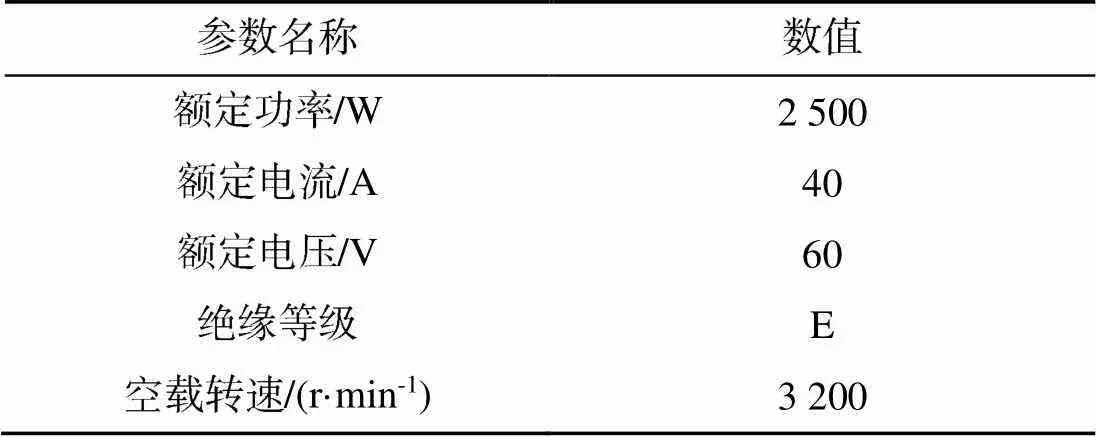
表1 实验用PMSM参数
为更好地监测电机正常运行及弱磁状态下的电压、电流和转矩等信息, 采用了图3所示的数据采集设备, 实时监测数据变化, 并进行对比分析。
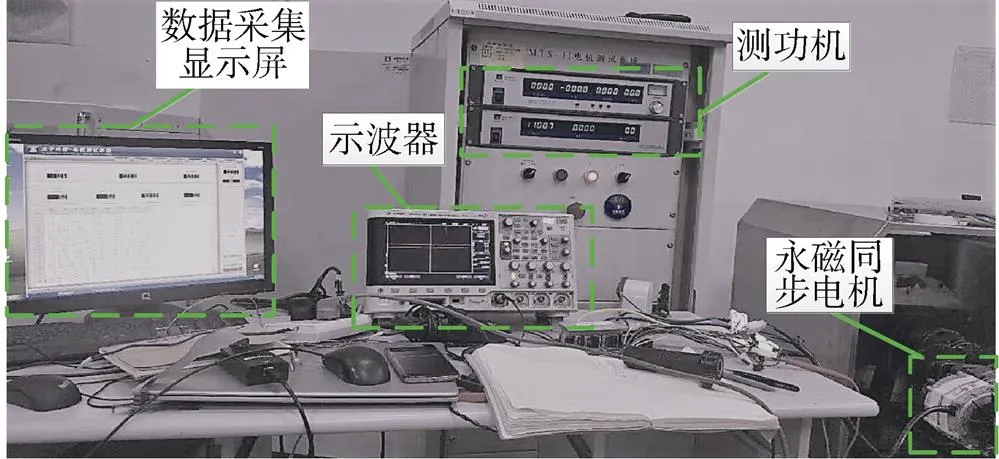
图3 数据采集设备
4.2 分段变交轴电压给定曲线
通过上文所述的交轴电压给定方式, 结合电机运行曲线和电机稳定运行的效果, 采用了图4和图5的电压给定方式。在通过上位机进行调节后, 在转速达到4 000 r/min后进入深度弱磁状态, 该状态下, 通过检测转把电压, 计算得到当前的值后代入式(11)。通过不断调整公式中的系数, 得到在恒功率弱磁区的给定轴电压曲线, 如图4所示。在进入深度弱磁后, 调整参数得到深度弱磁区的给定轴电压曲线, 如图5所示。

图4 恒功率弱磁区q轴电压给定曲线
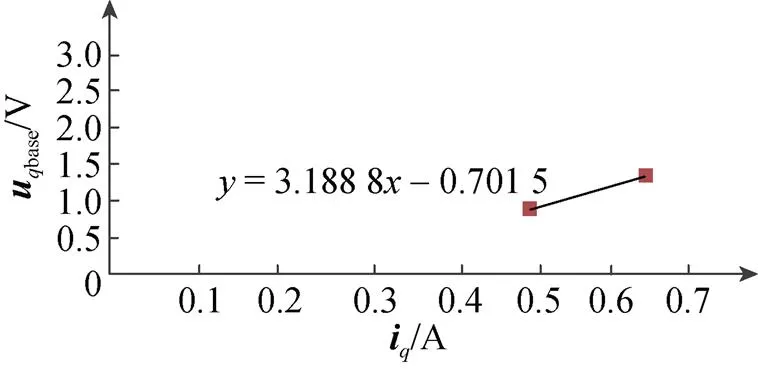
图5 深度弱磁区q轴电压给定曲线
4.3 PMSM启动实验
为防止给定交轴电压不准确造成电机启动失败或起步不稳定的情况, 在进入恒功率弱磁区前, 以A相为例, 检测电机起步时相电流的波形, 如图6所示。
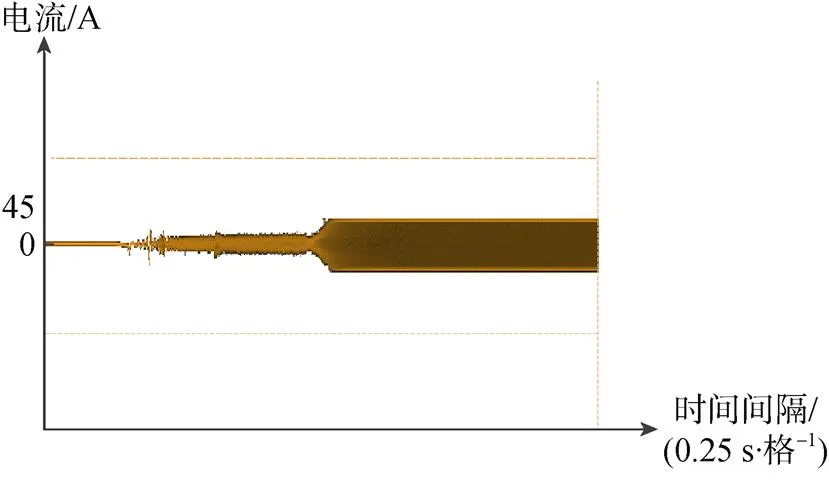
图6 A相线起步电流波形
由图可知, 电机起步抖动较小, 起步比较稳定, 在进入加速过程中, 电流波形较为顺滑, 实验证明该方法对电机的起步没有影响。
4.4 PMSM加载实验
为了验证该方法对电机输出转矩的影响情况, 采集A相电流和电压在带载情况下的的变化, 实验结果见图7。

通过实验证实, 如图7所示, 在带载条件下, 电机电流稳定。计算产生的A相电压较为稳定。
在带载条件下, 为了更好地观察、轴电流的稳定性, 通过仿真进行了检测, 其仿真波形见图8和图9。
通过仿真可以发现,轴电流在0.5 s后进入弱磁过程, 曲线平滑, 可以证明该变交轴电压的控制方式对电流的影响较小, 带载条件下具有较好的稳定性。
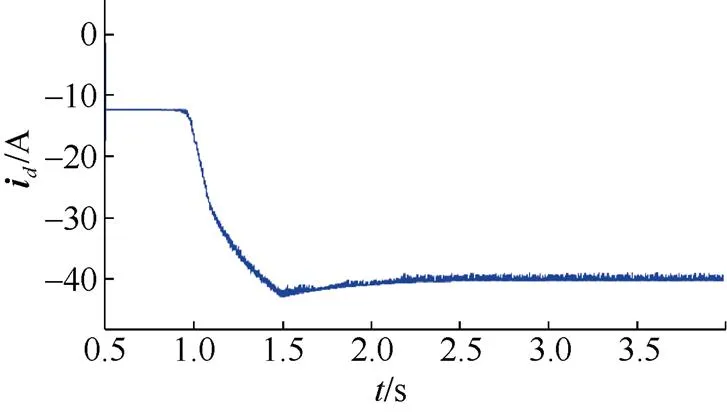
图8 带载时d轴电流波形
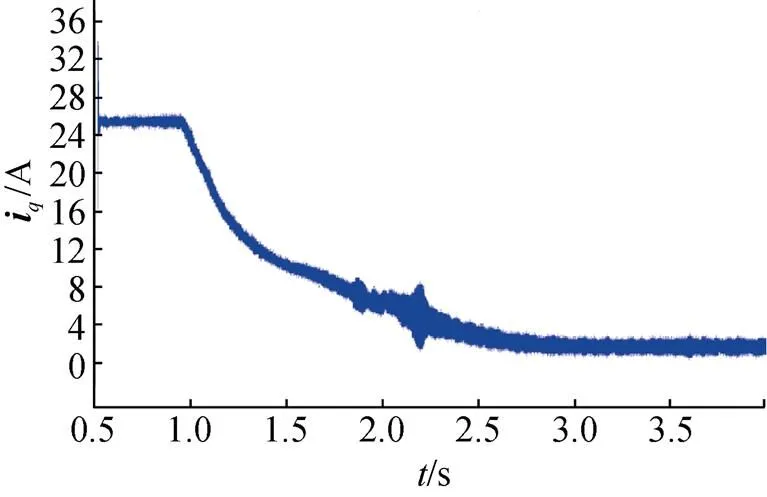
图9 带载时q轴电流波形
4.5 PMSM弱磁过程性能实验
为了验证在弱磁和非弱磁情况下采用该方法对电机的影响, 通过不断增大负载, 从整个过程进行设备检测分析, 观察系统性能。图10是未进行弱磁情况下系统的运行情况。
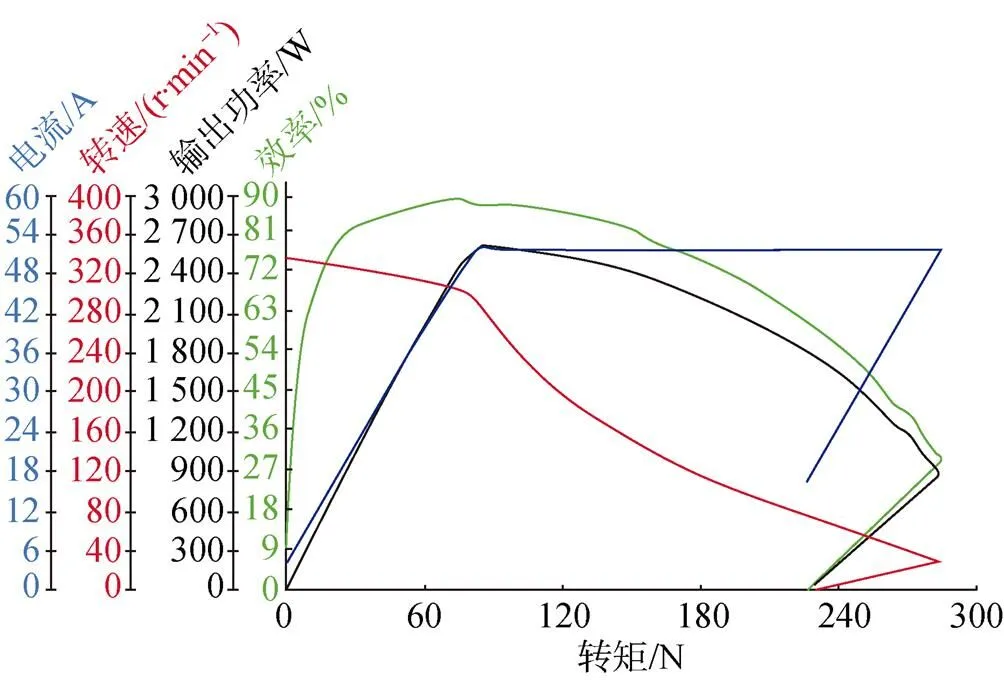
图10 无弱磁情况下系统运行曲线
电机采用1:10差速比。通过图10可知, 无弱磁情况下, 电机空载转速可达3 300 r/min左右, 由于该系统设计了电流环和转速环, 在负载增大到90 N前, 转速可以稳定在一个相对平稳的速度, 到达90 N后, 电流可以稳定在50 A左右。无弱磁条件下效率最高可达到84%左右。
有弱磁情况下系统运行情况如图11所示。由图可知, 有弱磁情况下, 空载转速可达5 400 r/min, 但转速提高, 最大转矩就会变小, 因此在负载增大到40 N时, 转速开始下降。在有弱磁情况下, 电流依然可以稳定在50 A左右, 效率可以达到81%。
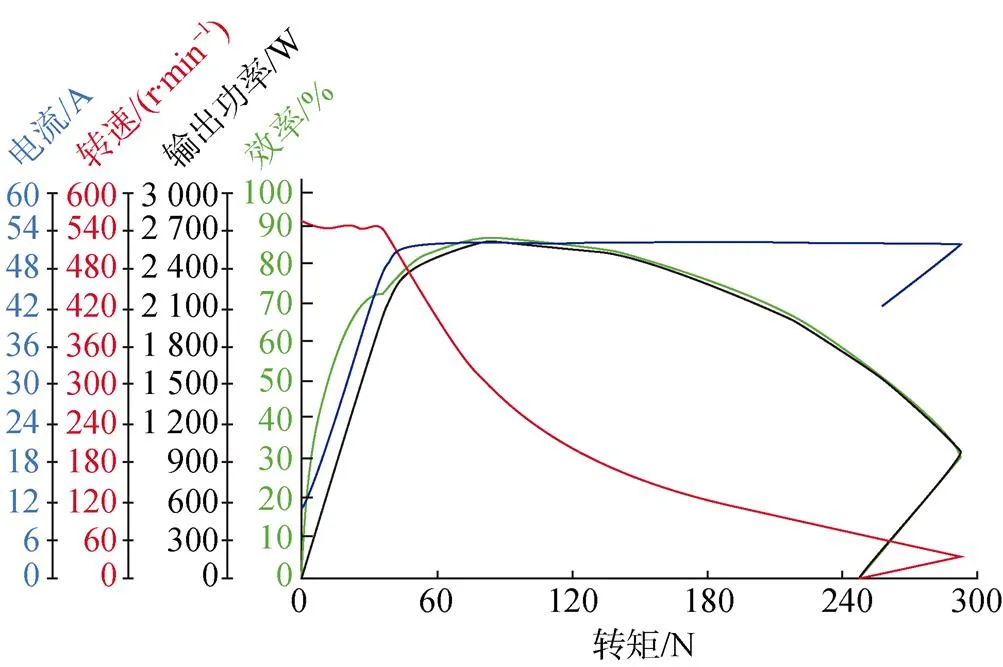
图11 有弱磁情况下系统运行曲线
通过上述有无弱磁2种情况对比发现, 在转速提高后, 虽然有弱磁状态下最大转矩稳定的时间较短, 但是电机的输出效率并没有受到影响, 且电机的电流和输出功率等数值也变化较小。
综上所述, 文中采用的分段SCR-VQV弱磁控制方式, 可以让电机转速提升更高, 且系统稳定, 电机运行效率较高。在供电电压恒定的情况下, 可以为水面救援机器人提供快速的机动能力; 在供电电压下降的情况下, 进入深度弱磁状态, 也可以维持恒定转速, 保证人员救援的顺利进行。
5 结束语
针对弱磁控制问题, 文中提出了一种分段SCR-VQV弱磁控制方法, 使得电机在深度弱磁状态下仍可以保证系统的稳定运行。通过数据和理论分析, 验证了该方法的可行性。该方法能够大大提高电机运行速度, 同时提高系统的可靠性和安全性。该方法适用于水面小功率低速运行设备, 对于提高水面生命探测机器人的机动能力, 以及保证落水人员安全也具有一定的实际意义。下一步工作是进一步细化变交轴电压给定关系, 以防止系统失控。
[1] 宋腾飞, 刘慧娟, 张振洋.车用永磁同步电机拓扑结构优化与实验研究[J].电机与控制学报, 2019, 23(6): 44-53.
Song Teng-fei, Liu Hui-juan, Zhang Zhen-yang.Topological Structure Optimization and Experimental Research of Permanent Magnet Synchronous Motors for Vehicles[J].Journal of Electrical Machines and Control, 2019, 23(6): 44-53.
[2] 张丽, 朱孝勇, 左月飞.电动汽车用转子永磁型无刷电机与控制系统容错技术综述[J].中国电机工程学报, 2019, 39(6): 1792-1802, 1875.
Zhang Li, Zhu Xiao-yong, Zuo Yue-fei.Summary of Fault-tolerant Technology of Rotor Permanent Magnet Brushless Motor and Control System for Electric Vehicles[J].Proceedings of the Chinese Society of Electrical Engineering, 2019, 39(6): 1792-1802, 1875.
[3] 孔令海.航空用高速永磁发电机的损耗分析[D].沈阳:沈阳工业大学, 2018.
[4] 张彦兵, 谢文龙, 王伟.永磁直驱风机直流并网的启停控制[J].电力系统保护与控制, 2017, 45(13): 143-148.
Zhang Yan-bing, Xie Wen-long, Wang Wei.Start-stop Control of Permanent Magnet Direct-drive Wind Turbine DC Grid-connected[J].Power System Protection and Control, 2017, 45(13): 143-148.
[5] 朱谷雨, 王致杰, 邹毅军.永磁直驱风机的小步长硬件在环仿真研究[J].电力系统保护与控制, 2018, 46(23): 111-117.
Zhu Gu-yu, Wang Zhi-jie, Zou Yi-jun.Small-step Hardware-in-the-Loop Simulation Study of Permanent Magnet Direct-Drive Wind Turbines[J].Power System Protection and Control, 2018, 46(23): 111-117.
[6] 邓小文, 潘巧波, 高庆水.永磁直驱机组叶轮质量不平衡故障建模及仿真研究[J].电力系统保护与控制, 2018, 46(4): 35-40.
Deng Xiao-wen, Pan Qiao-bo, Gao Qing-shui.Research on Modeling and Simulation of Impeller Mass Imbalance Fault of Permanent Magnet Direct Drive Unit[J].Power System Protection and Control, 2018, 46(4): 35-40.
[7] 徐海珠, 谢顺依, 崔维开.基于脉振高频电压注入的对转永磁同步电机无位置传感器控制[J].鱼雷技术, 2012, 20(4): 290-294.
Xu Hai-zhu, Xie Shun-yi, Cui Wei-kai.Position Sensorless Control of a Counter-rotating Permanent Magnet Synchronous Motor Based on Pulsed High Frequency Voltage Injection[J].Torpedo Technology, 2012, 20(4): 290-294.
[8] 赵其进, 廖自力, 苗成林.电传动车辆轮毂电机恒转矩弱磁控制策略[J].浙江大学学报(工学版), 2021, 55(1): 195-202.
Zhao Qi-jin, Liao Zi-li, Miao Cheng-lin.Constant Torque Field Weakening Control Strategy of Electric Drive Vehicle in-wheel Motor[J].Journal of Zhejiang University (Engineering Science Edition), 2021, 55(1): 195-202.
[9] 杨根胜.一种改进的感应电机查表法弱磁控制策略[J].电机与控制应用, 2015, 42(2): 26-30.
Yang Gen-sheng.An Improved Field-weakening Control Strategy of Induction Motor by Look-up Table[J].Motors and Control Applications, 2015, 42(2): 26-30.
[10] 刘雨石, 乔鸣忠, 朱鹏.基于SVPWM过调制的超前角弱磁控制永磁同步电机的策略研究[J].电机与控制应用, 2018, 45(2): 28-33.
Liu Yu-shi, Qiao Ming-zhong, Zhu Peng.Research on the Leading Angle Field Weakening Control Permanent Magnet Synchronous Motor Strategy Based on SVPWM Overmodulation[J].Electric Machines and Control Applications, 2018, 45(2): 28-33.
[11] Zhu L, Xue S, Wen X, et al, A New Deep Field-weakening Strategy of IPM Machines Based on Single Current Regulator and Voltage Angle Control[C]//2010 IEEE Energy Conversion Congress and Exposition.Atlanta, GA, USA: IEEE, 2010: 12-16.
[12] Chi S, Xu L, Zhang Z.Efficiency-Optimized Flux- Weakening Control of PMSM Incorporating Speed Regulation[C]//2007 IEEE Power Electronics Specialists Conference.Orlando, FL, USA: IEEE, 2007: 17-21.
[13] Fang X, Hu T, Lin F, et al.A Novel Flux-weakening Control Method Based on Single Current Regulator for Permanent Magnet Synchronous Motor[C]//2014 International Power Electronics Conference(IPEC-Hiroshima 2014-ECCE ASIA).Hiroshima, Japan: IEEE, 2014: 18-21.
[14] Zhang Z, Wang C, Zhou M, et al.Flux-Weakening in PMSM Drives: Analysis of Voltage Angle Control and the Single Current Controller Design[J].Journal of Emerging and Selected Topics in Power Electronics, 2019: 437-445.
[15] Liu W, Liang H, Wang C.Study on Flux-weakening Control Based on Single Current Regulator for PMSM[C]//2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific).Beijing: IEEE, 2014.
Field Weakening Control Method of Subsection Variable Quadrature Axis Voltage for Permanent Magnet Synchronous Motor
LIANG Yu, LIU Wei-ting, WEI Hai-feng, ZHANG Yi, LI Yuan-jiang
(School of Electronics and Information, Jiangsu University of Science and Technology, Zhenjiang 212003, China)
When rescue detection equipment such as water-surface life-detection robots are in operation, their power supply voltage drops, which can cause them to enter a weak expansion state to improve maneuverability and stability.Under the condition of constant supply voltage, a single-current regulator control of the variable quadrature axis voltage method can effectively avoid the complexity of the control system caused by a double-current regulator, which maintains system control, improves the control efficiency, allows for the realization of a simple structure, provides safe control, and has a convenient effect.In this study, the feedback link of the field weakening control system and given method of variable quadrature axis voltage are improved, and a limit processing is added.A method of quadrature axis voltage setting is proposed, which divides the motor field weakening process into constant power field weakening and deep field weakening; in two parts, the quadrature axis voltage is adjusted in real time, in sections, to make the motor more robust in the deep field weakening state and improve its stability at high speeds.Through a Simulink simulation and an experimental data analysis, the reliability of the control method is verified.
permanent magnet synchronous motor;deep field weakening; single current regulator; voltage feedback; sectional change of quadrature axis voltage
梁裕, 刘维亭, 魏海峰, 等.永磁同步电机分段变交轴电压弱磁控制方法[J].水下无人系统学报, 2022, 30(1): 61-67.
TM351; TJ630.32
A
2096-3920(2022)01-0061-07
10.11993/j.issn.2096-3920.2022.01.008
2021-03-18;
2021-04-19.
国家自然基金科学基金项目(51977101); 江苏省省重点研发计划产业前瞻性与共性关键技术重点项目(BE2018007).
梁 裕(1996-), 男, 在读硕士, 主要从事电机驱动控制研究.
(责任编辑: 许 妍)
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
四川冶金(2018年1期)2018-09-25 02:39:26
通信电源技术(2016年1期)2016-04-16 04:57:26
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:42
电机与控制应用(2015年3期)2015-03-01 03:49:59
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29
