计及功率极性和序列连续性的三电平闭环虚拟矢量调制策略
2022-03-15 00:36李文善温旭辉张剑王又珑
电机与控制学报 2022年2期
李文善, 温旭辉, 张剑, 王又珑
(1.中国科学院大学 电子电气与通信工程学院,北京 100049;2.中国科学院电工研究所,北京 100190;3.齐鲁中科电工先进电磁驱动技术研究院,山东 济南 250100;4.中国科学院电力电子和电气驱动重点实验室,北京 100190)
0 引 言
降低碳排放,发展绿色航空是时代发展的要求。多电飞机/全电飞机是航空运输节能减排的有效路径。起动发电一体化是多电发动机的重要技术特征[1],可简化发动机的附件机匣,提高系统功率密度,是多电/全电飞机的关键支撑技术。大功率高速永磁电机在新型F16战机的组合动力装置中作为起动发电一体机获得实际应用[2]。
在大功率高速航空起动/发电机一体机系统中,电机的运行工况受限于发动机的运行状态[3]。电机长期运行于高速发电工况,为确保电机机械安全,转子上需增设护套。这导致转子散热难,永磁体存在过热退磁的风险[4]。因此,高速大功率起动发电机对变流器输出波形质量有较高要求。相比于两电平变流器,三电平变流器输出波形质量更优,在电机驱动系统中应用广泛,是高速起动发电机控制用变流器较优选择之一。中点箝位型(neutral point clamped, NPC)三电平结构紧凑,功率密度高,已在航空起动发电机控制系统中获得应用[5-6]。而中点电位不平衡是NPC型三电平的固有缺点,引起交流侧电压波形质量恶化和危害变流器安全,阻碍了其在航空发电系统的广泛应用。
中点电位偏差的抑制方法有两种:从硬件角度,可采用独立电源供电或背靠背三电平系统。从软件角度,在载波调制中采用零序电压的注入,此法在功率因数低或调制比低情况下中点电位平衡效果不佳。在空间矢量调制中则采用冗余小矢量法。文献[7,19]详细讨论了最近三矢量法(nearest three vector,NTV)空间矢量调制下中点电压不平衡机理,给出了利用正负小矢量的冗余性降低中点电位波动和偏差的方法。但是在高调制比和低功率因数区域,中矢量所产生的中点电位偏差不能被冗余小矢量完全抵消[8],该方法存在不可平衡区域[5,9]。与之相比虚拟空间矢量调制(virtual space voltage vector pulse width modulation,VSVPWM),以下称传统虚拟矢量,可以实现在高调制比和低功率因数工况下中点电荷为0[7-11,21-22],进而实现中点电位平衡控制,但与此同时也失去了对中点电位调节的能力,当中点电位受到扰动发生偏移时,中点电位恢复平衡过程时间较长[12]。因此对虚拟空间矢量调制算法进行优化设计十分必要[5,8,13-15,21-23]。文献[17]提出一种中点电压反馈量的闭环控制策略,根据中点电压调节调制波的波形以实现中点电位平衡,该方法适用于载波调制(carrier based pulse width modulation,CBPWM)。文献[12,16]提出了基于中点电位不平衡度反馈的三电平虚拟空间矢量调制方法(以下称传统闭环虚拟矢量调制),该方法同时对不平衡度的极性和相电流极性判断,能够在负载电流突变时取得较好的中点电位控制效果。但在低载波比下因较大的采样延迟,相电流极性易误判而导致中点电位失控。同时,传统闭环策略在控制中点电位偏差时,难以保证序列的连续性,造成线电压突变,引起波形畸变。文献[18]提出一种滞环控制和精确控制相结合的空间矢量调制策略,并在调制比为1的工况下取得较好控制效果。但牺牲了开关序列的连续性,且未指出该方法在双向功率流系统中的适用性。上述策略均不能满足高速起动发电机控制系统的需求。
本文针对高速起动发电机系统用三电平变流器中点电位平衡问题进行分析,并提出一种计及功率流极性和开关序列连续性的中点电位偏差闭环的虚拟空间矢量调制策略(以下称连续序列闭环虚拟矢量)。该策略在开关序列中设置闭环调节系数,通过该系数调节序列输出中点电荷,并保持序列的连续性。使用q轴电流判定功率极性而省去了相电流极性判断,避免了高速发电工况下由于低载波比造成的相电流极性误判引起中点电位偏差失控。
1 三电平中点电位不平衡分析
1.1 三电平拓扑及虚拟空间矢量调制原理
高速起动发电机系统用三电平变流器为T型箝位(T type neutral point clamped,TNPC)三电平,其主回路拓扑如图1所示。

图1 基于T型三电平的高速起动发电机变流系统Fig.1 Topology of T type three level converter for S/G
图1 中,T型中点箝位三电平变流器共有a、b、c三个桥臂,每个桥臂上4个开关管Tx1~Tx4(x=a,b,c)。直流母线由上下两个分压电容串联构成,分压电容电压中点用两只反并联逆阻型(reversing blocking,RB)IGBT箝位。三电平基本空间矢量可表示为
(1)
其中Sx=a,b,c为开关函数,其取值空间为(1,0,-1)。根据开关函数取值不同,三电平可输出大矢量6个,中矢量6个,小矢量12个,零矢量3个,三电平空间矢量可表示如图2所示。

图2 三电平基本电压矢量分布图Fig.2 Space voltage vector of three level converter
虚拟空间矢量是基本矢量的线性组合,其特征是理想情况下开关周期内基本矢量序列输出中点电荷为0[8,14]。全扇区内虚拟大矢量6个,虚拟小矢量6个,虚拟中矢量6个以及虚拟零矢量1个,共计19个,如图3所示。

图3 虚拟空间矢量空间分布图及A扇区分区示意Fig.3 Virtual voltage vector and its details in sector A
图3(a)中,虚线圆表示调制比。图3(b)给出了A扇区虚拟空间矢量的构成及其子区域划分。
根据扇区信息和基本矢量作用下电路拓扑可计算中点电荷为
(2)
其中:Ts表示PWM周期;iNP(sector)表示在相应扇区内的中点电流[15,20],可表达为
(3)
1.2 低载波比对虚拟空间矢量调制的影响
由于大功率高速电机基波频率较高但功率器件开关频率受限,因此载波比较低。低载波比工况下采样周期内三相电流和不能处处为0[22]。因此传统虚拟空间矢量无法实现中点电位平衡[7,14,21]。
以A2扇区为例,不同载波比下Ts时间间隔内,中点电流波形iNP如图4所示。

图4 不同载波比下中点电流波形(A2扇区)Fig.4 Neutral point current under different frequency ratio
图4(a)和(b)中点电荷统一计算式为

图4(a)中,相电流在开关周期内视为常数,因此,相电流幅值关系满足ia1=ia3=ia2,ic1=ic2=ic3=ic4,ib1=ib2,因此中点电荷Q=0。而在图4(b)中,相电流不满足在采样周期内处处相等。因此该序列输出中点电荷Q不为0,即不能实现中点电位平衡。
2 闭环虚拟空间矢量调制策略
2.1 传统闭环虚拟矢量调制策略
闭环虚拟矢量在传统虚拟空间矢量调制策略基础上增加中点电位偏差反馈,以弥补传统虚拟矢量调制在中点电位偏差控制方面的不足[12,16-18]。依据不平衡度和相电流极性选择合适的小矢量,其原理如图5所示。

图5 传统闭环虚拟矢量原理[12,16]Fig.5 Diagram of conventional closed loop VSVPWM[12,16]
图5中基本矢量表的设计原理如下,以A扇区为例:不平衡度1-2vC2/vdc<0且ia<0时,选择POO,1-2vC2/vdc>0且ia<0时选择ONN。不平衡度1-2vC2/vdc<0且ia>0时,选择ONN,1-2vC2/vdc>0且ia>0时选择POO。以上四种情形下,均使开关序列九段式降低七段式,如图6所示。
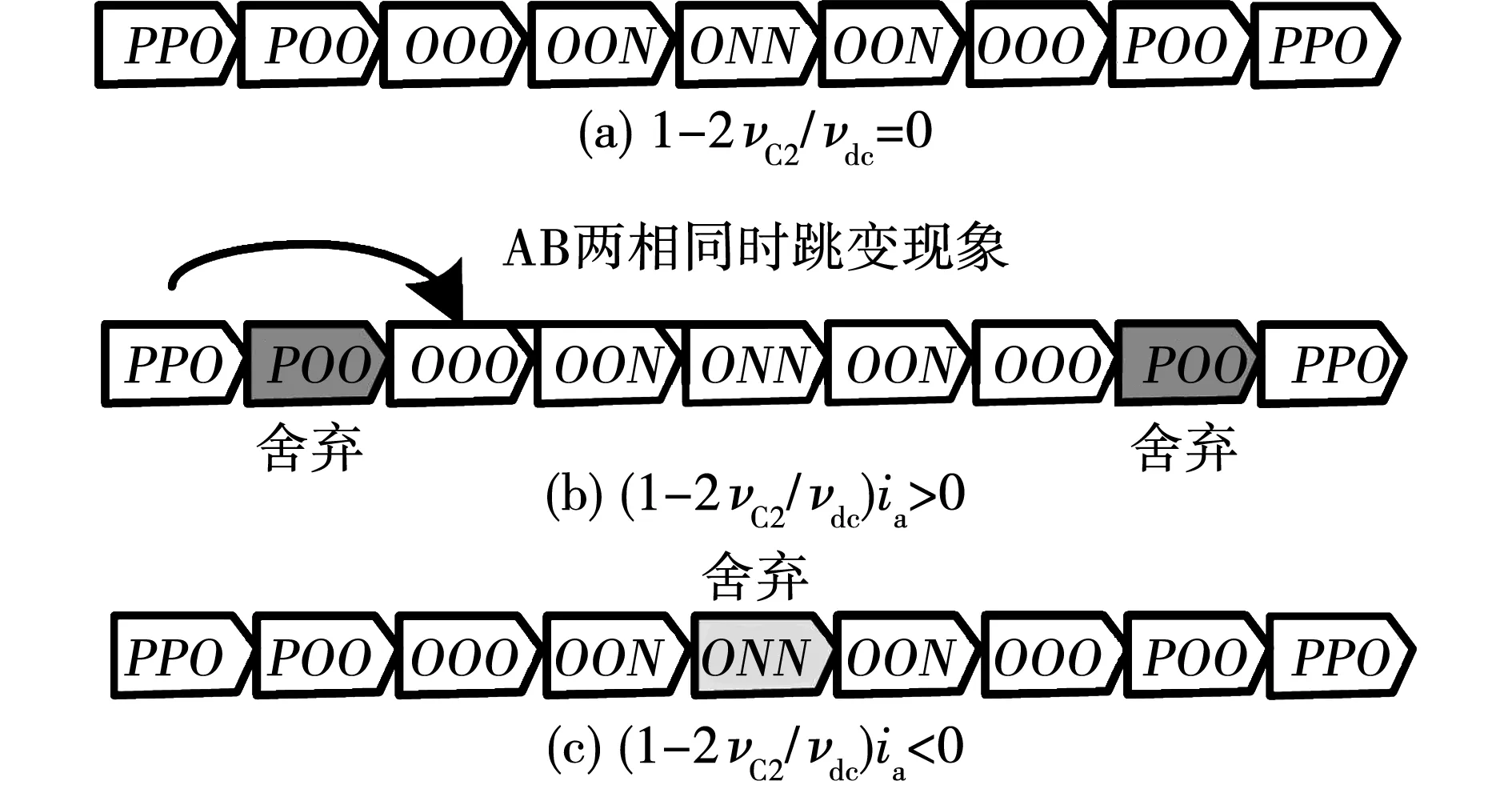
图6 传统闭环虚拟矢量输出开关序列Fig.6 Output switch pattern based on conventional closed loop VVSVPWM
舍弃小矢量后的开关序列虽然具备中点电位偏差的控制能力,但是存在开关状态的跳变,例如舍弃POO,则PPO向OOO换路时出现AB两相同时切换。
此外,基于相电流极性的判断方式在高速发电工况下出现较大采样误差。以载波比20为例,相电流波形采样误差如图7所示。在对称采样条件下,相电流采样值滞后于实际值1.5倍采样周期,即
ia_sample=ia_actuale-jω1.5Ts。
采样值与实际值关系表示如图7所示。

图7 低载波比下相电流采样误差Fig.7 Sample error of phase current under low frequency ratio
相电流过零点附近易产生相电流极性误判,如图7阴影所示。采样值ia_sample>0,但此时的实际值ia_actual<0。因此,低载波比工况下不宜采用相电流极性作为中点电位偏差闭环控制的依据。
2.2 连续序列闭环虚拟矢量调制策略
起动发电机用连续序列闭环虚拟空间矢量控制原理框图如图8所示。
图8中,起动发电机外环控制可选择为转速环和电压环,外环输出作为电流内环的输入,电流环输出产生参考电压。同时,根据功率流极性判断中点电荷极性以确定下一控制周期所使用的小矢量,并实现对中点电位偏差的控制。

图8 起动发电机系统用闭环虚拟矢量控制框图Fig.8 Diagram of closed-loop VSVPWM used in S/G system
1)基于功率流极性判断的小矢量选择原则。
起动发电机的重要特性之一是存在电动和发电两种功率流极性。功率流极性影响中点电位偏差控制效果,其正方向的定义如图9所示。

图9 T型箝位三电平变流器模型及功率极性Fig.9 Circuit model of T type three level converter and its power flow polarity
考虑图9所示三相电流正方向,并假设三相电流对称,则:
(4)
式中:φ为功率因数角;I为相电流有效值。假设永磁同步电机以单位功率因数运行,电机运行于起动模式,则φ=0;电机运行于发电模式,则φ=π。ω为电机电角频率。图10所示为两种功率流下的相电流波形。

图10 单位功率因数下理想相电流波形Fig.10 Phase currents under unit power factor
不同功率流下相同基本矢量作用时中点电荷的极性不同,综合式(2)~式(4),计算A扇区小矢量中点电荷极性如表1所示。

表1 A扇区小矢量中点电荷极性
2)开关序列连续条件下小矢量选择策略。
开关序列连续性是指在基本矢量切换时,同时仅允许一相开关状态发生切换。为方便达成此目标,对基本矢量数字化,即P→2,O→1和N→0,例如中矢量PON数字化后其数值为2+1+0=3,开关序列连续性可表述成基本矢量数值变化量小于等于1的设计原则。
为分析中点电位偏差条件下开关序列不连续对电压合成精度的影响,定义中点电位不平衡度为
(5)
式中字母定义参考图1,则各相输出电压可表示为
定义考虑中点电位偏差时等效开关函数为Sex(x=a,b,c),其取值为(1,-ξ,-1)则空间电压矢量的表达式为
(6)
则A扇区基本矢量OON,PPO和PON可分别表示为:
(7)
由式(7)可见,中点电位不平衡度对小矢量的幅值有影响,而对其相位无影响;对中矢量的相位和幅值均有影响。虚拟小矢量vzs2由基本矢量表示为
(8)
由式(8)可以看出,中点电位偏差对虚拟空间矢量的幅值和相位均无影响,vzs2在空间平面内端点位置不受中点电位偏差影响。vzs1和vzM有相同规律,如图11所示。图11中,端点1、端点2和端点3分别表示虚拟矢量vzs1、vzs2和vzM的端点。
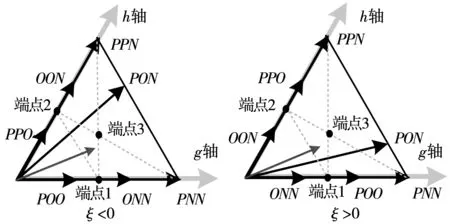
图11 考虑中点不平衡基本矢量与虚拟矢量A扇区分布Fig.11 Space diagram of basic voltage vector and virtual voltage vector in A considering neutral point unbalance
综上,中点电位偏差对虚拟矢量的幅值和相位均无影响。成对小矢量同时出现在开关序列中,则调节中点电位偏差时可保证序列的连续性,进而减小参考电压矢量合成误差。
3)闭环调节系数设计。
在开关序列中设置闭环调节系数k用以调节开关序列输出电荷幅值和极性。以A2扇区为例,考虑闭环调节系数的基本电压矢量序列,如图12所示。
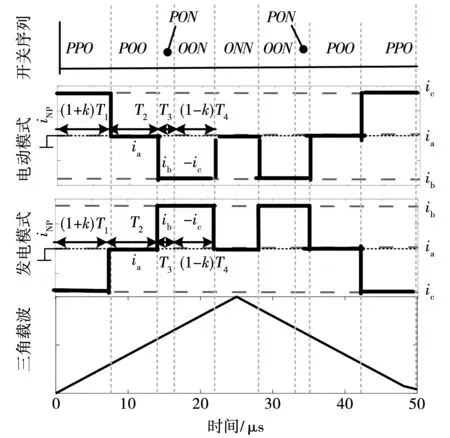
图12 考虑闭环调节系数的开关序列(A2)Fig.12 Switch pattern considering NP voltage closed loop control coefficient
则考虑闭环调节系数A2扇区基本电压矢量序列输出中点电荷变化量为
(9)
式中:Qk为考虑闭环调节系数后序列的中点电荷;Q为传统序列中点电荷。由式(9)可以看出,通过闭环调节系数k可以改变中点电荷大小和极性。其中k=0时不改变原有序列的电荷状态,其特性与传统虚拟矢量相同。闭环调节系数k的取值流程图如图13所示。
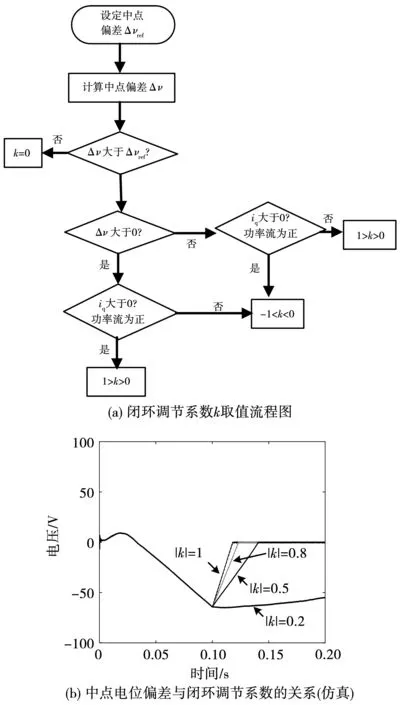
图13 起动发电机系统闭环系数k设计Fig.13 Diagram of setting coefficient k for the S/G system
图13(a)中,功率流为正表示功率由变流器流向电机,功率为负表示由电机流向变流器。图13(b)中,0.1 s时刻闭环策略切入,可以看出闭环调节系数k取不同值对中点电位偏差的收敛速度有较大影响,k绝对值越大收敛速度越快。
3 仿真分析及实验验证
3.1 仿真分析
针对30 000 r/min高速起动发电机进行仿真研究。利用Simulink工具箱软件搭建高速起动发电机控制系统,如图14所示。
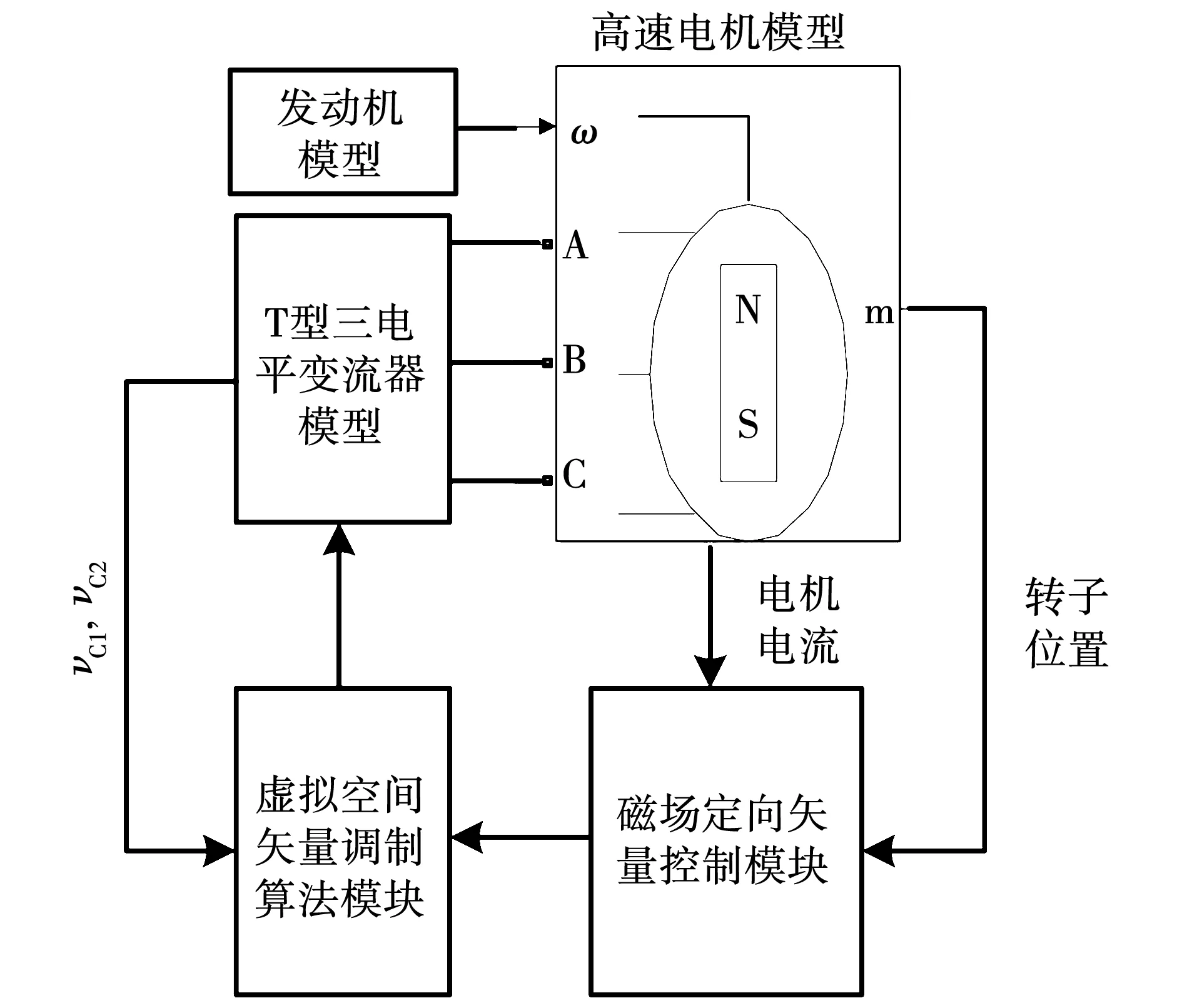
图14 高速起动发电机控制系统仿真框图Fig.14 Simulation diagram of high speed S/G
永磁同步电机和IGBT模块仿真模型采用工具箱自带模型,电机控制算法为磁场定向控制。机械特性模拟模块用以模拟发动机机械特性,电机仿真参数如表2所示。所得仿真结果如图15所示。
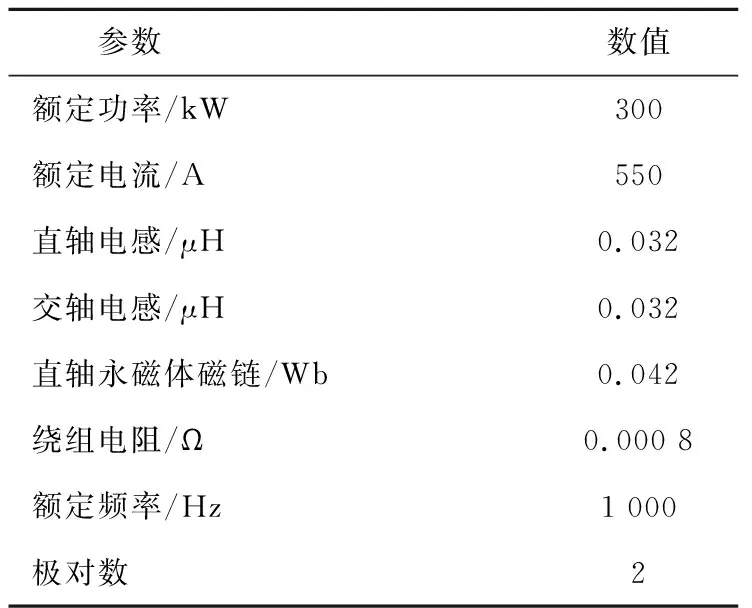
表2 高速永磁同步电机主要参数
图15中,0时刻起动发电机为电动状态,带动发动机旋转;0.2 s时刻发动机点火,发动机带动起动发电机发电,于0.6 s时刻突加负载。

图15 起动发电机动态工况模拟下中点电位控制效果对比Fig.15 Comparation of the three modulations method under S/G dynamic state
由图15(a)可知,转速升高后,传统虚拟空间矢量调制策略下,中点电位偏差较大。由图15(f)可知,传统闭环虚拟空间矢量仅能实现发电状态中点电位可控,无法实现电动和发电双功率极性下中点电位偏差可控。对比图15(a) 、(d) 、(g)可知,计及功率流极性的连续序列闭环虚拟矢量可在起动发电机全工况下实现中点电位平衡。对比图15(b)、 (e)、(h)转矩放大图可知,连续序列闭环虚拟空间矢量调制策略下,转矩波动小于传统闭环方法。
三种策略下高速发电稳态下控制性能对比,如图16所示,传统虚拟空间矢量调制策略下,中点电位偏差值较大,终值为-600 V,下半桥臂开关管承受全母线电压,功率器件电压应力增加,线电压波形具有两电平特征。而传统闭环虚拟矢量中点电位偏差得到了较好的控制,线电压波形维持三电平变流器的特征。但从相电流波形频谱上看,采用中点电位偏差闭环控制后,相电流边带谐波下降明显,其中1倍频边带谐波基本消除,其他高频谐波也有下降。
对比图16(f)、(i)可知,考虑序列连续性的闭环虚拟空间矢量调制策略下,相电流的总谐波含量低于传统闭环虚拟矢量调制,由11.06%下降到5.89%。据文献[24]研究结果,对电机转子永磁体的涡流损耗影响较大的是高频电流,据此判断中点电位的平衡控制对转子涡流损耗具有改善作用。而连续序列闭环虚拟矢量调制方法对低频和边带谐波均有抑制作用。
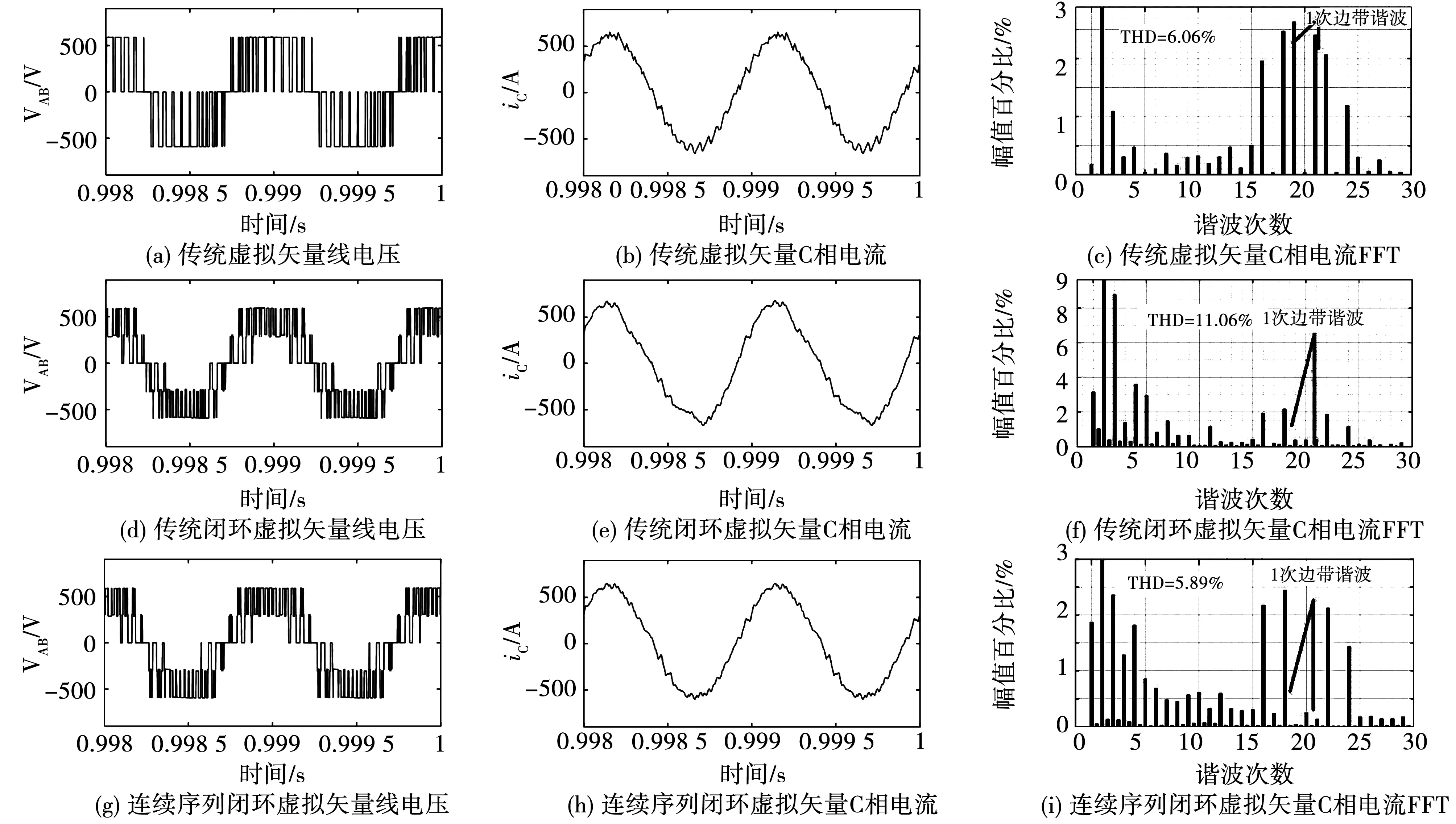
图16 高速发电稳态工况下三种调制策略性能对比Fig.16 Performance comparation of the three modulations method under high speed steady state
3.2 实验分析及验证
1)阻感负载实验。
为进一步评估三种调制算法的性能,在实验室搭建了T型三电平变流器阻感负载测试实验平台,用以评估传统虚拟矢量调制,传统闭环虚拟矢量调制和考虑序列连续性闭环虚拟矢量三种虚拟空间矢量调制的性能。电阻5 Ω,电感500 mH,载波比选择为20,所得实验结果如图17所示。
由图17(b)可以发现,传统闭环虚拟矢量在实现中点电位平衡的同时,线电压波形出现“跳变”现象。线电压跳变时刻,相电流波形也存在畸变。采用连续序列闭环虚拟则能在中点电位偏差得到控制的同时避免线电压跳变和相电流畸变。三种策略下,相电流频谱如图18所示。
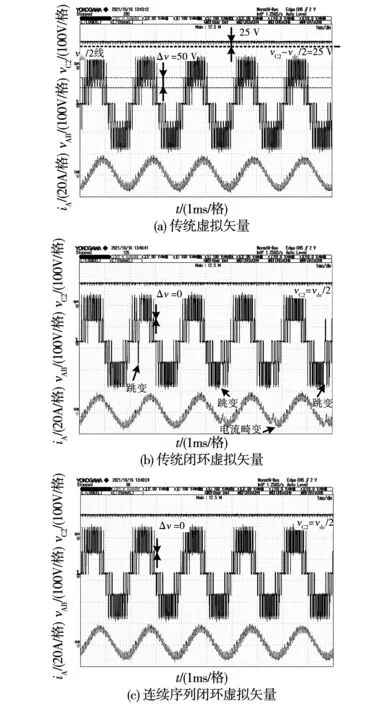
图17 阻感负载条件下线电压、相电流和直流下 侧电容电压Fig.17 Wave of the line voltage phase current and vC2 under RL load condition
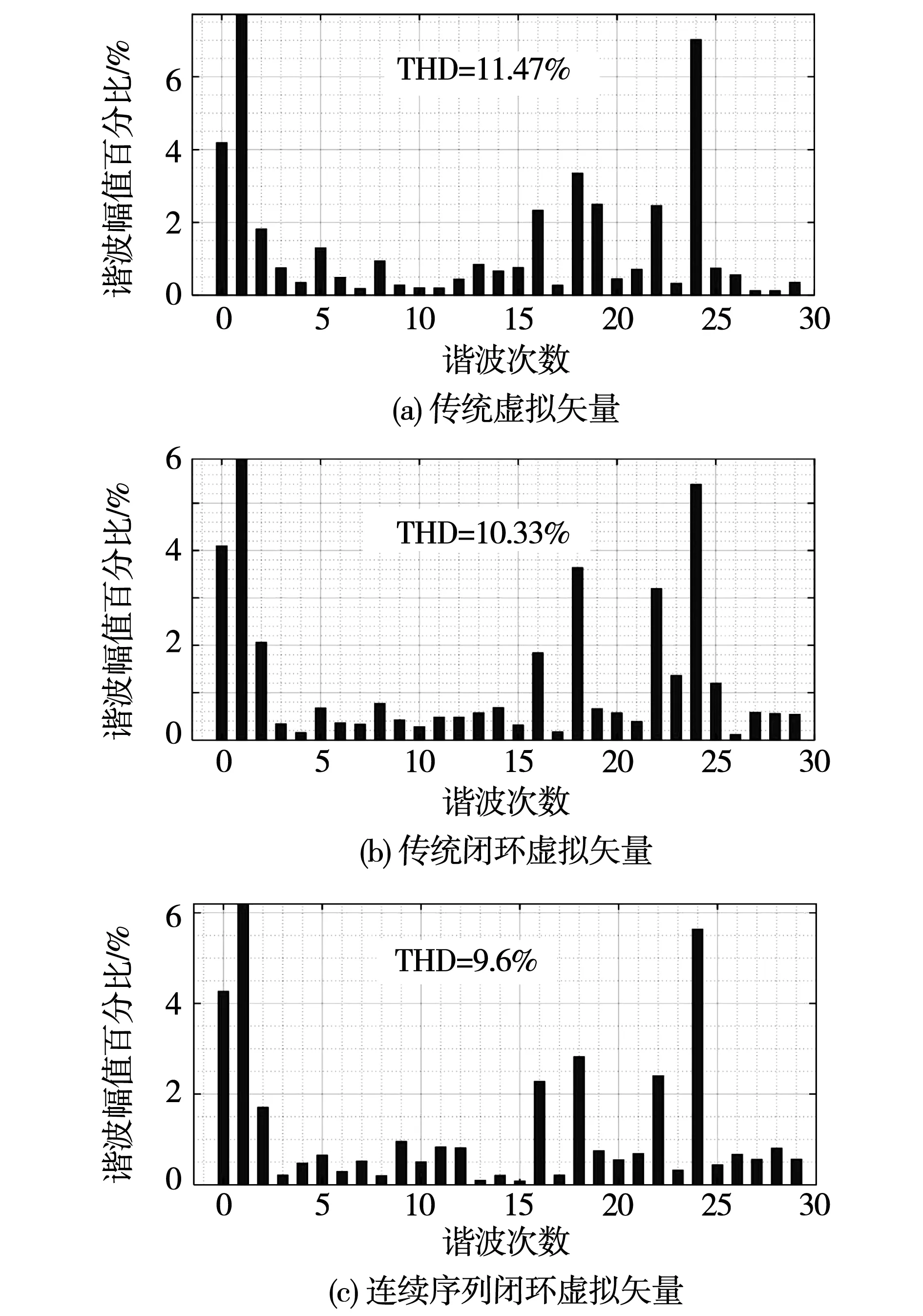
图18 阻感负载条件下电流频谱对比Fig.18 FFT results of the three modulation strategies under RL load condition
对比相电流频谱可以看出,采用闭环虚拟矢量调制后边带谐波降低。此外,考虑序列连续性的连续序列闭环虚拟矢量与传统闭环虚拟矢量调制相比,总谐波畸变率,低频带和边带谐波均有下降。
2)高速电机实验。
搭建基于T型三电平变流器的永磁同步电机样机实验系统如图19所示,电机工作额定转速30 000 r/min。分别进行低速起动(图20所示)和高速发电实验(图21~图25所示)。

图19 高速起动发电及其测试系统Fig.19 High speed starter generator and its test system
高速起动发电机系统控制变量通过CAN总线使用上位机进行数据存储。电机起动时直流电压300 V恒定,起动过程中点电位偏差连续序列闭环控制效果如图20所示。
由图20(a)可以看出,电机起动过程中,中点电位偏差逐渐变大,转速稳定后,中点电位偏差收敛于稳定值,此过程与图15仿真结果趋势相同。由图20(b)采用连续序列闭环虚拟矢量控制后,在电机起动阶段,中点电位偏差收敛到指令值附近。
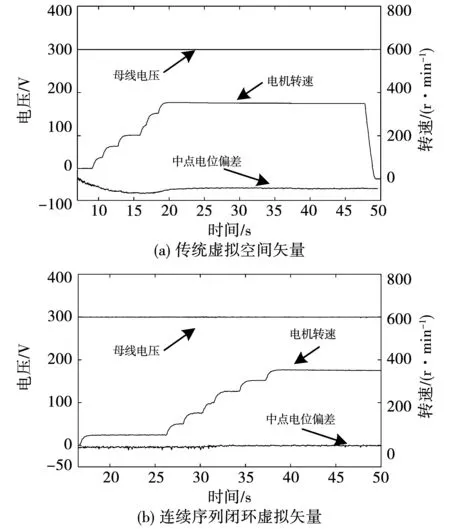
图20 电机起动暂态过程中中点电位偏差控制效果Fig.20 Results of neutral point voltage deviation control during motor starting process
电机转速从8 000 r/min升至15 000 r/min过程为发电工况。两种虚拟矢量实验结果如图21和图22所示。

图21 传统虚拟矢量下中点电位偏差Fig.21 NP voltage deviation based on open loop virtual vector

图22 连续序列闭环虚拟矢量中点电位偏差波形Fig.22 Neutral point voltage deviation based on closed loop virtual vector considering switch pattern continuity
由图21可知,随着转速的升高,中点电位偏差逐渐增大。当发电机达到15 000 r/min时,中点电位偏差接近-70 V。采用连续序列闭环虚拟矢量控制后,实验结果如图22所示。
由图22可知,在发电机转速变化时,中点电位偏差始终维持在指令值20 V附近,中点电位偏差得到有效控制。发电机稳态运行于15 000 r/min时,采集线电压及相电流波形如图23所示。

图23 电压电流波形及电流频谱分析Fig.23 Voltage and current waveform and FFT of phase current
对比图23(a)和(c)可知,采用所提出的中点电位偏差连续序列闭环控制策略后,中点电位偏差控制在指令值20 V附近,控制效果良好。此外,电机端电压的峰值由480 V降低为460 V。这有利于降低变频器开关过程对电机绝缘寿命的影响。
为对比传统虚拟空间矢量调制和连续序列闭环虚拟矢量调制在低载波比条件下,对中点电位偏差的控制性能,发电机升速至30 000 r/min,发电电压控制在600 V,功率约200 kW,实验结果如图24和图25所示。
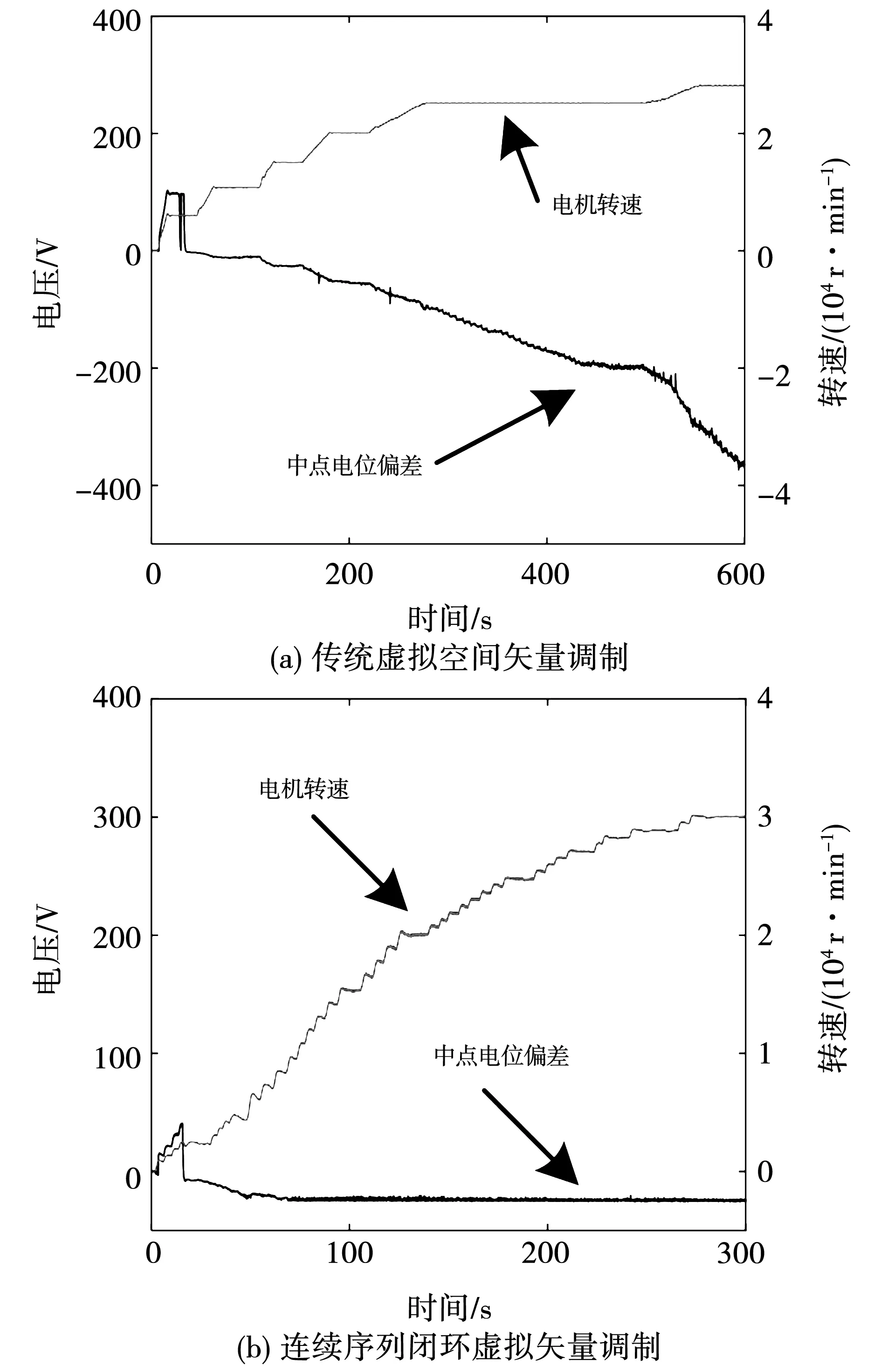
图24 高速发电工况下中点电位偏差控制效果对比Fig.24 Experimental results of NP voltage control at high speed generation condition
由图24(a)可见,发电机超过20 000 r/min,中点电位偏差呈现失控发散趋势,偏差达-400 V,严重危害变流器安全。由图24(b)可以看出,在30 000 r/min电机实验中,中点电位偏差收敛于指令值附近。电机运行于30 000 r/min发电工况时,中点电位不平衡度为3.3%,稳定在指令值附近。30 000 r/min稳态工况下电机线电压及相电流波形如图25所示。

图25 起动发电机30 000 r/min线电压相电流实验波形Fig.25 Experimental results of the starting generator under 30 000 r/min
从图25可以看出,在30 000 r/min工况下,基波周期内脉宽调制(pulse width modulation, PWM)脉冲数量相比于15 000 r/min(图23)明显降低,但此时中点电位偏差维持在20 V附近,此实验证明低载波比下连续序列闭环虚拟空间矢量控制仍有效。
不同工况下中点电位不平衡度总结在表3中。
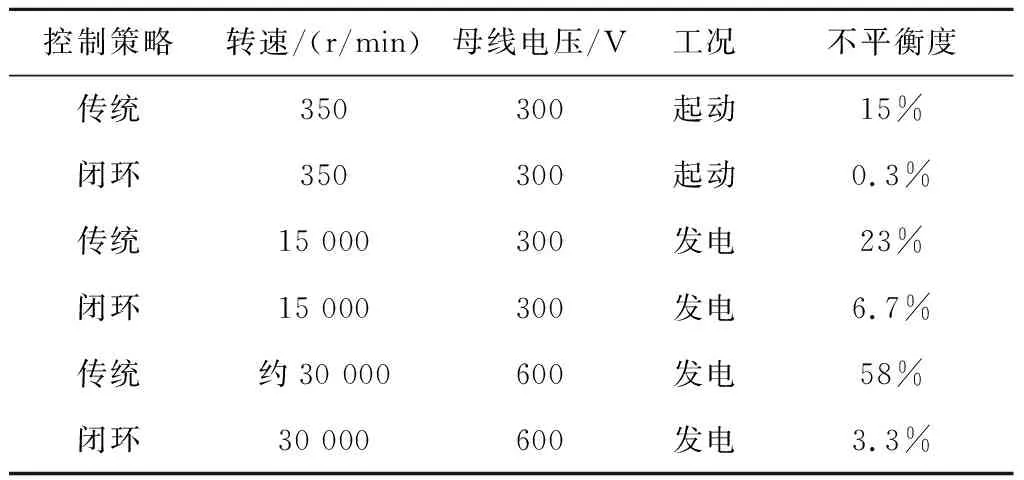
表3 各工况下不平衡度对照表
从表4可以看出,传统虚拟空间矢量调制策略下,中点电位不平衡度随着转速的增加逐渐增大。而连续序列闭环虚拟矢量调制策略下,中点电位不平衡度则逐渐降低,其原因在于中点电位偏差跟踪指令值后,在全工况范围内维持恒定。
4 结 论
本文分析了三电平变流器应用在高速起动发电机控制系统中所面临的中点电位不平衡问题,针对大功率高速起动发电机双向功率流和高速发电工况低载波比的特征,提出考虑功率流极性和开关序列连续性的闭环虚拟空间矢量调制策略,得到以下结论:
1)提出的闭环虚拟矢量在起动/发电两种功率流极性和载波比为20的工况下,具备中点电位偏差控制能力。在30 000 r/min高速发电稳态工况下,中点电位不平衡度3.3%。
2)在开关序列中引入闭环调节系数可在保持序列的连续性的前提下实现中点电位偏差可控。仿真及阻感负载实验结果表明,考虑序列连续性的闭环虚拟空间矢量控制既能实现中点电位偏差有效控制,又能改善系统相电流的谐波特性,尤其对边带谐波削弱明显。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
现代电影技术(2022年1期)2022-02-15
铁道机车车辆(2021年3期)2021-07-12
科学家(2021年24期)2021-04-25
电子制作(2017年10期)2017-04-18
客车技术与研究(2015年3期)2015-08-24
商场现代化(2015年2期)2015-03-11
海外英语(2013年2期)2013-08-27