基于两种柔性铰链压电陶瓷柔顺微夹钳性能分析
2022-03-09 02:55赵大明高兴军邓子龙
辽宁石油化工大学学报 2022年1期
赵大明,高兴军,王 月,邓子龙
基于两种柔性铰链压电陶瓷柔顺微夹钳性能分析
赵大明1,高兴军1,王 月2,邓子龙1
(1.辽宁石油化工大学 机械工程学院,辽宁 抚顺 113001; 2.沈阳隆基电磁科技股份有限公司,辽宁 抚顺 113122)
柔顺微夹钳在微操作领域和微装配过程中与被夹持物直接接触,作为微操作和微装配系统中的末端微执行器,对实现微操作和微装配任务起重要的作用。设计一种基于直圆柔性铰链和簧片型等腰梯形柔性铰链的柔顺微夹钳机构,通过理论计算推导出等腰梯形柔性铰链的转动精度和转动刚度。采用压电陶瓷驱动方式,实现了位移的放大和夹爪位移的平行移动。建立了柔顺微夹钳的机械伪刚体模型,并利用伪刚体模型法建立了运动学模型,计算出位移放大倍数,得到了输入力、输入位移与输出位移的关系。通过有限元方法对系统建立的模型进行了仿真分析验证,结果表明理论计算结果与仿真结果一致。
微夹钳; 结构设计; 等腰梯形柔性铰链; 伪刚体模型; 性能分析
在微机电系统(MEMS)中,柔顺机构有巨大的潜力和优势[1]。随着MEMS的迅速发展,MEMS技术已经应用于生物医学工程、扫描隧道显微镜[2]、微器件键合、光学器件装配与光纤对接等众多领域,其产品对象不断向微细化发展。在MEMS领域中,微小目标物体的加工、调整,对多个微小目标物体的装配作业等工作都需要微操作和微装配系统的参与[3]。由于微夹钳在微操作系统中直接与被夹持物接触,故其工作稳定性与工作精度对操作系统的性能有至关重要的影响[4]。对微夹钳机构按驱动方式分类,主要分为电热驱动微夹钳、压电陶瓷微夹钳、电磁式微夹钳、静电驱动微夹钳[5]和记忆合金微夹钳。与上述驱动方式相比,压电陶瓷驱动具有响应速度快、分辨率高、易加工、易控制、输出力大、精度高的特点[6]。此外,机构中的刚性铰链存在间隙和摩擦的问题。柔顺机构很好地避免了上述刚性铰链机构的缺陷,它以柔性铰链代替传统刚性铰链,柔性铰链通过弹性变形来产生运动、传递能量、提供角位移,因而可减少间隙和摩擦,降低成本。
在微夹钳设计中,驱动方式占据着重要位置,它决定夹持的范围和夹持力的大小,是微夹钳设计的关键。压电陶瓷驱动是近些年来普遍用于微夹钳中的一种驱动方式。国内外相关学者研究并开发了多种基于压电陶瓷的微夹钳。例如,日本名古屋大学的F.Arai等[7⁃8]研制了压电驱动微夹钳,意大利Mi⁃Tech实验室研制了压电体驱动微夹持器[9],南京航空航天大学研发了一种带力反馈的主从式微操作系统[10],大连理工大学研制了一种利用拓扑优化的方法设计的柔顺微夹钳机构[11]。微夹钳的柔顺机构常采用基于单轴柔性铰链的挠性件。簧片型柔性铰链因结构简单、加工容易且转动范围大在微夹钳的结构中得到广泛应用[12]。
本文设计和分析了一种基于直圆柔性铰链和簧片型等腰梯形柔性铰链的柔顺微夹钳机构;利用伪刚体模型法建立了柔顺微夹钳机构的运动学模型;利用ANSYS Workbench软件对微夹钳柔顺机构的特性进行了有限元分析,并与理论计算的结果进行了对比。
1 柔顺微夹钳设计
柔顺微夹钳三维模型如图1所示。其长度为60 mm,宽度为30 mm,厚度为3 mm,结构由压电陶瓷、位移放大机构、直圆柔性铰链、簧片型等腰梯形柔性铰链、平行四边形机构和夹爪等组成。
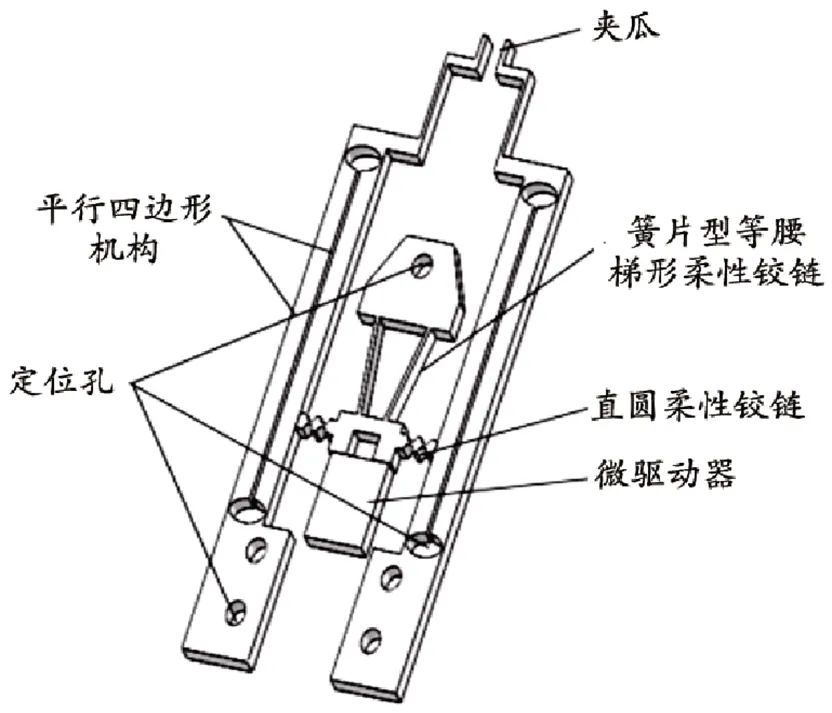
图1 柔顺微夹钳结构三维模型
1.1 簧片型等腰梯形柔性铰链(LITFP)刚度
簧片型等腰梯形柔性铰链模型如图2所示,LITFP结构刚体模型及等效伪刚体模型的主要参数如图3所示。实质上,LITFP是一个虚拟转动中心机构,且顺时转动中心唯一,即在两腰的延长线交点处。当固定梯形上底或下底时,另外一方可绕瞬时转动中心转动。
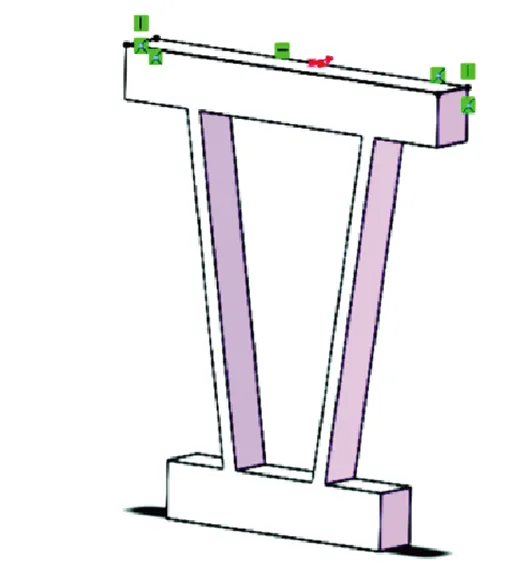
图2 簧片型等腰梯形柔性铰链模型

图3 LITFP结构刚体模型及等效伪刚体模型的主要参数
对于LITFP构型,需要通过三个独立的参数来描述:(1)f,上刚体(梯形中较长的底边)到虚拟转动中心点的距离;(2)f,下刚体(梯形中较短的底边)到虚拟转动中心点的距离;(3),两个柔性铰链轴线夹角的1/2。
1.1.1LITFP转动精度 当夹角2保持不变时,其余两个参数的等效关系满足:

式中,为实际模型中上刚体到虚拟转动中心的距离,mm;为修正系数,其变化范围为15/17~5/6;下角标f代表柔性体;下角标r代表刚性体。
LITFP的伪刚体模型分析如图4所示。
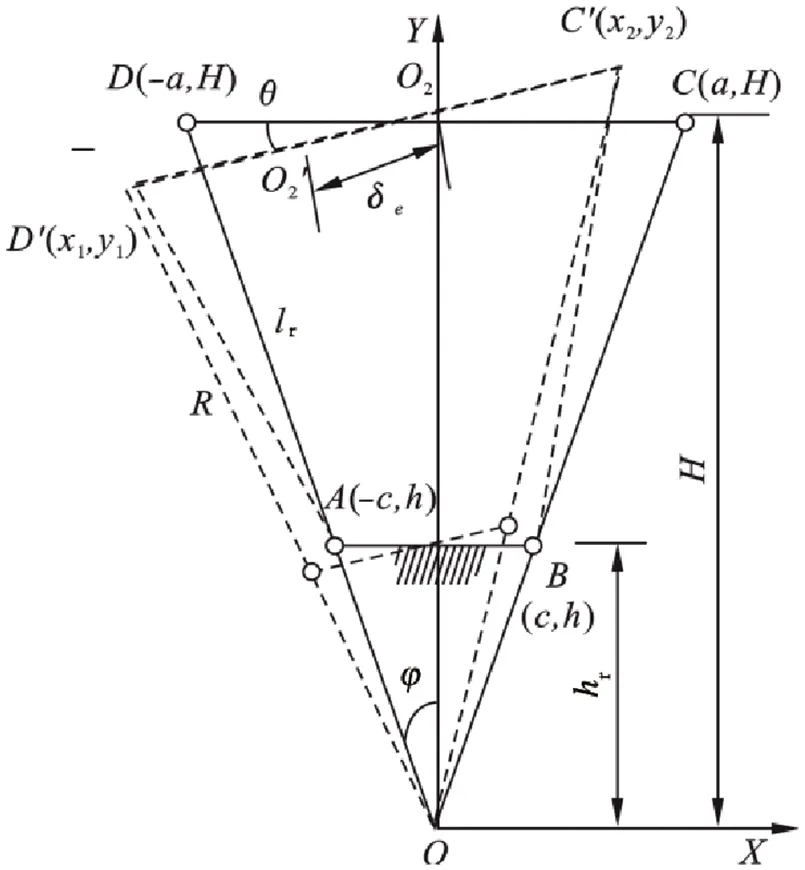
图4 LITFP的伪刚体模型分析
其表达式为:
式中,为连杆长度的1/2,mm。

式中,为连杆长度的1/2,mm。
刚体的转动角度表示铰链的变形程度,逆时针方向为正。设刚体转动后达到,其坐标值由下列方程组得到:
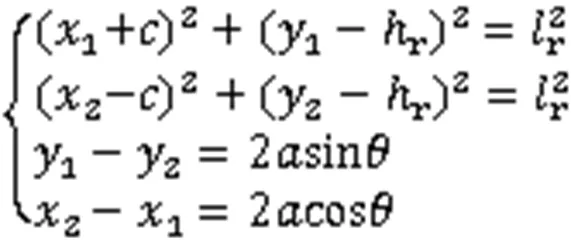
求解式(7)得:



1.1.2LITFP转动刚度 受弯矩作用时,LITFP的伪刚体模型及上刚体的受力分析如图5所示。
(a)受弯矩作用时的伪刚体模型
(b)上刚体DC的受力分析
图5受弯矩作用时,LITFP的伪刚体模型及上刚体的受力分析
由图5(a)可以看出,输入端力的作用使簧片型等腰梯形柔性铰链受一弯矩并作用于刚体上。弯矩由两根扭簧平衡,转动角度分别为1、2。由图5(b)可以看出,反作用力P、P分别垂直于连杆和,连杆和分别受轴向力N和N。簧片型等腰梯形柔性铰链各力之间满足:




式中,F、F分别为点、点在轴方向所受的力,N;F、F分别为点、点在轴方向所受的力,N。
其中,1和2分别由式(15)和式(16)得到。

式中,d和d分别为铰链点和移动的距离,是转动角度的函数。
P和P由式(17)和式(18)得到。
式中,为刚度系数。
施加于刚体上的力满足平衡条件:


求得弯矩,即:

1.2 柔顺微夹钳位移放大比

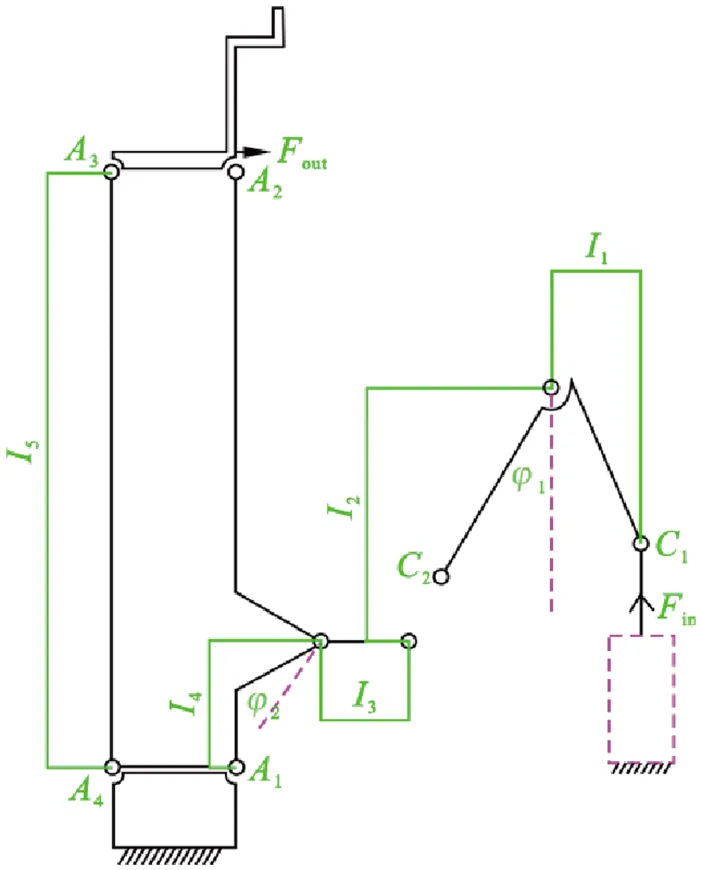
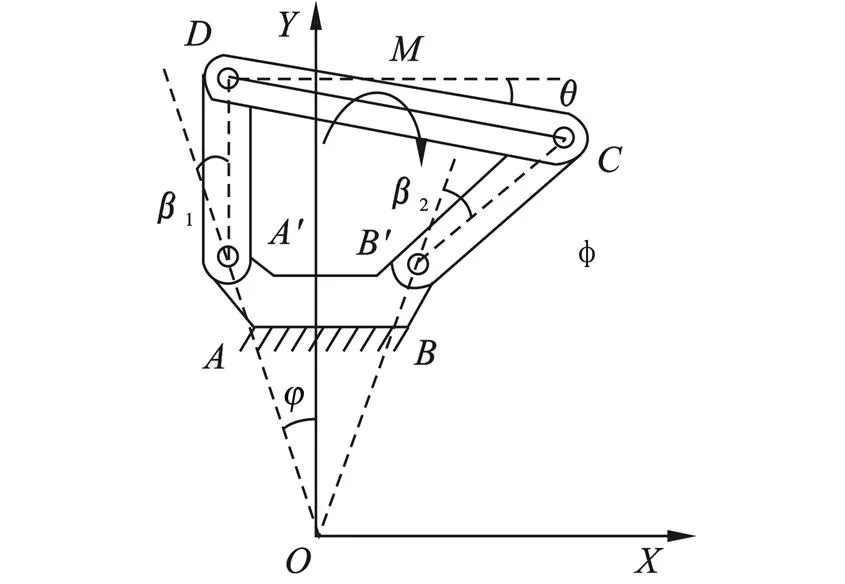
图6 微夹钳机构的伪刚体模型
假设柔性铰链仅产生转角变形而且转角很小,并假定逆时针方向转角为正,无伸缩及其他变形,sin=,则存在如下关系:



式中,1和2分别为杆和12与轴的初始夹角(见图6),其表达式为:


代入数据得,=21.75。
2 微夹钳有限元分析
柔顺微夹钳的材料为铝合金(6061),弹性模量=72 GPa,泊松比=0.33,密度=2 800 kg/m3,抗拉强度b=124.0 MPa,屈服强度s=55.2 MPa。选取压电陶瓷PZT 150/5×5 /40,长度= 36 mm,标称位移为40 μm。利用ANSYS Workbench软件仿真分析,分别在输入端加载输入力和输入位移,在输出端夹爪位置施加夹持力进行有限元分析,得到柔顺微夹钳的输入力、输出力、输出位移之间的关系。
2.1 模拟分析
ANSYS软件中导入Solidworks中建立的三维模型。以微夹钳结构图中的定位孔为固定端,添加约束,有限元模拟网格采用自动划分。为了保证求解结构的可靠性,对柔性铰链的应力集中处网格细分,这样既可以提高微夹钳模型的精度,也可以简化计算,最终共有226 481个节点,44 901个单元。微夹钳的网格划分如图7所示。
图7 微夹钳的网格划分
为了验证微夹钳的性能分析结果,首先在输入端施加一个10 N的力,并且在夹爪处施加100 mN的力,输出位移云图如图8所示。由图8可知,其最大输出位移可达到330.1 μm。
图8 输出位移云图(单位:mm)
2.2 输入力与输出位移的关系


图9 微夹钳的等效应力图
在输入端施加力,可得到输出位移与输入力的关系曲线,结果如图10所示。由图10可知,不管是理论值还是仿真值,输入力与输出位移之间呈线性关系,表明微夹钳性能较稳定。

图10 微夹钳输入力与输出位移的关系曲线
2.3 输入位移与输出位移的关系
微夹钳输入位移与输出位移的关系曲线如图11所示。由图11可知,当输入端加载输入位移in=50 μm时,输出位移out=527.90 μm;不管是理论值还是仿真值,输入位移与输出位移均呈正比关系。ANSYS Workbench分析得到的位移放大倍数1=13.20,通过理论计算得到的位移放大倍数2=21.75,理论计算的位移放大倍数偏大,主要是由于等腰梯形柔性铰链未考虑弯矩的影响,而在实际情况下会受弯矩的影响。

图11 微夹钳输入位移与输出位移的关系曲线
3 结 论
研究并设计了一种基于簧片型等腰梯形柔性铰链和直圆柔性铰链的微夹钳机构,并建立了微夹钳的伪刚体模型,理论推导出簧片型等腰梯形柔性铰链的转动精度和转动刚度。通过伪刚体模型,推导出微夹钳的位移放大倍数。同时,利用有限元分析软件对柔性微夹钳的性能进行了分析,包括输入力与输出位移的关系、输入位移和输出位移的关系。结果表明,本文设计的柔顺微夹钳机构在输入端施加输入位移时,输出位移可达到527.90 μm,有限元仿真结果与理论计算结果一致。
[1] 王立鼎,刘冲.微机电系统科学与技术发展趋势[J].大连理工大学学报,2000,40(5):505⁃508.
[2] 李庆祥,李玉和.微装配与微操作技术[M].北京:清华大学出版社,2004.
[3] 权哲浩,林玉池,仝凌志,等.扫描隧道显微镜微动台的有限元分析与实验研究[J].传感器与微系统,2008,27(4):74⁃76.
[4] 侯晓丹,权诺,杨鹏飞,等.一种柔顺微夹钳机构的拓扑优化方法研究[J].太原科技大学学报,2018,39(5):369⁃373.
[5] 董浩民.单片柔顺机构微夹钳的性能分析及控制技术的研究[D].重庆:重庆大学,2011.
[6] 纪久祥.柔顺微夹钳的设计及特性分析[D].重庆:重庆大学,2015.
[7] Arai F,Andou D,Nonoda Y,et al.Integrated microendeffector for micromanipulation[J].IEEE/ASME Transactions on Mechatronics,1998,3(1):17⁃23.
[8] Arai F,Nonoda Y,Fukuda T,et al.New force measurement and micro grasping method using laser raman spectrophotometer[C]//Proceedings of the IEEE International Conference on Robotics and Automation.Minneapolis:[s.n.],1996.
[9] Maria C C,Anna E,Arianna M,et al.Tow+ards a force⁃controlled microgripper for assembling biomedical microdevices[J].Journal of Micromechanics and Microengineering,2000,10:271⁃276.
[10] 韩江义,游有鹏,王化明,等.一种带力传感的微夹持器设计及试验[J].机器人,2009,31(1):67⁃71.
[11] 郝秀春,褚金奎.电热微夹钳的热效应分析和数值模拟[J].中国机械工程,2005,16(14):1269⁃1271.
[12] 郝秀春.电热驱动微夹钳的拓扑设计及相关问题研究[D].大连:大连理工大学,2006.
[13] Howell L L.Compliant mechanisms[M].[S.l.]:John Wiley & Sons Canada,Limited,2001.
[14] 陈景春,张丽,杜胜民,等.基于模态和谐响应分析的压缩机管系振动分析[J].石油化工高等学校学报,2017,30(3):96⁃98.
[15] 张修铭,陈盛军,邓子龙,等.汽轮机叶片阻尼涂层减振研究[J].辽宁石油化工大学学报,2020,40(3):58⁃60.
Design of Piezoelectric Ceramic Pliable Microgripper Based on Two Flexible Hinges
Zhao Daming1, Gao Xingjun1, Wang Yue2, Deng Zilong1
(School of Mechanical Engineering,Liaoning Petrochemical University,Fushun Liaoning 113001,China;2.LONGI Magnet Co. Ltd., Fushun Liaoning 113122, China)
The compliant microgrippers are directly contacted with the gripper in the microoperation field and during microassembly.And as the end microactuator in the micro⁃operation and micro⁃assembly system,it plays an important role in realizing micro⁃operation and micro⁃assembly tasks.A flexible microgripper mechanism based on straight circular flexure hinge and reed isosceles trapezoidal flexure hinge was studied in this paper.The displacement amplification and parallel displacement of gripper displacement were realized by piezoelectric ceramic driving.The mechanical pseudo⁃rigid body model of the flexible microgripper was established, and the kinematics model was established by using the pseudo⁃rigid body model method.Furthermore, the displacement amplification factor was calculated, and the relationship among the input force, input displacement and output displacement was obtained.The finite element method was used to simulate and verify the model.The results show that the prediction of theoretical values is consistent with the simulation results.
Microgripper; Structure design; Isosceles trapezoidal flexure hinge; Pseudo⁃rigid body model; Performance analysis
TH112
A
10.3969/j.issn.1672⁃6952.2022.01.012
1672⁃6952(2022)01⁃0064⁃06
2020⁃10⁃20
2020⁃11⁃16
辽宁省教育厅项目(L2017LQN024)。
赵大明(1994⁃),男,硕士研究生,从事机械现代设计理论与方法方面的研究;E⁃mail:2513983644@qq.com。
邓子龙(1967⁃),男,硕士,教授,从事机械现代设计理论与方法、机电液一体化方面的研究;E⁃mail:dzl568@sina.com。
http://journal.lnpu.edu.cn
(编辑 宋锦玉)
猜你喜欢
机械科学与技术(2022年8期)2022-08-30
纺织学报(2022年8期)2022-08-26
交通科技与管理(2022年9期)2022-05-24
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
北京航空航天大学学报(2021年7期)2021-08-13
时代汽车(2021年11期)2021-08-04
汽车零部件(2021年1期)2021-02-02
居业(2018年5期)2018-10-24
计算机应用(2016年9期)2016-11-01
中学生数理化·八年级物理人教版(2016年5期)2016-08-26