智能限高系统及限高架设计
2022-03-08 09:16:54史菲帆郑元勋姜田田王九洲申超鹏
产业与科技论坛 2022年5期
□史菲帆 郑元勋 张 茜 姜田田 王九洲 申超鹏
随着我国道桥隧涵等交通设施大规模兴建,大型运输车、集装箱汽车及特殊车辆等数量也相应快速增加,导致机动车撞击限高架或桥梁涵洞的事故频发,易造成交通堵塞[1]。限高架作为保护道桥隧涵安全及行车安全的重要辅助措施,在保护结构安全的同时屡屡导致严重的车——杆相撞事故发生,造成了极坏的社会影响。目前大多数限高架采用刚性门架结构,以强硬手段拦截超高车辆,由于预警提示不足,且无法保证消防及卫生急救等应急通道的畅通[2]。类似佛山高明区高明大桥“钢结构限高2.2米龙门架”被碰撞30多次、成都桂龙大桥运渣车与限高架相撞等悲剧仍在上演。究其原因,一方面是道路交通压力大、驾驶员安全意识薄弱或对车高判断有误;另一方面是限高架自身设计缺陷及预警提示设施不足[3]等。为有效避免类似情况发生,设计一种智能安全的限高架是亟待开展的工作,为达到保护路桥涵隧,同时保障人、车以及限高架安全的目的,则需要利用智能信息系统及刚柔结合的限高架设置[4],给予驾驶人员充分的预警信息,并在智能限高架后方一定距离处,设置裹覆弹性材料的刚性传统限高架及车辆返回路线。
一、限高架结构设计及工作流程
限高架结构包括左右竖杆、左右横杆、仪器杆;左右竖杆均垂直设置,左右横杆均水平设置,仪器杆在横杆上方一定高度处,左右横杆可绕竖杆连接处的转轴水平转动,二者之间设置嵌合槽;仪器杆置于左右横杆正上方,安装有检测设备、高清摄像头、信息处理器、警示灯、语音警示器、显示屏和太阳能电池板。左右横杆构造相同,采用长度可调的金属管,外部裹覆弹性材料或采用柔性复合消能材料[5],横杆连接处嵌合槽内设置传感器,用于检测横杆是否被撞开。结构如图1所示。
左右竖杆采用横截面为矩形的金属管体,距地面两米内为基础段,内部设置液压升降柱,用于左右横杆的升降,2~4.5米段为高度调节段,用于固定左右横杆及调节高度;左右横杆固定于竖杆内的部分为工字形,外伸部分为裹覆弹性材料的类伞柄空心管状结构,在外伸起点处设置转轴,可水平旋转开合,末端分别设置嵌合块及嵌合槽。
车辆驶入限高检测路段后,由超声波检测设备确定车辆是否超高,若超高,将触发一级预警系统,发出语音及灯光警示[6],拍摄照片并识别车辆信息;若车辆不顾警示仍闯岗,则触发二级警示系统,发出蜂鸣警示,并将照片及车辆信息上传至交通控制中心。若未超高,则正常通过。
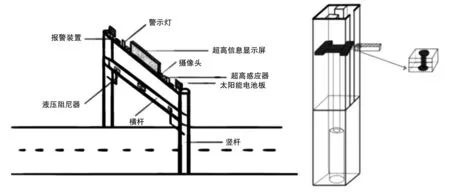
图1 限高架基本结构及竖杆结构
二、车辆高度判断模块
车辆驶入限高检测路段时,首先需对车辆高度进行判断后才可进行后面的一系列流程。车辆高度判断采用HC-SR04超声波测距模块提供的非接触式距离感测功能,在设定好测量距离的前提下依据三角形勾股定理计算出车辆是否超高,或采用高精度毫米波雷达实现目标距离及速度的探测。如图2所示,超声波发射器向限高架前方发出超声波,检测视线与水平面呈一定角度,超声波斜向下发出,探测前方距离为X米处的障碍物,即达到或超过限高高度的超高车辆。倾斜角度根据路况调整,以适应多种路况,其末端高度为路段限高高度,宽度与限高区域宽度一致。正常车辆通过时可正常行驶,超高车辆行驶至超声波可测距离时,触发感应设备,感应设备将信息传输至预警系统。

图2 限高架检测车辆高度工作方法简图
该超声波测距模块由声波发射器、接收器与控制电路三部分组成,包括VCC超声波模块电源脚(正极)、TRIG超声波发送脚、ECHO超声波接收检测脚、GND超声波模块电源脚(负极)四个引脚,确定测试距离X的工作原理如下:一是采用IO口TRIG触发测距,给至少10us的高电平信号;二是模块自动发送8个40khz的方波,自动检测是否有信号返回;三是有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间;四是测试距离X=(高电平时间*声速(340M/S))/2。
三、车辆信息采集处理模块
这一部分在车辆高度判断的基础上,对已触发警报系统的超高车辆进行拍照,之后利用树莓派Opencv进行图像处理采集及车辆信息保存,并将采集的车牌信息传输至警报器和电子显示屏以提醒驾驶员车辆超高。同时可采用实时监控,对实时数据进行分析,监控产生的视频数据可通过图像信息提取关键帧,从而记录视频数据并减少冗余视频数据。摄像头可提供5MP分辨率,500万像素的OV5647感光芯片,车辆识别的基本流程如下。
(一)车牌定位。为降低车牌识别过程中的计算量,使用彩色处理技术截取出只含车牌的图块,对车牌进行定位的操作。
(二)倾斜校正。为减少车牌图像倾斜对车牌识别正确率的影响,对定位后的车牌图像灰度化并对其进行倾斜校正,得到水平方向一致的图片。
(三)字符分割。将校正后的车牌图像中的字符分割出来,得到单个字符图像,为下一步字符识别做准备。
(四)字符识别。将字符分割得到的单个字符与模板库中字符对比,对字符进行识别得到识别结果。
(五)识别成功,信息公示。车牌识别成功,车牌号传输至警报器及电子显示屏,警报器发出“车牌号为xxx的车辆超高”的语音提示,电子屏显示超高车辆的车牌号信息提示其超高。
四、撞击信息采集及警报模块
若超高车辆驾驶员无视警报系统发出的超高警示,仍然向前行驶,当其强行闯岗导致左右横杆上的撞击力大于嵌合部分磁铁块的引力时,左右横杆分别以同侧转轴为轴线向车辆行驶方向转动被推开,嵌合槽内的传感器检测到嵌合块脱离嵌合槽,将信息传输给警报器,警报器二次发出警报声。该部分在整个工作流程中共发挥两次作用,第一次为在接受到主控制板传来的车辆超高信息时进行的一级警报提醒车辆超高,第二次为在一级警报的基础上接收到主控制板传来的撞击信息时进行的二级警报。为达到这一目的,需用到两个传感器模块,即防震传感器模块和有源蜂鸣器模块。
防震模块采用3.3V供电,在不震动情况下呈常闭状态,输出低电平,开关信号指示灯被点亮;震动时候输出高电平,开关信号指示灯熄灭原理如图3所示。有源蜂鸣器模块,工作在3.3V~5V电压之间,采用3.3V供电,模块是低电平有效,即控制器给一个低电平,蜂鸣器响,高电平不响。
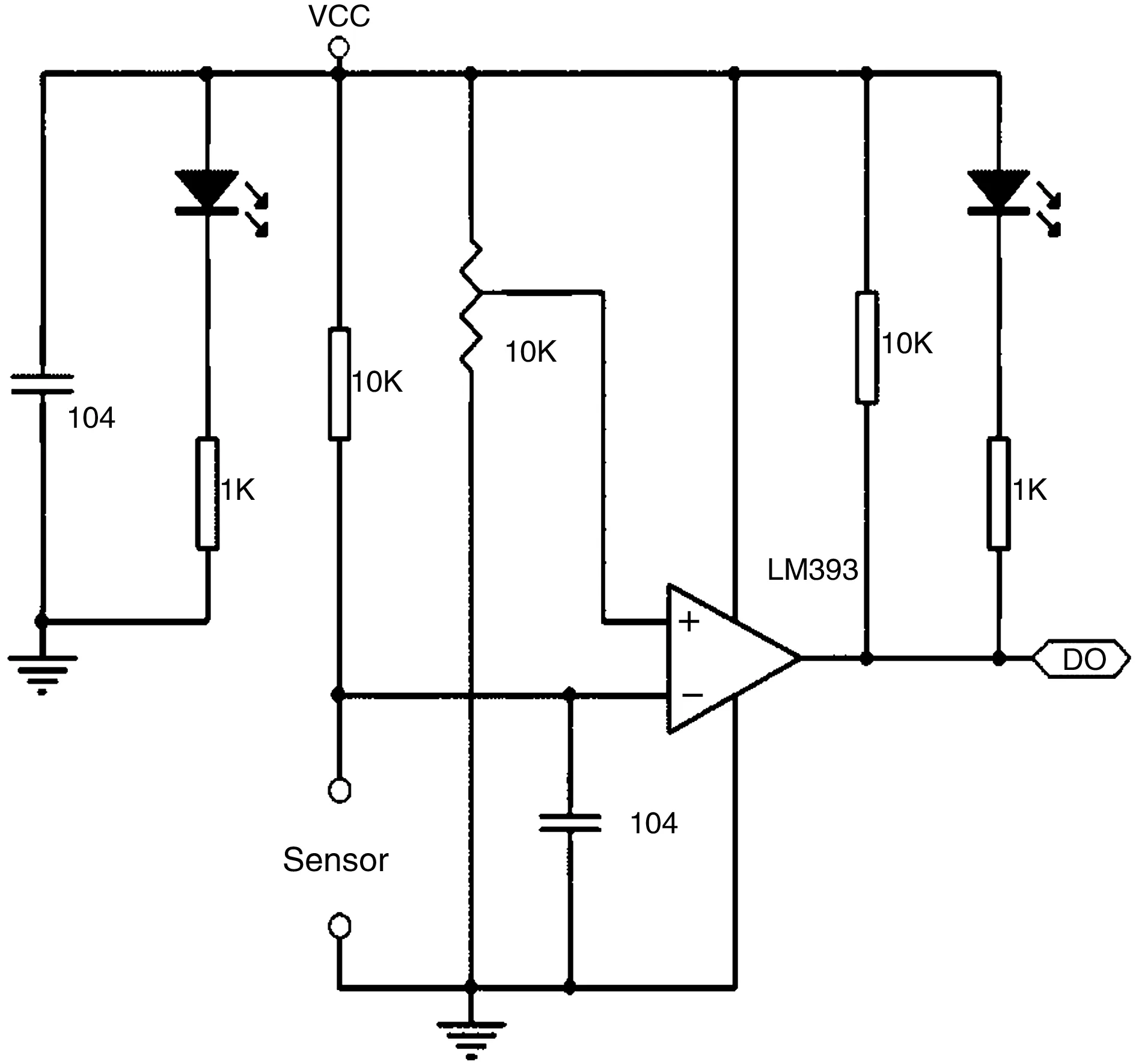
图3 信号指示灯原理图
五、主板控制及信息传输模块
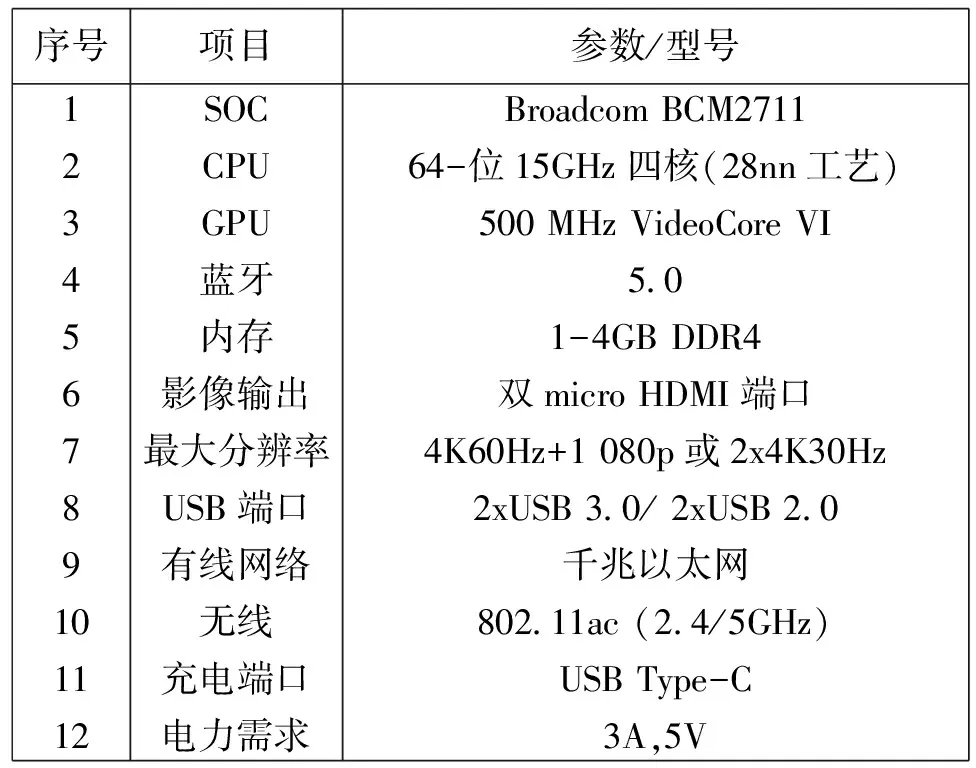
表1 主板控制模块参数表
主板控制模块的主要作用是对车辆信息、测高信息、撞击信息进行处理并对警报模块传输信息,其主控制参数如表1所示。
在超高车辆闯岗且车辆信息被主板控制模块记录后,信息传输模块基于TCP/IP协议,将信息传至服务器端,之后再将闯岗车辆信息、照片记录和路段信息上传至所在区域的交通控制中心,便于事后处理。
六、结语
本文基于智能安全限高架的结构及智能限高系统,提出其工作原理及流程。针对不同限高要求的交通段,可采用不同方案的设计与布置来安装此新型限高架,以达到多重警告、保障安全、保留证据、事前预警、事后惩治、极大降低超高车辆损坏交通设施及发生相关事故的目的,可配合相关交通法对超高司机实行“软阻拦、硬惩罚”的措施,伴以暂扣驾照、处罚金、扣除驾驶分数等惩戒措施来达到警告和惩戒超高车辆驾驶员的目的。限高架本身则采用较软性手段来限拦超高车辆,极大程度上保证车辆、驾乘人员及限高架本身的安全,在此智能限高架后一定距离处设置裹覆弹性材料的刚性限高架及返回路线,以更加安全和有效的方法解决部分限高路段上的限高问题与传统限高架的安全问题,保证了其使用的安全性和合理性,避免了车杆相撞的惨剧及由此造成的经济损失和人员伤亡等一系列问题,具有较高的应用推广价值。
猜你喜欢
山东理工大学学报(自然科学版)(2024年1期)2024-02-15 01:50:48
山西电子技术(2022年1期)2022-02-28 03:30:02
作文周刊·小学五年级版(2021年28期)2021-03-16 09:39:15
科技传播(2019年15期)2019-08-22 08:07:44
新能源科技(2018年5期)2018-02-15 22:22:34
数字传媒研究(2017年11期)2017-02-05 05:12:33
西部广播电视(2016年16期)2016-11-09 03:37:43
阅读与作文(小学高年级版)(2016年10期)2016-10-12 09:54:14
传感器世界(2016年7期)2016-03-25 01:42:42
读者(2012年21期)2012-05-30 22:43:38