基于ADC 法的反舰导弹高空巡航段安控系统效能评估
2022-03-08 06:43卢道伟
火力与指挥控制 2022年1期
岳 健,卢道伟
(解放军92941 部队,辽宁 葫芦岛 125001)
0 引言
在反舰导弹飞行试验中,安控系统对于保护人员生命财产和重要设施安全至关重要。导弹飞行异常时,安控系统能够及时对导弹实施自毁。舵机满偏是常见的自毁方式,可以使导弹快速俯冲坠落,减小侧向散布范围。若反舰导弹在高空巡航段出现异常偏航,由于所处高度较高、飞行速度较大,自毁后侧向散布范围往往较大。此时,安控系统能否快速响应指令完成自毁,成为试验安控方案中划定危险区边界时需重点关注的效能问题。
系统的效能是指系统在规定条件下和规定时间内完成给定任务的能力。常见的效能分析方法主要有ADC 法、层次分析法、SEA 法等。层次分析法适合于具有分层交错评价指标的系统评估。SEA 法是对系统和使命分别独立建模和分析,适合于动态评估系统效能。ADC 法认为系统效能是预期一个系统满足一组特定任务要求程度的量度,是系统可用性(Availability)、可信性(Dependability)和固有能力(Capability)的函数。该方法以系统的总体构成作为研究对象,以完成任务为前提对系统效能进行评估,强调了系统的整体性,概念表达清晰,易于理解,在国内外得到了广泛的应用。于战樵等采用扩展ADC 模型对导弹武器系统进行了效能评估;鞠巍等基于改进的ADC 法建立了反舰导弹武器系统效能评估模型;刘伟等基于ADC 模型对中远程空空导弹武器系统效能进行了分析;刘花云等将导弹飞行初、中、后3个阶段的可信性分解为不同阶段可信性的乘积,给出了一种分阶段的ADC 系统效能评估方法。可见,ADC 法在导弹武器系统效能评估领域得到了普遍认可。
反舰导弹安控系统由多个设备通过串并联关系构成,结构组成清晰,ADC 法尤其适用于该类系统的效能评估。鉴于目前关于反舰导弹安控系统效能评估分析方面的成果较少,本文针对反舰导弹在高空巡航段发生异常偏出安控管道情形,采用ADC法对安控系统效能进行评估分析。
1 ADC 法基本原理
在ADC 模型中,系统效能是可用性、可信性和固有能力三要素的乘积,即:
可信性矩阵D 用下式表示:

2 反舰导弹安控系统
反舰导弹安控系统一般由地面被动安控和弹上自主安控两个主要构成部分相互独立的分系统组成。地面被动安控由地面安控人员通过地面安控设备向弹上发自毁指令完成,其主要依据是地面中心计算机对安控系统信息源提供的导弹实时定位信息和安控管道边界位置关系的判断结果;自主安控由弹上设备根据实时定位信息与预先装定的安控管道边界自主进行判断和执行。自毁指令执行机构为舵机,自毁方式为舵机满偏。典型反舰导弹水平航迹与安控管道关系如图1 所示。
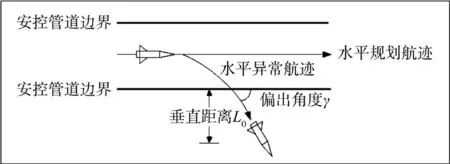
图1 典型反舰导弹水平航迹与安控管道关系示意图
地面被动安控系统由地面安控设备、安控接收器、自毁信号转换装置和执行机构组成;弹上自主安控系统由卫星定位接收器、安控器、惯导系统、自毁信号转换装置和执行机构组成。其中,自毁信号转换装置和执行机构属于两个分系统的共同部分。为便于分析,将地面安控设备、安控接收器构成的子系统称为子系统1,卫星定位接收器、安控器、惯导系统构成的子系统称为子系统2,自毁信号转换装置和执行机构构成的子系统称为子系统3。安控系统结构如下页图2 所示。

图2 安控系统结构
依据不同定位系统的定位精度差异,安控系统信息源设计使用优先级为:地面被动安控系统优先使用从弹上卫星定位接收器遥测下来的定位信息,其次使用地面测控站光学、雷达等测控设备提供的外测信息;弹上自主安控系统会对卫星定位信息可用状态进行判断,若卫星定位信息可用,则使用弹上卫星定位接收器接收的卫星定位信息,否则使用弹上惯导系统提供的定位信息。从决定实施自毁到弹上舵机满偏完毕,往往存在时间延迟效应。地面被动安控系统时间延迟因素主要包括:地面安控人员反应操作时间、弹上指令接收处理时间、舵机执行时间;弹上自主安控系统时间延迟因素主要包括:弹上自主安控判断时间、舵机执行时间。
3 高空巡航段安控系统效能评估模型
一般认为,实施安控后舵机满偏完毕时导弹越过安控管道边界的垂直距离越短越好。经蒙特卡洛仿真计算发现,考虑各种误差和高空风的影响,在速度和最小拐弯半径一定的情况下,反舰导弹在高空巡航段发生异常时存在一个最大偏出角度,此时越过安控管道边界的垂直距离最大。针对此种情形,本文以反舰导弹实施安控后越过安控管道边界某一固定垂直距离以内舵机满偏完毕作为安控系统需要完成的任务。
3.1 安控系统状态分析
每一种设备只有正常工作和故障两种状态。对图2 所示安控系统的结构组成进行分析,安控系统的初始状态可划分为以下几种:
1)子系统1、子系统2 中全部设备、子系统3正常工作;
2)子系统1、子系统2 中卫星定位接收器、子系统2 中安控器、子系统3 正常工作,子系统2 中惯导系统故障;
3)子系统1、子系统2 中惯导系统、子系统2中安控器、子系统3 正常工作,子系统2 中卫星定位接收器故障;
4)子系统2 中全部设备、子系统3 正常工作,子系统1 故障;
5)子系统2 中卫星定位接收器、子系统2 中安控器、子系统3 正常工作,子系统2 中惯导系统、子系统1 故障;
6)子系统2 中惯导系统、子系统2 中安控器、子系统3 正常工作,子系统2 中卫星定位接收器、子系统1 故障;
7)子系统1、子系统3 正常工作,子系统2故障;
8)子系统3 正常工作,子系统1、子系统2故障;
9)子系统3 故障。
3.2 安控系统可用性分析
设备正常工作的概率α 由下式可得:

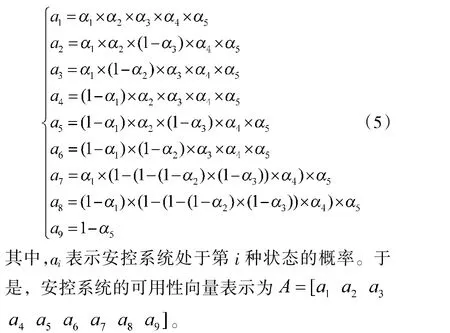
分别用α、α、α、α、α表示子系统1 正常工作的概率、子系统2 中卫星定位接收器正常工作的概率、子系统2 中惯导系统正常工作的概率、子系统2 中安控器正常工作的概率、子系统3 正常工作的概率。根据各个设备的串并联关系,安控系统9 种初始状态概率可以用各个设备正常工作的概率表示为:
3.3 安控系统可信性分析

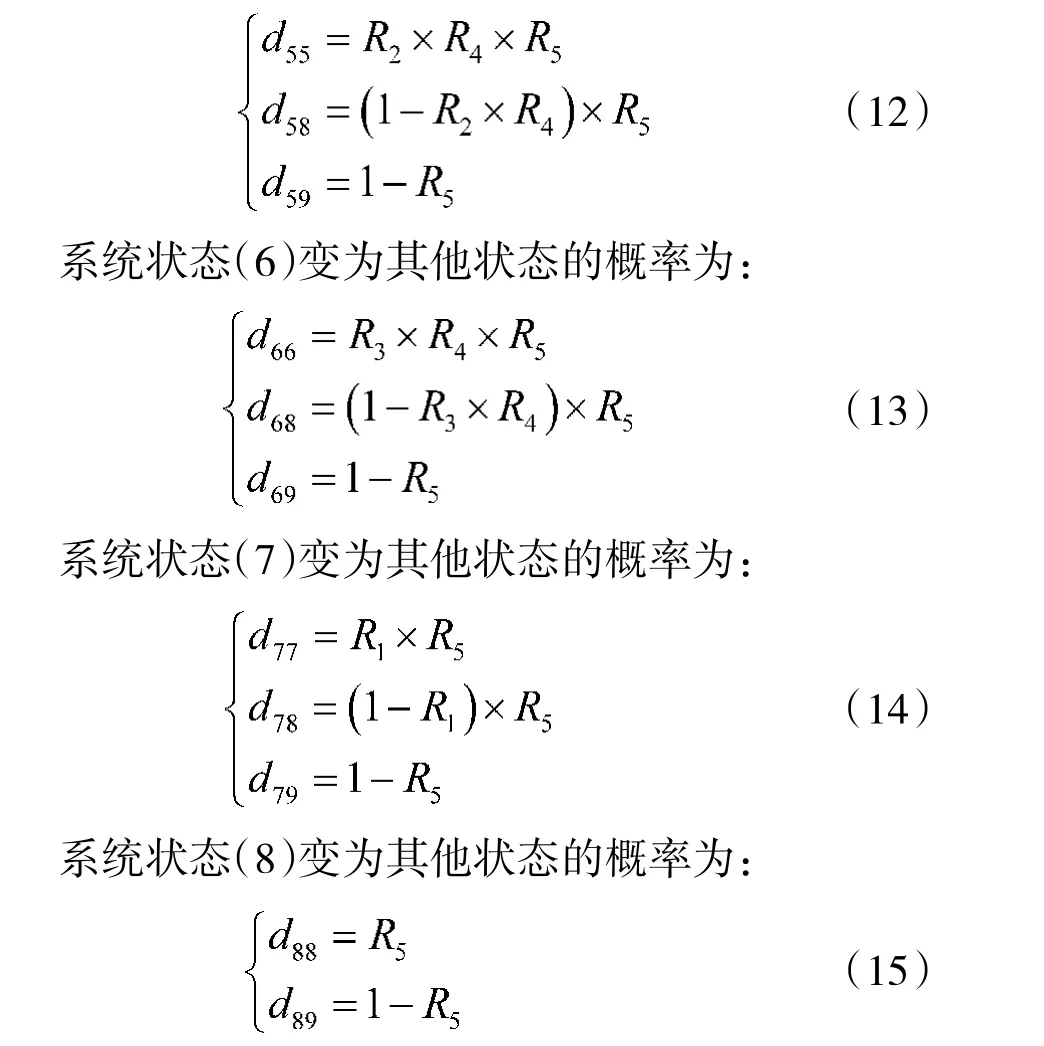
系统状态(9)变为其他状态的概率为d=1。
3.4 安控系统固有能力分析
综合信息源设计使用原则、时间延迟效应、不同定位系统定位精度差异,以及可能的导弹姿态剧烈变化导致卫星无法定位等因素分析可知,导弹开始执行安控时的位置和舵机满偏完毕时的位置并非恒定不变,而是处在一个距离范围内。
当只有地面被动安控系统能够正常工作时,在高空巡航段安控系统完成任务的概率假设为p;当只有弹上自主安控系统中卫星定位接收器、安控器、自毁信号转换装置、执行机构正常工作时,在高空巡航段安控系统完成任务的概率假设为p;当只有弹上自主安控系统中惯导系统、安控器、自毁信号转换装置、执行机构正常工作时,在高空巡航段安控系统完成任务的概率假设为p。
根据安控系统各设备的联接关系,不同状态下系统完成任务概率c分别为:


4 算例
针对某反舰导弹,作如下假设:
1)自安控系统启动到高空巡航段结束,安控系统执行任务时间为10 min,且出现故障后不能修理。系统各设备的平均故障间隔时间(MTBF)和平均故障修复时间(MTTR)如表1 所示。
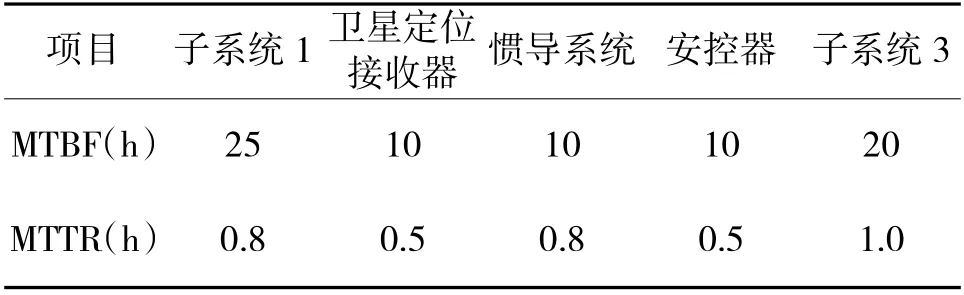
表1 各设备的平均故障间隔时间和平均故障修复时间
2)地面安控人员反应操作时间约为t=1 s~2 s、弹上指令接收处理时间为t=0.5 s、弹上自主安控判断时间为t=1 s、舵机执行时间为t=0.1 s。
3)卫星定位精度为δ=10 m,地面测控站外测精度为δ=100 m,弹上惯导系统提供的定位精度在高空巡航段为δ=500 m。
4)反舰导弹在高空巡航段发生异常时的速度为v=850 m/s,最大偏出角度为γ=35°。
5)发生导弹姿态剧烈变化导致卫星无法定位情形的概率为p=0.05。
6)本算例以实施安控后导弹越过安控管道边界L=900 m垂直距离以内,舵机满偏完毕作为安控系统需要完成的任务。
4.1 可用性向量计算
由式(4)得:

于是,由式(5)得到安控系统的可用性向量为:A=[0.775 0 0.062 0 0.038 8 0.024 8 0.002 0 0.001 2 0.047 1 0.001 5 0.047 6]
4.2 可信性矩阵计算

进一步得到安控系统可信性矩阵为:

4.3 固有能力向量计算

若发生导弹姿态剧烈变化导致卫星无法定位情形,则使用地面测控站提供的外测信息。实施安

4.4 效能计算
最后,计算得到反舰导弹高空巡航段安控系统的效能为:

从效能评估结果来看,反舰导弹在高空巡航段发生异常,在速度和最小拐弯半径一定的情况下,以最大偏出角度越过安控管道边界时,综合考虑安控系统初始状态、状态变化和固有能力,安控系统能够完成“实施安控后导弹越过安控管道边界L=900 m 垂直距离以内舵机满偏完毕”这一任务的概率为0.884 0,安控系统效能处于较高的水准。
5 结论
反舰导弹飞行试验安控方案中危险区边界的划定离不开对安控系统效能的研究。本文采用ADC 法对反舰导弹高空巡航段安控系统开展了效能评估,通过算例验证了效能评估模型的有效性,所采用方法对于评估其他类型导弹安控系统效能具有参考价值。
猜你喜欢
中国新技术新产品(2022年15期)2022-11-08
导弹与航天运载技术(2022年2期)2022-05-09
载人航天(2021年5期)2021-11-20
电子乐园·下旬刊(2021年3期)2021-02-08
科学与信息化(2020年20期)2020-10-12
红蜻蜓(2017年6期)2017-10-30
支点(2016年11期)2016-12-22
航空模型(2016年5期)2016-07-25
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21